解决 PX4 + ROS px4ctrl 「No odom!」自动起飞失败问题
在基于 PX4 1.16.0 固件 + ROS 开发无人机自动控制功能时,遇到 [ERROR] [px4ctrl] Reject AUTO_TAKEOFF. No odom! 错误,导致无人机无法执行自动起飞指令。本文将详细梳理问题排查流程与最终解决方案,帮助同类型开发者避坑。
一、问题现象
启动 px4ctrl 节点与自动起飞指令后,终端持续输出错误日志:
[ERROR] [1768385602.814547638]: [px4ctrl] Reject AUTO_TAKEOFF. No odom!同时,px4ctrl 正常输出电池电压信息,说明供电与节点基础通信无问题,核心故障点为里程计数据缺失。
二、核心原因分析
px4ctrl 执行自动起飞的前提是获取有效里程计(Odometry)数据,用于无人机定位与姿态解算。里程计数据缺失的常见诱因包括:
- 里程计话题映射错误 :
px4ctrl订阅的话题无有效数据或话题名不匹配; - 飞控参数配置异常:PX4 未启用正确的定位数据源(如视觉、GPS);
- MAVROS 通信或参数交互故障:无法正常读写飞控定位相关参数。
三、分步排查与解决
1. 排查飞控参数
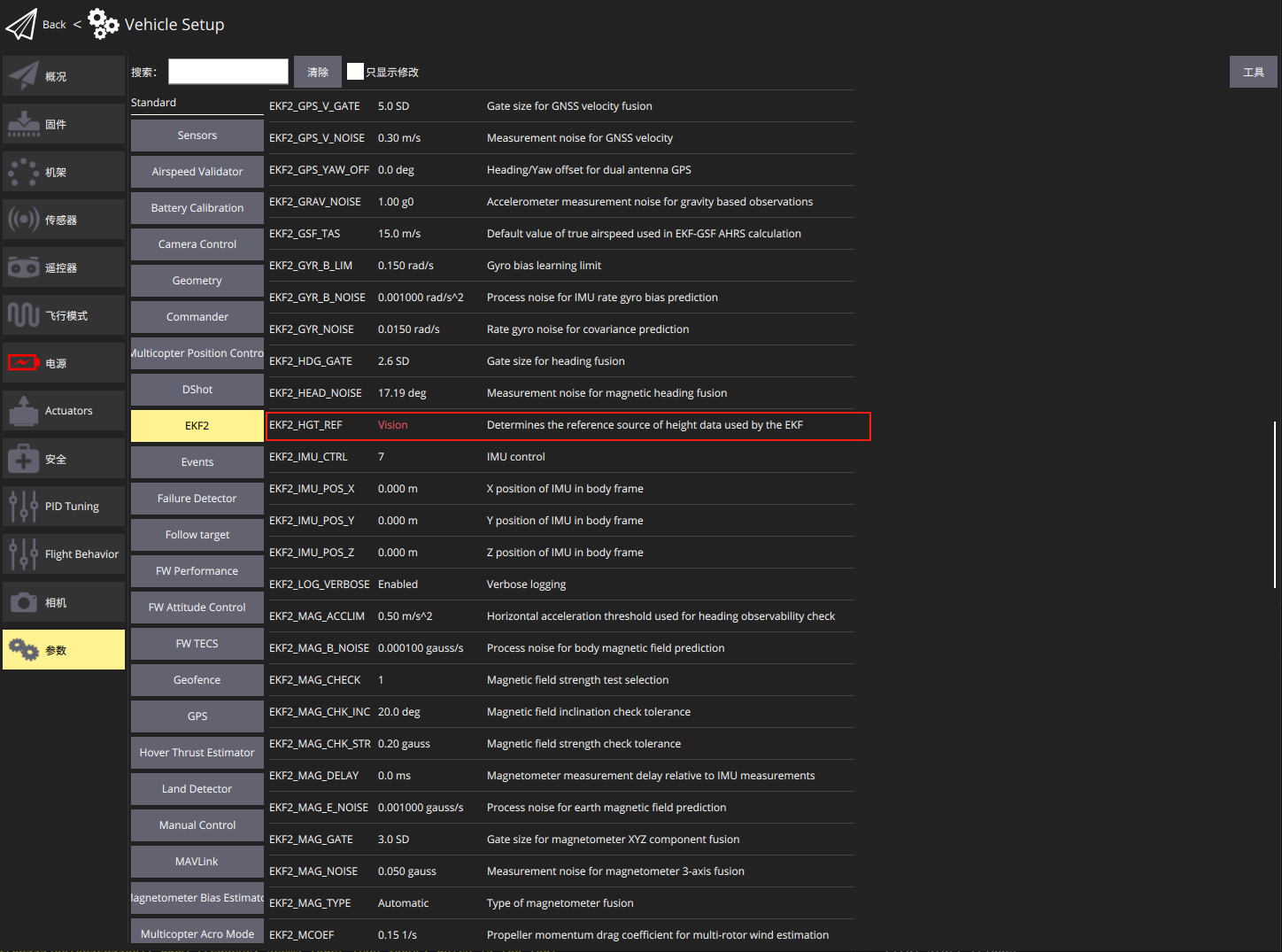
打开QGC,搜索参数aid,找到EKF2_EV_CTRL,修改为以下值:
 找到
找到EKF2_HGT_REF,修改为以下值:
2. 定位里程计话题映射错误
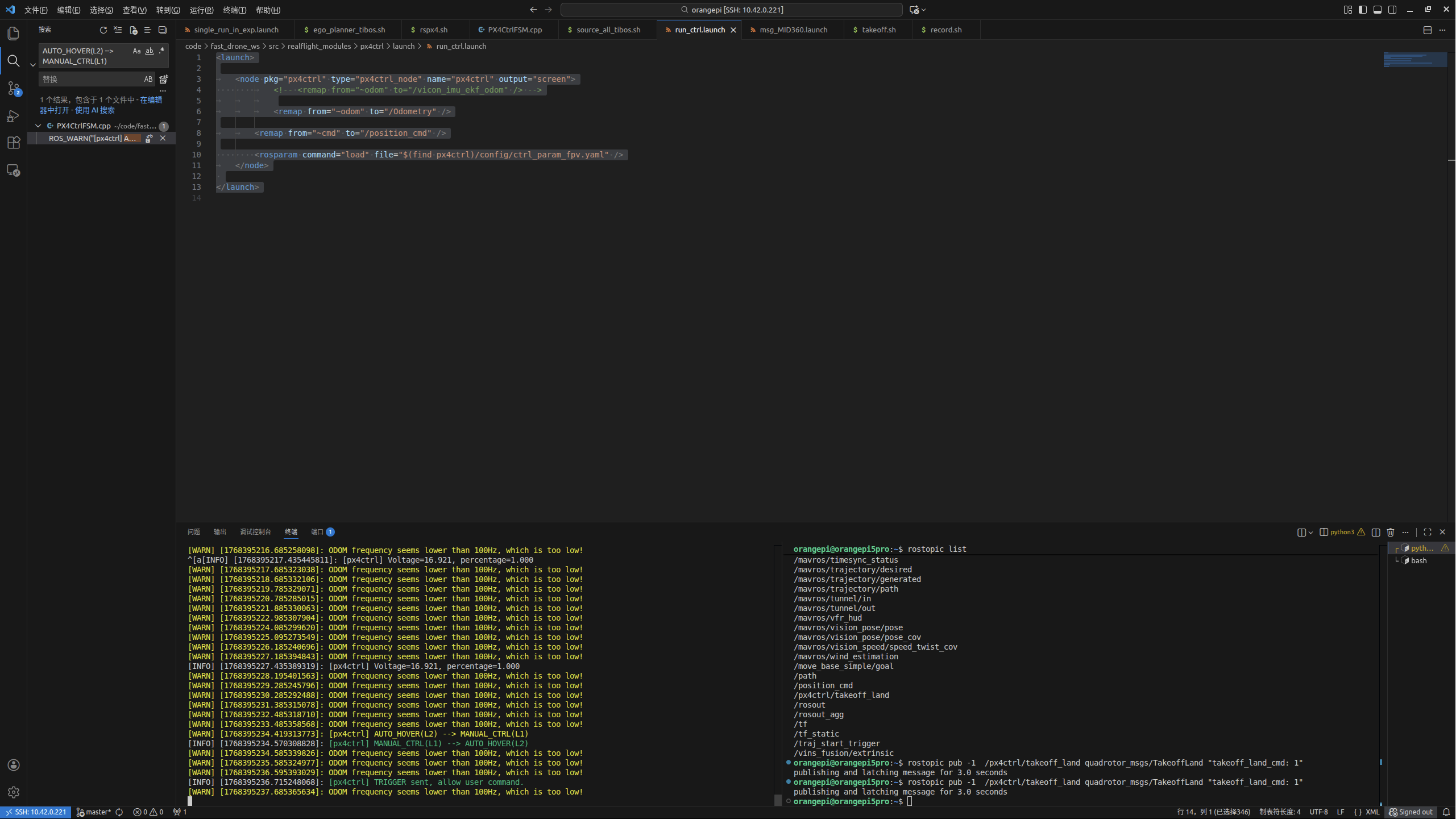
查看 px4ctrl 启动文件 run_ctrl.launch,发现初始配置的里程计话题为 /vins_fusion/imu_propagate:
xml
<launch>
<node pkg="px4ctrl" type="px4ctrl_node" name="px4ctrl" output="screen">
<remap from="~odom" to="/vins_fusion/imu_propagate" />
<remap from="~cmd" to="/position_cmd" />
<rosparam command="load" file="$(find px4ctrl)/config/ctrl_param_fpv.yaml" />
</node>
</launch>通过 ROS 命令验证该话题状态:
bash
# 查看话题是否存在
rostopic list | grep /vins_fusion/imu_propagate
# 查看话题数据
rostopic echo /vins_fusion/imu_propagate -n 5确认该话题无有效数据输出,说明当前映射的话题并非实际的里程计数据源。
3. 修改话题映射,接入有效里程计数据
经确认,实际环境中发布有效里程计数据的话题为 /Odometry。修改 run_ctrl.launch 的话题重映射配置:
xml
<launch>
<node pkg="px4ctrl" type="px4ctrl_node" name="px4ctrl" output="screen">
<!-- 将 ~odom 映射到实际有效里程计话题 /Odometry -->
<remap from="~odom" to="/Odometry" />
<remap from="~cmd" to="/position_cmd" />
<rosparam command="load" file="$(find px4ctrl)/config/ctrl_param_fpv.yaml" />
</node>
</launch>4. 验证修复效果
重启 px4ctrl 节点,执行以下命令验证里程计数据:
bash
rostopic echo /Odometry --noarr -n 3当输出的 pose.pose.position 为非零值、header.stamp 持续递增时,说明里程计数据有效。此时观察 px4ctrl 日志,No odom! 错误消失,自动起飞功能可正常执行。
四、关键注意事项
- ROS 话题大小写敏感 :本文中有效话题为
/Odometry(首字母大写),需严格匹配实际发布的话题名称,大小写错误会直接导致数据订阅失败。 - 话题重映射优先级高于配置文件 :
launch文件中的<remap>标签优先级高于px4ctrl配置文件中的odom_topic参数,调试时优先检查launch文件配置。 - 参数配置需配合数据源 :若使用视觉定位等外置里程计,需后续通过 MAVROS 设置
EKF2_AID_MASKEKF2_HGT_MODE等参数,确保 PX4 启用对应定位数据源。
五、总结
本次问题的核心是里程计话题映射错误 ,导致 px4ctrl 无法获取定位数据。在 PX4 + ROS 无人机开发中,硬件与软件的数据源匹配是核心要点,排查时应遵循 「先验证数据有效性,再调整配置」 的原则,可大幅提升问题解决效率。