主机厂基于Simulink MBD新能源电动汽车主驱电驱控制器算法模型及开发资料,量产模型,量产软件,量产代码,软件架构设计,输入输出定子,单元测试,MIL测试资料。 (全套资料) Sumlink MCU电机控制策略 svpwm AUTOSAR 自动代码生成 c语言 ,ASIL C,适合INVA CANAPE标定,A2L文件。 按照ASPIC 开发流程开发,基于AUTOSAR架构开发,满足功能安全ASIL C。 永磁同步电机电机,PMSM。 超值资料
提到新能源电驱控制器的开发,绕不开Simulink MBD这一套组合拳。主机厂拿到手的量产模型和代码,背后藏着从算法设计到代码落地的完整链条。今天咱们就拿永磁同步电机(PMSM)的主驱控制器开刀,拆解那些藏在AUTOSAR架构下的硬核细节。
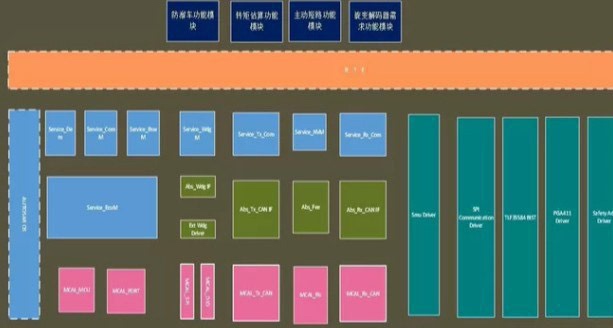
当Simulink遇到AUTOSAR
开发流程从ASPICE开始,意味着文档和需求追踪得严丝合缝。举个例子,模型里的Current Control模块,在Simulink里长这样:
matlab
function CurrentCtrl = CurrentControllerDesign(Ts, Ld, Lq, R)
% 离散化处理
CurrentCtrl.Kp = 2*pi*50*Ld;
CurrentCtrl.Ki = R*Ts;
% 抗饱和积分器实现
CurrentCtrl.Integrator = pid(Ki,0,0, Ts, 'IFormula','BackwardEuler');
end这可不是随便写的参数------Ld/Lq的取值直接关系到弱磁控制范围,而Ts的设定必须和AUTOSAR里配置的Task周期咬死。生成的C代码会带着ARXML的接口描述,比如电流指令输入挂在/IoHwAb/CurrentRef这个Port上,自动生成的代码里能看到清晰的Rte_Write调用。
SVPWM的代码实战
说到电机控制,SVPWM模块绝对是C代码里的重头戏。量产代码里常见这样的结构:
c
void Svpwm_Update(PMSM_Type *motor) {
// Clarke变换
alpha = motor->Ia;
beta = (motor->Ib + 2*motor->Ic)*INV_SQRT3;
// 扇区判断
sector = (beta > 0) ? 1 : 2;
sector += (alpha*SQRT3 > beta) ? 0 : 2;
sector += (-alpha*SQRT3 > beta + 2*alpha) ? 4 : 0;
// 占空比计算
switch(sector) {
case 1: /* 具体计算... */
//...省略6个扇区处理
}
PWM_UpdateDuty(TIM1, dutyU, dutyV, dutyW);
}这段代码有两个魔鬼细节:一是避免浮点运算(量产芯片可能不带FPU),二是要考虑死区补偿。实际标定时得用CANape抓取相电流波形,反复调整补偿值直到电流谐波降到2%以下。
功能安全的硬核操作
ASIL C等级不是闹着玩的,代码里必须埋监控钩子。比如电流采样的Plausibility Check:
c
#define CURRENT_MAX 500.0f // 单位A
ErrorType Current_Validate(float iU, float iV, float iW) {
if(fabs(iU) > CURRENT_MAX || fabs(iV) > CURRENT_MAX || fabs(iW) > CURRENT_MAX) {
Dem_SetEventStatus(DEM_CURRENT_OVERRANGE);
return E_NOT_OK;
}
// 三相平衡校验
if(fabs(iU + iV + iW) > 5.0f) {
Dem_SetEventStatus(DEM_CURRENT_BALANCE);
return E_NOT_OK;
}
return E_OK;
}这种检查必须放在ADC中断服务函数里,响应时间要压到50μs以内。更狠的是,有些厂会在FPGA里做硬件比较器,直接触发PWM关断。
标定那些事儿
A2L文件里的标定参数可不是摆设。比如弱磁控制的Kp参数,在INCA里看到的标定界面长这样:
text
/BaseSw/Controller/FieldWeakening/Kp
DataType: FLOAT32
CompuMethod: "0.0:100.0 lin"
Display: "%.1f Nm/A"
ECU_Address: 0x3024现场调参时,工程师一边盯着扭矩响应曲线,一边微调MAP里的数值。有个冷知识:标定工具实际是通过XCP协议在刷写数据,而A2L里的ECU_Address对应着生成的变量物理地址。
从模型到量产,这套开发流程就像搭乐高------AUTOSAR是底板,Simulink是积木块,ASIL C是质检员。真正值钱的是那些踩过坑的工程经验:比如如何平衡MIL测试覆盖率与开发周期,或者怎么在自动代码生成后手动优化中断响应时间。说到底,能落地的控制策略,都是算法与工程细节的肉搏战。
