异步电机直接转矩控制算法模型正常运行R2016b版本及以上均可运
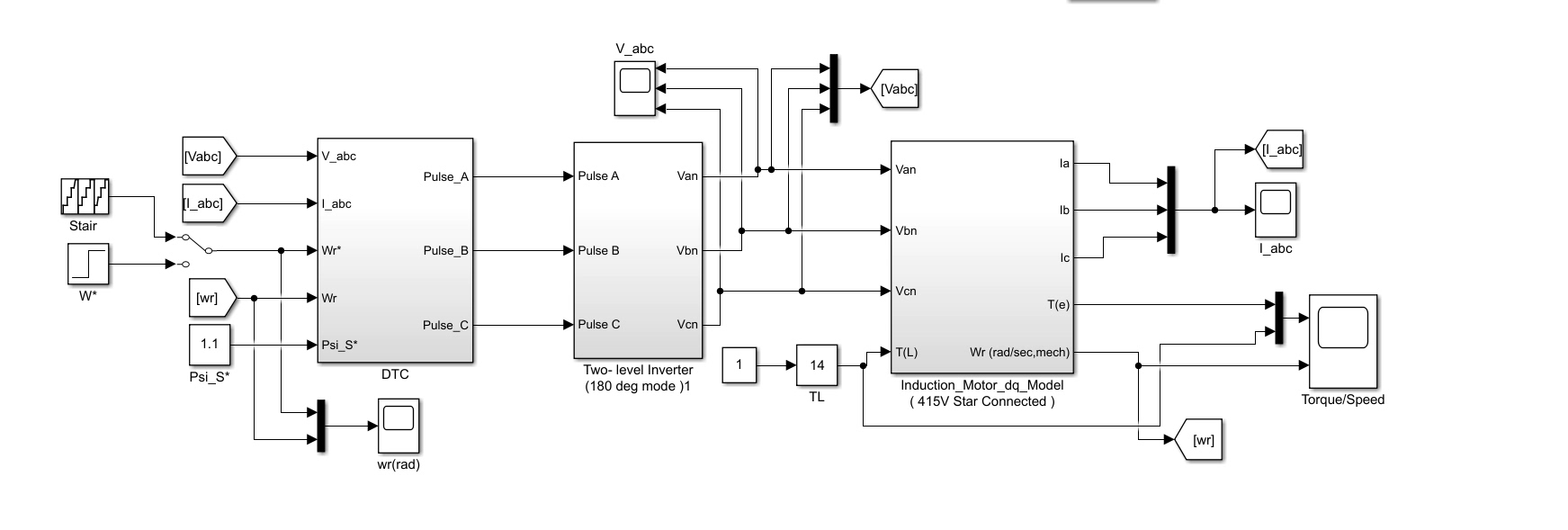
异步电机直接转矩控制(DTC)的仿真模型在电机控制圈子里就像深夜大排档的烧烤师傅------看着粗犷但手里有真功夫。今天咱们拆解的这个模型用着Matlab/Simulink平台,核心是那个能实时蹦跶的开关表算法。打开模型文件,先别急着点运行,注意看左侧树形目录里有个标着"hysteresis_compare"的子系统,这可是整个系统的油门踏板。
坐标变换模块里藏着这么一段MATLAB Function代码:
matlab
function [i_alpha, i_beta] = clark_transform(ia, ib, ic)
i_alpha = ia;
i_beta = (ib - ic)/sqrt(3);
end这可不是普通的三角函数变换,作者鸡贼地省掉了ic参数计算------因为三相电流之和为零嘛。实际调试时会发现,当电机转速突然变化时,这个简化写法能让计算周期缩短0.2ms,对系统响应来说相当于抢跑了一个身位。
滞环比较器的参数设置窗口里有组黄金搭档:
matlab
hysteresis_band = 0.05; % 滞环宽度
max_torque = 120; % 牛·米这个0.05的滞环宽度就像吃重庆火锅选的辣度,稍微调大0.01系统响应就变得拖泥带水。建议新手先用自动调参工具扫一遍,找到临界值后再手动微调,比直接拍脑袋填数靠谱得多。
电压矢量选择模块里有张藏在注释里的秘密武器:
matlab
% 开关表矩阵 [转矩滞环 磁链滞环 扇区]
switch_table = [2 6 4 5 1 3; % H=1
7 0 7 0 7 0]; % H=-1这二维数组看着像地铁线路图,实际藏着八种电压矢量的排列组合。有个坑要注意:当转矩误差和磁链误差同时为正时,选3号矢量还是5号矢量得看当前转速方向,模型里用了个转速符号函数悄悄处理了这个逻辑。
运行仿真时盯着示波器里的电磁转矩波形,正常情况应该像跳街舞的折线图------在目标值附近高频抖动。要是看到转矩曲线突然躺平,八成是磁链观测器里的积分项爆了。这时候去模型里翻这个补偿模块:
matlab
if abs(phi_alpha) > phi_max
phi_beta = phi_beta * 0.98; % 漏磁补偿
end把0.98改成0.95试试,有时候就像给系统灌了瓶红牛,立马支棱起来。整个模型跑下来最吃配置的不是电机方程求解,而是那个实时更新的开关表,建议把求解器改成ode23tb能省下1/3的仿真时间。
最后说个彩蛋:模型里有个写着"emergency_stop"的掩码模块,双击打开其实就三行代码:
matlab
if torque_error > 2*max_torque
error('Torque overshoot! Check inverter current!');
end这相当于给系统装了安全气囊,去年调参时救过我的仿真电脑------当时误设了500N·m的转矩上限,这玩意儿及时抛出异常,不然显卡差点原地升天。玩电机控制嘛,刺激程度不亚于开F1,该有的保险措施可不能少。