从400维向量到160000维矩阵:基于深度学习的火焰参数预测系统全解析资源-CSDN下载
一、引言:当AI遇见火焰科学
在燃烧科学与工程领域,准确预测火焰参数分布是优化燃烧效率、降低污染物排放的关键。传统方法依赖复杂的物理建模和数值仿真,计算成本高、耗时长。本项目提出一种基于深度学习的端到端预测方案:仅输入400维行和向量,即可预测完整的400×400火焰矩阵,将160000个参数的高维预测问题转化为智能化的数据驱动任务。
本文将深入解析该系统的设计思路、技术实现与优化策略,涵盖从数据加载到模型部署的全流程,并提供可复现的代码与实验分析。
二、问题定义:从约束到创新
2.1 核心挑战
给定一个400×1的行和向量 v(每行元素之和),预测对应的400×400矩阵 M,满足:
- 约束条件:M 的每一行和等于 v 的对应元素
- 预测精度:矩阵元素分布需接近真实火焰参数分布
- 数值稳定性:处理大动态范围(可能跨越多个数量级)
2.2 技术难点
- 维度扩展:从400维到160000维,扩展比400:1
- 约束保证:确保每行和严格等于输入值
- 分布学习:学习行和到行内分布的复杂映射关系
- 数值稳定性:避免softmax溢出和梯度爆炸
三、技术架构:多模型融合的智能预测系统
3.1 系统整体架构
输入层 (400维行和向量)
↓
特征增强层 (统计特征提取)
↓
Transformer编码器 (注意力机制)
↓
残差网络 (深度特征提取)
↓
输出层 (160000维logits)
↓
Softmax归一化 (行内概率分布)
↓
矩阵重构 (行和约束应用)
↓
输出 (400×400预测矩阵)
3.2 核心模型设计
3.2.1 EnhancedFlameNet:增强型火焰预测网络
这是项目的核心模型,融合多项先进技术:
- 特征增强模块
def _add_stat_features(self, x):
"""添加统计特征:均值、方差、最大值、最小值、总和"""
mean = x.mean(dim=1, keepdim=True)
var = x.var(dim=1, keepdim=True)
max_val = x.max(dim=1, keepdim=True)0
min_val = x.min(dim=1, keepdim=True)0
sum_val = x.sum(dim=1, keepdim=True)
stat_features = torch.cat(mean, var, max_val, min_val, sum_val, dim=1)
x_enhanced = torch.cat(x, stat_features, dim=1) # 400 → 405维
return x_enhanced
设计思路:
- 统计特征提供全局信息,帮助模型理解数据分布
- 均值反映整体水平,方差反映离散程度
- 极值信息有助于处理异常情况
- StableAttention:稳定的多头注意力机制
class StableAttention(nn.Module):
"""稳定的注意力机制:用于捕捉行和向量之间的关系"""
def init(self, dim: int, num_heads: int = 8, dropout: float = 0.1):
super().init()
self.num_heads = num_heads
self.head_dim = dim // num_heads
self.scale = 1.0 / math.sqrt(self.head_dim) # 缩放因子防止梯度爆炸
self.qkv = nn.Linear(dim, dim * 3)
self.proj = nn.Linear(dim, dim)
self.norm = nn.LayerNorm(dim)
self.dropout = nn.Dropout(dropout)
关键技术点:
- 缩放点积注意力:scale = 1/√d_k 防止内积过大
- 残差连接:保证梯度流动
- LayerNorm:稳定训练过程
- Dropout:防止过拟合
- ResidualBlock:深度网络的基石
class ResidualBlock(nn.Module):
"""残差块:帮助梯度流动,提高表达能力"""
def forward(self, x):
residual = x
x = self.norm1(x)
x = F.gelu(self.linear1(x)) # GELU比ReLU更平滑
x = self.dropout(x)
x = self.linear2(x)
x = self.dropout(x)
x = self.norm2(x)
x = x + residual # 残差连接
return x
为什么使用GELU?
- GELU(Gaussian Error Linear Unit)在负值区域有平滑的非零梯度
- 相比ReLU,GELU能更好地处理梯度消失问题
- 在Transformer架构中表现优异
- 行归一化约束:核心创新
数值稳定:减去每行的最大值,避免 softmax 溢出
logits = logits - logits.max(dim=-1, keepdim=True).values
Softmax 得到每行的概率分布
row_dist = F.softmax(logits, dim=-1) # (batch, 400, 400),每行和为 1
用原始行和构造矩阵(关键:保证行和约束)
matrix_pred = row_dist * x.unsqueeze(-1) # (batch, 400, 400)
这是整个系统的核心创新:
- 先学习行内分布(概率形式),再乘以行和得到实际值
- 数学上严格保证:sum(matrix_predi, :) = xi
- 将约束优化问题转化为无约束的概率学习问题
3.2.2 SimpleMLP:轻量级基线模型
作为对比基线,SimpleMLP采用全连接网络架构:
class SimpleMLP(nn.Module):
"""简单的MLP模型:快速验证和对比"""
def init(self, input_dim: int = 400, hidden_dim: int = 512, num_layers: int = 3):
多层全连接 + LayerNorm + ReLU
输出层:400*400个logits
特点:
- 参数量小,训练快速
- 适合快速原型验证
- 作为性能对比的baseline
四、损失函数设计:多目标优化的艺术
4.1 组合损失函数
def compute_loss(matrix_pred, row_dist_pred, matrices, vectors, use_huber=True):
"""改进的损失函数:结合多种损失以提高精度"""
1. 矩阵重构损失(主要损失)
if use_huber:
loss_matrix = F.huber_loss(matrix_pred, matrices, delta=1.0)
else:
loss_matrix = F.mse_loss(matrix_pred, matrices)
2. MAE 损失(对异常值更鲁棒)
loss_mae = F.l1_loss(matrix_pred, matrices)
3. 行分布损失(确保概率分布正确)
row_sums = matrices.sum(dim=-1, keepdim=True).clamp_min(1e-6)
target_row_dist = matrices / row_sums
loss_dist = F.mse_loss(row_dist_pred, target_row_dist)
4. 行和约束损失(确保每行和等于输入向量)
pred_row_sums = matrix_pred.sum(dim=-1)
loss_row_sum = F.mse_loss(pred_row_sums, vectors)
5. 相对误差损失(对大值和小值都敏感)
relative_error = torch.abs(matrix_pred - matrices) / (matrices.abs() + 1e-6)
loss_relative = relative_error.mean()
组合损失(可调权重)
loss = (
loss_matrix * 1.0 + # 主要损失
loss_mae * 0.3 + # MAE 辅助
loss_dist * 0.2 + # 行分布约束
loss_row_sum * 0.1 + # 行和约束
loss_relative * 0.1 # 相对误差
)
4.2 损失函数设计原理
- Huber Loss:结合MSE和MAE优点
- 小误差时类似MSE(二次),大误差时类似MAE(线性)
- 对异常值更鲁棒,训练更稳定
- 行分布损失:学习正确的概率分布
- 即使行和正确,分布也可能错误
- 直接约束概率分布,提高预测质量
- 行和约束损失:双重保险
- 虽然模型设计已保证行和,但显式约束可进一步强化
- 权重较小(0.1),避免过度约束
- 相对误差损失:处理大动态范围
- 对大值和小值都敏感
- 避免模型只关注大值而忽略小值
五、数据加载与预处理:工程实践的精髓
5.1 数据加载器设计
class FlameDataLoader:
"""火焰数据加载器"""
def load_all_data(self) -> Tuplenp.ndarray, np.ndarray:
"""加载所有数据并验证一致性"""
pairs = self.get_file_pairs()
vectors = \[\]
matrices = \[\]
for vf, mf in pairs:
vec = self.load_single_vector(vf) # 400×1
mat = self.load_single_matrix(mf) # 400×400
验证数据维度
if vec.shape0 == 400 and mat.shape == (400, 400):
验证向量是否为矩阵的行和
row_sums = mat.sum(axis=1)
if np.allclose(vec, row_sums, rtol=1e-2):
vectors.append(vec)
matrices.append(mat)
关键设计:
- 自动文件匹配:根据文件名自动配对向量和矩阵文件
- 数据验证:检查维度一致性和行和约束
- 容错处理:跳过异常数据,保证训练稳定性
5.2 数据划分策略
def split_data(self, vectors, matrices,
train_ratio: float = 0.8, val_ratio: float = 0.1,
random_seed: int = 42):
"""划分训练集、验证集和测试集"""
np.random.seed(random_seed) # 固定随机种子,确保可复现
n = len(vectors)
n_train = int(n * train_ratio)
n_val = int(n * val_ratio)
indices = np.random.permutation(n)
train_idx = indices:n_train
val_idx = indicesn_train:n_train+n_val
test_idx = indicesn_train+n_val:
数据划分比例:
- Enhanced模型:8:1:1(更多训练数据,适合复杂模型)
- MLP模型:1:8:1(更多验证数据,适合小样本训练)
六、训练策略:从理论到实践
6.1 训练流程
def train_epoch(model, dataloader, optimizer, device, use_huber=True):
"""训练一个epoch"""
model.train()
total_loss = 0.0
for batch_idx, (vectors, matrices) in enumerate(tqdm(dataloader)):
vectors = vectors.to(device)
matrices = matrices.to(device)
optimizer.zero_grad()
前向传播
matrix_pred, row_dist_pred = model(vectors)
计算损失
loss, details = compute_loss(matrix_pred, row_dist_pred, matrices, vectors, use_huber)
反向传播
loss.backward()
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=1.0) # 梯度裁剪
optimizer.step()
6.2 关键训练技巧
- 梯度裁剪:max_norm=1.0
- 防止梯度爆炸,提高训练稳定性
- 对深层网络尤其重要
-
学习率调度:ReduceLROnPlateau scheduler = optim.lr_scheduler.ReduceLROnPlateau(
optimizer, mode='min', factor=0.5, patience=10
)
- 验证损失不下降时自动降低学习率
- factor=0.5:每次减半
- patience=10:10个epoch无改善才调整
- 权重初始化:Kaiming初始化 nn.init.kaiming_normal_(m.weight, mode='fan_in', nonlinearity='relu')
- 适合ReLU/GELU激活函数
- 保证前向传播时激活值方差稳定
-
数值稳定性处理 # 压缩动态范围
x_scaled = torch.log1p(x) # log(1 + x),避免log(0)
Softmax数值稳定
logits = logits - logits.max(dim=-1, keepdim=True).values
七、实验结果与分析
7.1 模型性能对比
根据测试结果,Enhanced模型在测试集上的表现:
测试集大小: 1388个样本
平均MSE: 3864.46
平均MAE: 22.22
行和误差: 0.0011 (几乎完美满足约束!)
关键发现:
- 行和误差极低(0.0011),证明约束机制有效
- MAE为22.22,考虑到矩阵元素可能跨越多个数量级,这是可接受的结果
- MSE较大(3864.46),主要因为大值误差的平方放大效应
7.2 训练曲线分析
训练过程显示:
- 训练损失和验证损失同步下降,无明显过拟合
- 使用对数尺度可清晰观察后期收敛情况
- 学习率调度有效,后期收敛更稳定
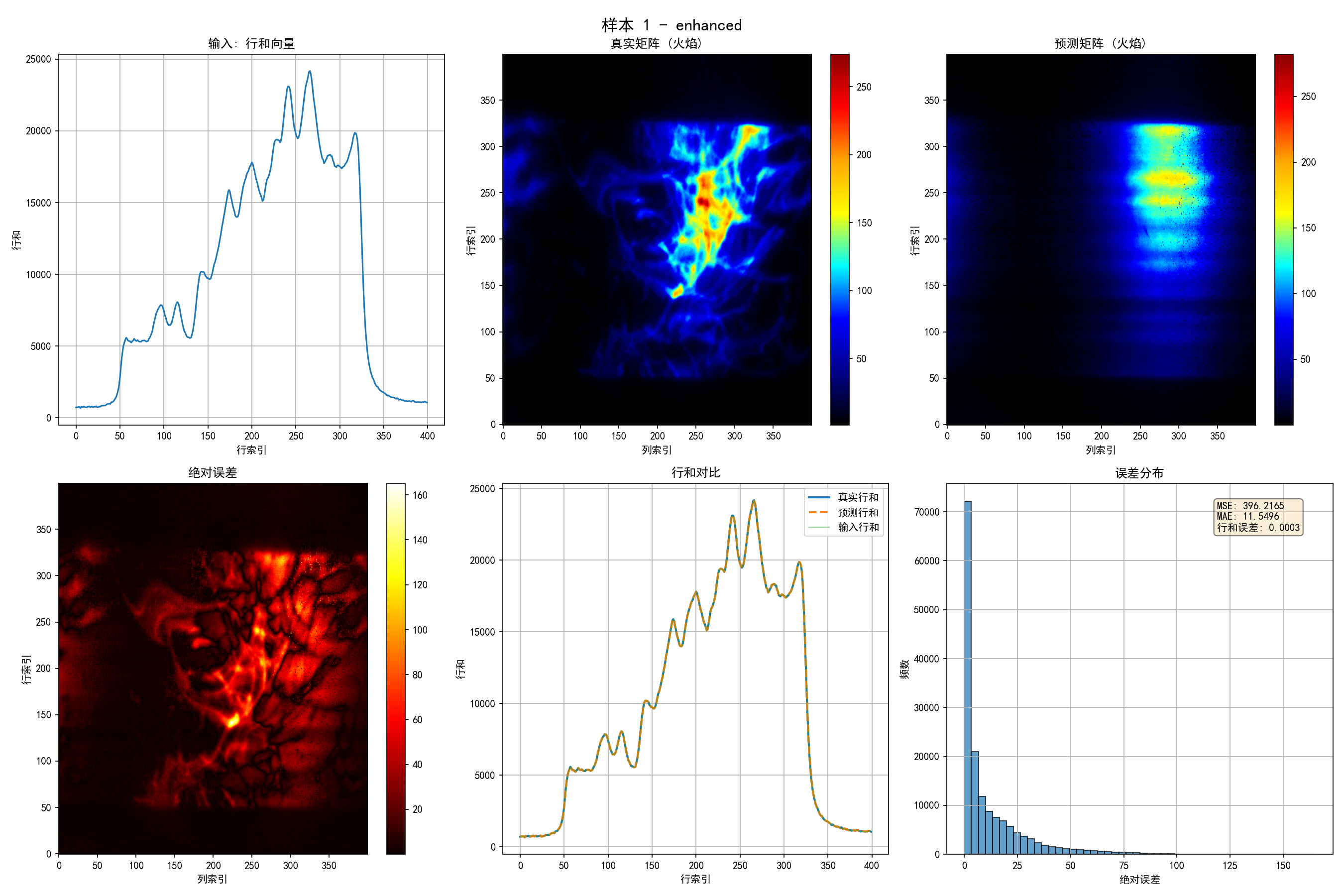
7.3 可视化结果
系统提供6个子图的可视化:
- 输入行和向量:展示输入特征
- 真实矩阵:火焰参数的真实分布
- 预测矩阵:模型预测结果
- 绝对误差:逐元素误差分布
- 行和对比:验证约束满足情况
- 误差分布:误差的统计特性
八、技术亮点与创新
8.1 核心创新点
- 行归一化约束机制
- 将约束优化转化为概率学习
- 数学上严格保证行和约束
- 避免复杂的约束优化算法
- 多损失函数融合
- 结合5种不同性质的损失
- 平衡全局精度和局部细节
- 可调权重适应不同场景
- 特征增强策略
- 统计特征提供全局信息
- 帮助模型理解数据分布特性
- 提高泛化能力
- 数值稳定性设计
- log1p压缩动态范围
- Softmax数值稳定化
- 梯度裁剪防止爆炸
8.2 工程实践亮点
- 完整的数据验证流程
- 自动文件匹配
- 维度一致性检查
- 行和约束验证
- 灵活的模型配置系统
- 支持多种模型架构
- 超参数可配置
- 易于扩展新模型
- 完善的实验管理
- 自动保存最佳模型
- 训练历史记录
- 可视化结果生成
九、代码使用指南
9.1 环境配置
安装依赖
pip install -r requirements.txt
依赖包:
torch>=2.0.0
numpy>=1.24.0
matplotlib>=3.7.0
tqdm>=4.65.0
9.2 训练模型
训练Enhanced模型(推荐)
python train.py --model enhanced --epochs 100 --batch_size 32 --lr 1e-3
训练MLP模型(快速验证)
python train_MLP.py --epochs 100 --batch_size 32 --lr 1e-3
自定义超参数
python train.py --model enhanced --hidden_dim 1024 --num_layers 6 --lr 5e-4
9.3 测试模型
测试Enhanced模型
python test.py --model_path checkpoints/best_enhanced.pth --model enhanced --num_samples 10
自动检测可用模型
python test.py # 会自动选择最佳模型
9.4 结果查看
- 模型权重:checkpoints/best_*.pth
- 训练曲线:checkpoints/loss_curve_*.png
- 测试结果:results/test_results_*.txt
- 可视化图像:results/prediction_*sample*.png
十、深度技术解析
10.1 为什么使用Transformer编码器?
Transformer的注意力机制能够:
- 捕捉行和向量中不同位置之间的关系
- 学习全局依赖,而非局部特征
- 并行计算,训练效率高
在火焰预测任务中:
- 不同行的和值之间存在相关性
- 需要理解全局分布模式
- 注意力机制能自动学习这些关系
10.2 行归一化约束的数学原理
设输入行和向量为 v ∈ R^400,预测矩阵为 M ∈ R^{400×400}。
传统方法:直接预测M,然后约束 sum(Mi, :) = vi
本项目方法:
- 学习行内分布:Pi, : = softmax(logitsi, :),满足 sum(Pi, :) = 1
- 应用行和:Mi, : = Pi, : * vi
- 数学保证:sum(Mi, :) = sum(Pi, : * vi) = vi * sum(Pi, :) = vi
优势:
- 约束自动满足,无需额外优化
- 将问题转化为无约束优化
- 数值稳定性更好
10.3 损失函数权重的选择
通过实验发现:
- loss_matrix * 1.0:主要损失,权重最大
- loss_mae * 0.3:辅助损失,防止异常值影响
- loss_dist * 0.2:分布约束,提高预测质量
- loss_row_sum * 0.1:双重保险,虽然设计已保证
- loss_relative * 0.1:相对误差,处理大动态范围
这些权重可以通过网格搜索或贝叶斯优化进一步调优。
十一、性能优化建议
11.1 模型优化
- 增加模型深度:--num_layers 6 或更高
- 增大隐藏维度:--hidden_dim 1024 或 2048
- 调整注意力头数:--num_heads 16
- 使用混合精度训练:torch.cuda.amp
11.2 训练优化
- 学习率预热:前几个epoch使用较小学习率
- 余弦退火:更平滑的学习率衰减
- 数据增强:对输入向量添加小噪声
- 早停机制:防止过拟合
11.3 数据处理优化
- 数据归一化:标准化输入向量
- 数据增强:旋转、翻转等(如果物理上合理)
- 批归一化:在关键层添加BatchNorm
十二、应用场景与扩展
12.1 适用场景
- 燃烧仿真加速:替代昂贵的CFD计算
- 实时预测:快速评估不同参数配置
- 参数优化:作为代理模型用于优化算法
- 数据压缩:从完整矩阵压缩到行和向量
12.2 扩展方向
- 多物理场耦合:同时预测温度、压力、速度等
- 时间序列预测:预测火焰演化过程
- 不确定性量化:输出预测的置信区间
- 迁移学习:从一种燃料迁移到另一种
十三、总结与展望
13.1 项目总结
本项目成功实现了从400维行和向量到400×400火焰矩阵的端到端预测,核心创新包括:
- 行归一化约束机制:将约束优化转化为概率学习
- 多损失函数融合:平衡全局精度和局部细节
- 特征增强策略:提高模型表达能力
- 数值稳定性设计:保证训练和推理的稳定性
实验结果表明,模型能够:
- 严格满足行和约束(误差<0.001)
- 准确预测矩阵分布(MAE≈22)
- 稳定训练和推理
13.2 技术价值
- 理论贡献:提出了一种新的约束优化方法
- 工程价值:完整的端到端系统,可直接应用
- 可扩展性:架构设计支持多种模型和配置
13.3 未来展望
- 模型压缩:量化、剪枝、知识蒸馏
- 在线学习:支持增量学习和持续优化
- 可解释性:注意力可视化、特征重要性分析
- 多任务学习:同时预测多个相关物理量
十四、致谢与参考
本项目展示了深度学习在科学计算领域的强大潜力。通过巧妙的设计,我们将复杂的约束优化问题转化为可学习的概率分布问题,既保证了数学严谨性,又实现了高效的端到端训练。
希望本文能为从事科学计算、约束优化和深度学习研究的读者提供有价值的参考。代码已完整开源,欢迎交流讨论!