WSL2(Windows Subsystem for Linux 2)默认情况下无法直接访问 USB 设备,包括摄像头。本文将详细介绍如何通过重新编译 WSL2 内核来启用 USB 摄像头支持。
前言
要在 WSL2 中使用 USB 摄像头,我们需要完成以下三个主要步骤:
- 将摄像头从 Windows 连接到 WSL2
- 重新编译 WSL2 Linux 内核以包含摄像头驱动
- 配置 WSL2 使用新编译的内核
一、将摄像头连接到 WSL2
1.1 安装 USB/IP 工具
以管理员身份打开 PowerShell,执行以下命令安装 usbipd:
winget install usbipd1.2 列出已连接的 USB 设备
usbipd list该命令会显示所有连接到系统的 USB 设备,找到你的摄像头对应的 BUSID(例如 1-6)。
1.3 绑定摄像头设备
将摄像头绑定以便共享给 WSL2(假设摄像头的 BUSID 是 1-6):
usbipd bind -b 1-61.4 验证绑定状态
再次查看设备列表,确认摄像头状态已更新为 Shared:
usbipd list
1.5 将设备附加到 WSL2
usbipd attach -w -b 1-6再次运行usbpid list, 摄像头STATE变为Attached
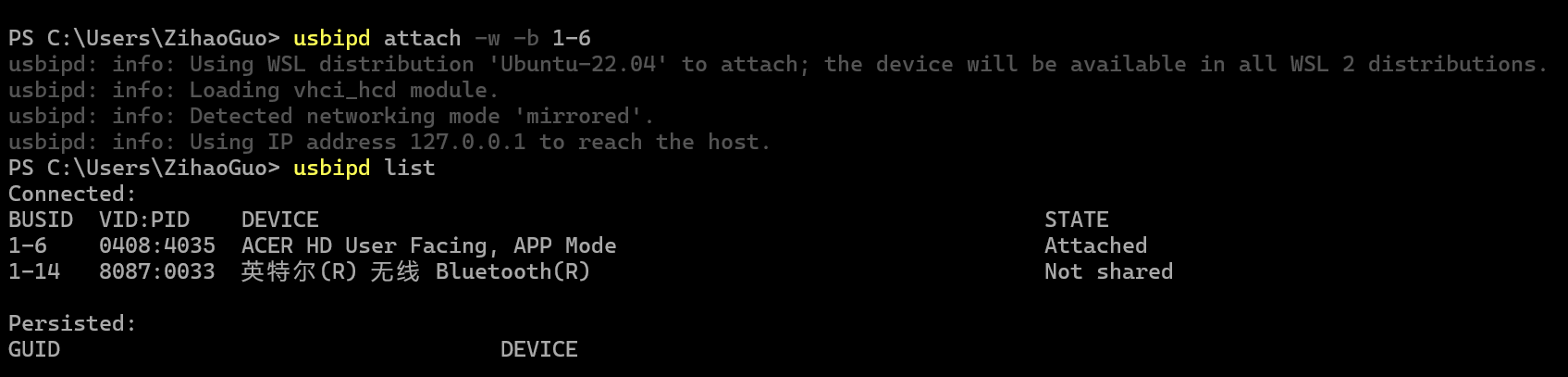
1.6 在 WSL2 中验证连接
打开 WSL2 终端,使用以下命令验证摄像头已成功连接:
lsusb如果看到摄像头设备信息,说明连接成功。
然而此时运行调用摄像头的代码,会显示报错,因为WSL2是一个独立的子系统,并没有摄像头驱动,需要继续重新编译内核
[ WARN:0@8.994] global cap_v4l.cpp:914 open VIDEOIO(V4L2:/dev/video0): can't open camera by index
[ WARN:0@8.994] global cap.cpp:478 open VIDEOIO(V4L2): backend is generally available but can't be used to capture by index
无法打开摄像头 0
错误: 无法打开摄像头二、重新编译 WSL2 Linux 内核
2.1 更新 WSL
在 PowerShell 中执行:
wsl --update2.2 安装编译依赖
在 WSL2 Ubuntu 终端中,更新系统并安装必要的编译工具:
sudo apt update && sudo apt upgrade -y && sudo apt install -y build-essential flex bison dwarves libssl-dev libelf-dev libncurses-dev2.3 检查 WSL2 内核版本
uname -r记录输出的版本号,例如 6.6.87.2-microsoft-standard-WSL2。
2.4 下载对应版本的内核源码
根据上一步获取的版本号,下载对应的 WSL2 内核源码:
cd /usr/src
TAGVERNUM=6.6.87.2
TAGVER=linux-msft-wsl-${TAGVERNUM}
sudo git clone \
-b ${TAGVER} \
https://github.com/microsoft/WSL2-Linux-Kernel.git \
${TAGVERNUM}-microsoft-standard \
&& cd ${TAGVERNUM}-microsoft-standard2.5 准备内核配置文件
sudo cp /proc/config.gz config.gz \
&& sudo gunzip config.gz \
&& sudo mv config .config2.6 配置内核选项
启动内核配置界面:
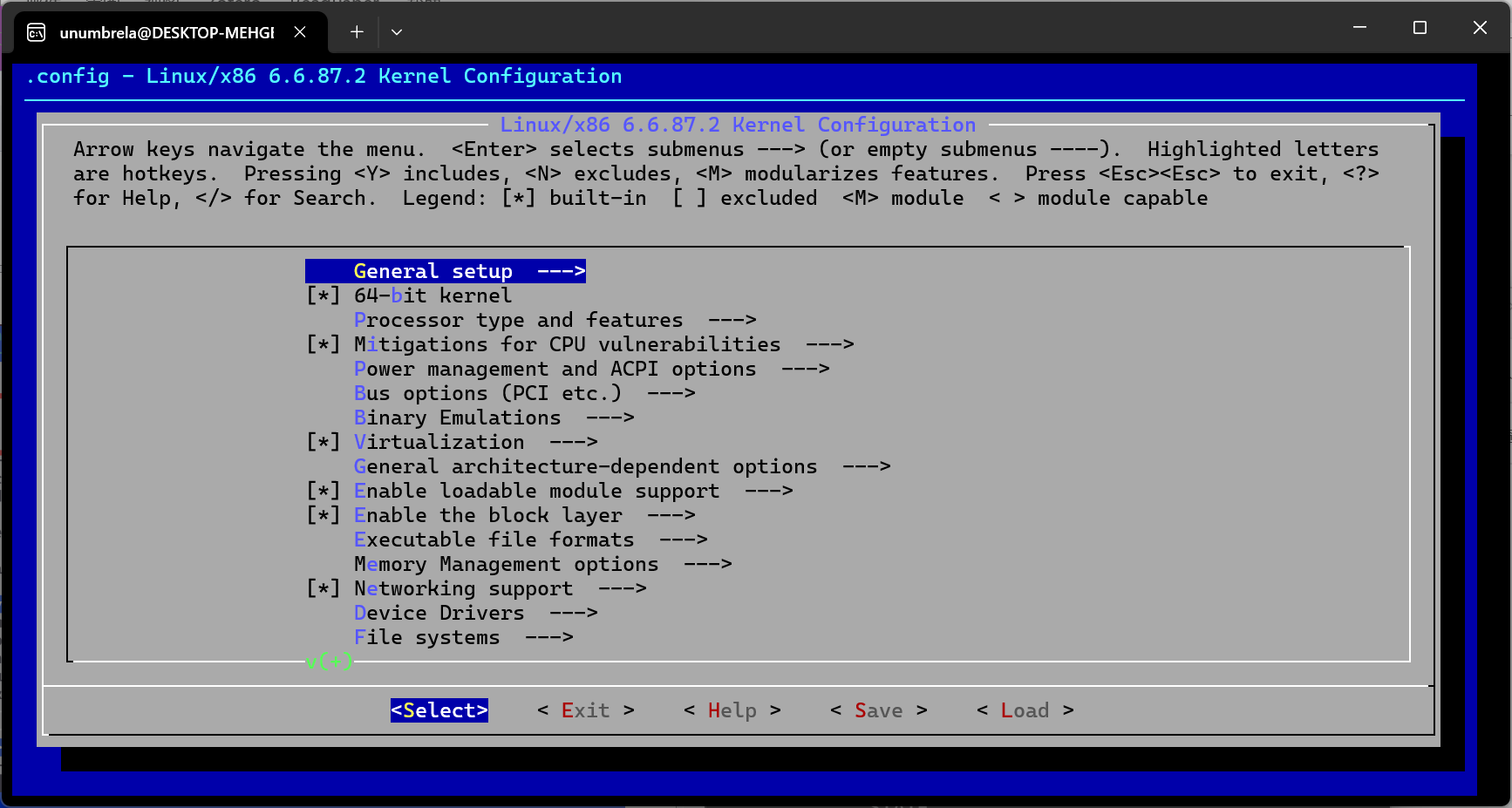
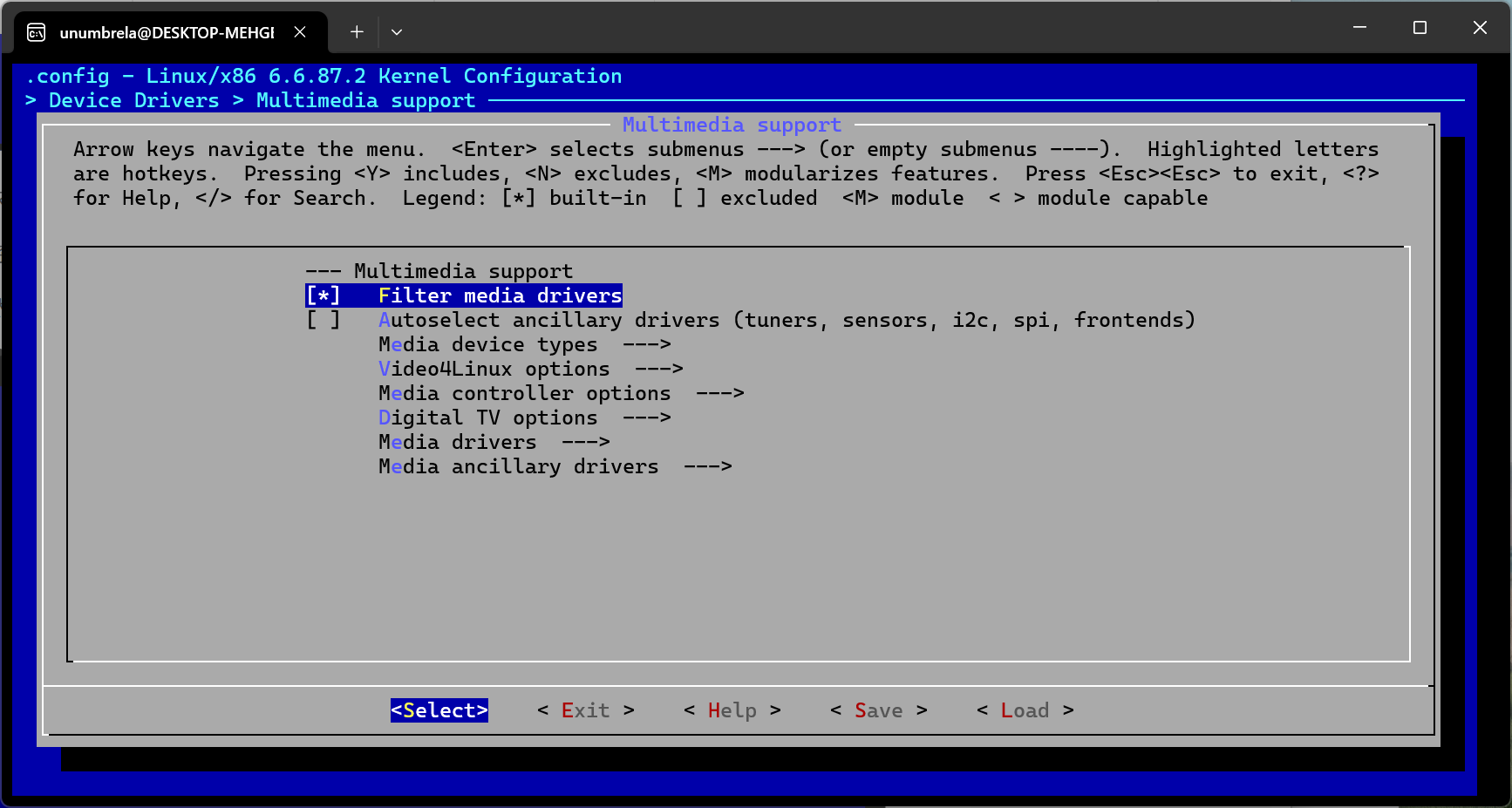
依次选择Device Drivers - Multimedia support
将Filter media drivers 的方框中按Y,注意按Y以后显示的是 *
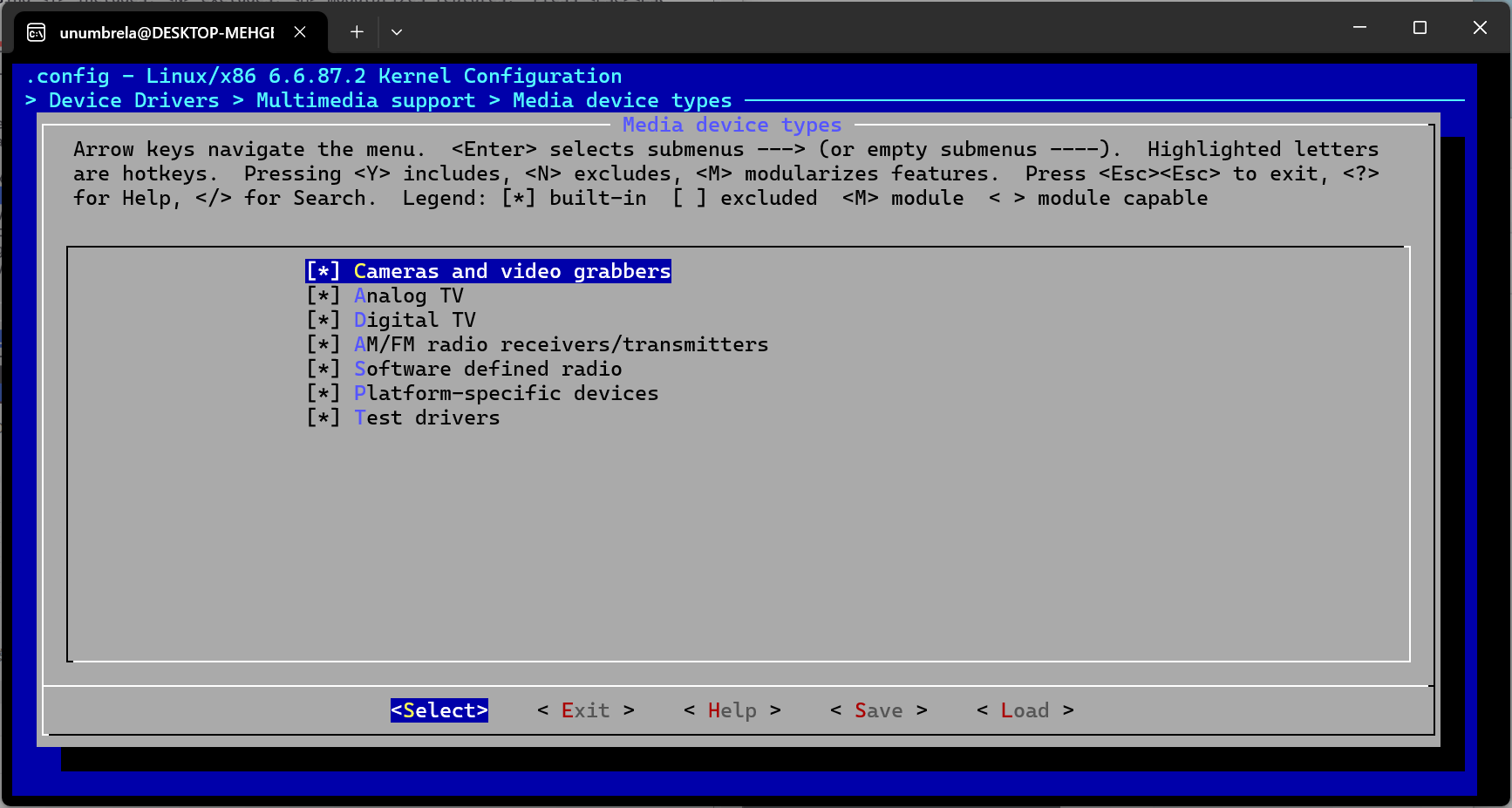
然后继续来到Media device types,Cameras and video grabbers 方框输入Y
上述流程可总结如下
sudo make menuconfig
```
在配置界面中,使用方向键导航,按 `Y` 键选中选项(选中后会显示 `[*]`),按照以下路径启用所需的驱动:
**必须启用的选项:**
```
Device Drivers
→ Multimedia support
→ Filter media drivers [Y]
→ Media device types
→ Cameras and video grabbers [Y]操作说明:
- 使用方向键上下移动
- 按
Enter进入子菜单 - 按
Y启用选项(显示为[*]) - 按
N禁用选项 - 按
M编译为模块(显示为<M>)
配置完成后,选择 Save 保存配置,然后选择 Exit 退出。
2.7 编译内核
使用多核并行编译以加快速度:
sudo make -j$(nproc) KCONFIG_CONFIG=.config \
&& sudo make modules_install -j$(nproc) \
&& sudo make install -j$(nproc)编译过程可能需要较长时间,请耐心等待。
三、安装和配置新内核
3.1 复制内核文件到 Windows
编译完成后,将生成的 vmlinux 内核文件复制到 Windows 系统:
sudo cp vmlinux /mnt/c/Users/<UserName>/WSL2/kernel-6.6.87.2注意:将
<UserName>替换为你的 Windows 用户名,目标路径可以自定义。而且这是将内核文件改路径以后重命名为kernel-6.6.87.2,不是放到kernel-6.6.87.2文件夹中
3.2 创建 WSL 配置文件
在 Windows 用户目录下创建 .wslconfig 配置文件:
vim /mnt/c/Users/<UserName>/.wslconfig按 i 键进入编辑模式,添加以下内容:
[wsl2]
kernel=C:\\Users\\<UserName>\\WSL2\\kernel-6.6.87.2注意:
- 将
<UserName>替换为你的 Windows 用户名- Windows 路径需要使用双反斜杠
\\
按 ESC 退出编辑模式,输入 :wq 保存并退出。
四、测试摄像头
4.1 重启 WSL2
在 PowerShell 中执行:
wsl --shutdown4.2 重新连接摄像头
usbipd attach -w -b 1-64.3 验证设备连接
在 WSL2 终端中:
lsusb4.4 验证新内核加载
检查内核版本,如果成功加载自定义内核,版本号末尾会显示 + 号:
uname -r -v
```
输出示例:
```
6.6.87.2-microsoft-standard-WSL2+ 4.5 安装和测试摄像头应用
安装 V4L 工具和摄像头查看器:
sudo apt install v4l-utils guvcview启动摄像头应用:
sudo guvcview如果一切正常,你应该能看到摄像头的实时画面。
4.6 使用OpenCV
继续在WSL2中新建如下python脚本,使用OpenCV展示
python
import cv2
cap = cv2.VideoCapture(0) # /dev/video0
cap.set(3,640)
cap.set(4,480)
cap.set(cv2.CAP_PROP_FPS,10)
#cap.set(cv2.CAP_PROP_FOURCC,cv2.VideoWriter.fourcc('Y','U','Y','V')) # 下面不行可以尝试这个
cap.set(cv2.CAP_PROP_FOURCC,cv2.VideoWriter.fourcc('M','J','P','G'))
while(True):
ret, frame = cap.read()
if not ret:
print("Failed to read the image.")
break
cv2.imshow('Video', frame)
key = cv2.waitKey(1)
cap.release()即可成功调用摄像头
参考资料
- PINTO0309/wsl2_linux_kernel_usbcam_enable_conf
- WSL2 Webcam Support - Medium
- https://blog.csdn.net/chengpengfei09121870/article/details/142762468?ops_request_misc=elastic_search_misc&request_id=db0ed97b4b37eb05f6c98156194cf227&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~ElasticCommercialInsert~search_v2-3-142762468-null-null.142^v102^pc_search_result_base3&utm_term=WSL2%E8%B0%83%E7%94%A8%E6%91%84%E5%83%8F%E5%A4%B4&spm=1018.2226.3001.4187
总结
通过重新编译 WSL2 内核并启用相应的 USB 摄像头驱动,我们可以在 WSL2 环境中成功使用 USB 摄像头。虽然这个过程较为复杂,但一旦配置完成,就可以在 Linux 环境中进行各种摄像头相关的开发和测试工作。
希望本教程对你有所帮助!如有问题,欢迎在评论区讨论。