目录
1.摘要
路径规划是确保无人机(UAV)安全飞行的关键优化问题,尤其在多无人机协同飞行的场景中,由于复杂环境、不同任务需求和无人机固有的机动性限制,问题更具挑战性。本文提出了一种多无人机协同路径规划模型,该模型不仅考虑了常见的路径长度最小化、机动性限制和避碰要求,还考虑了无人机之间的通信需求及飞行环境中障碍物对通信质量的影响。基于此,设计了相应的目标函数,并提出了一种改进粒子群算法(PSO)算法来解决该路径规划问题,该算法结合了动态多群体粒子群算法(DMSPSO)和综合学习粒子群算法(CLPSO)的思想,提出的CL-DMSPSO算法在性能上进行了优化,验证了其在复杂多模态函数上的有效性和优越性。
2.无人机路径规划模型
多无人机协同路径规划目标是为每架无人机在满足机动性、避碰和通信等约束的基础上,规划最短路径。约束包括航点转弯角度、避障、避碰及保持通信连接。路径表示假设无人机飞行高度恒定,路径由多个航点组成,约束分为基于航点几何关系的路径长度和转弯限制,以及需要细分路径段的避碰和通信要求。
路径长度:
f L = 1 − ( x i N − x i 1 ) 2 + ( y i N − y i 1 ) 2 Σ j = 2 N ( x i j − x i j − 1 ) 2 + ( y i j − y i j − 1 ) 2 f_{L}=1-\frac{\sqrt{\left(x_{iN}-x_{i1}\right)^{2}+\left(y_{iN}-y_{i1}\right)^{2}}}{\Sigma_{j=2}^{N}\sqrt{\left(x_{ij}-x_{ij-1}\right)^{2}+\left(y_{ij}-y_{ij-1}\right)^{2}}} fL=1−Σj=2N(xij−xij−1)2+(yij−yij−1)2 (xiN−xi1)2+(yiN−yi1)2
其中,分子表示无人机 i i i从起点到目的地的直线距离,分母为实际路径长度。
转弯角度:
f T = { 1 , ∃ θ i j > θ m a x 0 , o t h e r w i s e f_T=\begin{cases}1,&\quad\exists\theta_{ij}>\theta_{max}\\0,&\quad\mathrm{otherwise}&\end{cases} fT={1,0,∃θij>θmaxotherwise
θ i j = arccos ( ( x i j − x i j − 1 , y i j − y i j − 1 ) ⋅ ( x i j + 1 − x i j , y i j + 1 − y i j ) T ∥ ( x i j − x i j − 1 , y i j − y i j − 1 ) ⋅ ( x i j + 1 − x i j , y i j + 1 − y i j ) ∥ ) \theta_{ij}=\arccos(\frac{(x_{ij}-x_{ij-1},y_{ij}-y_{ij-1})\cdot(x_{ij+1}-x_{ij},y_{ij+1}-y_{ij})^{T}}{\left\|(x_{ij}-x_{ij-1},y_{ij}-y_{ij-1})\cdot(x_{ij+1}-x_{ij},y_{ij+1}-y_{ij})\right\|}) θij=arccos(∥(xij−xij−1,yij−yij−1)⋅(xij+1−xij,yij+1−yij)∥(xij−xij−1,yij−yij−1)⋅(xij+1−xij,yij+1−yij)T)
为确保无人机安全飞行,路径规划中需避开障碍物。将路径划分为多个评估点,若某评估点位于障碍物内,则该路径被视为不安全,并在目标函数中增加惩罚函数,确保避碰约束得到满足。
无人机在飞行过程中需保持通信连接,即任意两架无人机之间始终存在至少一条通信路径。由于障碍物可能阻挡视距(LoS)链路,从而影响通信质量,因此需要区分视距(LoS)和非视距(NLoS)传播环境。大尺度通道系数:
β ( d ) = { β 0 d − α , LoS environment k β 0 d − α , NLoS environment \left.\beta\left(d\right)=\left\{\begin{array}{cc}{\beta_{0}d^{-\alpha},}&{\text{LoS environment}}\\{k\beta_{0}d^{-\alpha},}&{\text{NLoS environment}}\end{array}\right.\right. β(d)={β0d−α,kβ0d−α,LoS environmentNLoS environment
信噪比:
S N R = β ( d ) 10 P t − P n 10 SNR=\beta(d)10^{\frac{P_t-P_n}{10}} SNR=β(d)1010Pt−Pn
3.CL-DMSPSO算法
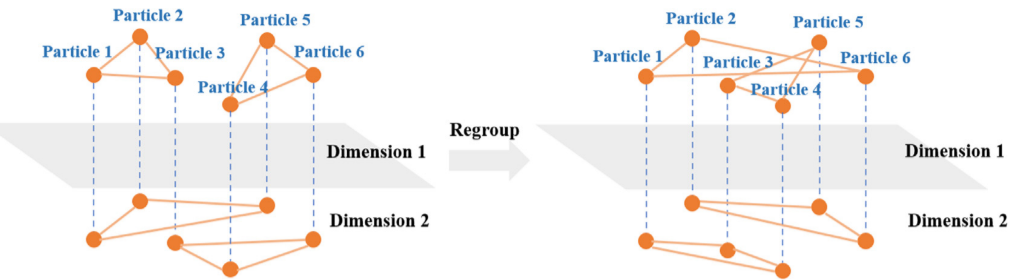
CL-DMSPSO算法将粒子分为多个小型子群体,每个维度对应一个子群体,并通过更新公式调整粒子的速度和位置:
v l d ← w ∗ v l d + c 1 ∗ r a n d 1 l d ∗ ( p b e s t l d − x l d ) + c 2 ∗ r a n d 2 l d ∗ ( l b e s t l d − x l d ) \begin{aligned}v_{l}^{d}&\leftarrow w*v_{l}^{d}+c_{1}*rand1_{l}^{d}*\left(pbest_{l}^{d}-x_{l}^{d}\right)\\&+c_{2}*rand2_{l}^{d}*\left(lbest_{l}^{d}-x_{l}^{d}\right)\end{aligned} vld←w∗vld+c1∗rand1ld∗(pbestld−xld)+c2∗rand2ld∗(lbestld−xld)
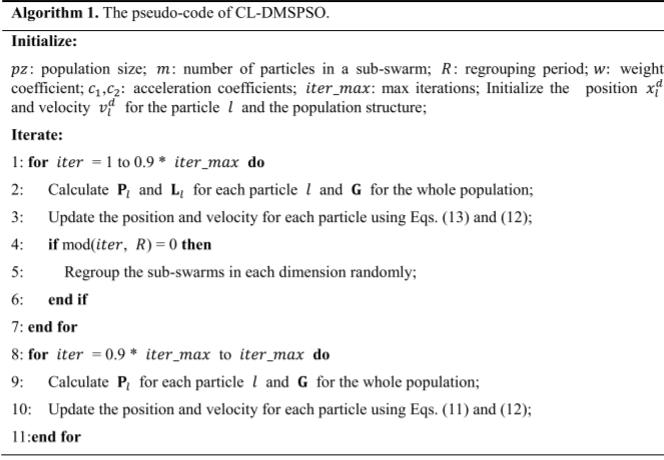
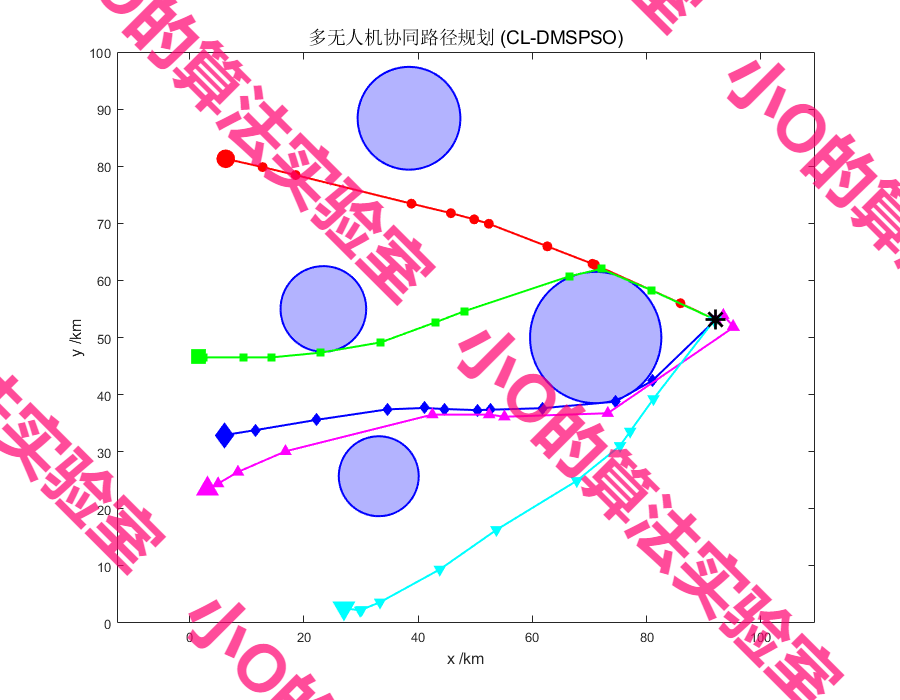
CL-DMSPSO算法的多无人机路径规划方法将CL-DMSPSO作为单个无人机的路径求解算法,每个粒子表示无人机的路径。通过迭代更新路径,结合通信和分离维护成本,找到符合安全与协作要求的飞行路径。
4.结果展示
5.参考文献
1 Xu L, Cao X, Du W, et al. Cooperative path planning optimization for multiple UAVs with communication constraintsJ. Knowledge-Based Systems, 2023, 260: 110164.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx