

重要信息
时间:2025年12月19-21日
地点:中国 · 广州
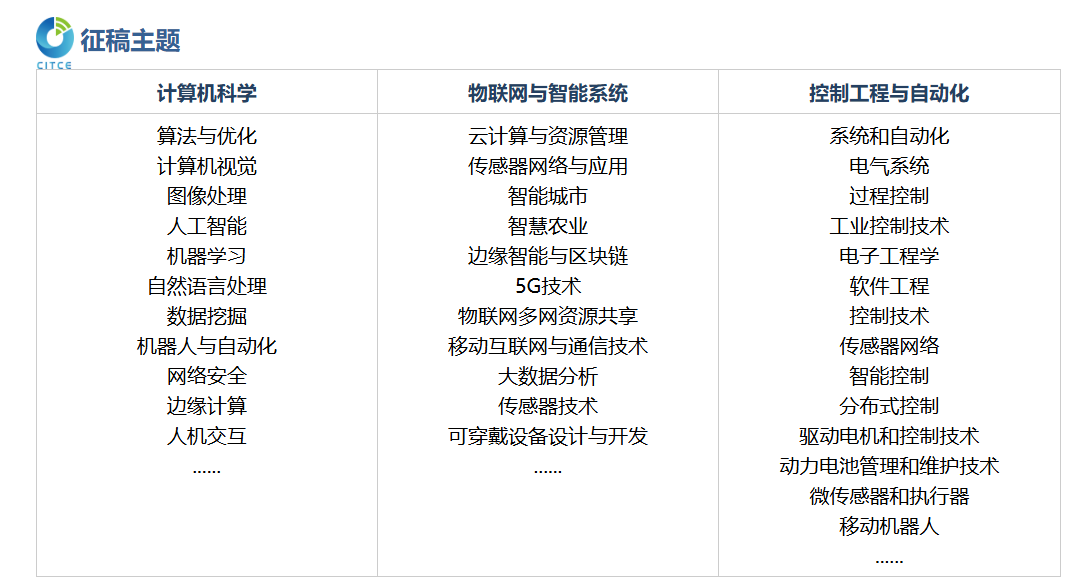
征稿主题
一、核心技术体系与交叉融合架构
1.1 技术体系的协同架构
计算机、物联网与控制工程的融合形成了多层次技术架构,各模块的协同关系如下:
| 技术领域 | 核心模块 | 关键技术 | 协同作用 |
|---|---|---|---|
| 计算机技术 | 计算平台、算法引擎 | 边缘计算、云计算、AI 算法 | 数据处理与智能决策 |
| 物联网技术 | 感知层、网络层 | 传感器网络、MQTT 协议、RFID | 数据采集与传输 |
| 控制工程 | 控制层、执行层 | PID 控制、模糊控制、模型预测控制 | 物理系统调节与执行 |
1.2 技术融合的典型特征
三者的融合呈现出实时性 、智能化 、分布式等特征:
- 实时性:物联网采集数据通过边缘计算快速处理,控制指令低延迟响应
- 智能化:AI 算法嵌入控制流程,实现自适应决策与优化
- 分布式:多节点协同工作,构建去中心化的智能控制系统
二、物联网技术的实践与应用
2.1 物联网通信协议对比与选型
物联网设备通信依赖多样化协议,不同协议的特性对比:
| 通信协议 | 传输距离 | 功耗 | 传输速率 | 适用场景 |
|---|---|---|---|---|
| MQTT | 远(TCP/IP) | 低 | 中 | 设备消息传输 |
| ZigBee | 中 | 极低 | 低 | 智能家居、工业传感 |
| LoRa | 极远 | 低 | 低 | 广域物联网 |
| 5G | 远 | 中 | 极高 | 高带宽低时延场景 |
2.2 物联网数据采集与处理示例
以下是基于 Python 的物联网数据采集与解析代码:
python
运行
import paho.mqtt.client as mqtt
import json
# MQTT客户端配置
MQTT_BROKER = "broker.emqx.io"
MQTT_PORT = 1883
MQTT_TOPIC = "sensor/data"
def on_connect(client, userdata, flags, rc):
print(f"Connected with result code {rc}")
client.subscribe(MQTT_TOPIC)
def on_message(client, userdata, msg):
# 解析传感器数据
payload = json.loads(msg.payload.decode())
sensor_id = payload["sensor_id"]
temperature = payload["temperature"]
humidity = payload["humidity"]
timestamp = payload["timestamp"]
print(f"传感器[{sensor_id}]数据:温度={temperature}°C,湿度={humidity}%,时间={timestamp}")
# 数据预处理与阈值判断
if temperature > 30:
print(f"警告:传感器[{sensor_id}]温度过高!")
# 初始化MQTT客户端
client = mqtt.Client()
client.on_connect = on_connect
client.on_message = on_message
client.connect(MQTT_BROKER, MQTT_PORT, 60)
client.loop_forever()三、智能控制算法的实现与优化
3.1 模型预测控制(MPC)的应用示例
模型预测控制适用于多变量约束系统,以下是简化的 MPC 实现代码:
python
运行
import numpy as np
from scipy.optimize import minimize
class MPCController:
def __init__(self, model, horizon=5):
self.model = model # 系统模型:x_{k+1} = f(x_k, u_k)
self.horizon = horizon # 预测时域
self.u_bounds = [(-1, 1)] # 控制输入约束
def cost_function(self, u_seq, x0, setpoint):
# 计算预测时域内的成本
x = x0
cost = 0
for u in u_seq.reshape(-1, 1):
x = self.model(x, u)
cost += np.sum((x - setpoint)**2) + 0.1 * np.sum(u**2)
return cost
def compute_control(self, x0, setpoint):
# 初始化控制序列
u_init = np.zeros(self.horizon)
# 优化控制序列
result = minimize(self.cost_function, u_init, args=(x0, setpoint),
bounds=self.u_bounds * self.horizon)
# 返回第一个控制输入
return result.x[0]
# 一阶系统模型:x_{k+1} = 0.8*x_k + 0.5*u_k
def system_model(x, u):
return 0.8 * x + 0.5 * u
# MPC控制示例
mpc = MPCController(system_model, horizon=5)
x = 0 # 初始状态
setpoint = 5 # 目标值
for step in range(20):
u = mpc.compute_control(x, setpoint)
x = system_model(x, u)
print(f"Step {step}: 状态={x:.2f},控制输入={u:.2f}")3.2 强化学习在控制中的应用
强化学习通过与环境交互优化控制策略,以下是倒立摆控制的 Q-learning 实现:
python
运行
import numpy as np
class QLearningController:
def __init__(self, state_dim, action_dim, alpha=0.1, gamma=0.9, epsilon=0.1):
self.q_table = np.zeros((state_dim, action_dim))
self.alpha = alpha # 学习率
self.gamma = gamma # 折扣因子
self.epsilon = epsilon # 探索率
def choose_action(self, state):
# ε-贪心策略
if np.random.uniform(0, 1) < self.epsilon:
return np.random.choice(self.q_table.shape[1])
else:
return np.argmax(self.q_table[state, :])
def learn(self, state, action, reward, next_state):
# Q值更新
old_value = self.q_table[state, action]
next_max = np.max(self.q_table[next_state, :])
new_value = old_value + self.alpha * (reward + self.gamma * next_max - old_value)
self.q_table[state, action] = new_value
# 倒立摆环境简化模型
def pendulum_env(state, action):
angle, angle_vel = state
# 动作:0(左推)、1(不动)、2(右推)
torque = (action - 1) * 0.5
angle_vel += (3 * np.cos(angle) + torque) * 0.05
angle += angle_vel * 0.05
angle_vel *= 0.99 # 阻尼
# 状态离散化(角度分10区间,角速度分10区间)
angle_bin = int((angle + np.pi) / (2*np.pi/10)) % 10
vel_bin = int((angle_vel + 8) / (16/10)) % 10
next_state = angle_bin * 10 + vel_bin
# 奖励计算
reward = np.cos(angle) if abs(angle) < np.pi/2 else -10
done = abs(angle) > np.pi/2
return next_state, reward, done
# 训练过程
controller = QLearningController(state_dim=100, action_dim=3)
episodes = 1000
for episode in range(episodes):
state = (np.random.uniform(-np.pi/4, np.pi/4), 0)
state_bin = int((state[0] + np.pi)/(2*np.pi/10))*10 + int((state[1]+8)/(16/10))
total_reward = 0
for _ in range(200):
action = controller.choose_action(state_bin)
next_state_bin, reward, done = pendulum_env(state, action)
controller.learn(state_bin, action, reward, next_state_bin)
state_bin = next_state_bin
total_reward += reward
if done:
break
if episode % 100 == 0:
print(f"Episode {episode}: 总奖励={total_reward:.2f}")四、系统集成与工程实践
4.1 边缘计算与物联网的融合架构
边缘计算将计算能力下沉至物联网边缘节点,典型架构包括:
- 感知层:传感器、智能设备采集数据
- 边缘层:边缘网关、边缘服务器实现数据预处理与实时控制
- 云端层:大数据分析、模型训练与全局优化
4.2 工业控制系统的安全防护
工业控制系统面临网络攻击风险,防护策略包括:
- 网络隔离:采用 DMZ 区域隔离生产网与办公网
- 访问控制:基于角色的权限管理(RBAC)
- 入侵检测:异常流量分析、行为模式识别
- 数据加密:传输层采用 TLS/SSL,存储数据加密
五、国际交流与合作机会
作为国际学术会议,将吸引全球范围内的专家学者参与。无论是发表研究成果、聆听特邀报告,还是在圆桌论坛中与行业大咖交流,都能拓宽国际视野,甚至找到潜在的合作伙伴。对于高校师生来说,这也是展示研究、积累学术人脉的好机会。
