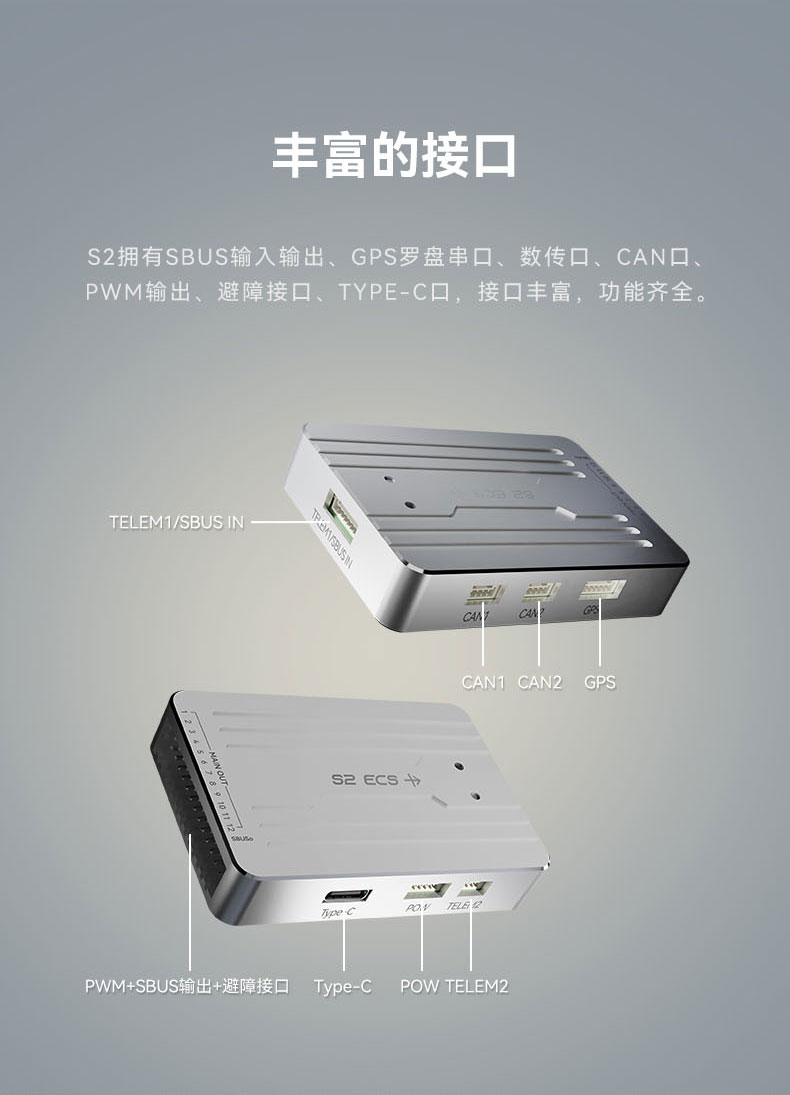
无人机飞控的CAN接口是一个基于控制器局域网(CAN)标准构建的模块化通信网络。它主要用于连接飞行控制器与电子调速器(电调)、GPS、传感器等关键设备,以实现高可靠性的实时数据交换和指令控制。
CAN总线核心特点
无人机CAN网络的设计借鉴了汽车工业的成熟标准,具有以下核心特点:
高可靠性:采用差分信号在双绞线上传输,抗电磁干扰能力强。
实时性:基于非破坏性仲裁机制,高优先级信息可快速发送。
多主拓扑:支持总线型、星型等多种拓扑结构。网络上的每个设备(节点)都有唯一标识(节点ID)。
数据完整性:内置CRC校验,确保数据传输无误。
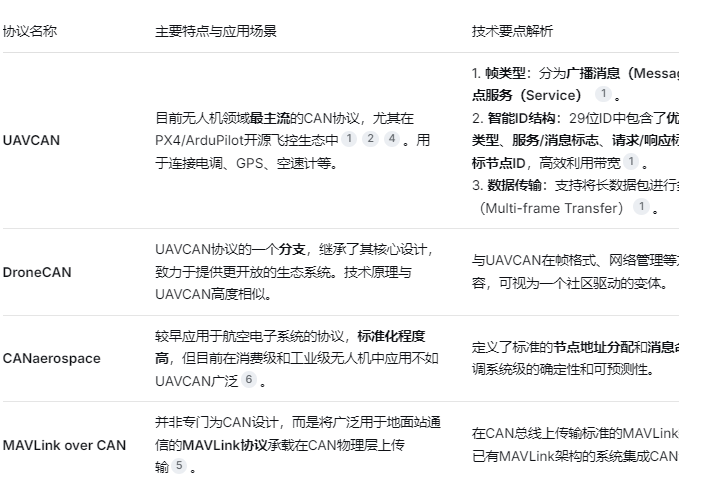
主要高层协议解析
无人机上常用的高层协议都构建在基础CAN 2.0B标准之上(使用29位扩展标识符),主要有以下几种:
主要技术与应用连接
在无人机系统中,CAN接口常用于连接以下关键设备:
电子调速器(ESC):接收来自飞控的油门指令,并上报转速、电流、温度等状态。
GNSS/RTK接收机:提供高精度的位置、速度、时间信息。
空速传感器:测量飞行空速。
其他外设:如动力模块、伺服机构(舵机)或任务载荷。
这些设备的连接,在开源飞控(如ArduPilot)中通常通过设置参数来配置。例如:
CAN_P1_DRIVER:指定物理CAN端口使用哪个协议驱动。
CAN_D1_UC_NODE:设置飞控在UAVCAN网络中的节点ID。
CAN_D1_UC_ESC_BM:通过位掩码指定控制哪些ID的电调。
如何选择与配置建议
1. 协议选择
对于大多数开源无人机项目(使用PX4/ArduPilot),UAVCAN/DroneCAN是首选,生态支持最完善。
若需与严格遵循航空电子标准的老系统集成,可考虑CANaerospace。
如果系统已深度依赖MAVLink,希望用CAN扩展内部总线,可选择"MAVLink over CAN"。
2. 配置关键点
终端电阻:CAN总线两端必须各接一个120Ω的终端电阻,以确保信号完整性。
节点ID:网络中的每个设备必须有唯一的节点ID(通常范围1127)。
比特率:常见的比特率为1 Mbit/s(1兆比特每秒),也可根据线缆质量和长度选择更低速率。
- 物理接口:实际硬件上,CAN接口通常通过特定的连接器引出,常见的引脚定义是CAN_H、CAN_L、GND 和可选的VCC。