在计算机视觉领域,角点检测是特征提取的基础步骤之一,常用于图像匹配、目标跟踪、SLAM 等应用。角点(Corner)是指图像中强度变化剧烈的点,通常位于物体边缘的交汇处。本文将详细讲解两种经典的角点检测算法:Harris 角点检测 和 FAST (Features from Accelerated Segment Test),并比较它们的优缺点。
Harris 角点检测算法
Harris 角点检测算法由 Chris Harris 和 Mike Stephens 于 1988 年提出,是基于图像梯度的经典方法。它通过分析图像局部窗口的强度变化来判断是否为角点。
基本原理
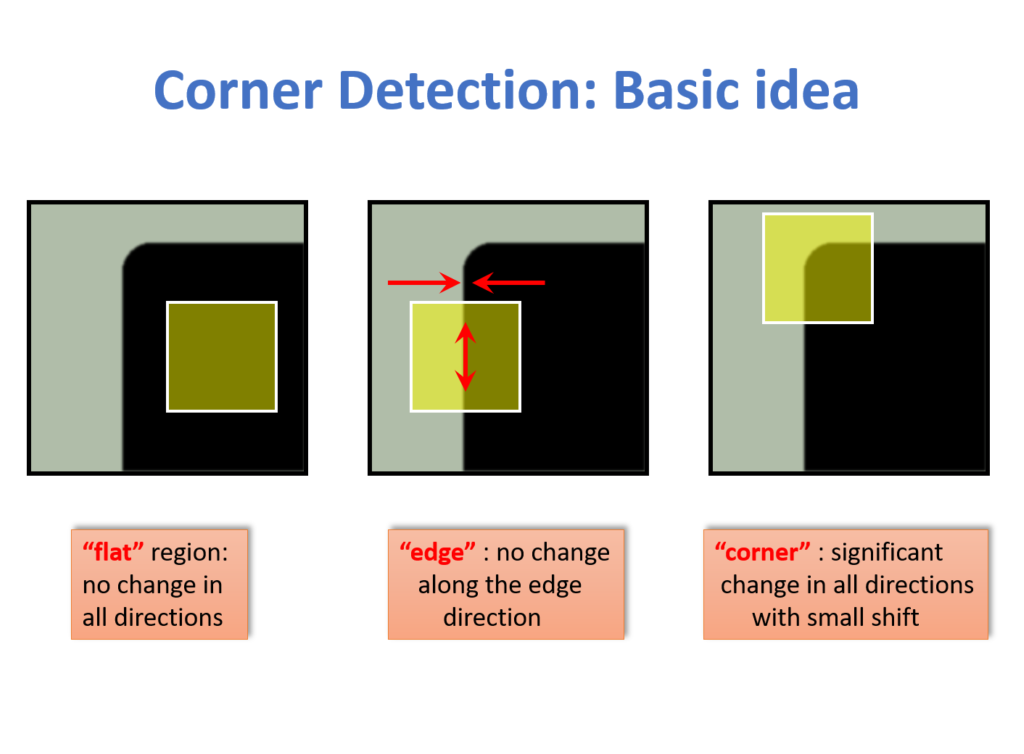
想象在一个小图像窗口上进行平移(u, v):
- 如果窗口位于平坦区域,所有方向变化都很小。
- 如果位于边缘,只沿边缘方向变化小,其他方向变化大。
- 如果位于角点,所有方向变化都剧烈。
可以参考以下示例图理解:
datahacker.rs![]() https://datahacker.rs/opencv-harris-corner-detector-part1/
https://datahacker.rs/opencv-harris-corner-detector-part1/
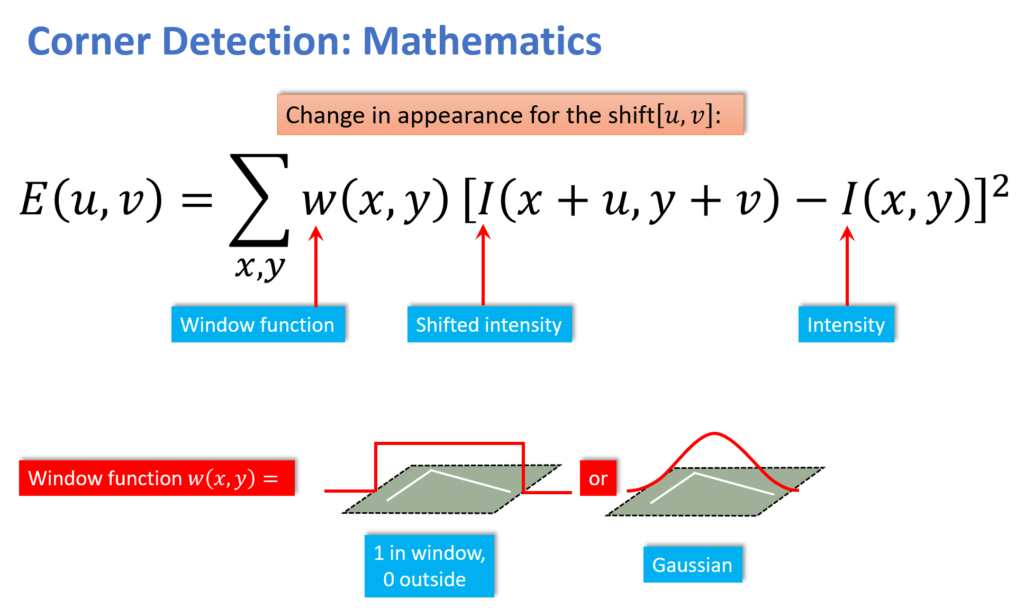
数学公式
-
计算图像在 x 和 y 方向的梯度:
通常使用 Sobel 算子。
-
计算结构张量矩阵 M 的元素:
(对窗口内像素求和,通常加高斯加权)。
-
计算角点响应函数 R:
具体展开为
其中
判断准则:
- 如果 R 大且正:角点
- 如果 R 负:边缘
- 如果 |R| 小:平坦区域
-
进行非极大值抑制(Non-maximal suppression)和阈值化得到最终角点。
Harris 算法鲁棒性强,对旋转有一定不变性,但计算量较大,需要梯度计算和高斯平滑。
改进:Shi-Tomasi 算法
1994 年,Jianbo Shi 和 Carlo Tomasi 提出改进,避免了敏感的 k 参数,直接使用:
当 RRR 大于阈值时即为"好特征点"(Good Features to Track)。在 OpenCV 中,
cv2.goodFeaturesToTrack() 即实现此版本,稳定性更好。
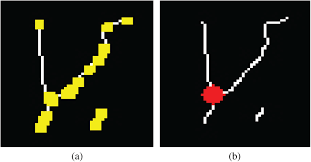
图中a是harris检测法,b是改进的fast检测法示例
Harris 对旋转具有不变性,对光照变化较鲁棒,但缺乏尺度不变性,且计算密集(需多次卷积)。
FAST 角点检测算法
FAST 算法由 Edward Rosten 和 Tom Drummond 于 2006 年提出(2010 年改进),旨在实现高速角点检测,特别适合实时应用。
基本原理
以候选像素 p 为中心,考察半径为 3 的 Bresenham 圆上的 16 个像素。如果存在连续 N 个(常用 N=9 或 12)像素的强度都显著比 p 亮(或都显著比 p 暗),则 p 为角点。
阈值 t 控制敏感度:
加速技巧
-
高频剔除:先只检查 4 个正交像素(1、5、9、13)。若至少 3 个满足条件,再检查全部 16 个(剔除率 >90%)。
-
机器学习优化:使用 ID3 决策树为每个位置训练最优检查顺序。
-
非极大值抑制:计算角点分数 V:
-

FAST 极快,常用于实时视频处理(如 ORB 特征中使用)。
Harris 与 FAST 的比较
| 方面 | Harris | FAST |
|---|---|---|
| 速度 | 较慢(需梯度计算和高斯平滑) | 极快(几倍于 Harris) |
| 准确性 | 高,鲁棒性强,对噪声和旋转较好 | 好,但易受噪声影响,可能检测冗余点 |
| 尺度不变性 | 无(需扩展如 Harris-Laplace) | 无 |
| 应用场景 | 精确匹配、立体视觉 | 实时跟踪、SLAM(如 ORB) |
| 资源消耗 | 高 | 低(适合嵌入式设备) |
Harris 更精确和稳定,但 FAST 在速度上碾压,尤其在资源受限的环境中。实际应用中,常融合两者(如先用 FAST 粗检测,再用 Harris 精炼)。
现代应用与衍生算法
- ORB(Oriented FAST and Rotated BRIEF,2011):使用改进的 FAST(添加方向估计)检测角点 + rBRIEF 描述子,实现旋转不变性与高效匹配,是 SIFT 的免费替代品,常用于实时 SLAM(如 ORB-SLAM)。
- SIFT/ SURF 等尺度不变特征常结合 Harris-Laplace 或 DoG 来精确定位角点。
- 深度学习时代,SuperPoint、D2-Net 等学习型检测器在重复性和鲁棒性上超越传统方法,但 Harris 与 FAST 仍因轻量级而在嵌入式设备中广泛使用。
总结
Harris 和 FAST 都是角点检测的里程碑算法。Harris 奠定了基于梯度的基础,而 FAST 则推动了实时视觉的发展。根据需求选择:追求精度用 Harris,追求速度用 FAST。OpenCV 中均有实现(如 cv2.cornerHarris() 和 cv2.FASTFeatureDetector),便于实验。