聚类算法概述
- 划分式聚类:
-
- K-Means
- K-means++(K++means)
- [Bisecting K-means(Bi-means)](#Bisecting K-means(Bi-means))
- 基于密度的聚类:
-
- [DBSCAN(Density-Based Spatial Clustering of Applications with Noise)](#DBSCAN(Density-Based Spatial Clustering of Applications with Noise))
- [OPTICS(Ordering Points To Identify the Clustering Structure)](#OPTICS(Ordering Points To Identify the Clustering Structure))
- [层次聚类(Hierarchical Clustering)](#层次聚类(Hierarchical Clustering))
- 高斯混合模型(GMM)
-
- EM(Expectation‑Maximization)算法
- [高斯混合模型(Gaussian Mixture Model,GMM)](#高斯混合模型(Gaussian Mixture Model,GMM))
聚类是一种无监督学习方法,旨在将数据划分为具有相似特征的组(簇)。即聚类后同一类的数据尽可能聚集到一起,不同类数据尽量分离。以下是常见聚类算法及其核心思想和步骤:
划分式聚类:
K-Means
-
核心思想:通过最小化簇内平方误差(SSE)将数据划分为K个簇,每个簇由均值(质心)表示。
-
算法步骤
- 随机初始化K个质心。
- 将每个数据点分配到最近的质心所属簇。
- 重新计算每个簇的质心(均值)。
- 重复步骤2-3直到质心不再变化或达到最大迭代次数。
-
缺点
- 对初始中心点敏感
- 容易陷入局部最优
- 对k值敏感
K值的选择
- 肘部图:观察不同K值下聚类模型的误差平方和(SSE)变化趋势,寻找拐点作为最佳K值。误差平方和随K值增大而减小,拐点处下降幅度显著减缓,形如手肘。
S S E = ∑ i = 1 k ∑ x ∈ C i ∣ ∣ x − μ i ∣ ∣ 2 SSE = \sum_{i=1}^{k} \sum_{x \in C_i} ||x - \mu_i||^2 SSE=i=1∑kx∈Ci∑∣∣x−μi∣∣2
其中, C i C_{i} Ci为第 i i i类, μ i \mu_{i} μi为 C i C_{i} Ci的类中心
代码实现:
python3
from sklearn.cluster import KMeans
import matplotlib.pyplot as plt
sse = []
for k in range(1, 11):
kmeans = KMeans(n_clusters=k, random_state=42).fit(X)
sse.append(kmeans.inertia_)
plt.plot(range(1, 11), sse, marker='o')
plt.xlabel('K')
plt.ylabel('SSE')
plt.title('Elbow Method')
plt.show()- 轮廓系数:衡量样本与自身簇和其他簇的相似度,取值范围-1,1,值越大表示聚类效果越好。最佳K值对应轮廓系数峰值。
轮廓系数计算: s ( i ) = b ( i ) − a ( i ) max ( a ( i ) , b ( i ) ) s(i) = \frac{b(i) - a(i)}{\max\big(a(i), b(i)\big)} s(i)=max(a(i),b(i))b(i)−a(i)
其中, a ( i ) a(i) a(i) 是样本 i i i到其所属簇中其他样本的平均距离(反映簇的紧密性)。 b ( i ) b(i) b(i)是样本 i i i到最近的其他簇中样本的平均距离(反映簇间的分离性)。
K-means++(K++means)
核心思想 :优化初始中心点的选择,减少随机性带来的影响。通过加权概率避免初始中心点过于集中,提升聚类效果和收敛速度。
核心改进 :
初始中心点选择采用概率分布:第一个中心随机选取,后续中心点选择时,距离已选中心越远的点被选中的概率越高。
若已有中心点集合 C C C,新中心点 x x x的选择概率为:
P ( x ) = D ( x ) 2 ∑ x i ∈ X D ( x i ) 2 P(x) = \frac{D(x)^{2}}{\sum_{x_{i}\in X} D(x_{i})^{2}} P(x)=∑xi∈XD(xi)2D(x)2
其中 D ( x ) D(x) D(x) 是 x x x到最近中心点的距离。
Bisecting K-means(Bi-means)
核心思想:采用自上而下的二分策略:每次选择一个现有簇进行二分(使用K-means),直到达到预设的簇数 ( K )。选择分裂的簇时,通常选取误差平方和(SSE)最大的簇。
算法步骤:
- 将所有点视为一个簇
- 当簇的个数小于预设值K时
- 对每个簇
- 计算总SSE
- 在给定的簇上进行k-means聚类(k=2)
- 计算聚类后的两个簇的SSE总和
- 选择使SSE最小的簇进行划分(或者是能带来最大SSE降低的簇进行划分,类似于选择增益最大的簇进行划分)
优势:
- 更适合处理层次化结构的数据,如文档聚类。
- 相比传统K-means,对初始中心的依赖性更低。
基于密度的聚类:
DBSCAN(Density-Based Spatial Clustering of Applications with Noise)
核心思想:基于密度划分簇,能够发现任意形状的簇并识别噪声点。
算法步骤
- 定义邻域参数( ε \varepsilon ε半径和最小点数 M M M)。
- 从核心点(邻域内点数≥ M M M)出发,扩展形成簇。
- 将密度可达的点归入同一簇,未被归类的点标记为噪声。
密度可达的含义:核心点邻域中的点,如果也满足其邻域内点数 ≥ M \ge M ≥M,则也是核心点。如果不是核心点,但在核心点的邻域内则称为边界点,否则为噪声
优点:不需要提前设置聚类的个数;对噪声不敏感
缺点 :需要提前确定 ε \varepsilon ε-半径和最小点数 M M M;对初值选取敏感; 对密度不均的数据聚合效果不好
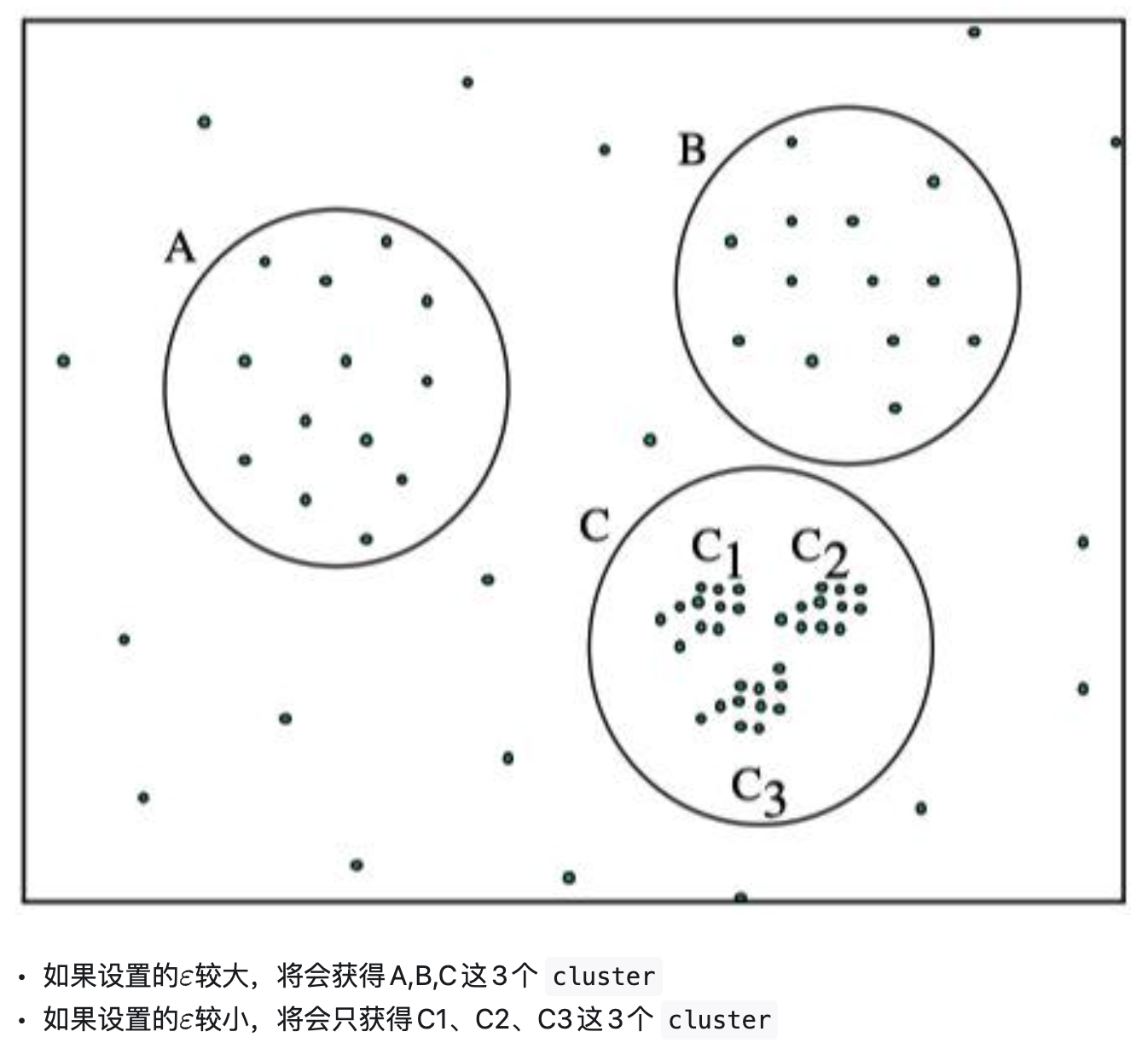
DBSCAN中使用了统一的 ε \varepsilon ε值,当数据密度不均匀的时候
- 较小的 ε \varepsilon ε值,则较稀疏的cluster中的节点密度会小于 M M M,会被认为是边界点而不被用于进一步的扩展;
- 较大的 ε \varepsilon ε值,则密度较大且离的比较近的cluster容易被划分为同一个cluster,如下图所示。
因此考虑合适的 ε \varepsilon ε值,即OPRTICS,解决对输入参数敏感的问题。即选取有限个邻域参数进行聚类,这样就能得到不同邻域参数下的聚类结果。
OPTICS(Ordering Points To Identify the Clustering Structure)
前提知识:
核心距离(Core Distance) :
对于给定对象 p p p 和邻域半径 ε \varepsilon ε,核心距离是使得 p 成为核心点的最小距离。数学表示为:
C D ( p , ε ) = m i n { r ∣ r ≤ ε , ∣ N r ( p ) ∣ ≥ M i n P t s } CD(p, \varepsilon) = min\{r | r ≤ ε, |N_r(p)| ≥ MinPts\} CD(p,ε)=min{r∣r≤ε,∣Nr(p)∣≥MinPts}其中: N r ( p ) N_{r}(p) Nr(p) 表示以 p p p 为中心、半径为 r r r 的邻域内包含的点的集合。MinPts 是预设的最小邻居数量阈值。若 ∣ N ε ( p ) ∣ < M i n P t s |N_{\varepsilon}(p)| < MinPts ∣Nε(p)∣<MinPts,则 p p p 非核心点,核心距离为未定义( ∞ \infty ∞)。
可达距离(Reachability Distance)对象 q q q 关于核心点 p p p 的可达距离定义为:
R D ( p , q , ε ) = m a x ( C D ( p , ε ) , d ( p , q ) ) RD(p, q, ε) = max(CD(p, ε), d(p, q)) RD(p,q,ε)=max(CD(p,ε),d(p,q))其中: d ( p , q ) d(p, q) d(p,q)是 p p p 与 q q q 的直接距离(如欧氏距离)。若 p p p 非核心点,可达距离无意义( ∞ \infty ∞)。
性质:
- 可达距离 ≥ \ge ≥核心距离。
- 通过可达距离可构建可达性图(Reachability Plot),直观展示簇结构。
- 算法通过优先队列处理对象的可达距离,生成有序的输出序列。
核心思想 :改进DBSCAN,通过可达距离排序处理多密度簇。
算法步骤
- 计算每个点的核心距离和可达距离。
- 按可达距离生成排序列表。
- 基于排序列表和阈值提取簇结构。
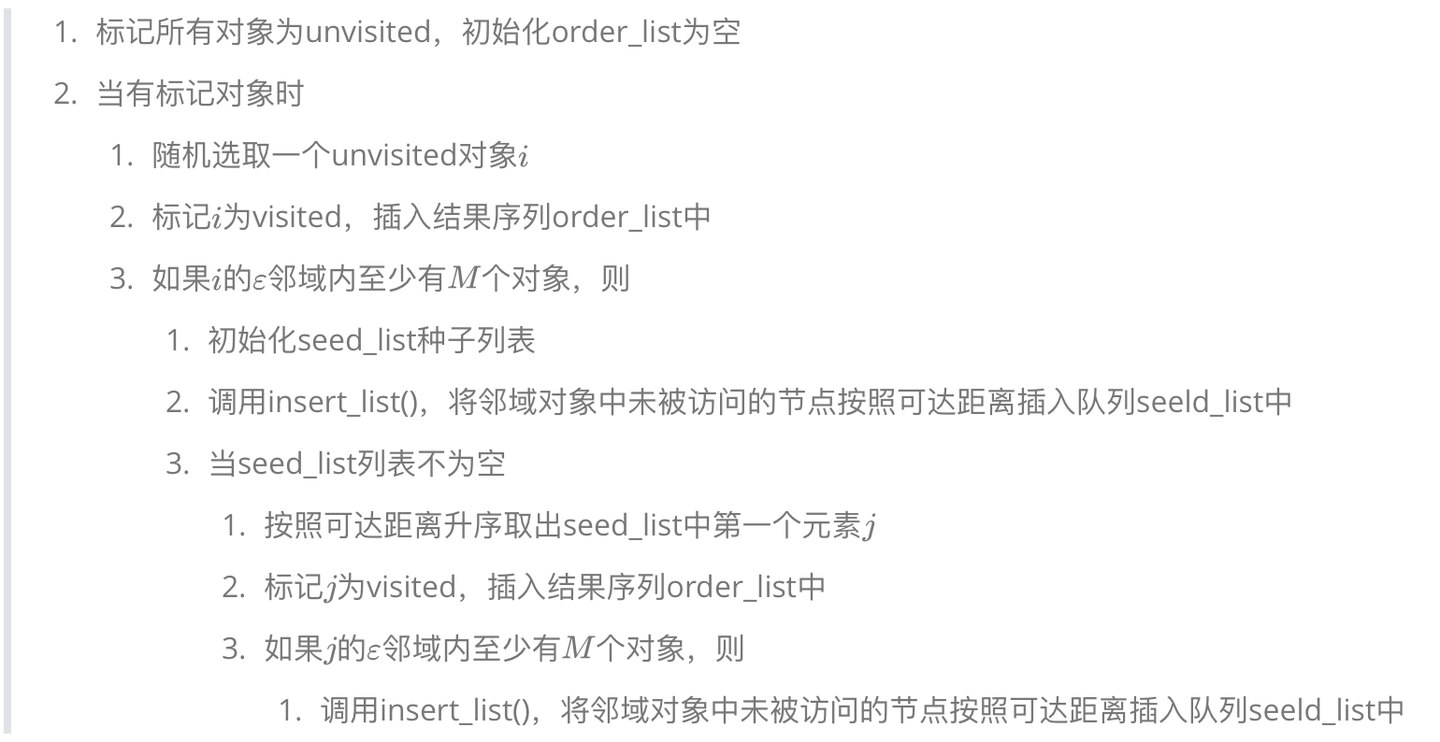
具体:
- 初始化:所有对象标记为未处理,创建空的有序列表和优先队列(按可达距离排序)。
- 处理对象
- 从未处理对象中选择一个种子点 p p p,计算其核心距离。若未定义,跳过;否则获取其 ϵ \epsilon ϵ-邻域。
- 将 p p p加入有序列表,并计算邻域内每个点 q q q的可达距离,更新优先队列。
- 扩展聚类:从优先队列中提取可达距离最小的 q q q,重复上述步骤,直到队列为空。
- 生成可达距离图:输出有序列表及对应的可达距离,通过可视化或阈值提取聚类。(按照密度不同将相近密度的点聚合在一起,而不是输出该点所属的具体类别)
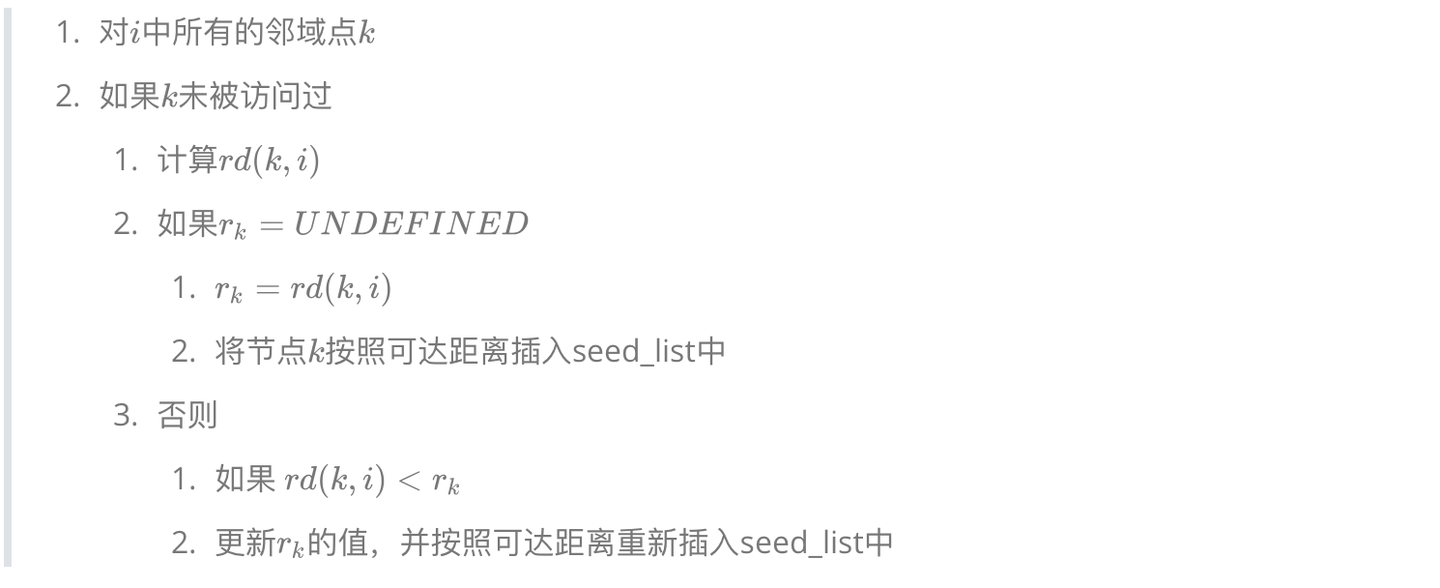
insert_list()函数定义如下:
层次聚类(Hierarchical Clustering)
核心思想:通过树状结构(树状图)逐步合并或分裂簇,分为凝聚式(自底向上)和分裂式(自顶向下)。
算法步骤(凝聚式)
- 将每个数据点视为单独簇。
- 计算簇间距离(如单链接、全链接、平均链接)。
- 合并距离最近的两个簇。
- 重复步骤2-3直到所有点聚为一个簇或达到终止条件。
常用距离定义
| 距离名称 | 定义 | 数学表达式(二维空间) | 适用场景 |
|---|---|---|---|
| 欧氏距离 | 两点间的直线距离 | d = ( x 2 − x 1 ) 2 + ( y 2 − y 1 ) 2 d = \sqrt{(x₂ - x₁)² + (y₂ - y₁)²} d=(x2−x1)2+(y2−y1)2 | 几何空间、聚类分析 |
| 曼哈顿距离 | 两点在坐标轴上的绝对距离之和 | d = ∣ x 2 − x 1 ∣ + ∣ y 2 − y 1 ∣ d= \vert x_{2} - x_{1} \vert +\vert y_{2} - y_{1} \vert d=∣x2−x1∣+∣y2−y1∣ | 网格路径规划、图像处理 |
| 切比雪夫距离 | 两点各维度坐标差的最大值 | d = m a x ( ∣ x 2 − x 1 ∣ , ∣ y 2 − y 1 ∣ ) d=max( \vert x_{2} - x_{1} \vert, \vert y_{2} - y_{1} \vert) d=max(∣x2−x1∣,∣y2−y1∣) | 棋盘移动、像素分析 |
| 闵可夫斯基距离 | 欧氏和曼哈顿距离的广义形式(p为参数) | d = ( ∣ x 2 − x 1 ∣ p + ∣ y 2 − y 1 ∣ p ) 1 / p d= \big(\vert x_{2} - x_{1} \vert ^{p}+\vert y_{2} - y_{1} \vert^{p}\big)^{1/p} d=(∣x2−x1∣p+∣y2−y1∣p)1/p | 灵活调整距离度量(p=1:曼哈顿;p=2:欧氏) |
| 余弦相似度 | 通过向量夹角余弦值衡量方向相似性(非严格距离) | c o s θ = x 1 x 2 + y 1 y 2 ( x 1 2 + y 1 2 ) ∗ ( x 2 2 + y 2 2 ) cos\theta =\frac{x_{1}x_{2}+y_{1}y_{2}}{\sqrt{(x_{1}^{2}+y_{1}^{2})}*\sqrt{(x_{2}^{2}+y_{2}^{2})}} cosθ=(x12+y12) ∗(x22+y22) x1x2+y1y2 | 文本分类、推荐系统 |
| 马氏距离 | 考虑数据协方差结构的标准化距离 | d = ( ( x 2 − x 1 ) T Σ − 1 ( x 2 − x 1 ) ) d = \sqrt{((x₂ - x₁)ᵀΣ⁻¹(x₂ - x₁))} d=((x2−x1)TΣ−1(x2−x1)) ( Σ Σ Σ为协方差矩阵) | 多元统计、异常检测 |
| 汉明距离 | 两个等长字符串在相同位置不同字符的数量 | d = Σ δ ( x i ≠ y i ) d = Σδ(xᵢ ≠ yᵢ) d=Σδ(xi=yi)( δ δ δ为指示函数) | 编码理论、DNA序列比对 |
| 杰卡德距离 | 1减去杰卡德相似系数(集合差异度量) | d = 1 − ∣ A ∩ B ∣ ∣ A ∪ B ∣ d=1-\frac{\vert A\cap B\vert }{\vert A\cup B\vert} d=1−∣A∪B∣∣A∩B∣ | 集合相似度、推荐系统 |
- 闵可夫斯基距离 是通用形式,通过调整参数
p可衍生其他距离。 - 余弦相似度 通常用于方向相似性,需转换为
1 - cosθ作为距离度量。 - 马氏距离对数据分布敏感,适用于非独立同分布数据。
簇间距离计算方法比较
以下表格总结了单链接、全链接、平均链接三种常见的簇间距离计算方法,包括计算公式、优缺点及适用场景:
| 方法 | 计算公式 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|---|
| 单链接 | D ( A , B ) = min a ∈ A , b ∈ B d ( a , b ) D(A,B) = \min_{a \in A, b \in B} d(a,b) D(A,B)=mina∈A,b∈Bd(a,b) | 能发现非球形簇;对噪声敏感度低 | 易形成链式簇(Chaining Effect) | 细长或不规则形状的簇 |
| 全链接 | D ( A , B ) = max a ∈ A , b ∈ B d ( a , b ) D(A,B) = \max_{a \in A, b \in B} d(a,b) D(A,B)=maxa∈A,b∈Bd(a,b) | 生成的簇更紧凑,避免链式效应 | 对噪声和离群点敏感 | 球形或紧凑簇 |
| 平均链接 | D ( A , B ) = 1 ∣ A ∣ ∗ ∣ B ∣ ∑ a ∈ A ∑ b ∈ B d ( a , b ) D(A,B) = \frac{1}{\vert A\vert* \vert B\vert} \sum_{a \in A} \sum_{b \in B} d(a,b) D(A,B)=∣A∣∗∣B∣1∑a∈A∑b∈Bd(a,b) | 平衡单链接和全链接的特性 | 计算复杂度较高 | 通用场景,尤其是中等规模数据集 |
高斯混合模型(GMM)
核心思想:假设数据由多个高斯分布混合生成,通过EM算法估计参数。
算法步骤
- 初始化高斯分布的参数(均值、协方差、权重)。
- E步:计算每个点属于各高斯分布的后验概率。
- M步:更新高斯分布的参数以最大化似然函数。
- 重复E-M步骤直到收敛。
EM(Expectation‑Maximization)算法
-
问题背景
在许多无监督学习任务中,模型的 完整数据 包含可观测变量 (X) 与 隐变量 (Z)。直接对观测数据求极大似然往往难以解析,因为似然函数涉及对隐变量的积分或求和。
-
算法框架
EM 通过交替进行两步迭代来间接优化参数 (\theta):
- E 步(Expectation) :在当前参数 θ ( t ) \theta^{(t)} θ(t) 下,计算隐变量的后验分布 p ( Z ∣ X , θ ( t ) ) p(Z|X,\theta^{(t)}) p(Z∣X,θ(t)),并求出 对数似然的条件期望
Q ( θ ∣ θ ( t ) ) = E Z ∣ X , θ ( t ) log p ( X , Z ∣ θ ) . Q(\theta|\theta^{(t)}) = \mathbb{E}_{Z\mid X,\theta^{(t)}}\!\big\\log p(X,Z\|\\theta)\\big. Q(θ∣θ(t))=EZ∣X,θ(t)logp(X,Z∣θ). - M 步(Maximization) :最大化上式得到新的参数
θ ( t + 1 ) = arg max θ Q ( θ ∣ θ ( t ) ) . \theta^{(t+1)} = \arg\max_{\theta} Q(\theta|\theta^{(t)}). θ(t+1)=argθmaxQ(θ∣θ(t)).
迭代过程保证对数似然单调不减,最终收敛到局部极大值。
- E 步(Expectation) :在当前参数 θ ( t ) \theta^{(t)} θ(t) 下,计算隐变量的后验分布 p ( Z ∣ X , θ ( t ) ) p(Z|X,\theta^{(t)}) p(Z∣X,θ(t)),并求出 对数似然的条件期望
-
适用范围
- 参数中出现 缺失/隐变量(如聚类标签、混合模型的成分指示、隐马尔可夫模型的状态序列)。
- 需要 极大似然估计 或 最大后验估计 的生成模型。
高斯混合模型(Gaussian Mixture Model,GMM)
-
模型假设
GMM 认为观测数据由 K K K 个多元正态分布 的线性混合生成:
p ( x ) = ∑ k = 1 K π k N ( x ∣ μ k , Σ k ) , p(x)=\sum_{k=1}^{K}\pi_k\;\mathcal{N}(x|\mu_k,\Sigma_k), p(x)=k=1∑KπkN(x∣μk,Σk),其中 π k \pi_k πk 为混合权重(满足 ∑ k π k = 1 \sum_k\pi_k=1 ∑kπk=1, μ k , Σ k \mu_k,\Sigma_k μk,Σk 分别是第 (k) 个高斯分量的均值向量和协方差矩阵。
-
参数估计
由于每个样本的 分量指示变量(即它属于哪一个高斯)是不可观测的,GMM 的参数估计天然适用 EM:
- E 步 :计算每个样本属于第 k k k 个分量的后验概率(软分配)
γ i k = p ( z i = k ∣ x i , θ ( t ) ) = π k ( t ) N ( x i ∣ μ k ( t ) , Σ k ( t ) ) ∑ j = 1 K π j ( t ) N ( x i ∣ μ j ( t ) , Σ j ( t ) ) . \gamma_{ik}=p(z_i=k|x_i,\theta^{(t)})= \frac{\pi_k^{(t)}\mathcal{N}(x_i|\mu_k^{(t)},\Sigma_k^{(t)})} {\sum_{j=1}^{K}\pi_j^{(t)}\mathcal{N}(x_i|\mu_j^{(t)},\Sigma_j^{(t)})}. γik=p(zi=k∣xi,θ(t))=∑j=1Kπj(t)N(xi∣μj(t),Σj(t))πk(t)N(xi∣μk(t),Σk(t)). - M 步 :依据软分配更新参数
π k ( t + 1 ) = 1 N ∑ i γ i k , μ k ( t + 1 ) = ∑ i γ i k x i ∑ i γ i k , Σ k ( t + 1 ) = ∑ i γ i k ( x i − μ k ( t + 1 ) ) ( x i − μ k ( t + 1 ) ) ⊤ ∑ i γ i k . \pi_k^{(t+1)}=\frac{1}{N}\sum_i\gamma_{ik},\quad \mu_k^{(t+1)}=\frac{\sum_i\gamma_{ik}x_i}{\sum_i\gamma_{ik}},\quad \Sigma_k^{(t+1)}=\frac{\sum_i\gamma_{ik}(x_i-\mu_k^{(t+1)})(x_i-\mu_k^{(t+1)})^\top}{\sum_i\gamma_{ik}}. πk(t+1)=N1i∑γik,μk(t+1)=∑iγik∑iγikxi,Σk(t+1)=∑iγik∑iγik(xi−μk(t+1))(xi−μk(t+1))⊤.
迭代直至对数似然收敛。
- E 步 :计算每个样本属于第 k k k 个分量的后验概率(软分配)
-
软聚类特性
与硬聚类(如 K‑Means)不同,GMM 为每个样本提供 属于每个簇的概率 ,能够处理 非球形、椭圆形 的簇结构,适用于 高维、复杂分布 的数据。
适用场景 :
| 场景 | 典型算法 | 说明 |
|---|---|---|
| 聚类 | GMM + EM | 需要捕捉簇的形状、大小不等或有重叠的情况(如图像分割、用户行为分群)\[5] |
| 密度估计 | GMM | 用于生成式模型、异常检测、概率预测等 |
| 隐马尔可夫模型(HMM)参数学习 | EM(Baum‑Welch) | 隐状态不可观测,使用 EM 迭代估计转移/发射概率\[6] |
| 混合朴素贝叶斯、因子分析等生成模型 | EM | 同样属于"隐变量"框架,EM 为通用求解器\[7] |
| 文本主题模型(LDA) | 变分 EM / 采样 EM | 隐主题是未标记的变量,使用 EM 近似求解 |
优点:
- 通用性强:只要模型可以写出完整数据的似然,就能套用 EM;对混合模型、隐马尔可夫模型、因子分析等均适用。
- 软分配:在 GMM 中提供每个样本的概率归属,能够表达不确定性,提升聚类质量。
- 单调收敛:每一步对数似然必不下降,保证算法的数值稳定性。
- 理论支撑:基于 Jensen 不等式的推导,使其在统计学上有严谨的证明
缺点与局限:
- 局部最优 :EM 只保证收敛到 局部极大值,对多峰似然函数极易陷入次优解,需要多次随机初始化或使用模型选择技巧来缓解\[12]。
- 计算成本 :每次迭代都要计算所有样本对所有混合分量的后验概率,时间复杂度为 (O(NK D^2))((D) 为特征维度),在大规模或高维数据上会显得昂贵\[13]。
- 对初始值敏感 :不同的初始均值、协方差或混合权重会导致截然不同的收敛结果,实际使用时常配合 K‑Means 或 层次聚类 进行预初始化
- 模型选择困难 :需要手动指定混合分量数 K K K;若选错会导致欠拟合或过拟合。常用 BIC/AIC 、交叉验证或 非参数贝叶斯(如 Dirichlet Process GMM)来辅助选择
- 对噪声/离群点敏感 :异常点会显著影响均值和协方差的估计,导致聚类质量下降;可通过 对角协方差 、稀疏协方差 或 鲁棒混合模型 进行改进
ref:常用聚类算法
mita大模型生成