摘要
在过去十年中,无人驾驶飞行器(UAV,又称无人机)已广泛应用于各种农业领域,如作物管理、作物监测、播种和农药喷洒等。尽管如此,自主性仍然是物联网(IoT)无人机系统面临的关键限制,尤其是在作为喷雾无人机使用时,需要捕获和预处理数据以实现可靠的实时障碍物检测和避撞。此外,由于通用无人机与喷雾无人机在目标和操作上存在差异,并非所有障碍物检测和避撞方法都适用于喷雾无人机。鉴于此,本文旨在综述农业喷雾无人机避障场景相关的所有分支领域的最新进展,包括喷雾无人机的结构细节。同时,本文列举了当前喷雾无人机解决方案存在的主要开放性挑战,为未来研究人员制定新一代经济实惠的自主喷雾无人机解决方案路线图奠定基础。农业喷雾无人机需要数据密集型算法来处理获取的图像,且通常需要自主飞行领域的专业知识。本研究认为,由于动态的操作和负载条件,喷雾无人机仍面临障碍物检测方面的挑战。
概述
1.研究意义
随着物联网技术与无人机的融合,农业喷雾无人机逐渐取代人工喷洒,在提高效率、减少人力干预、降低成本等方面展现出巨大优势,但自主避障仍是其广泛应用的核心瓶颈。与通用无人机不同,农业喷雾无人机需兼顾喷雾覆盖范围、负载变化等特殊需求,现有避障方法难以直接适配。本文旨在系统梳理农业喷雾无人机避障相关技术进展,明确当前挑战,为后续研究提供参考。
2.核心研究内容
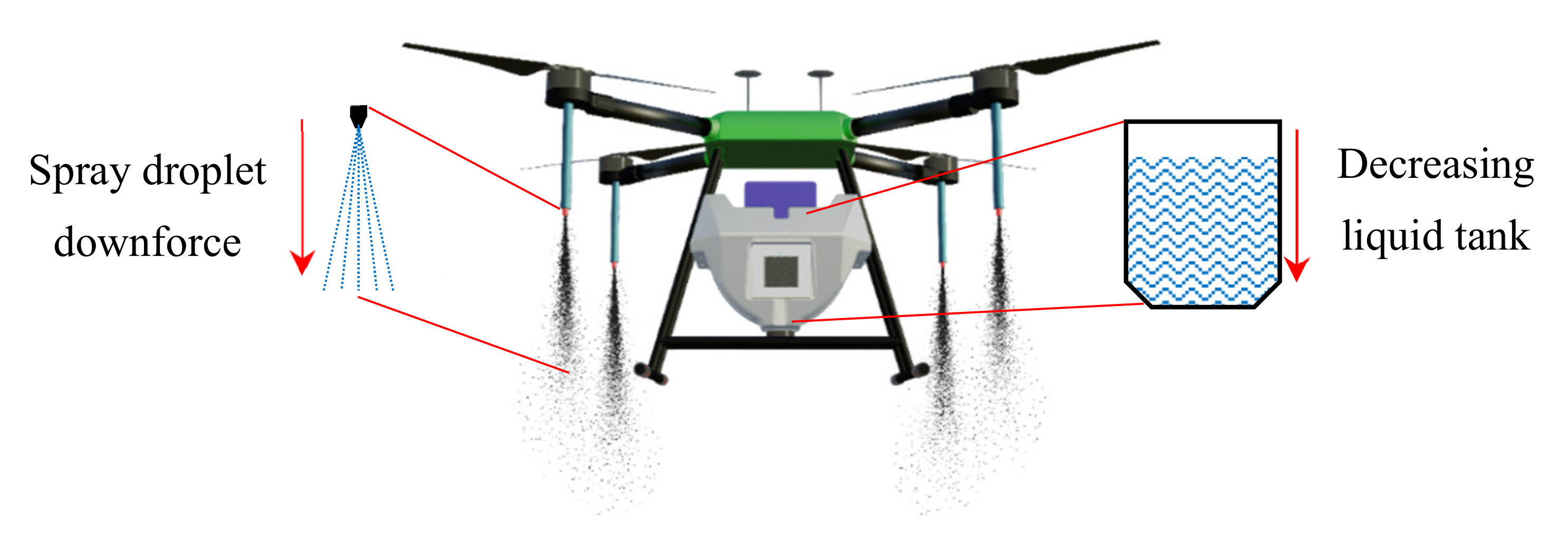
- 分析了农业喷雾无人机的操作约束,包括农田形状、天气条件、障碍物类型等外部因素,以及液体负载、电池容量、机身类型等自身因素。
- 详细阐述了农田障碍物的分类、特征及检测需求,涵盖固定障碍物(如房屋、电线杆)和移动障碍物(如鸟类、其他无人机)。
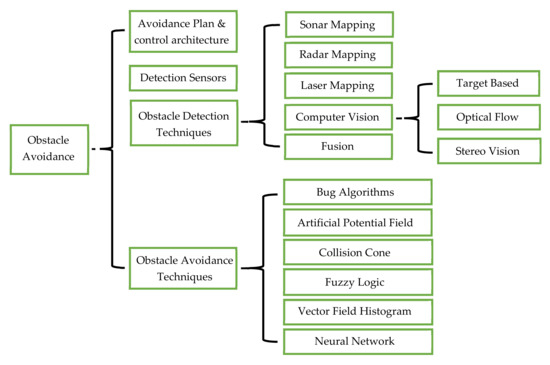
- 综述了避障相关关键技术,包括控制架构(反应式、 deliberative 规划式、混合式)、检测传感器(超声波、激光、雷达、视觉传感器等)、障碍物检测技术(声纳测绘、雷达测绘、激光测距、计算机视觉、多传感器融合)及避障算法(Bug 算法、人工势场法、碰撞锥法等)。
- 指出了当前技术面临的挑战,包括恶劣环境下的检测可靠性、算法计算成本、仿真与实际场景差异、传感器校准精度等问题。
3.主要结论
现有农业喷雾无人机避障技术在动态负载、复杂农田环境适配性方面仍存在不足,不同检测传感器和避障算法各有优劣,需根据实际应用场景合理选择。未来研究需聚焦低成本、高可靠性的传感器融合方案,优化适配喷雾无人机特性的避障算法,并缩小仿真与实际应用的差距。
一、相关技术方法总结
1.控制架构
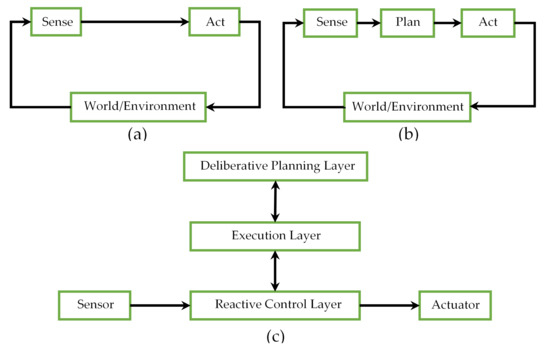
- 反应式控制架构:无人机按预设任务飞行,通过局部传感器实时感知障碍物并避障,响应速度快,但缺乏全局规划。
- deliberative 规划架构:先感知环境并更新地图模型,再生成最优无碰撞路径,规划精度高,但耗时较长,对定位数据要求高。
- 混合控制架构:结合前两者优势,通过 deliberative 层生成全局最优计划,反应式层执行实时避障,兼顾规划性与灵活性。
2.检测传感器
| 传感器类型 | 核心优势 | 主要局限 | 适用场景 |
|---|---|---|---|
| 超声波传感器 | 成本低、响应快 | 检测距离短(<10m)、易受声波干扰 | 近距离静态障碍物检测 |
| 激光 / 红外传感器 | 精度高、分辨率高 | 成本高、受强光和雾雨影响 | 中远距离高精度障碍物检测 |
| 毫米波雷达 | 不受天气和液体雾滴影响 | 横向视野窄(约 15 度)、成本中等 | 恶劣环境下的障碍物检测 |
| 视觉传感器(单目 / 双目) | 信息丰富、适配复杂场景 | 数据处理量大、依赖光照 | 障碍物识别与地形匹配 |
| 飞行时间(ToF)传感器 | 检测距离远(<250m)、可靠性高 | 成本高、受强光影响 | 中远距离障碍物测距 |
3.障碍物检测技术
- 声纳测绘:基于声波反射构建环境地图,适用于水下或低光照场景,在农业无人机中多用于近距离简单障碍物检测。
- 雷达测绘:通过无线电波测距,抗干扰能力强,可在雨雾等恶劣环境下工作,但计算复杂度高,需搭配信号处理算法。
- 激光测距(LiDAR):通过激光点云构建 3D 地图,检测精度极高,但成本高,易受粉尘、雾滴干扰。
- 计算机视觉:包括目标检测、光流法、立体视觉等,可实现障碍物识别与距离估算,数据处理成本高,需高性能处理器支持。
- 多传感器融合:结合不同传感器优势(如视觉传感器的识别能力与雷达的抗干扰性),提升复杂环境下的检测可靠性,是当前主流发展方向。
4.避障算法
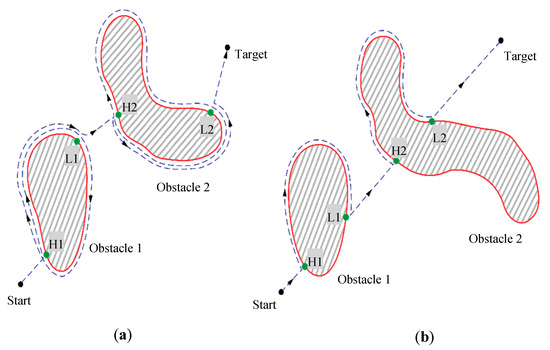
- Bug 算法:分为 Bug1 和 Bug2 等版本,通过沿障碍物边界移动实现避障,原理简单、适配单障碍物场景,但复杂环境下路径效率低。
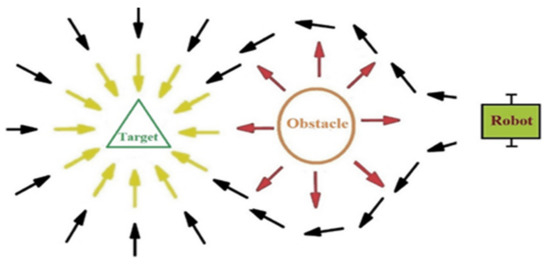
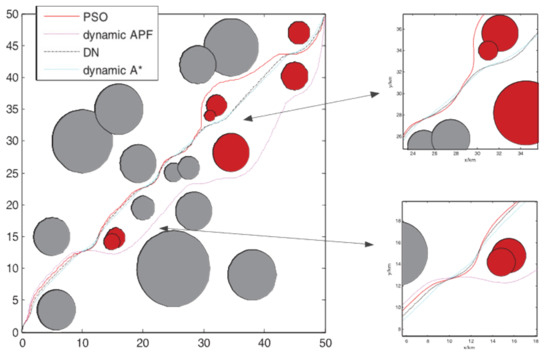
- 人工势场法(APF):将目标点设为 "引力场"、障碍物设为 "斥力场",无人机沿势场梯度移动,实时性好,但易陷入局部最小值。
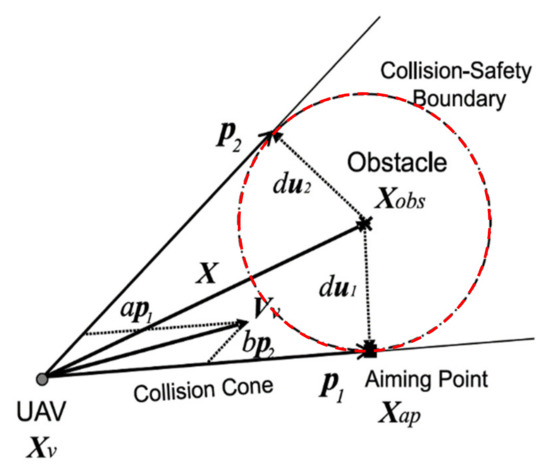
- 碰撞锥法:将障碍物视为圆形区域,通过计算无人机速度向量与障碍物的碰撞锥实现避障,适配不规则障碍物和动态环境,但需多传感器支持。
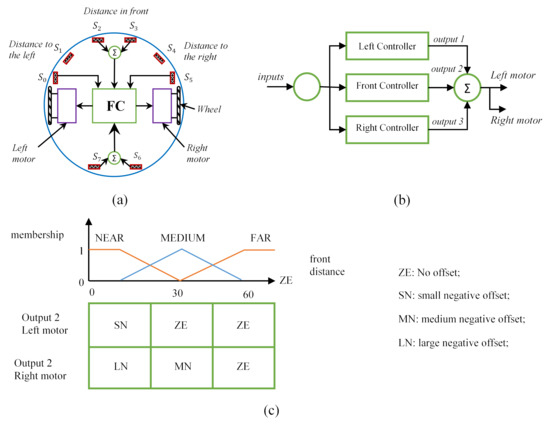
- 模糊逻辑算法:基于模糊规则融合多传感器数据,适配不确定性环境,无需精确数学模型,但规则制定依赖经验。
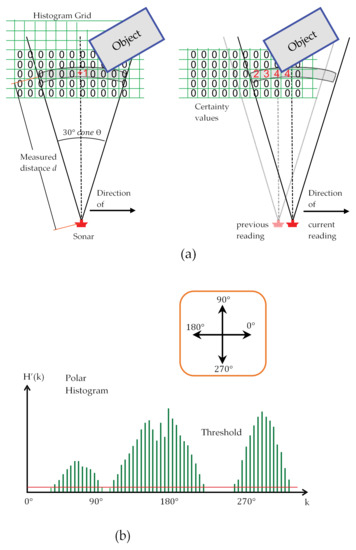
- 向量场直方图法(VFH):通过生成环境直方图选择低障碍物密度方向避障,实时性强,适用于动态环境,但忽略车辆动力学特性。
- 神经网络算法:通过大量数据训练实现障碍物识别与避障决策,适配复杂场景,实时性能好,但训练数据需求大,计算成本高。
二、检测传感器对比
1.核心参数与性能
| 传感器类型 | 检测范围 | 成本 | 精度 | 可靠性 | 核心优势 | 主要缺点 | 适用场景 |
|---|---|---|---|---|---|---|---|
| 超声波 | <10m | 低 | 短距离尚可 | 低 | 成本极低、响应快、无需光照 | 易受声波干扰、液体雾滴影响大 | 近距离静态障碍物辅助检测 |
| 激光 / 红外 | <50m | 中 | 极高 | 高 | 分辨率高、不受声音干扰 | 受强光 / 雾雨影响、成本中等 | 中距离高精度静态障碍物检测 |
| 结构化光 | <10m | 中 | 高 | 高 | 单点点测量可靠、环境适应性较强 | 检测距离短、受光照影响大 | 近距离精准定位障碍物 |
| ToF(飞行时间) | <250m | 高 | 中等 | 高 | 检测距离远、响应快 | 受强光影响、成本高 | 中长距离障碍物测距 |
| 毫米波雷达 | <100m | 中高 | 中等 | 中 | 不受天气 / 雾滴影响、抗干扰强 | 横向视野窄(约 15°)、分辨率一般 | 恶劣环境下动态障碍物检测 |
| 单目视觉 | <10m | 中 | 低 | 中 | 信息丰富、适配静态障碍物识别 | 需大量数据处理、依赖光照 | 低成本场景静态障碍物识别 |
| 双目视觉 | <10m | 高 | 中等 | 中 | 可生成深度信息、识别精度高 | 数据处理量大、受雾滴影响 | 复杂场景障碍物定位与识别 |
2.关键评价指标
- 环境适应性:毫米波雷达 > 激光传感器 > 超声波 > 视觉传感器(受光照 / 雾滴影响)
- 成本效益:超声波 > 单目视觉 > 激光 / 红外 > 结构化光 > 双目视觉 > ToF > 毫米波雷达
- 精度表现:激光 / 红外 > 结构化光 > 双目视觉 > 毫米波雷达 > ToF > 单目视觉 > 超声波
三、障碍物检测技术对比
1.技术类型与核心特性
| 检测技术 | 核心原理 | 性能表现 | 优点 | 缺点 | 依赖传感器 | 评价指标 |
|---|---|---|---|---|---|---|
| 声纳测绘 | 声波反射构建 2D/3D 地图 | 近距离精度中等,远距离衰减快 | 适配低光照 / 水下场景、成本低 | 易受噪声干扰、农业场景适配性差 | 超声波传感器 | 测距误差、地图分辨率、实时性 |
| 雷达测绘 | 无线电波测距与成像 | 恶劣环境下稳定,动态检测强 | 抗雨雾 / 强光、可检测移动障碍物 | 计算复杂度高、横向视野窄 | 毫米波雷达 | 探测距离、障碍物识别率、抗干扰性 |
| 激光测距(LiDAR) | 激光点云构建 3D 地图 | 精度极高(厘米级),实时性强 | 分辨率高、定位精准、不受声音干扰 | 成本高、易受粉尘 / 雾滴遮挡 | 激光传感器 | 点云密度、测距精度、环境鲁棒性 |
| 计算机视觉(目标检测) | 基于图像特征识别障碍物 | 静态识别率高,动态适配性一般 | 信息丰富、可识别障碍物类型 | 依赖光照、数据处理成本高 | 单目 / 双目相机 | 识别准确率、召回率、处理时延 |
| 计算机视觉(光流法) | 像素运动追踪障碍物 | 动态障碍物检测快,无需先验知识 | 适配未知环境、实时性好 | 静态障碍物检测差、易受纹理影响 | 单目相机 | 运动目标检测率、时延、误检率 |
| 计算机视觉(立体视觉) | 多视角图像生成深度信息 | 深度测量精准,识别能力强 | 可同时定位与识别、环境适配性较强 | 设备成本高、数据处理量大 | 双目相机 / RGB-D 相机 | 深度误差、障碍物定位精度、实时性 |
| 多传感器融合 | 融合不同传感器数据(如视觉 + 雷达) | 综合性能最优,鲁棒性强 | 互补优势、环境适应性广 | 系统复杂、校准要求高 | 多类型传感器组合 | 综合检测准确率、鲁棒性、系统复杂度 |
2.技术选型建议
- 低成本场景:声纳测绘 + 超声波传感器
- 高精度静态场景:激光测距 + 激光传感器
- 恶劣环境场景:雷达测绘 + 毫米波雷达
- 复杂动态场景:多传感器融合(视觉 + 雷达 + 激光)
四、避障算法对比
1.算法类型与适配场景
| 避障算法 | 核心逻辑 | 性能表现 | 优点 | 缺点 | 适配喷雾无人机特性 | 评价指标 |
|---|---|---|---|---|---|---|
| Bug 算法(Bug1/Bug2) | 沿障碍物边界移动避障 | 单障碍物避障可靠,多障碍物效率低 | 原理简单、无需复杂计算、易实现 | 路径冗余大、复杂环境易卡顿 | 适配旋翼机,可保证喷雾覆盖 | 避障成功率、路径长度、耗时 |
| 人工势场法(APF) | 引力场(目标)+ 斥力场(障碍物)引导路径 | 实时性好,路径平滑 | 计算量小、响应快、易集成 | 易陷入局部最小值、忽略障碍物形状 | 适配液体负载变化,路径调整灵活 | 路径平滑度、避障时延、局部最小值发生率 |
| 碰撞锥法 | 基于速度向量计算碰撞风险区域 | 动态环境适配性强,不规则障碍物兼容 | 可处理移动 / 变形障碍物、鲁棒性强 | 需多传感器支持、计算复杂度高 | 适配农田动态障碍物(如鸟类) | 碰撞规避率、路径调整幅度、实时性 |
| 模糊逻辑算法 | 模糊规则融合多传感器数据 | 不确定性环境下稳定,容错性强 | 无需精确数学模型、易调参 | 规则依赖经验、动态优化差 | 适配多传感器组合,成本可控 | 避障成功率、鲁棒性、参数敏感性 |
| 向量场直方图(VFH/VFH+) | 环境直方图选择低障碍物密度方向 | 实时性强,动态避障灵活 | 适配动态环境、路径规划高效 | 忽略车辆动力学、计算成本高 | 需高分辨率传感器(如 LiDAR) | 避障响应时间、路径优化度、障碍物识别适配性 |
| 神经网络算法 | 数据训练学习避障决策 | 复杂场景表现最优,实时性强 | 适配已知 / 未知障碍物、泛化能力强 | 需大量训练数据、训练成本高 | 多传感器数据输入 | 避障成功率、实时响应时间、数据依赖度 |
2.算法性能排名(农业场景)
- 神经网络算法:综合性能最优,适配复杂农田障碍物,但依赖数据
- 多算法融合(如 APF + 碰撞锥法):平衡实时性与鲁棒性,适配喷雾无人机动态负载
- 向量场直方图(VFH+):动态避障高效,需搭配 LiDAR 使用
- 碰撞锥法:动态障碍物适配性强,适合有移动障碍物(如鸟类)的场景
- 人工势场法:路径平滑,适合静态障碍物为主的农田
五、面临的挑战
1. 动态障碍物检测精度与实时性不足
- 问题表现:农田中鸟类、移动农机等动态障碍物运动轨迹不可预测,现有算法难以实现精准识别与实时跟踪,易导致避障不及时。
- 关键瓶颈:动态障碍物特征提取困难、传感器响应时延与算法决策时延叠加,尤其是喷雾雾滴会干扰视觉与激光传感器信号。
2. 仿真与实际农田场景脱节
- 问题表现:多数算法通过离线仿真训练,仿真环境中的障碍物类型、地形条件、负载状态与实际农田差异较大,导致算法实际应用效果不佳。
- 关键瓶颈:缺乏高保真、多样化的农田场景数据集,仿真模型难以模拟液体负载动态变化、喷雾雾滴干扰等真实工况。
3. 多传感器校准与数据融合精度不足
- 问题表现:多传感器在时空同步、数据精度匹配上存在误差,导致融合后的数据可靠性下降,影响避障决策准确性。
- 关键瓶颈:农田环境中温度、振动变化会加剧传感器漂移,现有校准方法难以适应动态工况,缺乏高效的在线校准技术。
4. 喷雾覆盖与避障的协同矛盾
- 问题表现:传统避障算法优先考虑飞行安全,避障过程中可能出现喷雾中断、重叠或遗漏,影响病虫害防治效果。
- 关键瓶颈:缺乏兼顾避障路径与喷雾覆盖的协同优化模型,难以平衡安全与作业效率。
5. 技术成本与农户适配性不匹配
- 问题表现:高精度传感器(激光雷达)和复杂算法依赖高性能硬件,导致无人机成本过高;同时,操作流程复杂,缺乏技术 expertise 的农户难以熟练使用。
- 关键瓶颈:低成本方案的性能短板的突破,以及简易化操作流程的设计。
6. 缺乏标准化流程与评价体系
- 问题表现:传感器选型、算法验证、作业流程缺乏统一标准,不同产品的避障性能难以横向对比,阻碍技术推广。
- 关键瓶颈:缺乏覆盖不同农田类型、障碍物场景的标准化测试数据集与性能评价指标(如避障成功率、喷雾覆盖率损失率)。