0.准备
ros2 版本 humble
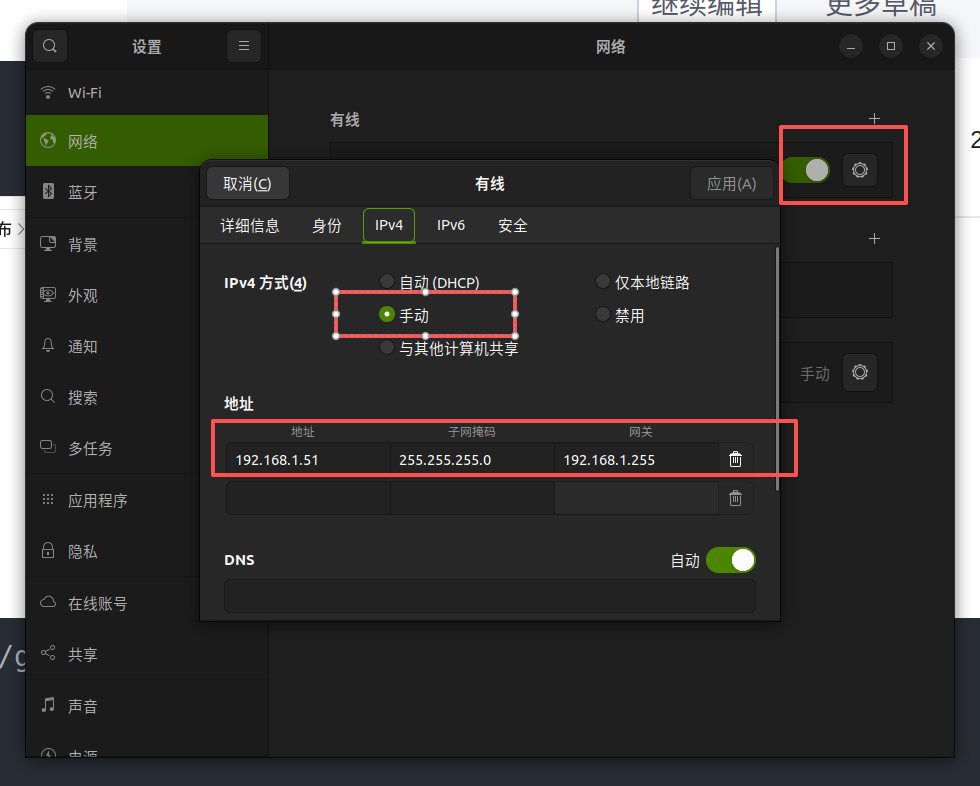
给雷达供电接入电脑,设置静态ip
雷达的ip地址为192.168.1.1xx,其中的xx是贴在雷达上面的SN码的最后两位数我的是92
所以ip为192.168.1.192
1.sdk2
bash
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install1.1删除sdk如下
bash
sudo rm -rf /usr/local/lib/liblivox_lidar_sdk_*
sudo rm -rf /usr/local/include/livox_lidar_*2.livox_ros_driver2
获取工作空间
bash
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
bash
cd ws_livox/src/livox_ros_driver2
bash
./build.sh humble3.修改/ws_livox/src/livox_ros_driver2/config/mid360配置文件
参考如下
bash
{
"lidar_summary_info" : {
"lidar_type": 8
},
"MID360": {
"lidar_net_info" : {
"cmd_data_port": 56100,
"push_msg_port": 56200,
"point_data_port": 56300,
"imu_data_port": 56400,
"log_data_port": 56500
},
"host_net_info" : {
"cmd_data_ip" : "192.168.1.51",
"cmd_data_port": 56101,
"push_msg_ip": "192.168.1.51",
"push_msg_port": 56201,
"point_data_ip": "192.168.1.51",
"point_data_port": 56301,
"imu_data_ip" : "192.168.1.51",
"imu_data_port": 56401,
"log_data_ip" : "",
"log_data_port": 56501
}
},
"lidar_configs" : [
{
"ip" : "192.168.1.192",
"pcl_data_type" : 1,
"pattern_mode" : 0,
"extrinsic_parameter" : {
"roll": 0.0,
"pitch": 0.0,
"yaw": 0.0,
"x": 0,
"y": 0,
"z": 0
}
}
]
}4.修改动态链接库路径
错误信息: livox_ros_driver2_node-1 抛出 "class_loader::LibraryLoadException" 异常 livox_ros_driver2_node-1 具体错误:无法加载库 dlopen 错误:liblivox_lidar_sdk_shared.so - 无法打开共享对象文件(文件不存在),位于 ./src/shared_library.c:99
bash
# 找到 Livox SDK 安装位置
find ~ -name "liblivox_lidar_sdk_shared.so" 2>/dev/null请确保将 SDK 文件 liblivox_lidar_sdk_shared.so 手动复制到 ~/ws_livox/install/livox_ros_driver2/lib 目录下,否则运行时会报错
5.通过rviz2查看点云
bash
colcon build
bash
source install/setup.bash
bash
ros2 launch livox_ros_driver2 rviz_MID360_launch.py 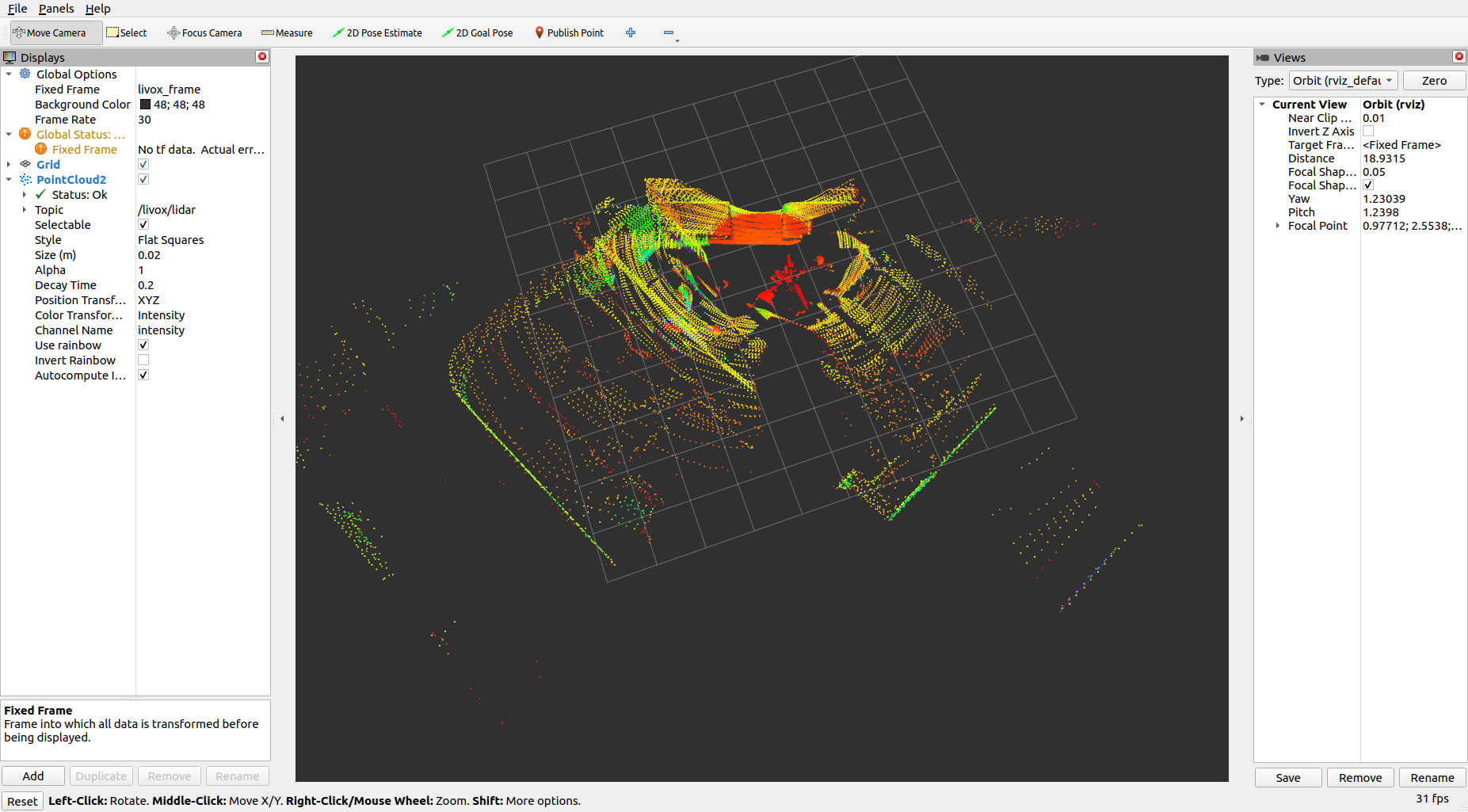
更多细节查看livox-wiki