
目录
[1. 什么是 "带权路径长度"?](#1. 什么是 “带权路径长度”?)
[2. 单源最短路的核心场景分类](#2. 单源最短路的核心场景分类)
[3. 关键定义:负环是什么?](#3. 关键定义:负环是什么?)
[4. 松弛操作:所有最短路算法的核心](#4. 松弛操作:所有最短路算法的核心)
[二、Dijkstra 算法:非负权图的最优解](#二、Dijkstra 算法:非负权图的最优解)
[1. 常规版 Dijkstra:适合稠密图](#1. 常规版 Dijkstra:适合稠密图)
[C++ 代码实现(邻接表版本)](#C++ 代码实现(邻接表版本))
[2. 堆优化版 Dijkstra:稀疏图的救星](#2. 堆优化版 Dijkstra:稀疏图的救星)
[C++ 代码实现(邻接表版本)](#C++ 代码实现(邻接表版本))
[3. 洛谷实战:单源最短路模板题](#3. 洛谷实战:单源最短路模板题)
[题目链接:P3371 【模板】单源最短路径(弱化版)](#题目链接:P3371 【模板】单源最短路径(弱化版))
[参考代码(直接复用常规版 Dijkstra)](#参考代码(直接复用常规版 Dijkstra))
[题目链接:P4779 【模板】单源最短路径(标准版)](#题目链接:P4779 【模板】单源最短路径(标准版))
[参考代码(复用堆优化版 Dijkstra)](#参考代码(复用堆优化版 Dijkstra))
[三、Bellman-Ford 算法:处理负权边的 "暴力美学"](#三、Bellman-Ford 算法:处理负权边的 “暴力美学”)
[1. 核心思想](#1. 核心思想)
[2. C++ 代码实现](#2. C++ 代码实现)
[3. 时间复杂度分析](#3. 时间复杂度分析)
[4. 洛谷实战:采购特价商品](#4. 洛谷实战:采购特价商品)
[题目链接:P1744 采购特价商品](#题目链接:P1744 采购特价商品)
[四、SPFA 算法:Bellman-Ford 的 "智能优化版"](#四、SPFA 算法:Bellman-Ford 的 “智能优化版”)
[1. 核心思想](#1. 核心思想)
[2. 算法流程](#2. 算法流程)
[3. C++ 代码实现](#3. C++ 代码实现)
[4. 时间复杂度分析](#4. 时间复杂度分析)
[5. 洛谷实战:负环模板题](#5. 洛谷实战:负环模板题)
[题目链接:P3385 【模板】负环](#题目链接:P3385 【模板】负环)
[五、4 大算法横向对比:该选哪一个?](#五、4 大算法横向对比:该选哪一个?)
[选择算法的 3 个步骤](#选择算法的 3 个步骤)
[1. 例题 1:邮递员送信(往返最短路)](#1. 例题 1:邮递员送信(往返最短路))
[题目链接:P1629 邮递员送信](#题目链接:P1629 邮递员送信)
[2. 例题 2:最短路计数(统计最短路径条数)](#2. 例题 2:最短路计数(统计最短路径条数))
[题目链接:P1144 最短路计数](#题目链接:P1144 最短路计数)
前言
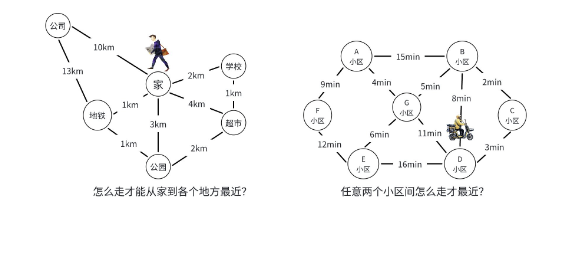
在图论的世界里,"最短路径" 绝对是最核心、最实用的问题之一。想象一下:外卖骑手规划最优配送路线、导航软件计算两地最短车程、网络数据寻找最快传输路径...... 这些场景的背后,都离不开单源最短路算法的支撑。
单源最短路,顾名思义,就是从图中的一个固定起点出发,找到通往其他所有顶点的最短路径(这里的 "最短" 可以是距离、时间、成本等带权指标)。看似简单的问题,在不同的图结构(有无负权边、有无负环)下,却有着截然不同的解决方案。
今天这篇文章,我会从基础概念入手,循序渐进地讲解 4 种经典的单源最短路算法 ------Dijkstra(常规版 + 堆优化版)、Bellman-Ford、SPFA,不仅会剖析每种算法的核心思想、适用场景,还会附上完整的 C++ 代码实现和洛谷实战例题,帮你从 "理解" 到 "会用",彻底搞定单源最短路问题!
一、前置知识:搞懂这些概念,算法学习不迷路
在正式讲解算法之前,我们先梳理几个必须掌握的基础概念,避免后续理解出现偏差:
1. 什么是 "带权路径长度"?
在带权图中,从顶点vi到顶点vj的路径上,所有边的权值之和,就是这条路径的带权路径长度。而我们要找的 "最短路径",就是带权路径长度最小的那条(如果存在多条路径的话)。
2. 单源最短路的核心场景分类
根据图的边权特性,单源最短路问题主要分为以下 3 种场景:
- 场景 1:图中所有边的权值都是非负数(最常见场景,如道路距离、传输延迟);
- 场景 2:图中存在负权边,但没有负环(如带有 "优惠""返利" 的成本计算);
- 场景 3:图中存在负环(此时可能不存在最短路径,因为可以无限绕负环减小路径长度)。
不同场景对应不同的算法,这也是我们选择算法的核心依据,后面会详细说明。
3. 关键定义:负环是什么?
负环(negative cycle) 是指一条边权之和为负数 的回路。例如,顶点A→B→C→A的边权之和为-5,这就是一个负环。
如果起点能到达负环,那么从起点到负环上的顶点就不存在最短路径 ------ 因为可以无限次绕负环,每次绕圈都会让路径长度减小,趋于负无穷。这一点在后续算法中会重点处理。
4. 松弛操作:所有最短路算法的核心
"松弛"(Relaxation)是最短路算法的核心操作,本质是 "寻找更短路径" 的过程。我们用dist[u] 表示从起点到顶点u的当前最短路径长度 ,对于边u→v(权值为w),如果满足:
cpp
dist[v] > dist[u] + w说明我们找到了一条从起点到v的更短路径(经过u到达v),此时就需要更新dist[v] = dist[u] + w。这个过程就叫做 "松弛"------ 可以理解为把v到起点的 "距离上限" 不断收紧,直到达到真正的最短距离。
所有单源最短路算法,本质上都是在不断进行松弛操作,只是松弛的顺序和策略不同。
二、Dijkstra 算法:非负权图的最优解
Dijkstra 算法是荷兰计算机科学家 Edsger W. Dijkstra 在 1956 年提出的,专门用于解决非负权图的单源最短路问题。算法基于 "贪心思想",核心逻辑是:每次选择当前距离起点最近的未确定最短路径的顶点,确定其最短路径,然后以该顶点为中介,松弛其邻接顶点的距离。
1. 常规版 Dijkstra:适合稠密图
核心思想
- 初始化:创建dist数组(存储起点到各顶点的最短距离),dist[起点] = 0,其余顶点的dist值设为无穷大(表示暂时未找到路径);创建st数组(标记顶点是否已确定最短路径),初始全为
false。- 迭代过程(共迭代
n-1次,n为顶点数):
- 在所有未确定最短路径的顶点中(st[u] = false),找到**dist[u]**最小的顶点
u;- 标记
u为已确定最短路径(st[u] = true);- 以
u为中介,对所有与u相邻的顶点v进行松弛操作:如果dist[v] > dist[u] + w(u→v),则更新dist[v]。- 结束:dist数组中存储的就是起点到各顶点的最短距离。
为什么能这么做?
因为图中所有边的权值都是非负数,一旦某个顶点被标记为 "已确定最短路径"(加入st数组),就意味着再也找不到比当前dist值更短的路径了 ------ 后续的松弛操作只会基于更长或相等的路径,无法更新该顶点的dist值。这就是贪心思想的合理性基础。
C++ 代码实现(邻接表版本)
python
#include <iostream>
#include <vector>
#include <climits>
using namespace std;
typedef pair<int, int> PII; // first: 邻接顶点,second: 边权
const int N = 1e4 + 10;
const int INF = INT_MAX;
int n, m, s; // n: 顶点数,m: 边数,s: 起点
vector<PII> edges[N]; // 邻接表存储图
long long dist[N]; // 存储最短距离(用long long避免溢出)
bool st[N]; // 标记是否已确定最短路径
void dijkstra() {
// 初始化dist数组
for (int i = 1; i <= n; ++i) {
dist[i] = INF;
}
dist[s] = 0;
// 迭代n-1次(最多需要确定n-1个顶点的最短路径)
for (int i = 1; i < n; ++i) {
// 步骤1:找到当前未确定最短路径且dist最小的顶点u
int u = 0;
for (int j = 1; j <= n; ++j) {
if (!st[j] && (u == 0 || dist[j] < dist[u])) {
u = j;
}
}
// 步骤2:标记u为已确定最短路径
st[u] = true;
// 步骤3:松弛u的所有邻接边
for (auto& t : edges[u]) {
int v = t.first;
int w = t.second;
if (dist[u] != INF && dist[v] > dist[u] + w) {
dist[v] = dist[u] + w;
}
}
}
// 输出结果
for (int i = 1; i <= n; ++i) {
if (dist[i] == INF) {
cout << INT_MAX << " "; // 无法到达
} else {
cout << dist[i] << " ";
}
}
}
int main() {
cin >> n >> m >> s;
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
edges[u].push_back({v, w}); // 有向边
}
dijkstra();
return 0;
}时间复杂度分析
- 外层循环:
n-1次迭代;- 内层找最小
dist的顶点:每次O(n);- 松弛操作:总共**
O(m)**(因为每个边只会被遍历一次)。
总体时间复杂度为**O(n² + m)** 。对于稠密图 (边数m ≈ n²),这个复杂度是可接受的,但对于稀疏图 (边数m ≈ n),O(n²)的时间会非常低效 ------ 这就需要堆优化版的 Dijkstra 算法。
2. 堆优化版 Dijkstra:稀疏图的救星
核心优化点
常规版 Dijkstra 的瓶颈在于**"每次找最小dist的顶点"** 需要**O(n)** 时间。我们可以用优先级队列(小根堆) 来维护未确定最短路径的顶点,这样每次取最小dist的顶点只需要**O(log n)**时间,从而大幅降低时间复杂度。
算法流程
- 初始化:
dist数组仍设为无穷大,dist[s] = 0;st数组初始全为false;创建小根堆,将(0, s)(第一个元素是dist值,第二个是顶点编号)入堆。- 迭代过程(堆不为空):
- 弹出堆顶元素
(dist_u,u)(即当前dist最小的顶点);- 如果
u已确定最短路径(st[u] = true),直接跳过(因为堆中可能存在旧的、非最优的dist值);- 标记
u为已确定最短路径(st[u] = true);- 松弛
u的所有邻接边:如果dist[v] > dist[u] + w,更新dist[v],并将(dist[v],v)入堆。- 结束:dist数组即为所求。
为什么堆中会有重复元素?
因为当某个顶点v的dist值被更新后,之前入堆的旧dist值还存在。但由于小根堆的特性,新的、更小的dist值会先被弹出处理,当旧值被弹出时,v已经被标记为st[v] = true,直接跳过即可,不影响结果。
C++ 代码实现(邻接表版本)
cpp
#include <iostream>
#include <vector>
#include <queue>
#include <cstring>
using namespace std;
typedef pair<int, int> PII; // first: dist值,second: 顶点编号
const int N = 1e5 + 10;
const int INF = 0x3f3f3f3f; // 常用无穷大表示
int n, m, s;
vector<PII> edges[N];
int dist[N];
bool st[N];
void dijkstra() {
// 初始化dist数组
memset(dist, 0x3f, sizeof dist);
dist[s] = 0;
// 小根堆:按dist值从小到大排序
priority_queue<PII, vector<PII>, greater<PII>> heap;
heap.push({0, s});
while (!heap.empty()) {
// 弹出当前dist最小的顶点
auto t = heap.top();
heap.pop();
int u = t.second;
int dist_u = t.first;
// 跳过已确定最短路径的顶点
if (st[u]) continue;
st[u] = true;
// 松弛邻接边
for (auto& edge : edges[u]) {
int v = edge.first;
int w = edge.second;
if (dist[v] > dist_u + w) {
dist[v] = dist_u + w;
heap.push({dist[v], v});
}
}
}
// 输出结果
for (int i = 1; i <= n; ++i) {
cout << dist[i] << " ";
}
}
int main() {
cin >> n >> m >> s;
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
edges[u].push_back({v, w});
}
dijkstra();
return 0;
}时间复杂度分析
- 堆操作 :每个边最多会导致一次入堆操作,堆的插入和弹出时间都是
O(log n),因此堆操作的总时间是**O(m log n)**;- 松弛操作 :每个边只会被处理一次,
O(m)。
总体时间复杂度为**O(m log n)** ,这对于稀疏图(m ≈ n)来说,比常规版的**O(n²)**高效得多,是实际应用中最常用的单源最短路算法。
注意事项
堆优化版 Dijkstra 同样只适用于非负权图!如果图中存在负权边,可能会导致顶点被多次入堆,甚至陷入死循环,最终无法得到正确结果。
3. 洛谷实战:单源最短路模板题
题目链接:P3371 【模板】单源最短路径(弱化版)
https://www.luogu.com.cn/problem/P3371
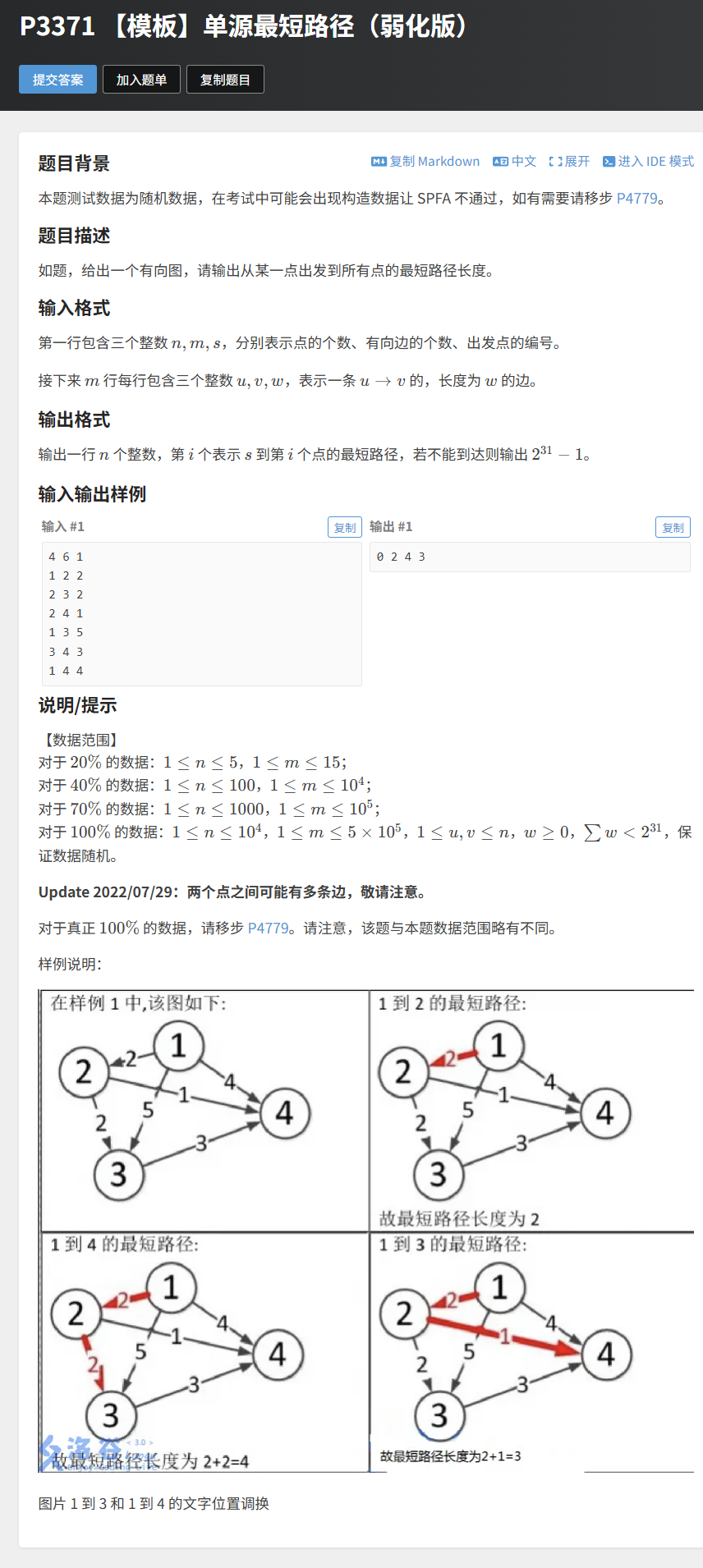
- 难度:★★
- 题意:给出有向图,输出从起点到所有顶点的最短路径长度,无法到达则输出
2^31 - 1。 - 数据范围:
n ≤ 1e4,m ≤ 5e4(适合常规版 Dijkstra)。
参考代码(直接复用常规版 Dijkstra)
cpp
#include <iostream>
#include <vector>
#include <climits>
using namespace std;
typedef pair<int, int> PII;
const int N = 1e4 + 10;
const int INF = INT_MAX;
int n, m, s;
vector<PII> edges[N];
long long dist[N];
bool st[N];
void dijkstra() {
for (int i = 1; i <= n; ++i) dist[i] = INF;
dist[s] = 0;
for (int i = 1; i < n; ++i) {
int u = 0;
for (int j = 1; j <= n; ++j) {
if (!st[j] && (u == 0 || dist[j] < dist[u])) u = j;
}
st[u] = true;
for (auto& t : edges[u]) {
int v = t.first, w = t.second;
if (dist[u] != INF && dist[v] > dist[u] + w) {
dist[v] = dist[u] + w;
}
}
}
for (int i = 1; i <= n; ++i) {
cout << (dist[i] == INF ? INF : dist[i]) << " ";
}
}
int main() {
cin >> n >> m >> s;
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
edges[u].push_back({v, w});
}
dijkstra();
return 0;
}题目链接:P4779 【模板】单源最短路径(标准版)
https://www.luogu.com.cn/problem/P4779
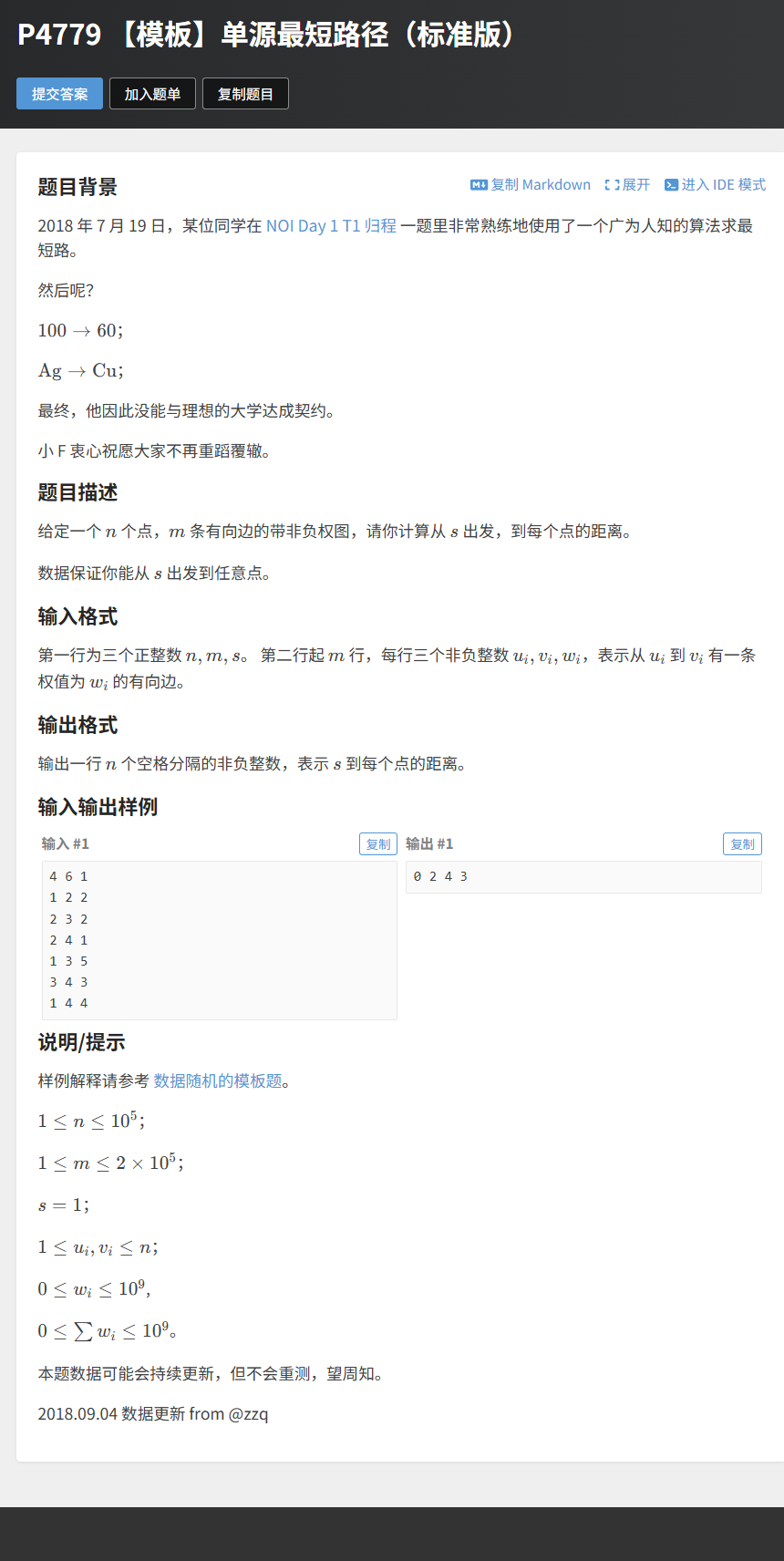
- 难度:★★
- 题意:与弱化版一致,但数据范围更大(
n ≤ 1e5,m ≤ 2e5),必须用堆优化版 Dijkstra。
参考代码(复用堆优化版 Dijkstra)
cpp
#include <iostream>
#include <vector>
#include <queue>
#include <cstring>
using namespace std;
typedef pair<int, int> PII;
const int N = 1e5 + 10;
const int INF = 0x3f3f3f3f;
int n, m, s;
vector<PII> edges[N];
int dist[N];
bool st[N];
void dijkstra() {
memset(dist, 0x3f, sizeof dist);
dist[s] = 0;
priority_queue<PII, vector<PII>, greater<PII>> heap;
heap.push({0, s});
while (!heap.empty()) {
auto t = heap.top();
heap.pop();
int u = t.second, dist_u = t.first;
if (st[u]) continue;
st[u] = true;
for (auto& edge : edges[u]) {
int v = edge.first, w = edge.second;
if (dist[v] > dist_u + w) {
dist[v] = dist_u + w;
heap.push({dist[v], v});
}
}
}
for (int i = 1; i <= n; ++i) {
cout << dist[i] << " ";
}
}
int main() {
cin >> n >> m >> s;
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
edges[u].push_back({v, w});
}
dijkstra();
return 0;
}三、Bellman-Ford 算法:处理负权边的 "暴力美学"
Dijkstra 算法虽然高效,但无法处理负权边 ------ 一旦出现负权边,其 "标记顶点为已确定最短路径" 的贪心策略就会失效。而 Bellman-Ford 算法则不同,它通过**"暴力松弛所有边"** 的方式,不仅能处理负权边,还能判断图中是否存在负环。
1. 核心思想
Bellman-Ford 算法的核心是 "重复松弛所有边",直到没有边可以被松弛为止。其理论依据是:在一个有n个顶点的图中,最短路径最多包含n-1条边(如果包含n条边,说明存在回路,而回路的权值之和非负时可以去掉,负权回路则不存在最短路径)。因此,最多需要进行n-1轮松弛操作,就能得到所有顶点的最短路径。
算法流程
- 初始化 :
dist数组设为无穷大,dist[s] = 0;- 迭代过程 (共
n-1轮):
- 每一轮遍历所有边
u→v(权值w);- 对每条边进行松弛操作:如果dist[v] > dist[u] + w,则更新dist[v];
- 优化:如果某一轮没有任何边被松弛,说明所有最短路径已经确定,可以提前退出;
- 负环判断 :进行第
n轮松弛操作,如果仍有边可以被松弛,说明图中存在负环(因为n-1轮后已经应该得到最短路径,第n轮还能松弛说明存在可以无限缩短路径的负环)。
为什么能处理负权边?
因为 Bellman-Ford 算法没有 "标记已确定最短路径" 的步骤,即使某个顶点的dist值已经很小,后续仍可能通过负权边更新它。这种 "不设限" 的松弛策略,使得它能适应负权边的场景。
2. C++ 代码实现
cpp
#include <iostream>
#include <vector>
#include <climits>
using namespace std;
typedef pair<int, int> PII;
const int N = 1e4 + 10;
const int INF = INT_MAX;
int n, m, s;
vector<PII> edges[N]; // edges[u]存储(u的邻接顶点v, 边权w)
int dist[N];
void bellman_ford() {
// 初始化dist数组
for (int i = 1; i <= n; ++i) {
dist[i] = INF;
}
dist[s] = 0;
// 进行n-1轮松弛
for (int i = 1; i < n; ++i) {
bool flag = false; // 标记本轮是否有边被松弛
for (int u = 1; u <= n; ++u) {
if (dist[u] == INF) continue; // u不可达,跳过
for (auto& t : edges[u]) {
int v = t.first;
int w = t.second;
if (dist[v] > dist[u] + w) {
dist[v] = dist[u] + w;
flag = true;
}
}
}
if (!flag) break; // 没有边被松弛,提前退出
}
// 负环判断(可选)
bool has_negative_cycle = false;
for (int u = 1; u <= n; ++u) {
if (dist[u] == INF) continue;
for (auto& t : edges[u]) {
int v = t.first;
int w = t.second;
if (dist[v] > dist[u] + w) {
has_negative_cycle = true;
break;
}
}
if (has_negative_cycle) break;
}
// 输出结果
if (has_negative_cycle) {
cout << "图中存在负环,部分顶点无最短路径" << endl;
} else {
for (int i = 1; i <= n; ++i) {
cout << (dist[i] == INF ? INF : dist[i]) << " ";
}
}
}
int main() {
cin >> n >> m >> s;
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
edges[u].push_back({v, w});
}
bellman_ford();
return 0;
}3. 时间复杂度分析
- 外层循环 :
n-1轮;- 内层循环 :每轮遍历所有
m条边。
总体时间复杂度为**O(nm)** 。这个复杂度在n和m较大时(如n=1e4,m=1e5)会非常低效,因此 Bellman-Ford 算法通常用于处理小规模图 或需要判断负环的场景。
4. 洛谷实战:采购特价商品
题目链接:P1744 采购特价商品
https://www.luogu.com.cn/problem/P1744
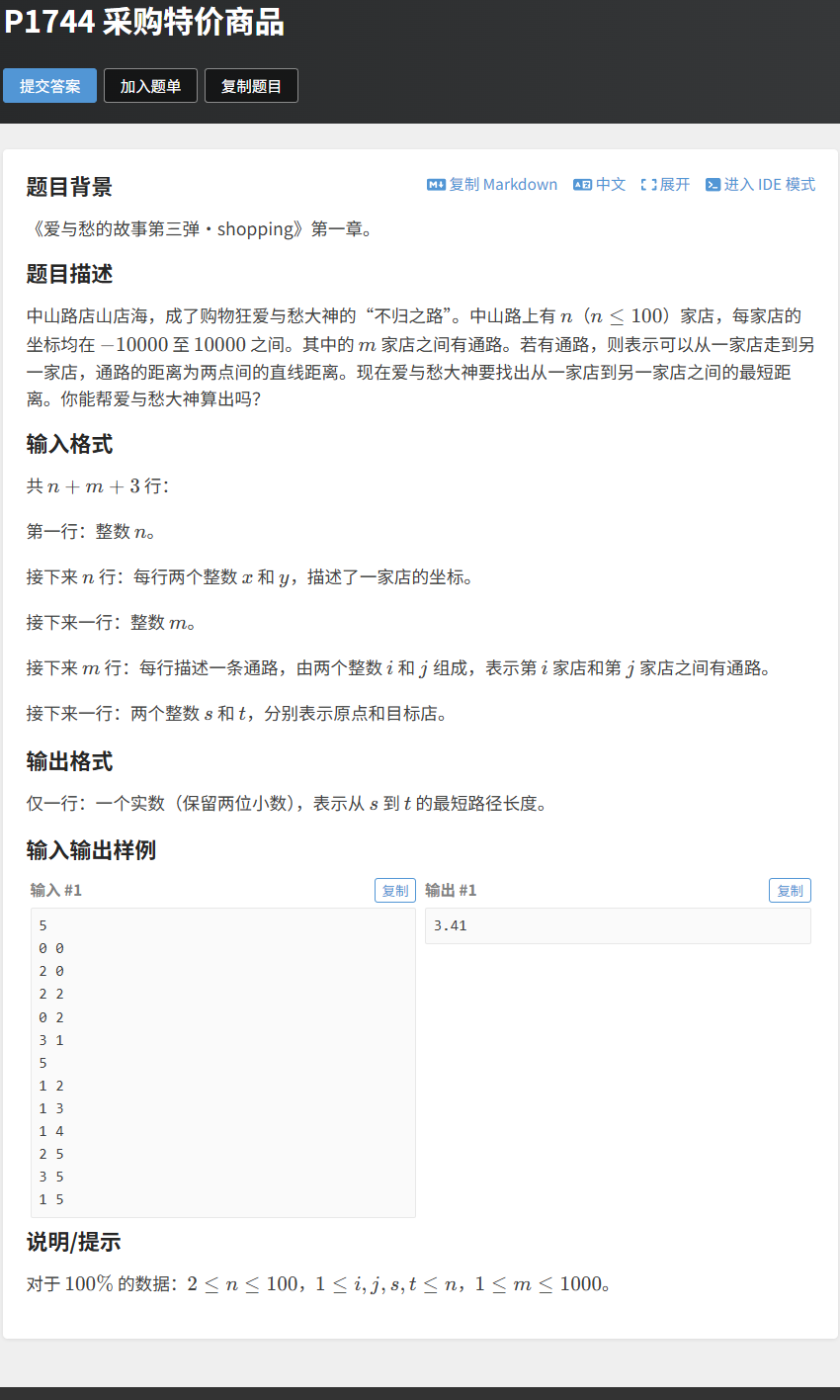
- 难度:★★
- 题意:给出
n家店的坐标,m条通路(无向边),通路的距离为两点间的直线距离。求从起点s到终点t的最短路径长度(保留两位小数)。 - 思路:这是一个无向带权图,边权为直线距离(非负),但数据范围较小(
n ≤ 100),适合用 Bellman-Ford 算法实现。
参考代码
cpp
#include <iostream>
#include <cmath>
#include <cstring>
using namespace std;
const int N = 110, M = 1010;
const double INF = 1e10;
int n, m, s, t;
double x[N], y[N]; // 每家店的坐标
// 存储边:a和b是店的编号,c是边权(直线距离)
struct Edge {
int a, b;
double c;
} edges[M];
double dist[N];
// 计算两点间的直线距离
double calc(int i, int j) {
double dx = x[i] - x[j];
double dy = y[i] - y[j];
return sqrt(dx * dx + dy * dy);
}
void bellman_ford() {
// 初始化dist数组
for (int i = 1; i <= n; ++i) {
dist[i] = INF;
}
dist[s] = 0;
// 进行n-1轮松弛
for (int i = 1; i < n; ++i) {
bool flag = false;
for (int j = 1; j <= m; ++j) {
int a = edges[j].a;
int b = edges[j].b;
double c = edges[j].c;
// 无向边,双向松弛
if (dist[a] + c < dist[b]) {
dist[b] = dist[a] + c;
flag = true;
}
if (dist[b] + c < dist[a]) {
dist[a] = dist[b] + c;
flag = true;
}
}
if (!flag) break;
}
// 输出结果(保留两位小数)
printf("%.2lf\n", dist[t]);
}
int main() {
cin >> n;
for (int i = 1; i <= n; ++i) {
cin >> x[i] >> y[i];
}
cin >> m;
for (int i = 1; i <= m; ++i) {
int a, b;
cin >> a >> b;
edges[i].a = a;
edges[i].b = b;
edges[i].c = calc(a, b);
}
cin >> s >> t;
bellman_ford();
return 0;
}四、SPFA 算法:Bellman-Ford 的 "智能优化版"
Bellman-Ford 算法的**O(nm)** 复杂度实在太高,而我们观察到:只有上一轮被松弛过的顶点,其邻接边才有可能在当前轮松弛其他顶点。基于这个观察,我们可以用队列来维护 "待松弛的顶点",从而减少不必要的松弛操作 ------ 这就是 SPFA 算法(Shortest Path Faster Algorithm)。
1. 核心思想
SPFA 算法本质是 Bellman-Ford 算法的队列优化,核心优化点:
- 用队列存储需要进行松弛操作的顶点;
- 只有当顶点
u的dist值被更新后,才将其入队(如果不在队列中);- 每次从队列中取出顶点
u,对其邻接边进行松弛操作。
这种优化使得 SPFA 算法在大多数情况下的时间复杂度远低于**O(nm)** (实际约为O(km),k是每个顶点入队的平均次数,通常k ≤ 2),成为处理有负权边但无负环的图的首选算法。
2. 算法流程
- 初始化 :
dist数组设为无穷大,dist[s] = 0;创建队列,将起点s入队;创建st数组(标记顶点是否在队列中),st[s] = true。- 迭代过程 (队列不为空):
- 取出队头顶点
u,标记st[u] = false(表示已出队);- 遍历
u的所有邻接边u→v(权值w);- 松弛操作:如果dist[v] > dist[u] + w,更新dist[v];
- 如果
v不在队列中(st[v] = false),将v入队,标记st[v] = true。- 负环判断 (可选):创建
cnt数组,记录每个顶点的入队次数。如果某个顶点v的入队次数cnt[v] ≥ n,说明存在负环(因为最短路径最多包含n-1条边,入队n次意味着绕了至少一次环,且是负环)。
3. C++ 代码实现
cpp
#include <iostream>
#include <vector>
#include <queue>
#include <climits>
using namespace std;
typedef pair<int, int> PII;
const int N = 1e4 + 10;
const int INF = INT_MAX;
int n, m, s;
vector<PII> edges[N];
int dist[N];
bool st[N]; // 标记是否在队列中
int cnt[N]; // 记录入队次数(用于负环判断)
bool spfa() {
// 初始化
for (int i = 1; i <= n; ++i) {
dist[i] = INF;
st[i] = false;
cnt[i] = 0;
}
dist[s] = 0;
queue<int> q;
q.push(s);
st[s] = true;
cnt[s] = 1;
while (!q.empty()) {
int u = q.front();
q.pop();
st[u] = false;
// 松弛邻接边
for (auto& t : edges[u]) {
int v = t.first;
int w = t.second;
if (dist[u] != INF && dist[v] > dist[u] + w) {
dist[v] = dist[u] + w;
if (!st[v]) {
q.push(v);
st[v] = true;
cnt[v]++;
// 入队次数≥n,存在负环
if (cnt[v] >= n) {
return true;
}
}
}
}
}
return false; // 无负环
}
int main() {
cin >> n >> m >> s;
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
edges[u].push_back({v, w});
}
bool has_negative_cycle = spfa();
if (has_negative_cycle) {
cout << "图中存在负环,部分顶点无最短路径" << endl;
} else {
for (int i = 1; i <= n; ++i) {
cout << (dist[i] == INF ? INF : dist[i]) << " ";
}
}
return 0;
}4. 时间复杂度分析
- 平均情况 :
O(km),k通常是很小的常数(如 2~3);- 最坏情况 :
O(nm)(与 Bellman-Ford 相同,如存在负环时)。
5. 洛谷实战:负环模板题
题目链接:P3385 【模板】负环
https://www.luogu.com.cn/problem/P3385
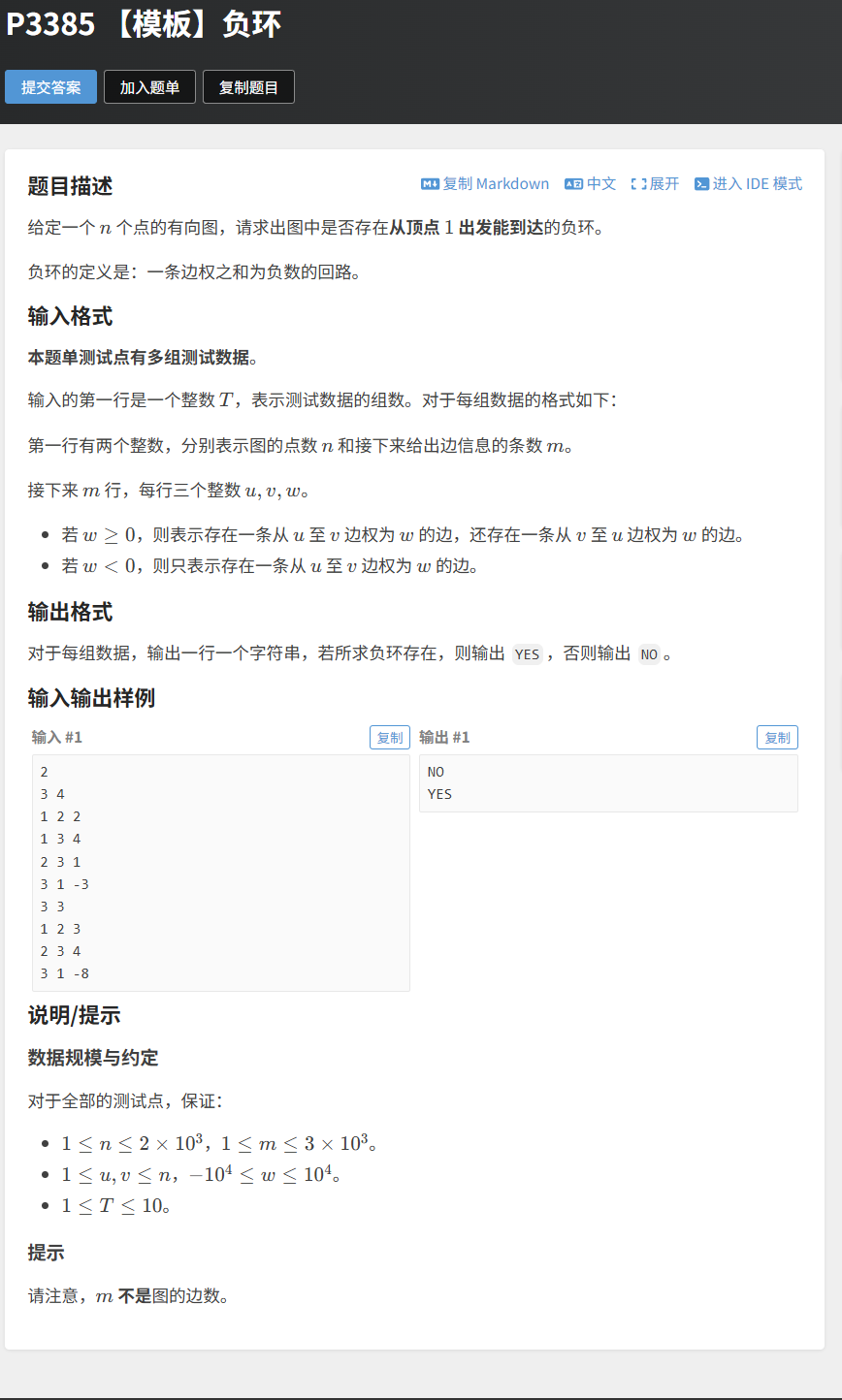
- 难度:★★
- 题意:给定有向图,判断是否存在从顶点 1 出发能到达的负环。
- 思路:用 SPFA 算法的负环判断功能,通过
cnt数组记录入队次数,若cnt[v] ≥ n则存在负环。
参考代码
cpp
#include <iostream>
#include <vector>
#include <queue>
#include <cstring>
using namespace std;
typedef pair<int, int> PII;
const int N = 2e3 + 10;
int n, m;
vector<PII> edges[N];
int dist[N];
bool st[N];
int cnt[N];
bool spfa() {
memset(dist, 0x3f, sizeof dist);
memset(st, false, sizeof st);
memset(cnt, 0, sizeof cnt);
queue<int> q;
q.push(1);
dist[1] = 0;
st[1] = true;
cnt[1] = 1;
while (!q.empty()) {
int u = q.front();
q.pop();
st[u] = false;
for (auto& t : edges[u]) {
int v = t.first;
int w = t.second;
if (dist[v] > dist[u] + w) {
dist[v] = dist[u] + w;
if (!st[v]) {
q.push(v);
st[v] = true;
cnt[v]++;
if (cnt[v] >= n) {
return true;
}
}
}
}
}
return false;
}
int main() {
int T;
cin >> T;
while (T--) {
cin >> n >> m;
// 清空邻接表
for (int i = 1; i <= n; ++i) {
edges[i].clear();
}
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
edges[u].push_back({v, w});
// 若w≥0,是无向边,添加反向边
if (w >= 0) {
edges[v].push_back({u, w});
}
}
if (spfa()) {
cout << "YES" << endl;
} else {
cout << "NO" << endl;
}
}
return 0;
}五、4 大算法横向对比:该选哪一个?
学到这里,你可能会疑惑:面对具体问题时,该如何选择合适的算法?下面这张表格,从核心特性、适用场景、时间复杂度等方面进行了全面对比,帮你快速决策:
| 算法 | 核心思想 | 负权边支持 | 负环检测 | 时间复杂度 | 适用场景 |
|---|---|---|---|---|---|
| 常规版 Dijkstra | 贪心 + 松弛,标记已确定顶点 | 不支持 | 不支持 | O(n² + m) | 稠密图(非负权) |
| 堆优化版 Dijkstra | 小根堆优化找最小 dist 顶点 | 不支持 | 不支持 | O(m log n) | 稀疏图(非负权)、大规模图 |
| Bellman-Ford | 暴力松弛所有边 n-1 轮 | 支持 | 支持 | O(nm) | 小规模图、需要检测负环 |
| SPFA | 队列优化 Bellman-Ford | 支持 | 支持 | 平均 O (km),最坏 O (nm) | 有负权边的图、需要检测负环 |
选择算法的 3 个步骤
- 先看图中是否有负权边 :
- 无负权边:优先选堆优化版 Dijkstra(稀疏图)或常规版 Dijkstra(稠密图);
- 有负权边:进入下一步;
- 再看是否需要检测负环 :
- 需要检测负环:选 Bellman-Ford 或 SPFA;
- 确定无负环:选 SPFA(效率更高);
- 结合数据规模 :
- 数据规模大(n≥1e4,m≥1e5):只能选堆优化版 Dijkstra 或 SPFA;
- 数据规模小(n≤1e3,m≤1e4):可任选,Bellman-Ford 实现更简单。
六、进阶实战:单源最短路的经典变形问题
除了模板题,单源最短路还有很多经典变形问题,下面我们来看两个高频例题,帮你拓宽解题思路。
1. 例题 1:邮递员送信(往返最短路)
题目链接:P1629 邮递员送信
https://www.luogu.com.cn/problem/P1629
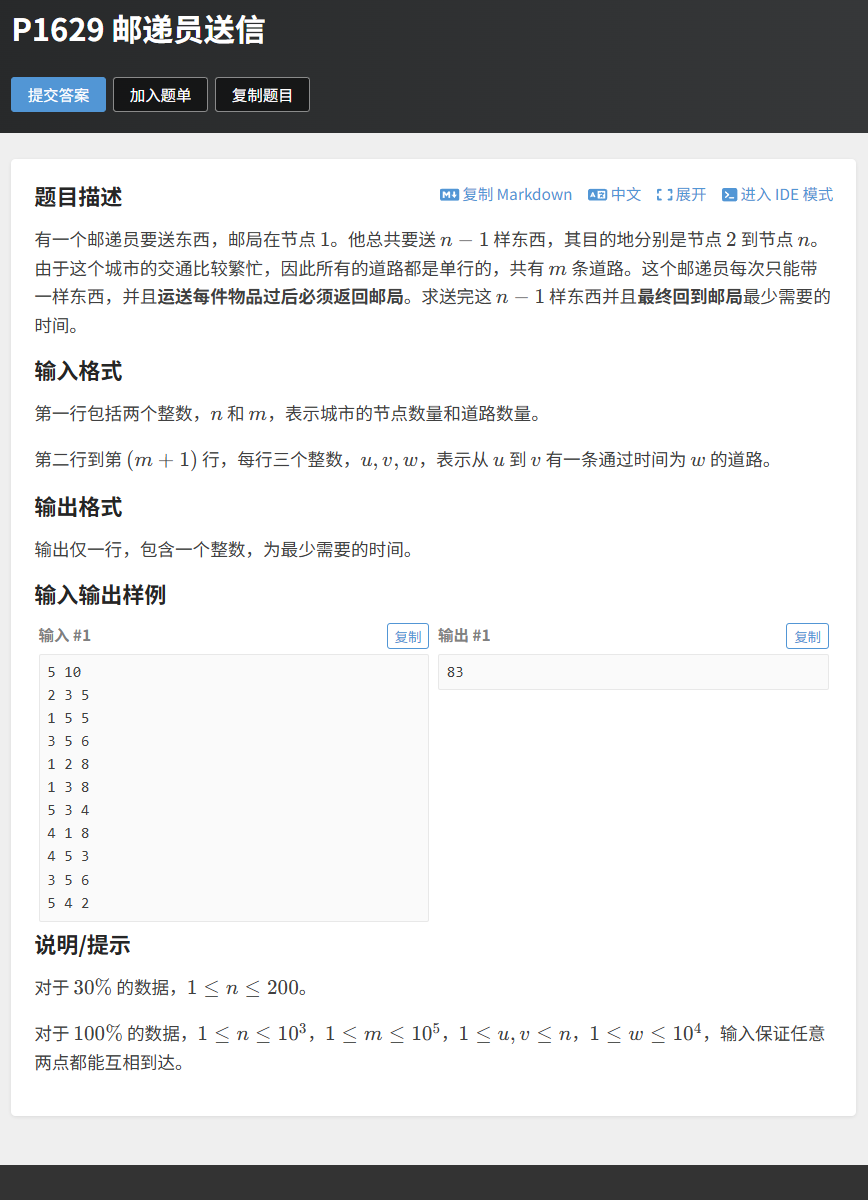
- 难度:★★
- 题意:有向图,邮递员从邮局(顶点 1)出发,送完所有目的地(顶点 2~n)后返回邮局,求最少需要的时间。
- 核心思路:
- 正向最短路:从顶点 1 到其他所有顶点的最短距离(送件路程);
- 反向最短路:从其他所有顶点到顶点 1 的最短距离(返程路程)------ 这里可以通过 "建反图" 来实现:将原图中所有边的方向反转,然后求顶点 1 到其他所有顶点的最短距离,即为原图中其他顶点到顶点 1 的最短距离。
- 解法:用 Dijkstra 算法分别计算正向和反向最短路,求和即为答案。
参考代码
cpp
#include <iostream>
#include <cstring>
using namespace std;
const int N = 1e3 + 10;
const int INF = 0x3f3f3f3f;
int n, m;
int g[N][N]; // 原图
int rev_g[N][N]; // 反图
int dist[N];
bool st[N];
// Dijkstra算法,graph为图,计算从s到所有顶点的最短距离
void dijkstra(int graph[][N]) {
memset(dist, 0x3f, sizeof dist);
memset(st, false, sizeof st);
dist[1] = 0;
for (int i = 1; i <= n; ++i) {
// 找未确定最短路径且dist最小的顶点
int u = 0;
for (int j = 1; j <= n; ++j) {
if (!st[j] && (u == 0 || dist[j] < dist[u])) {
u = j;
}
}
st[u] = true;
// 松弛操作
for (int v = 1; v <= n; ++v) {
if (dist[v] > dist[u] + graph[u][v]) {
dist[v] = dist[u] + graph[u][v];
}
}
}
}
int main() {
cin >> n >> m;
// 初始化原图和反图
memset(g, 0x3f, sizeof g);
memset(rev_g, 0x3f, sizeof rev_g);
for (int i = 1; i <= n; ++i) {
g[i][i] = 0;
rev_g[i][i] = 0;
}
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
g[u][v] = min(g[u][v], w); // 原图:u→v
rev_g[v][u] = min(rev_g[v][u], w); // 反图:v→u(对应原图u→v)
}
// 计算正向最短路(送件)
dijkstra(g);
int res = 0;
for (int i = 1; i <= n; ++i) {
res += dist[i];
}
// 计算反向最短路(返程)
dijkstra(rev_g);
for (int i = 1; i <= n; ++i) {
res += dist[i];
}
cout << res << endl;
return 0;
}2. 例题 2:最短路计数(统计最短路径条数)
题目链接:P1144 最短路计数
- 难度:★★★
- 题意:无向无权图,求从顶点 1 到其他每个顶点的最短路条数(答案对 100003 取模)。
- 核心思路:
- 由于是无权图,最短路长度就是边的条数,可以用 BFS 求解;
- 动态规划 :设**f[v]**为从顶点 1 到
v的最短路条数,**dist[v]**为最短路长度; - 状态转移 :当通过顶点
u松弛到v时,若dist[v] == dist[u] + 1,则f[v] = (f[v] + f[u]) % MOD;若dist[v] > dist[u] + 1,则更新dist[v] = dist[u] + 1,f[v] = f[u]。
- 解法:BFS + 动态规划。
参考代码
cpp
#include <iostream>
#include <queue>
#include <vector>
#include <cstring>
using namespace std;
const int N = 1e6 + 10;
const int MOD = 100003;
const int INF = 0x3f3f3f3f;
int n, m;
vector<int> edges[N];
int dist[N];
int f[N]; // f[v]:从1到v的最短路条数
void bfs() {
memset(dist, 0x3f, sizeof dist);
queue<int> q;
dist[1] = 0;
f[1] = 1;
q.push(1);
while (!q.empty()) {
int u = q.front();
q.pop();
for (int v : edges[u]) {
if (dist[v] > dist[u] + 1) {
dist[v] = dist[u] + 1;
f[v] = f[u];
q.push(v);
} else if (dist[v] == dist[u] + 1) {
f[v] = (f[v] + f[u]) % MOD;
}
}
}
}
int main() {
scanf("%d%d", &n, &m);
for (int i = 0; i < m; ++i) {
int a, b;
scanf("%d%d", &a, &b);
edges[a].push_back(b);
edges[b].push_back(a);
}
bfs();
for (int i = 1; i <= n; ++i) {
printf("%d\n", f[i]);
}
return 0;
}总结
单源最短路是图论中的核心知识点,也是算法面试和竞赛中的高频考点。通过本文的学习,你应该已经掌握了 4 种经典算法的原理、实现和适用场景,以及常见的实战例题。
算法学习的关键在于 "理解 + 实践",希望你能多动手敲代码,多做练习题,把这些算法真正内化为自己的技能。如果遇到问题,欢迎在评论区交流讨论!