博主介绍:✌全网粉丝10W+,前互联网大厂软件研发、集结硕博英豪成立软件开发工作室,专注于计算机相关专业项目实战6年之久,累计开发项目作品上万套。凭借丰富的经验与专业实力,已帮助成千上万的学生顺利毕业,选择我们,就是选择放心、选择安心毕业✌
> 🍅想要获取完整文章或者源码,或者代做,拉到文章底部即可与我联系了。🍅🍅感兴趣的可以先收藏起来,点赞、关注不迷路,大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助同学们顺利毕业 。🍅
1、毕业设计:2026年计算机专业毕业设计选题汇总(建议收藏)✅
1、项目介绍
技术栈:
Python语言、深度学习、PyTorch、YOLOv8、PySide界面设计、VisDrone数据集、无人机目标检测
2、项目界面
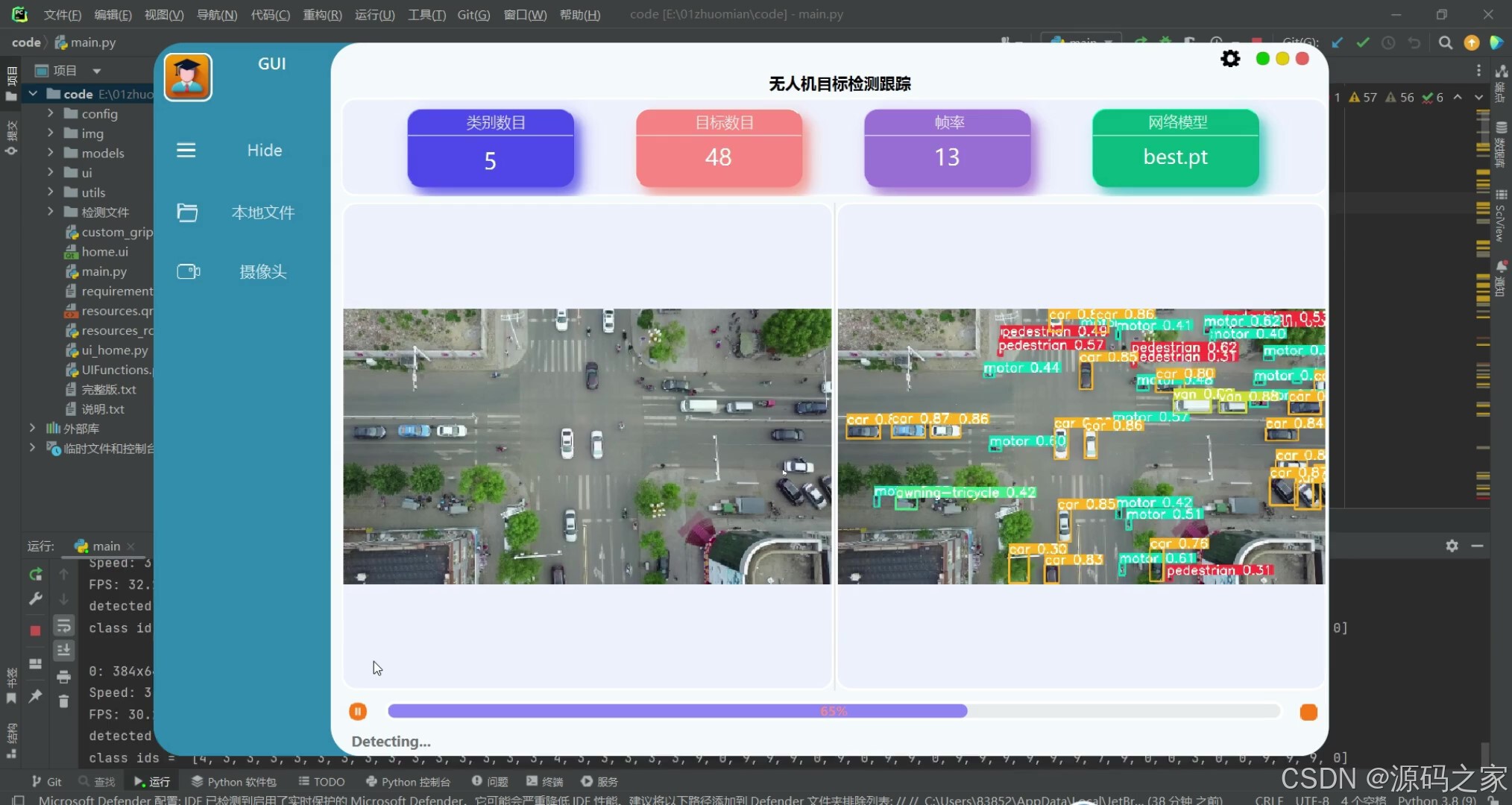
(1)无人机目标检测跟踪界面
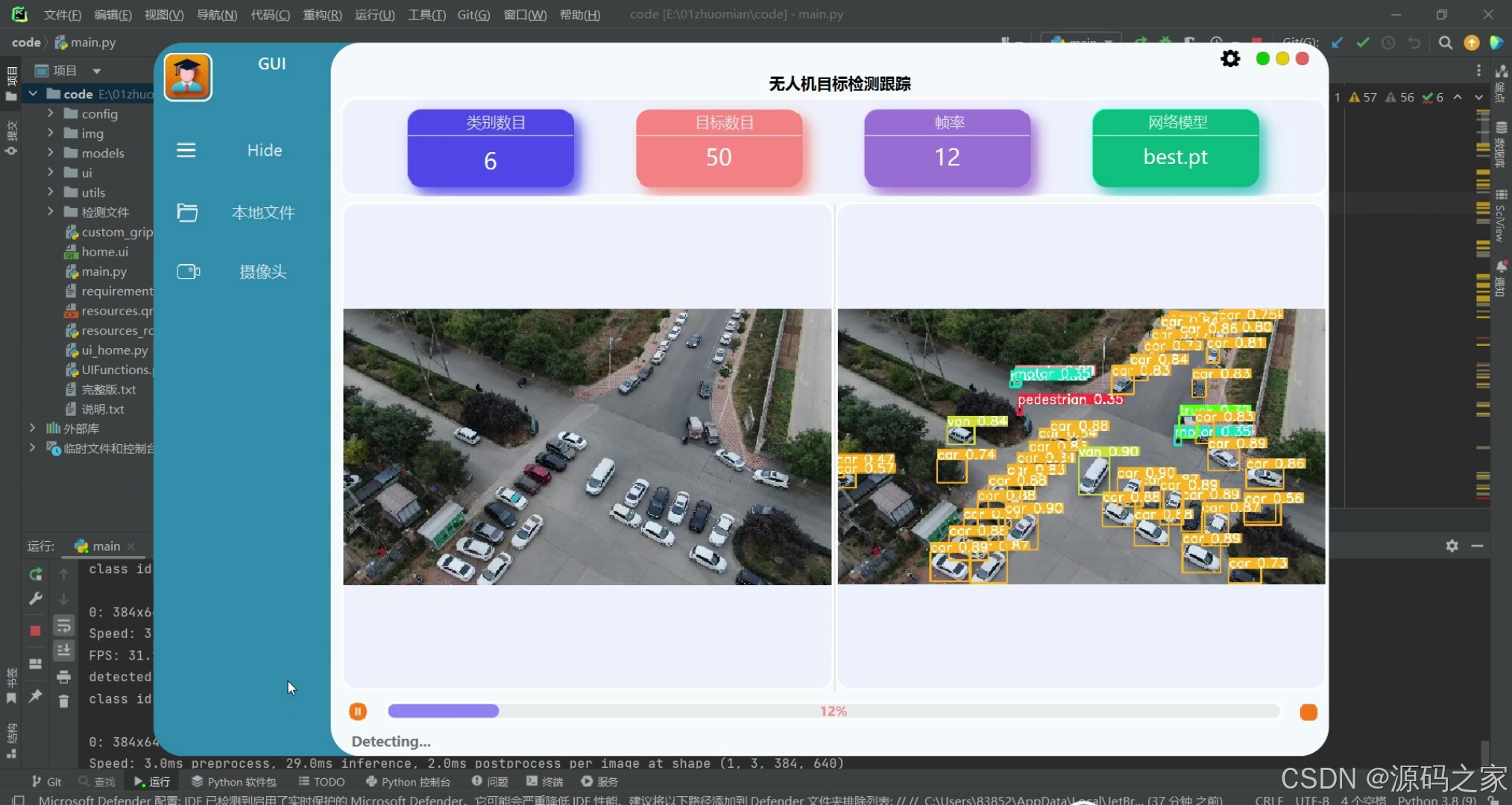
(2)无人机目标检测跟踪界面2
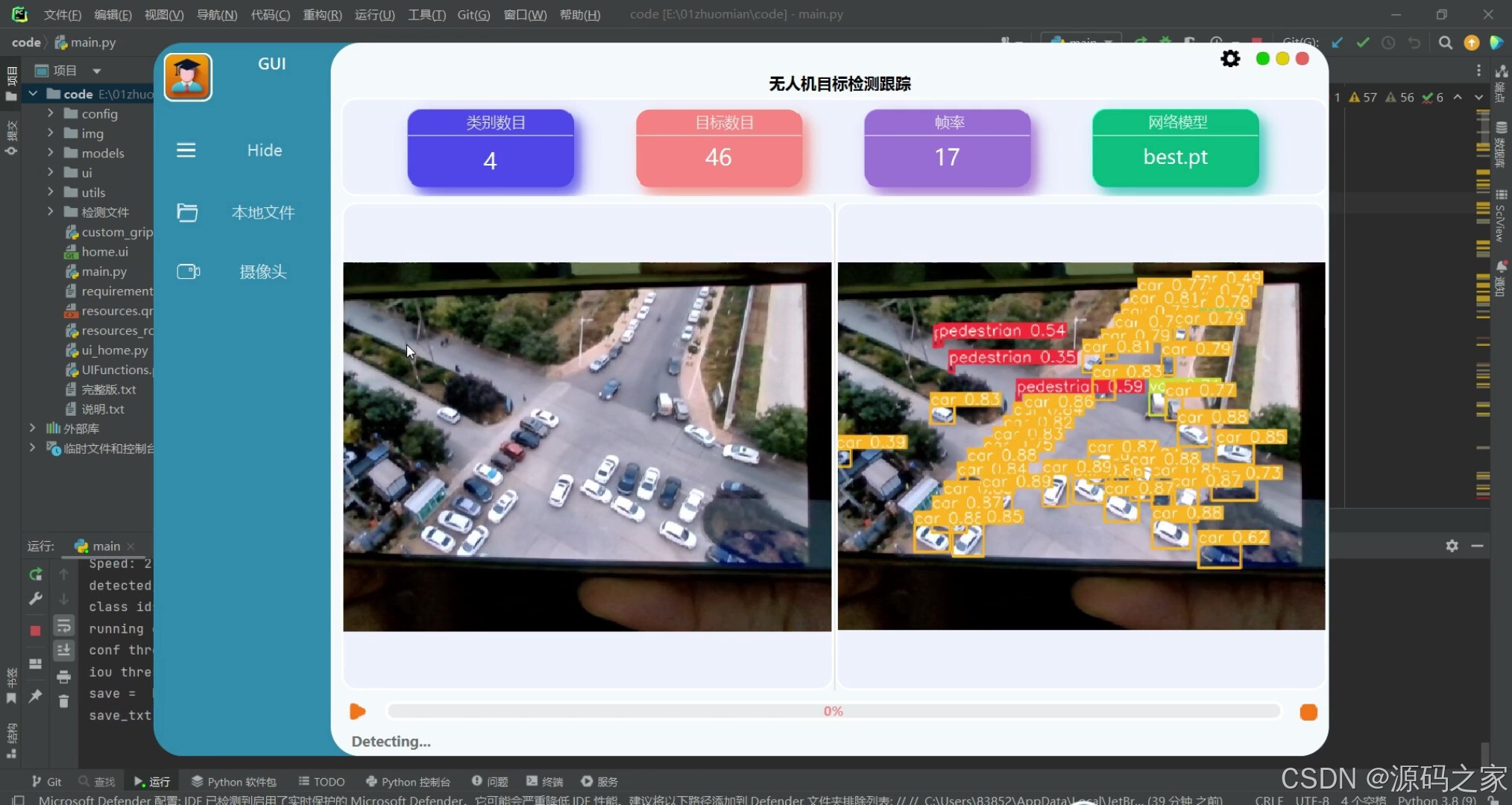
(3)无人机目标检测跟踪界面3
3、项目说明
技术栈:
Python语言、深度学习、PyTorch、YOLOv8、PySide界面设计、VisDrone数据集、无人机目标检测
YOLOv8无人机目标检测跟踪识别系统 深度学习 PySide界面设计 大数据 毕业设计
YOLOv8无人机目标检测跟踪识别系统
本项目聚焦于无人机目标检测领域,运用前沿技术打造一套高效精准的检测跟踪识别系统。技术上,以 Python 为基础语言,借助 PyTorch 深度学习框架,采用先进的 YOLOv8 算法模型,该模型在目标检测方面具有出色的性能与准确性,能快速识别无人机图像中的各类目标。
系统采用 PySide 进行界面设计,为用户提供简洁直观、操作便捷的交互体验。数据方面,选用 VisDrone 数据集,其丰富的场景和多样的目标类别,有效保障了模型的泛化能力。通过大数据训练,模型不断优化,提升检测精度与速度。
此系统可广泛应用于安防监控、交通管理、灾害救援等场景,为相关领域提供实时、准确的目标信息。作为毕业设计项目,它不仅综合运用了深度学习、界面设计等多方面知识,还具备较高的实用价值与创新性,有望为无人机目标检测领域的发展贡献一份力量。
4、核心代码
python
from ultralytics import YOLO
from PySide6.QtWidgets import QApplication, QMainWindow, QFileDialog, QMenu
from PySide6.QtGui import QImage, QPixmap, QColor
from PySide6.QtCore import QTimer, QThread, Signal, QObject, QPoint, Qt
from UIFunctions import *
from ui.home import Ui_MainWindow
#from utils.capnums import Camera
from utils.rtsp_win import Window
from collections import deque
import numpy as np
import time
import json
import sys
import cv2
import os
IMG_FORMATS = ('bmp', 'dng', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp', 'pfm') # image suffixes
VID_FORMATS = ('asf', 'avi', 'gif', 'm4v', 'mkv', 'mov', 'mp4', 'mpeg', 'mpg', 'ts', 'wmv', 'webm') # video suffixes
def is_video_file(path):
suffix = path.split('.')[-1].lower()
if suffix in IMG_FORMATS:
return False
elif suffix in VID_FORMATS:
return True
else:
print(f"Suffix '{suffix}' is invalid!")
raise ValueError("Invalid file suffix")
class YoloPredictor(QObject):
yolo2main_pre_img = Signal(np.ndarray) # raw image signal
yolo2main_res_img = Signal(np.ndarray) # test result signal
yolo2main_status_msg = Signal(str) # Detecting/pausing/stopping/testing complete/error reporting signal
yolo2main_fps = Signal(str) # fps
yolo2main_labels = Signal(dict) # Detected target results (number of each category)
yolo2main_progress = Signal(int) # Completeness
yolo2main_class_num = Signal(int) # Number of categories detected
yolo2main_target_num = Signal(int) # Targets detected
def __init__(self):
super().__init__()
# GUI args
self.used_model_name = None # The detection model name to use
self.source = '' # input source
self.stop_dtc = False # Termination detection
self.continue_dtc = True # pause
self.labels_dict = {} # return a dictionary of results
self.progress_value = 0 # progress bar
self.YoloConfig = dict()
self.YoloConfig['model'] = None
self.YoloConfig['iou'] = 0.70 # iou
self.YoloConfig['conf'] = 0.25 # conf
self.YoloConfig['rate'] = 30 # delay, ms
self.YoloConfig['save_res'] = False # Save test results
self.YoloConfig['save_txt'] = False # save label(txt) file
# Usable if setup is done
self.model = None
self.imgsz = None
self.device = None
self.dataset = None
self.vid_path, self.vid_writer = None, None
self.data_path = None
self.source_type = None
self.batch = None
self.fps_counter = 0
self.fps_frames = deque(maxlen=10) # 存储最近 10 帧的时间
self.fps = 0
def loadmodel(self):
if not self.model or self.used_model_name != self.YoloConfig['model']:
self.yolo2main_status_msg.emit('Loading Model...')
print('model used = ', self.YoloConfig['model'])
self.model = YOLO(self.YoloConfig['model'])
self.used_model_name = self.YoloConfig['model']
def run(self):
print("running detection ......")
# set model
self.loadmodel()
self.yolo2main_status_msg.emit('Detecting...')
print('conf threshold = ', self.YoloConfig['conf'])
print('iou threshold = ', self.YoloConfig['iou'])
print('save = ', self.YoloConfig['save_res'])
print('save_txt = ', self.YoloConfig['save_txt'])
if not is_video_file(self.source):
res = self.model.predict(self.source, save=self.YoloConfig['save_res'],
save_txt=self.YoloConfig['save_txt'], imgsz=640, conf=self.YoloConfig['conf'],
iou=self.YoloConfig['iou'], device='cpu')
preprocess_speed = res[0].speed['preprocess']
inference_speed = res[0].speed['inference']
postprocess_speed = res[0].speed['postprocess']
total_infer_speed = preprocess_speed + inference_speed + postprocess_speed
fps = 1000 / total_infer_speed
print("FPS:", fps)
detected_boxes = res[0].boxes
# print(res[0])
print("detected boxes ......")
# Create an empty list to store the class IDs
class_ids = []
# Iterate over each box and extract the class ID
for box in detected_boxes:
class_id = box.cls # get the class id
class_id_cpu = class_id.cpu() # move the value to CPU
class_id_int = int(class_id_cpu.item()) # convert to integer
class_ids.append(class_id_int) # append to the list
# Print the class ID
print("class ids = ", class_ids)
total_classes = len(set(class_ids))
total_ids = len(class_ids)
# Send test results
orig_img = res[0].orig_img
annotated_img = res[0].plot()
self.yolo2main_pre_img.emit(orig_img) # Before testing
self.yolo2main_res_img.emit(annotated_img) # after detection
# self.yolo2main_labels.emit(self.labels_dict) # webcam need to change the def write_results
self.yolo2main_class_num.emit(total_classes)
self.yolo2main_target_num.emit(total_ids)
self.yolo2main_fps.emit(str(int(fps)))
self.yolo2main_status_msg.emit('Detection completed')
else:
cap = cv2.VideoCapture(self.source)
# Loop through the video frames
count = 0 # run location frame
start_time = time.time() # used to calculate the frame rate
all_count = cap.get(cv2.CAP_PROP_FRAME_COUNT) # total frames
while cap.isOpened():
# Termination detection
if self.stop_dtc:
self.yolo2main_status_msg.emit('Detection terminated!')
self.stop_dtc = False
break
# Read a frame from the video
success, frame = cap.read()
count += 1 # frame count +1
self.progress_value = int(count / all_count * 1000) # progress bar(0~1000)
self.yolo2main_progress.emit(self.progress_value) # progress bar
if count % 5 == 0 and count >= 5: # Calculate the frame rate every 5 frames
self.yolo2main_fps.emit(str(int(5 / (time.time() - start_time))))
start_time = time.time()
if success:
# Run YOLOv8 inference on the frame
res = self.model.predict(frame, save=self.YoloConfig['save_res'], save_txt = self.YoloConfig['save_txt'], imgsz=640, conf=self.YoloConfig['conf'], iou=self.YoloConfig['iou'], device='cpu')
preprocess_speed = res[0].speed['preprocess']
inference_speed = res[0].speed['inference']
postprocess_speed = res[0].speed['postprocess']
total_infer_speed = preprocess_speed + inference_speed + postprocess_speed
fps = 1000 / total_infer_speed
print("FPS:", fps)
detected_boxes = res[0].boxes
print("detected boxes ......")
# Create an empty list to store the class IDs
class_ids = []
# Iterate over each box and extract the class ID
for box in detected_boxes:
class_id = box.cls # get the class id
class_id_cpu = class_id.cpu() # move the value to CPU
class_id_int = int(class_id_cpu.item()) # convert to integer
class_ids.append(class_id_int) # append to the list
# Print the class ID
print("class ids = ", class_ids)
total_classes = len(set(class_ids))
total_ids = len(class_ids)
# Send test results
orig_img = res[0].orig_img
annotated_img = res[0].plot()
self.yolo2main_pre_img.emit(orig_img) # Before testing
self.yolo2main_res_img.emit(annotated_img) # after detection
self.yolo2main_class_num.emit(total_classes)
self.yolo2main_target_num.emit(total_ids)
# if self.YoloConfig['rate'] != 0:
# time.sleep(self.YoloConfig['rate'] / 1000) # delay , ms
else:
# Break the loop if the end of the video is reached
self.yolo2main_status_msg.emit('Detection completed')
break
def run_camera(self, frame):
print("running camera detection ......")
# set model
self.loadmodel()
self.yolo2main_status_msg.emit('Detecting...')
print('conf threshold = ', self.YoloConfig['conf'])
print('iou threshold = ', self.YoloConfig['iou'])
print('save = ', self.YoloConfig['save_res'])
print('save_txt = ', self.YoloConfig['save_txt'])
res = self.model.predict(frame, save=self.YoloConfig['save_res'],
save_txt=self.YoloConfig['save_txt'], imgsz=640, conf=self.YoloConfig['conf'],
iou=self.YoloConfig['iou'], device='cpu')
preprocess_speed = res[0].speed['preprocess']
inference_speed = res[0].speed['inference']
postprocess_speed = res[0].speed['postprocess']
total_infer_speed = preprocess_speed + inference_speed + postprocess_speed
fps = 1000 / total_infer_speed
#print("FPS:", fps)
# 每读取一帧增加计数器
self.fps_counter += 1
# 如果达到 10 帧,则计算 FPS
if self.fps_counter == 10:
elapsed_time = self.fps_frames[-1] - self.fps_frames[0] # 计算最近 10 帧的时间差
average_fps = 10 / elapsed_time
self.fps = int(average_fps)
print("Average FPS:", self.fps)
self.fps_counter = 0 # 重置计数器
self.fps_frames.clear() # 清空时间队列
# 记录当前时间
self.fps_frames.append(time.time())
detected_boxes = res[0].boxes
# print(res[0])
print("detected boxes ......")
# Create an empty list to store the class IDs
class_ids = []
# Iterate over each box and extract the class ID
for box in detected_boxes:
class_id = box.cls # get the class id
class_id_cpu = class_id.cpu() # move the value to CPU
class_id_int = int(class_id_cpu.item()) # convert to integer
class_ids.append(class_id_int) # append to the list
# Print the class ID
print("class ids = ", class_ids)
total_classes = len(set(class_ids))
total_ids = len(class_ids)
# Send test results
orig_img = res[0].orig_img
annotated_img = res[0].plot()
self.yolo2main_pre_img.emit(orig_img) # Before testing
self.yolo2main_res_img.emit(annotated_img) # after detection
self.yolo2main_class_num.emit(total_classes)
self.yolo2main_target_num.emit(total_ids)
self.yolo2main_fps.emit(str(self.fps)) # FPS
def run_rtsp_frame(self, frame):
print("running rtsp/http stream detection ......")
print("stream source = ", self.source)
# set model
self.loadmodel()
self.yolo2main_status_msg.emit('Detecting...')
print('conf threshold = ', self.YoloConfig['conf'])
print('iou threshold = ', self.YoloConfig['iou'])
print('save = ', self.YoloConfig['save_res'])
print('save_txt = ', self.YoloConfig['save_txt'])
# Run YOLOv8 inference on the frame
res = self.model.predict(frame, save=self.YoloConfig['save_res'], save_txt = self.YoloConfig['save_txt'], imgsz=640, conf=self.YoloConfig['conf'], iou=self.YoloConfig['iou'], device='cpu')
preprocess_speed = res[0].speed['preprocess']
inference_speed = res[0].speed['inference']
postprocess_speed = res[0].speed['postprocess']
total_infer_speed = preprocess_speed + inference_speed + postprocess_speed
# 每读取一帧增加计数器
self.fps_counter += 1
# 如果达到 10 帧,则计算 FPS
if self.fps_counter == 10:
elapsed_time = self.fps_frames[-1] - self.fps_frames[0] # 计算最近 10 帧的时间差
average_fps = 10 / elapsed_time
self.fps = int(average_fps)
print("Average FPS:", self.fps)
self.fps_counter = 0 # 重置计数器
self.fps_frames.clear() # 清空时间队列
# 记录当前时间
self.fps_frames.append(time.time())
detected_boxes = res[0].boxes
print("detected boxes ......")
# Create an empty list to store the class IDs
class_ids = []
# Iterate over each box and extract the class ID
for box in detected_boxes:
class_id = box.cls # get the class id
class_id_cpu = class_id.cpu() # move the value to CPU
class_id_int = int(class_id_cpu.item()) # convert to integer
class_ids.append(class_id_int) # append to the list
# Print the class ID
print("class ids = ", class_ids)
total_classes = len(set(class_ids))
total_ids = len(class_ids)
# Send test results
orig_img = res[0].orig_img
annotated_img = res[0].plot()
self.yolo2main_pre_img.emit(orig_img) # Before testing
self.yolo2main_res_img.emit(annotated_img) # after detection
self.yolo2main_class_num.emit(total_classes)
self.yolo2main_target_num.emit(total_ids)
self.yolo2main_fps.emit(str(self.fps)) # FPS
class MainWindow(QMainWindow, Ui_MainWindow):
main2yolo_begin_sgl = Signal() # The main window sends an execution signal to the yolo instance
main2yolo_loadmodel_sgl = Signal() # The main window sends a load model signal to the yolo instance
def __init__(self, parent=None):
super(MainWindow, self).__init__(parent)
# basic interface
self.setupUi(self)
self.setAttribute(Qt.WA_TranslucentBackground) # rounded transparent
self.setWindowFlags(Qt.FramelessWindowHint) # Set window flag: hide window borders
UIFuncitons.uiDefinitions(self)
# Show module shadows
UIFuncitons.shadow_style(self, self.Class_QF, QColor(95, 95, 239))
UIFuncitons.shadow_style(self, self.Target_QF, QColor(251, 157, 139))
UIFuncitons.shadow_style(self, self.Fps_QF, QColor(170, 128, 213))
UIFuncitons.shadow_style(self, self.Model_QF, QColor(64, 186, 193))
# read model folder
self.pt_list = os.listdir('./models')
self.pt_list = [file for file in self.pt_list if file.endswith('.pt')]
self.pt_list.sort(key=lambda x: os.path.getsize('./models/' + x)) # sort by file size
self.model_box.clear()
self.model_box.addItems(self.pt_list)
self.Qtimer_ModelBox = QTimer(self) # Timer: Monitor model file changes every 2 seconds
self.Qtimer_ModelBox.timeout.connect(self.ModelBoxRefre)
self.Qtimer_ModelBox.start(2000)
# Yolo-v8 thread
self.yolo_predict = YoloPredictor() # Create a Yolo instance
self.select_model = self.model_box.currentText() # default model
self.yolo_predict.YoloConfig['model'] = "./models/%s" % self.select_model
self.yolo_thread = QThread() # Create yolo thread
self.yolo_predict.yolo2main_pre_img.connect(lambda x: self.show_image(x, self.pre_video))
self.yolo_predict.yolo2main_res_img.connect(lambda x: self.show_image(x, self.res_video))
self.yolo_predict.yolo2main_status_msg.connect(lambda x: self.show_status(x))
self.yolo_predict.yolo2main_fps.connect(lambda x: self.fps_label.setText(x))
self.yolo_predict.yolo2main_class_num.connect(lambda x:self.Class_num.setText(str(x)))
self.yolo_predict.yolo2main_target_num.connect(lambda x:self.Target_num.setText(str(x)))
self.yolo_predict.yolo2main_progress.connect(lambda x: self.progress_bar.setValue(x))
self.main2yolo_begin_sgl.connect(self.yolo_predict.run)
self.main2yolo_loadmodel_sgl.connect(self.yolo_predict.loadmodel)
self.yolo_predict.moveToThread(self.yolo_thread)
# Model parameters
self.model_box.currentTextChanged.connect(self.change_model)
self.iou_spinbox.valueChanged.connect(lambda x:self.change_val(x, 'iou_spinbox')) # iou box
self.iou_slider.valueChanged.connect(lambda x:self.change_val(x, 'iou_slider')) # iou scroll bar
self.conf_spinbox.valueChanged.connect(lambda x:self.change_val(x, 'conf_spinbox')) # conf box
self.conf_slider.valueChanged.connect(lambda x:self.change_val(x, 'conf_slider')) # conf scroll bar
self.speed_spinbox.valueChanged.connect(lambda x:self.change_val(x, 'speed_spinbox'))# speed box
self.speed_slider.valueChanged.connect(lambda x:self.change_val(x, 'speed_slider')) # speed scroll bar
# Prompt window initialization
self.Class_num.setText('--')
self.Target_num.setText('--')
self.fps_label.setText('--')
self.Model_name.setText(self.select_model)
# Select detection source
self.src_file_button.clicked.connect(self.open_src_file) # select local file
self.src_cam_button.clicked.connect(self.open_camera) #open_cam
# self.src_rtsp_button.clicked.connect(self.open_rtsp) #open_rtsp
# start testing button
self.run_button.clicked.connect(self.run_or_continue) # pause/start
self.stop_button.clicked.connect(self.stop) # termination
# Other function buttons
self.save_res_button.toggled.connect(self.is_save_res) # save image option
self.save_txt_button.toggled.connect(self.is_save_txt) # Save label option
self.ToggleBotton.clicked.connect(lambda: UIFuncitons.toggleMenu(self, True)) # left navigation button
self.settings_button.clicked.connect(lambda: UIFuncitons.settingBox(self, True)) # top right settings button
# initialization
self.load_config()
# The main window displays the original image and detection results
@staticmethod
def show_image(img_src, label):
try:
ih, iw, _ = img_src.shape
w = label.geometry().width()
h = label.geometry().height()
# keep the original data ratio
if iw/w > ih/h:
scal = w / iw
nw = w
nh = int(scal * ih)
img_src_ = cv2.resize(img_src, (nw, nh))
else:
scal = h / ih
nw = int(scal * iw)
nh = h
img_src_ = cv2.resize(img_src, (nw, nh))
frame = cv2.cvtColor(img_src_, cv2.COLOR_BGR2RGB)
img = QImage(frame.data, frame.shape[1], frame.shape[0], frame.shape[2] * frame.shape[1],
QImage.Format_RGB888)
label.setPixmap(QPixmap.fromImage(img))
except Exception as e:
print(repr(e))
# Control start/pause
def run_or_continue(self):
if self.yolo_predict.source == '':
self.show_status('Please select a image/video source before starting detection...')
self.run_button.setChecked(False)
else:
self.yolo_predict.stop_dtc = False
if self.run_button.isChecked():
self.run_button.setChecked(True) # start button
self.save_txt_button.setEnabled(False) # It is forbidden to check and save after starting the detection
self.save_res_button.setEnabled(False)
self.show_status('Detecting...')
self.yolo_predict.continue_dtc = True # Control whether Yolo is paused
if not self.yolo_thread.isRunning():
self.yolo_thread.start()
self.main2yolo_begin_sgl.emit()
else:
self.yolo_predict.continue_dtc = False
self.show_status("Pause...")
self.run_button.setChecked(False) # start button
# bottom status bar information
def show_status(self, msg):
self.status_bar.setText(msg)
if msg == 'Detection completed':
self.save_res_button.setEnabled(True)
self.save_txt_button.setEnabled(True)
self.run_button.setChecked(False)
self.progress_bar.setValue(0)
if self.yolo_thread.isRunning():
self.yolo_thread.quit() # end process
elif msg == 'Detection terminated!':
self.save_res_button.setEnabled(True)
self.save_txt_button.setEnabled(True)
self.run_button.setChecked(False)
self.progress_bar.setValue(0)
if self.yolo_thread.isRunning():
self.yolo_thread.quit() # end process
self.pre_video.clear() # clear image display
self.res_video.clear()
self.Class_num.setText('--')
self.Target_num.setText('--')
self.fps_label.setText('--')
# select local file
def open_src_file(self):
config_file = 'config/fold.json'
config = json.load(open(config_file, 'r', encoding='utf-8'))
open_fold = config['open_fold']
if not os.path.exists(open_fold):
open_fold = os.getcwd()
name, _ = QFileDialog.getOpenFileName(self, 'Video/image', open_fold, "Pic File(*.mp4 *.mkv *.avi *.flv *.jpg *.png)")
if name:
self.yolo_predict.source = name
self.show_status('Loaded File:{}'.format(os.path.basename(name)))
config['open_fold'] = os.path.dirname(name)
config_json = json.dumps(config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(config_json)
#self.stop()
def open_camera(self):
"""Initialize camera.
"""
print("open camera...")
self.capture = cv2.VideoCapture(0)
self.video_size = QSize(640, 480) # 设置视频帧的宽度和高度
self.capture.set(cv2.CAP_PROP_FRAME_WIDTH, self.video_size.width())
self.capture.set(cv2.CAP_PROP_FRAME_HEIGHT, self.video_size.height())
self.timer_cam = QTimer()
self.timer_cam.timeout.connect(self.predict_cam_stream)
if self.yolo_predict.YoloConfig['rate'] != 0:
self.timer_cam.start(self.yolo_predict.YoloConfig['rate'])
def predict_cam_stream(self):
"""Predict frame from camera
"""
_, frame = self.capture.read()
self.yolo_predict.run_camera(frame)
if self.yolo_predict.stop_dtc:
self.timer_cam.stop()
self.yolo_predict.yolo2main_status_msg.emit('Detection terminated!')
self.yolo_predict.stop_dtc = False
# select network source
def open_rtsp(self):
print("open rtsp/http ...")
self.rtsp_window = Window()
config_file = 'config/ip.json'
if not os.path.exists(config_file):
ip = "http://10.0.0.29:8554/test"
new_config = {"ip": ip}
new_json = json.dumps(new_config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(new_json)
else:
config = json.load(open(config_file, 'r', encoding='utf-8'))
ip = config['ip']
self.rtsp_window.rtspEdit.setText(ip)
self.rtsp_window.show()
self.rtsp_window.rtspButton.clicked.connect(lambda: self.load_rtsp(self.rtsp_window.rtspEdit.text()))
# load network sources
def load_rtsp(self, ip):
self.rtsp_window.close()
try:
self.yolo_predict.source = ip
new_config = {"ip": ip}
new_json = json.dumps(new_config, ensure_ascii=False, indent=2)
with open('config/ip.json', 'w', encoding='utf-8') as f:
f.write(new_json)
self.show_status('Loading stream:{}'.format(ip))
self.capture = cv2.VideoCapture(ip)
if not self.capture.isOpened():
print("failed to open stream source.")
else:
print("stream source opened.")
self.timer_rtsp = QTimer()
self.timer_rtsp.timeout.connect(self.predict_rtsp_stream)
if self.yolo_predict.YoloConfig['rate'] !=0:
self.timer_rtsp.start(self.yolo_predict.YoloConfig['rate'])
except Exception as e:
self.show_status('%s' % e)
def predict_rtsp_stream(self):
"""Read frame from rtsp/http stream.
"""
_, frame = self.capture.read()
self.yolo_predict.run_rtsp_frame(frame)
if self.yolo_predict.stop_dtc:
self.timer_rtsp.stop()
self.yolo_predict.yolo2main_status_msg.emit('Detection terminated!')
self.yolo_predict.stop_dtc = False
# Save test result button--picture/video
def is_save_res(self):
if self.save_res_button.checkState() == Qt.CheckState.Unchecked:
self.show_status('NOTE: Run image results are not saved.')
self.yolo_predict.YoloConfig['save_res'] = False
elif self.save_res_button.checkState() == Qt.CheckState.Checked:
self.show_status('NOTE: Run image results will be saved.')
self.yolo_predict.YoloConfig['save_res'] = True
# Save test result button -- label (txt)
def is_save_txt(self):
if self.save_txt_button.checkState() == Qt.CheckState.Unchecked:
self.show_status('NOTE: Labels results are not saved.')
self.yolo_predict.YoloConfig['save_txt'] = False
elif self.save_txt_button.checkState() == Qt.CheckState.Checked:
self.show_status('NOTE: Labels results will be saved.')
self.yolo_predict.YoloConfig['save_txt'] = True
# Configuration initialization ~~~wait to change~~~
def load_config(self):
config_file = 'config/setting.json'
if not os.path.exists(config_file):
iou = 0.70
conf = 0.25
rate = 30
save_res = 0
save_txt = 0
new_config = {"iou": iou,
"conf": conf,
"rate": rate,
"save_res": save_res,
"save_txt": save_txt
}
new_json = json.dumps(new_config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(new_json)
else:
config = json.load(open(config_file, 'r', encoding='utf-8'))
if len(config) != 5:
iou = 0.70
conf = 0.25
rate = 30
save_res = 0
save_txt = 0
else:
iou = config['iou']
conf = config['conf']
rate = config['rate']
save_res = config['save_res']
save_txt = config['save_txt']
self.yolo_predict.YoloConfig['iou'] = iou
self.yolo_predict.YoloConfig['conf'] = conf
self.yolo_predict.YoloConfig['rate'] = rate
self.iou_spinbox.setValue(iou)
self.conf_spinbox.setValue(conf)
self.speed_slider.setValue(rate)
self.save_res_button.setCheckState(Qt.CheckState(save_res))
self.yolo_predict.YoloConfig['save_res'] = (False if save_res==0 else True )
self.save_txt_button.setCheckState(Qt.CheckState(save_txt))
self.yolo_predict.YoloConfig['save_txt'] = (False if save_txt==0 else True )
self.run_button.setChecked(False)
self.show_status("Welcome~")
# Terminate button and associated state
def stop(self):
if self.yolo_thread.isRunning():
self.yolo_thread.quit() # end thread
self.yolo_predict.stop_dtc = True
self.run_button.setChecked(False) # start key recovery
self.save_res_button.setEnabled(True) # Ability to use the save button
self.save_txt_button.setEnabled(True) # Ability to use the save button
self.pre_video.clear() # clear image display
self.res_video.clear() # clear image display
self.progress_bar.setValue(0)
self.Class_num.setText('--')
self.Target_num.setText('--')
self.fps_label.setText('--')
# Change detection parameters
def change_val(self, x, flag):
if flag == 'iou_spinbox':
self.iou_slider.setValue(int(x*100)) # The box value changes, changing the slider
elif flag == 'iou_slider':
self.iou_spinbox.setValue(x/100) # The slider value changes, changing the box
self.show_status('IOU Threshold: %s' % str(x/100))
self.yolo_predict.YoloConfig['iou'] = x/100
elif flag == 'conf_spinbox':
self.conf_slider.setValue(int(x*100))
elif flag == 'conf_slider':
self.conf_spinbox.setValue(x/100)
self.show_status('Conf Threshold: %s' % str(x/100))
self.yolo_predict.YoloConfig['conf'] = x/100
elif flag == 'speed_spinbox':
self.speed_slider.setValue(x)
elif flag == 'speed_slider':
self.speed_spinbox.setValue(x)
self.show_status('Delay: %s ms' % str(x))
self.yolo_predict.YoloConfig['speed'] = x # ms
# change model
def change_model(self,x):
self.select_model = self.model_box.currentText()
self.yolo_predict.YoloConfig['model'] = "./models/%s" % self.select_model
self.show_status('Change Model:%s' % self.select_model)
self.Model_name.setText(self.select_model)
# load model signal emission
self.main2yolo_loadmodel_sgl.emit()
# Cycle monitoring model file changes
def ModelBoxRefre(self):
pt_list = os.listdir('./models')
pt_list = [file for file in pt_list if file.endswith('.pt')]
pt_list.sort(key=lambda x: os.path.getsize('./models/' + x))
# It must be sorted before comparing, otherwise the list will be refreshed all the time
if pt_list != self.pt_list:
self.pt_list = pt_list
self.model_box.clear()
self.model_box.addItems(self.pt_list)
# Get the mouse position (used to hold down the title bar and drag the window)
def mousePressEvent(self, event):
p = event.globalPosition()
globalPos = p.toPoint()
self.dragPos = globalPos
# Optimize the adjustment when dragging the bottom and right edges of the window size
def resizeEvent(self, event):
# Update Size Grips
UIFuncitons.resize_grips(self)
# Exit Exit thread, save settings
def closeEvent(self, event):
config_file = 'config/setting.json'
config = dict()
config['iou'] = self.iou_spinbox.value()
config['conf'] = self.conf_spinbox.value()
config['rate'] = self.speed_spinbox.value()
config['save_res'] = (0 if self.save_res_button.checkState()==Qt.Unchecked else 2)
config['save_txt'] = (0 if self.save_txt_button.checkState()==Qt.Unchecked else 2)
config_json = json.dumps(config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(config_json)
# Exit the process before closing
if self.yolo_thread.isRunning():
self.yolo_predict.stop_dtc = True
self.yolo_thread.quit()
MessageBox(
self.close_button, title='Note', text='Exiting, please wait...', time=3000, auto=True).exec()
sys.exit(0)
else:
sys.exit(0)
if __name__ == "__main__":
app = QApplication(sys.argv)
Home = MainWindow()
Home.show()
sys.exit(app.exec()) 🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目编程以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
5、源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看 👇🏻获取联系方式👇🏻