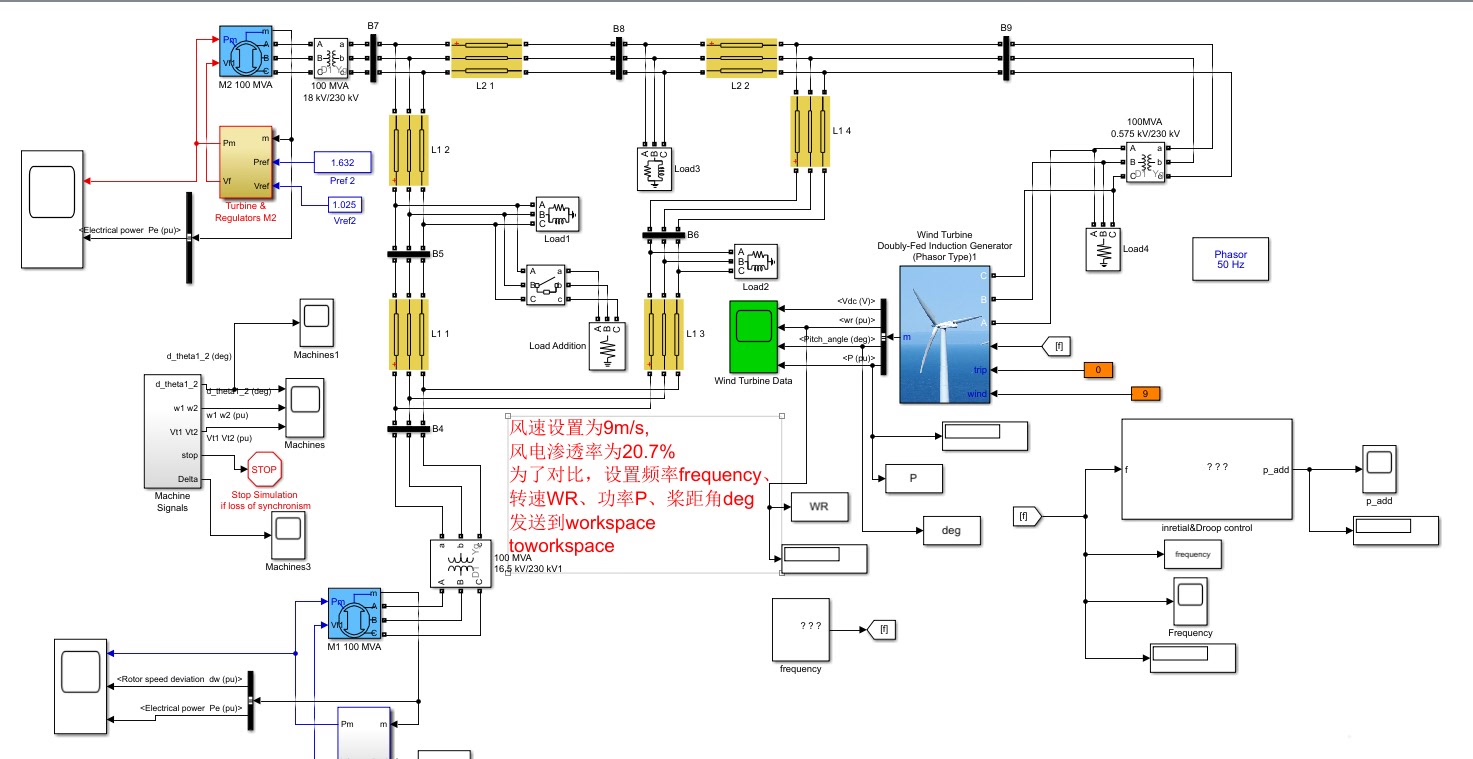
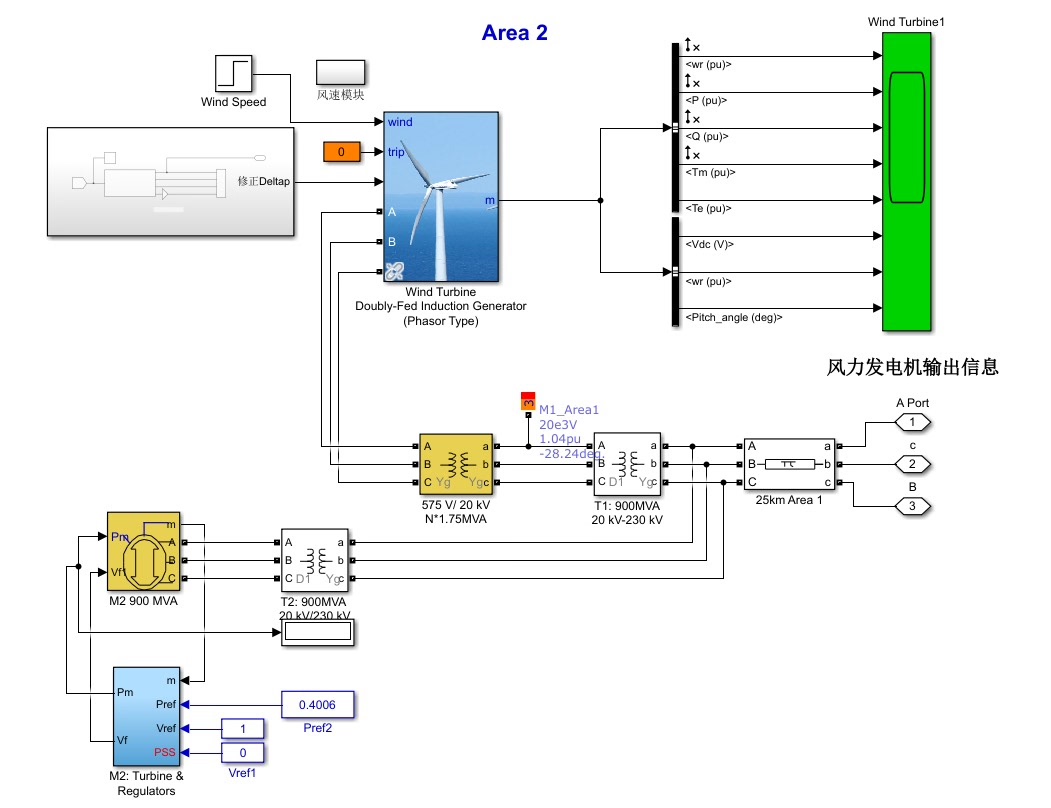
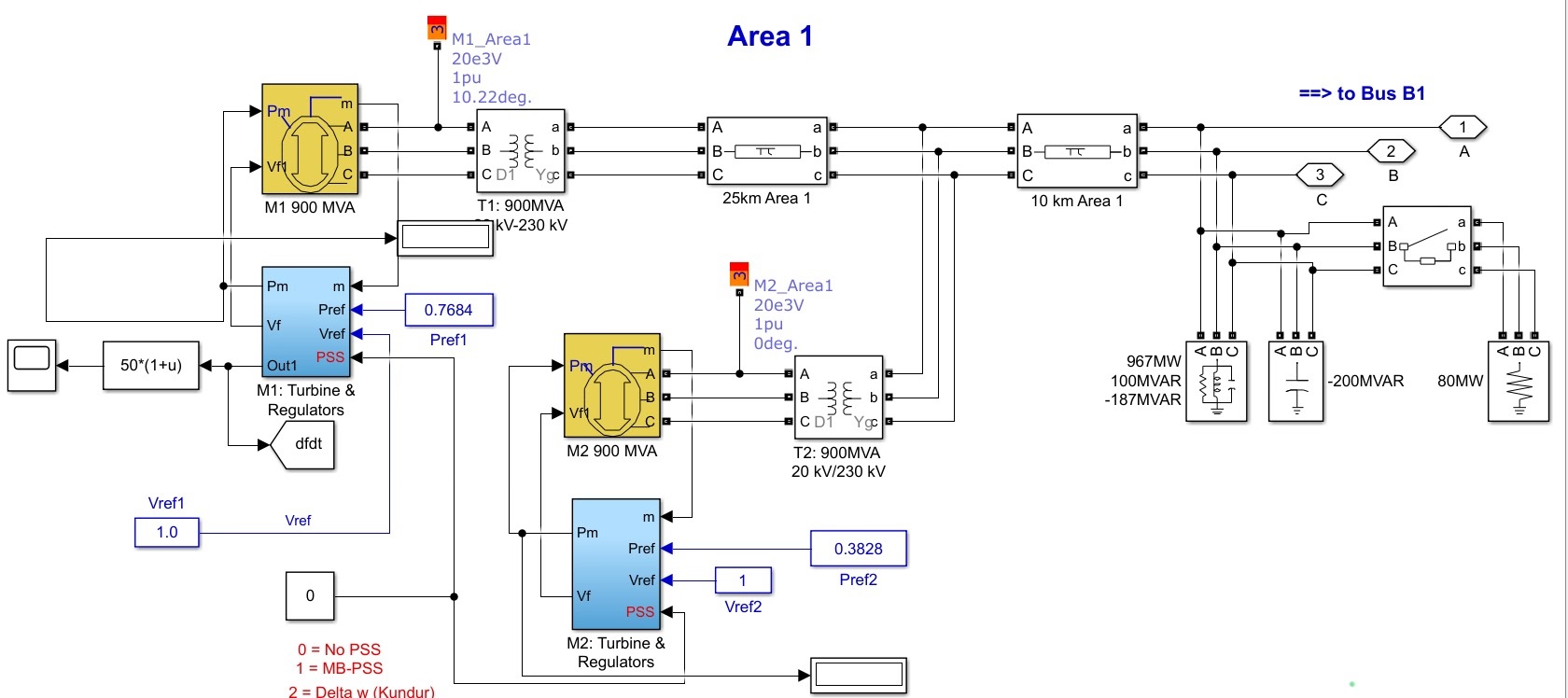
双馈风电机组并网matlab/simulink仿真建模,四机两区域/三机九节点系统,虚拟惯量+下垂控制/超速减载/桨距角控制调频,风储联合调频,低电压穿越故障等
双馈风电机组并网后的动态特性直接影响电网稳定性。咱们直接上Simulink撸个三机九节点模型试试水,先把双馈电机模型搭起来。在转子侧变流器控制环节,核心代码里藏着虚拟惯量的秘密:
matlab
function P_ref = VirtualInertia(df, K_inertia, P_base)
% 频率偏差参与有功调节
P_ref = P_base - K_inertia * df * 0.02; % 0.02秒惯性时间常数
end这段代码实现了虚拟惯量环节的关键算法,K_inertia参数直接决定惯量响应强度。当电网频率下跌时,算法会临时提升机组出力,相当于给系统加了机械飞轮效果。不过要注意,这个"临时借来"的功率得在后续10秒内逐步归还,否则储能单元会哭给你看。
搞下垂控制时遇到过坑没?某次仿真发现频率振荡死活消不掉,后来发现是下垂系数和虚拟惯量参数打架了。正确的下垂控制代码应该这样玩:
simulink
Droop_Control/
├── Frequency_Measure (PLL锁相环)
├── DeadBand (±0.05Hz死区)
└── K_droop = 5% //每1%频率变化触发5%功率调整死区设置太窄会导致控制器在噪声环境下抽风,建议实际工程取±0.1Hz比较稳。记得把下垂系数换算成标幺值,不同容量机组才能并联运行。
低电压穿越场景测试必须上狠活。在PCC点怼个三相短路故障,看转子撬棒电路是否及时动作。关键看crowbar电阻投入瞬间的直流母线电压波形:
matlab
scope_data = simout.signals.values;
plot(scope_data(:,3)); //直流母线电压曲线
hold on;
plot([fault_start,fault_start],[0,1200],'r--'); //故障起始标记正常情况应该在电压跌到820V时触发撬棒,把转子电流压到安全范围内。要是仿真出现母线电压跌到600V以下,赶紧检查crowbar触发逻辑的电压阈值设定。
储能调频配合风电时,重点在功率分配算法。试过这种混合控制策略没?
python
def power_distribute(df, dP_wind):
if abs(df) < 0.2:
ESS_power = 0.7*dP_wind # 储能承担70%
else:
ESS_power = dP_wind * np.tanh(df*5) # 非线性分配
return ESS_power这招能让储能在小频差时多出力,大频差时让风电机组本体也参与进来。注意别让储能SOC越限,否则调着调着突然没电就尴尬了。
桨距角控制调频容易忽略机械应力问题。某次仿真设了0.5秒的动作延迟,结果叶片扭矩波动直接爆表。后来改成两段式变桨:
C
// 变桨速率限制
if (beta_ref - beta_current) > 2度/秒
beta_step = beta_current + 2*Ts;
else
beta_step = beta_ref;速率限制模块必须加,不然齿轮箱寿命堪忧。建议把变桨动作与风速预测结合,提前0.5秒预动作能减少功率冲击。
最后说个仿真提速技巧:把风电场的详细电机模型换成等效聚合模型,仿真速度能提升3倍不止。但要注意等效惯性时间常数需要重新整定,别直接拿单机参数往上套。遇到过等效模型振荡模态丢失的情况吗?那是等效电路电阻没折算对,记得用频域阻抗匹配法校验。