AlarmProtothread 在完整保留 Protothread
原有 API 语义的前提下,对其时间模型进行了修改。
Protothread 采用固定 1 ms tick 的协作式调度机制,本质上是一种低时间分辨率的时间片模型,难以准确描述或调度 µs 级事件。AlarmProtothread 引入基于硬件 Alarm的精确定时机制,使协程调度不再依赖统一的毫秒节拍,而是由事件触发驱动,从而在保持轻量协程模型的同时,支持更高时间精度的异步控制逻辑。
例子
例1: 产生us精度的pwm
如果AlarmProtothread的Run函数不能一次执行完,则它不允许有栈变量
c
/**
* LedPt0的Run完整执行周期是80us
* 大多数情况,遇到PT_开头的函数Run函数会直接返回
* LedPt0执行流程
* 20us
* 翻转
* 60us
* 翻转
*/
class LedPt0 : public AlarmProtothread {
void Init() {
AT_println("LedPt0 init");
ledp0cnt=0;
}
bool Run() {
static uint32_t last_us=mi_hw_alarm_get_tick_us();
static uint32_t now = mi_hw_alarm_get_tick_us();
WHILE(1){
PT_DELAY(20);
gpio_xor_mask(1u << LED_PIN);
PT_DELAY(60);
gpio_xor_mask(1u << LED_PIN);
now = mi_hw_alarm_get_tick_us();
dif_led0_us=now-last_us;
last_us=now;
}
PT_END();
}
};例2: 协程间通讯
在通信机制上,AlarmProtothread 同时提供了 两种相互独立的通信路径:
一是协程内部的 m_indata / m_outdata 数据通道,二是基于外部 EventBus 的事件通信机制。
m_indata / m_outdata 属于 协程本体的最小通信接口,用于描述单个协程在一次调度周期内的输入与输出状态,其生命周期与协程实例严格绑定。
EventBus 则是 完全独立于协程实现之外的事件分发系统,用于在不同协程或外部模块之间建立松耦合的消息传递关系。两者在语义、作用域与生命周期上彼此独立,可单独使用。
外部EventBus通讯
订阅发布---1ms发布一条消息
c
#include "pico/stdlib.h"
#include "./lib/AtShell.h"
#include "./user/user_atshell.h"
#include "AlarmProtothread.h"
#include "./common/EventBus.h"
using namespace Common;
class LedPt0 : public AlarmProtothread {
void Init() {
AT_println("LedPt0 init");
}
bool Run() {
static uint32_t cnt = 0;
WHILE(1){
//延时1000us
PT_DELAY(1000);
cnt++;
//发布消息
EventPublish(EventType::PUSH_DATA, &cnt);
}
PT_END();
}
};
class LedPt1 : public AlarmProtothread {
void Init() {
AT_println("LedPt1 init");
//订阅
EventSubscribe(EventType::PUSH_DATA, this, &LedPt1::OnRecvEvent);
}
void OnRecvEvent(EventType eventType, void* data){
if(eventType==EventType::PUSH_DATA){
uint32_t cnt = *(uint32_t*)data;
//实际应是写队列,在主循环中处理
AT_println("LedPt0 OnRecvEvent cnt=%d,%d",cnt, to_ms_since_boot(get_absolute_time()));
return;
}
}
bool Run() {
PtOsDelay(20000);
return true;
}
};
LedPt0 ledPt0;
LedPt1 ledPt1;
static int ptTest(int argc, char** argv) {
//下次进定时器中断的时间(us)
AT_println("M_next_tick=%u", AlarmProtothread::M_next_tick);
return 0;
}
/* ================= main ================= */
int main() {
stdio_init_all();
AT_SHELL_EXPORT(test02, "ptTest", ptTest);
user_atShell_init();
AlarmProtothread::PtInit();
AlarmProtothread::AllStart();
/* 主循环:统一发送 Shell 输出 */
while (true) {
user_atShell_loop();
tight_loop_contents();
}
}m_indata/m_outdata 通讯
ledPt0 每隔1s发送一条消息给 ledPt1
c
#include "pico/stdlib.h"
#include "./lib/AtShell.h"
#include "./user/user_atshell.h"
#include "AlarmProtothread.h"
class LedPt0 : public AlarmProtothread {
void Init() {
AT_println("LedPt0 init");
}
bool Run() {
static uint32_t cnt = 0;
WHILE(1){
PT_DELAY(1000000);
cnt++;
//1s 给LedPt1发一条消息
//协程索引的顺序就是协程变量声明的顺序
AlarmProtothread::PushIndata(AlarmProtothread::M_pts[1], cnt);
}
PT_END();
}
};
class LedPt1 : public AlarmProtothread {
void Init() {
AT_println("LedPt1 init");
}
bool Run() {
WHILE(1) {
//等待LedPt0发消息,m_indata为0,则直接返回
PT_WAIT_UNTIL(GetInData());
//PopInData()会清零m_indata
AT_println("ledPt1 get data %d\n",PopInData());
PT_DELAY(100);
}
PT_END();
}
};
LedPt0 ledPt0;
LedPt1 ledPt1;
static int ptTest(int argc, char** argv) {
//下次进定时器中断的时间(us)
AT_println("M_next_tick=%u", AlarmProtothread::M_next_tick);
return 0;
}
/* ================= main ================= */
int main() {
stdio_init_all();
AT_SHELL_EXPORT(test02, "ptTest", ptTest);
user_atShell_init();
AlarmProtothread::PtInit();
AlarmProtothread::AllStart();
/* 主循环:统一发送 Shell 输出 */
while (true) {
user_atShell_loop();
tight_loop_contents();
}
}目录结构
bash
PS D:\workspace\gitee\2\ming_picoman> tree /F
卷 新加卷 的文件夹 PATH 列表
卷序列号为 1E8A-2CFF
D:.
│ .gitignore
│ CMakeLists.txt
│ copy_uf2.bat
│ diagram.json
│ pico_sdk_import.cmake
│ README.md
│ wokwi.toml
│
└─src
│ AlarmProtothread.cpp
│ AlarmProtothread.h
│ main.cpp
│ mi_hw_alarm.cpp
│ mi_hw_alarm.h
│
├─common
│ LogUtils.cpp
│ LogUtils.h
│ EventBus.h
| EventBus.cpp
│
├─lib
│ AtShell.cpp
│ AtShell.h
│
└─user
user_atshell.cpp
user_atshell.h源文件
main.cpp
c
#include "pico/stdlib.h"
#include "./lib/AtShell.h"
#include "./user/user_atshell.h"
#include "AlarmProtothread.h"
#include "mi_hw_alarm.h"
static uint32_t ledp0cnt=0;
static uint32_t dif_led0_us=0;
static uint32_t ledp1cnt=0;
const uint LED_PIN = 21;
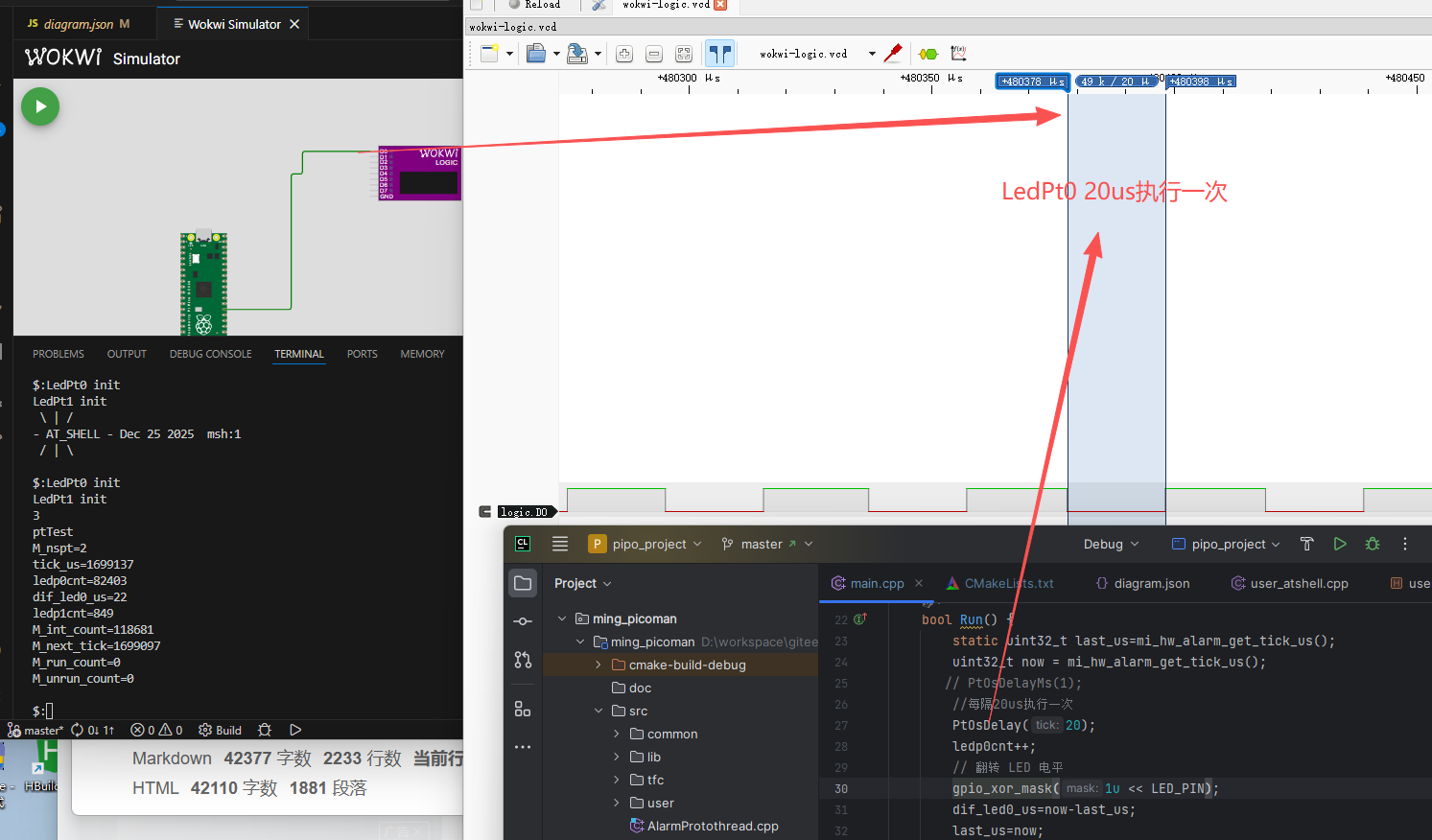
/**
* LedPt0 20us执行一次
* LedPt1 2ms执行一次
*/
class LedPt0 : public AlarmProtothread {
void Init() {
AT_println("LedPt0 init");
ledp0cnt=0;
}
bool Run() {
static uint32_t last_us=mi_hw_alarm_get_tick_us();
uint32_t now = mi_hw_alarm_get_tick_us();
// PtOsDelayMs(1);
//每隔20us执行一次
PtOsDelay(20);
ledp0cnt++;
// 翻转 LED 电平
gpio_xor_mask(1u << LED_PIN);
dif_led0_us=now-last_us;
last_us=now;
return true;
}
};
class LedPt1 : public AlarmProtothread {
void Init() {
AT_println("LedPt1 init");
ledp1cnt=0;
}
bool Run() {
//每隔2ms执行一次
PtOsDelay(2000);
ledp1cnt=ledp1cnt+1;
return true;
}
};
LedPt0 ledPt0;
LedPt1 ledPt1;
static int ptTest(int argc, char** argv) {
AT_println("ptTest");
//协程数量
AT_println("M_nspt=%u",AlarmProtothread::M_nspt);
//定时器us计时器
AT_println("tick_us=%u",mi_hw_alarm_get_tick_us());
//协程任务执行次数
AT_println("ledp0cnt=%u",ledp0cnt);
AT_println("dif_led0_us=%u",dif_led0_us);
AT_println("ledp1cnt=%u",ledp1cnt);
//进中断次数
AT_println("M_int_count=%u",AlarmProtothread::M_int_count);
//下次进定时器中断的时间(us)
AT_println("M_next_tick=%u", AlarmProtothread::M_next_tick);
AT_println("M_run_count=%u", AlarmProtothread::M_run_count);
AT_println("M_unrun_count=%u", AlarmProtothread::M_unrun_count);
return 0;
}
/* ================= main ================= */
int main() {
stdio_init_all();
gpio_init(LED_PIN);
gpio_set_dir(LED_PIN, GPIO_OUT);
gpio_put(LED_PIN, 0); // 初始为低电平
AT_SHELL_EXPORT(test02, "ptTest", ptTest);
user_atShell_init();
AlarmProtothread::PtInit();
AlarmProtothread::AllStart();
/* 主循环:统一发送 Shell 输出 */
while (true) {
user_atShell_loop();
tight_loop_contents();
}
}AlarmProtothread.h
c
#ifndef __AlarmProtothread_H__
#define __AlarmProtothread_H__
#include "stdint.h"
#define PT_MAX_THREAD_NUM 5
#define PT_THREAD_TICK_MS 10
/**
class LEDFlasher : public AlarmProtothread
{
void Init(){
AT_println("dd");
}
bool Run() {
WHILE(1){
AT_println("dd");
PT_DELAY_MS(1000);
}
PT_END();
}
bool _Run() {
AT_println("d33d");
PtOsDelayMs(1000);
return true;
}
};
void let_test(AlarmProtothread * pt) {
LED_TOGGLE();
PT_OS_DELAY_MS(10);
}
AlarmProtothread::Create(let_test);
LEDFlasher ledFlasher;
ledFlasher.Start();
**/
typedef struct {
uint32_t code;
uint32_t ms;
void * args;
} AlarmProtothreadNotifyEvent;
class AlarmProtothread;
typedef void (*PtRunFun)(AlarmProtothread * pt);
class AlarmProtothread
{
public:
static AlarmProtothread* M_pts[PT_MAX_THREAD_NUM];
//for start
static int M_nspt;
static int M_npt;
//for cycle
static uint32_t M_now_tick;
static uint32_t M_next_tick;
//中断次数
static uint32_t M_int_count;
static uint32_t M_run_count;
static uint32_t M_unrun_count;
AlarmProtothread();
virtual ~AlarmProtothread() { }
virtual const char* Name(void) { return("");}
void Restart() { _ptLine = 0; }
void Stop() { _ptLine = LineNumberInvalid; }
bool IsRunning() { return _ptLine != LineNumberInvalid; }
void PtOsDelay(uint32_t tick);
void PtOsDelayMs(uint32_t ms);
void PtOsDelayResume();
virtual void Init();
virtual bool Run();
virtual bool IsContinueRun();
virtual unsigned int Start();
virtual void Notify(AlarmProtothread * target,AlarmProtothreadNotifyEvent evt);
virtual void OnRecvNotify(AlarmProtothread * source,AlarmProtothreadNotifyEvent evt);
static void OnRecvNotify(AlarmProtothread * source, AlarmProtothread * target,AlarmProtothreadNotifyEvent evt);
static void AllStart();
static void PtInit();
static AlarmProtothread* Create(PtRunFun run);
protected:
PtRunFun m_run;
unsigned int m_id;
//下次运行时刻
uint32_t m_delay;
typedef unsigned short LineNumber;
static const LineNumber LineNumberInvalid = (LineNumber)(-1);
LineNumber _ptLine;
public:
uint32_t m_state;
uint32_t m_indata;
uint32_t m_outdata;
uint32_t GetDelay();
uint32_t GetInData();
void SetOutData(uint32_t outdata);
uint32_t PopInData();
bool PushOutData(uint32_t outdata);
static void SetInData(AlarmProtothread * pt,uint32_t indata);
static bool PushIndata(AlarmProtothread * pt,uint32_t indata);
static uint32_t GetOutData(AlarmProtothread * pt);
static uint32_t PopOutData(AlarmProtothread * pt);
};
#define PT_BEGIN() bool ptYielded = true; (void) ptYielded; switch (_ptLine) { case 0:
#define PT_END() default: ; } Stop(); return false;
#define PT_WAIT_UNTIL(condition) \
do { _ptLine = __LINE__; case __LINE__: \
if (!(condition)) return true; } while (0)
#define PT_WAIT_WHILE(condition) PT_WAIT_UNTIL(!(condition))
#define PT_WAIT_THREAD(child) PT_WAIT_WHILE((child).Run())
#define PT_SPAWN(child) \
do { (child).Restart(); PT_WAIT_THREAD(child); } while (0)
#define PT_RESTART() do { Restart(); return true; } while (0)
#define PT_EXIT() do { Stop(); return false; } while (0)
#define PT_YIELD() \
do { ptYielded = false; _ptLine = __LINE__; case __LINE__: \
if (!ptYielded) return true; } while (0)
#define PT_YIELD_UNTIL(condition) \
do { ptYielded = false; _ptLine = __LINE__; case __LINE__: \
if (!ptYielded || !(condition)) return true; } while (0)
#define PT_DELAY(v) \
do { \
PtOsDelay(v); \
PT_WAIT_UNTIL(IsContinueRun()); \
} while(0)
#define PT_DELAY_MS(v) \
do { \
PtOsDelayMs(v); \
PT_WAIT_UNTIL(IsContinueRun()); \
} while(0)
#define WHILE(a) PT_BEGIN(); \
while(1)
#define PT_OS_DELAY(tick) pt->PtOsDelay(tick)
#define PT_OS_DELAY_MS(ms) pt->PtOsDelayMs(ms)
//free time slice
#define PT_FREE_TIME_SLICE(tsMs) PT_THREAD_TICK_MS-(tsMs-AlarmProtothread::M_ms_tick)
#endifAlarmProtothread.cpp
c
#include "AlarmProtothread.h"
#include "mi_hw_alarm.h"
int AlarmProtothread::M_nspt = 0;
int AlarmProtothread::M_npt = 0;
//中断执行次数
uint32_t AlarmProtothread::M_int_count=0;
uint32_t AlarmProtothread::M_now_tick = 0;
uint32_t AlarmProtothread::M_next_tick =0;
uint32_t AlarmProtothread::M_run_count=0;
uint32_t AlarmProtothread::M_unrun_count=0;
AlarmProtothread * AlarmProtothread::M_pts[PT_MAX_THREAD_NUM];
static mi_hw_alarm_t g_alarm;
void alarm_cb(void *arg)
{
uint32_t now = mi_hw_alarm_get_tick_us();
uint32_t minDelay = UINT32_MAX;
AlarmProtothread::M_now_tick = now;
for (int i = 0; i < AlarmProtothread::M_npt; i++) {
AlarmProtothread *pt = AlarmProtothread::M_pts[i];
/* 到期就运行
* Run()重新设置自己的m_delay
*/
AlarmProtothread::M_run_count=0;
if ((int32_t)(now - pt->GetDelay()) >= 0) {
pt->Run();
}
/* 使用 Run() 之后的 delay 参与下一次调度 */
uint32_t d = pt->GetDelay();
if (d < minDelay) {
minDelay = d;
}
}
constexpr uint32_t MIN_IRQ_GAP_US=1;// 安全最小间隔
uint32_t next;
if (minDelay == UINT32_MAX) {
/* 没有任何线程在等待 */
next = now + MIN_IRQ_GAP_US;
}
else if (minDelay <= now + MIN_IRQ_GAP_US) {
/* 防止 schedule 到 now 或极近未来 */
next = now + MIN_IRQ_GAP_US;
}
else {
next = minDelay;
}
AlarmProtothread::M_int_count++;
AlarmProtothread::M_next_tick=next;
mi_hw_alarm_schedule_at(next);
}
AlarmProtothread::AlarmProtothread(): _ptLine(0){
m_delay = 0;
m_indata=0;
m_outdata=0;
m_state=0;
m_run=0;
M_pts[AlarmProtothread::M_nspt++]= this;
}
void AlarmProtothread::PtOsDelay(uint32_t tick) {
m_delay=mi_hw_alarm_get_tick_us()+ tick;
}
void AlarmProtothread::PtOsDelayMs(uint32_t ms) {
m_delay = mi_hw_alarm_get_tick_us() + ms * 1000;
}
bool AlarmProtothread::IsContinueRun(){
if( (int32_t)(AlarmProtothread::M_now_tick - m_delay) >= 0) {
return true;
}
return false;
}
void AlarmProtothread::PtOsDelayResume() {
m_delay=0;
}
void AlarmProtothread::PtInit(){
mi_hw_alarm_init(&g_alarm);
}
void AlarmProtothread::Init() {
}
uint32_t AlarmProtothread::GetDelay(){
return m_delay;
}
uint32_t AlarmProtothread::GetInData(){
return m_indata;
}
void AlarmProtothread::SetInData(AlarmProtothread * pt,uint32_t indata){
pt->m_indata=indata;
}
uint32_t AlarmProtothread::PopInData(){
uint32_t v = m_indata;
m_indata = 0;
return v;
}
bool AlarmProtothread::PushIndata(AlarmProtothread * pt,uint32_t indata){
if (pt->m_indata == 0) {
pt->m_indata = indata;
return true;
}
return false;
}
uint32_t AlarmProtothread::GetOutData(AlarmProtothread * pt){
return pt->m_outdata;
}
void AlarmProtothread::SetOutData(uint32_t outdata){
m_outdata=outdata;
}
uint32_t AlarmProtothread::PopOutData(AlarmProtothread * pt){
uint32_t v=pt->m_outdata;
pt->m_outdata=0;
return v;
}
bool AlarmProtothread::PushOutData(uint32_t outdata){
if(m_outdata==0) {
m_outdata=outdata;
return true;
}
return false;
}
unsigned int AlarmProtothread::Start() {
this->Init();
m_id=AlarmProtothread::M_npt++;
M_pts[m_id]= this;
return m_id;
}
bool AlarmProtothread::Run() {
if(m_run!=0){
m_run(this);
}
return true;
}
AlarmProtothread* AlarmProtothread::Create(PtRunFun run) {
AlarmProtothread* pt= new AlarmProtothread();
pt->m_run=run;
return pt;
}
void AlarmProtothread::AllStart() {
for (int i=0;i<M_nspt;i++){
M_pts[i]->Start();
}
/* 第一次触发 */
mi_hw_alarm_attach(&g_alarm, alarm_cb, 0);
mi_hw_alarm_enable(&g_alarm);
mi_hw_alarm_schedule_after_us(1000);
}
void AlarmProtothread::Notify(AlarmProtothread * target,AlarmProtothreadNotifyEvent evt){
AlarmProtothread::OnRecvNotify(this,target,evt);
if(target== nullptr){
for(int i=0;i<AlarmProtothread::M_npt;i++){
AlarmProtothread::M_pts[i]->OnRecvNotify(target,evt);
}
return;
} else{
target->OnRecvNotify(target,evt);
}
}
void AlarmProtothread::OnRecvNotify(AlarmProtothread * source,AlarmProtothreadNotifyEvent evt){
// nothing
}
void AlarmProtothread::OnRecvNotify(AlarmProtothread * source, AlarmProtothread * target,AlarmProtothreadNotifyEvent evt){
// nothing
}mi_hw_alarm.h
c
#pragma once
#include <stdint.h>
#ifdef __cplusplus
extern "C" {
#endif
typedef void (*mi_hw_alarm_cb_t)(void *user);
typedef struct {
mi_hw_alarm_cb_t cb;
void *user_data;
} mi_hw_alarm_t;
void mi_hw_alarm_init(mi_hw_alarm_t *alarm);
void mi_hw_alarm_attach(mi_hw_alarm_t *alarm,
mi_hw_alarm_cb_t cb,
void *user_data);
void mi_hw_alarm_enable(mi_hw_alarm_t *alarm);
void mi_hw_alarm_disable(void);
void mi_hw_alarm_schedule_at(uint32_t abs_us);
void mi_hw_alarm_schedule_after_us(uint32_t delta_us);
uint32_t mi_hw_alarm_get_tick_us(void);
#ifdef __cplusplus
}
#endifmi_hw_alarm.cpp
c
#include "mi_hw_alarm.h"
#include "hardware/timer.h"
#include "hardware/irq.h"
#define ALARM_NUM 0
#define ALARM_MASK (1u << ALARM_NUM)
/* 只维护一个 alarm 实例 */
static mi_hw_alarm_t *s_alarm = NULL;
/* ============================================================
* IRQ Handler
* ============================================================ */
static void __isr timer_irq_handler(void)
{
/* 清 pending */
hw_clear_bits(&timer_hw->intr, ALARM_MASK);
/* 调用用户回调 */
if (s_alarm && s_alarm->cb) {
s_alarm->cb(s_alarm->user_data);
}
}
/* ============================================================
* 初始化
* ============================================================ */
void mi_hw_alarm_init(mi_hw_alarm_t *alarm)
{
if (!alarm) return;
s_alarm = alarm;
alarm->cb = NULL;
alarm->user_data = NULL;
}
/* ============================================================
* 绑定回调
* ============================================================ */
void mi_hw_alarm_attach(mi_hw_alarm_t *alarm,
mi_hw_alarm_cb_t cb,
void *user_data)
{
if (!alarm) return;
alarm->cb = cb;
alarm->user_data = user_data;
}
/* ============================================================
* 启用 alarm
* ============================================================ */
void mi_hw_alarm_enable(mi_hw_alarm_t *alarm)
{
(void)alarm;
/* 先关 IRQ,防止配置过程触发 */
irq_set_enabled(TIMER_IRQ_0, false);
/* 清 pending,避免"立刻进中断" */
hw_clear_bits(&timer_hw->intr, ALARM_MASK);
/* 独占 IRQ */
irq_set_exclusive_handler(TIMER_IRQ_0, timer_irq_handler);
/* 只使能指定 alarm */
timer_hw->inte |= ALARM_MASK;
irq_set_enabled(TIMER_IRQ_0, true);
}
/* ============================================================
* 关闭 alarm
* ============================================================ */
void mi_hw_alarm_disable(void)
{
irq_set_enabled(TIMER_IRQ_0, false);
timer_hw->inte &= ~ALARM_MASK;
/* 可选:清一次 pending,确保干净 */
hw_clear_bits(&timer_hw->intr, ALARM_MASK);
}
static inline bool time_after_eq_u32(uint32_t a, uint32_t b)
{
return (int32_t)(a - b) >= 0;
}
/* ============================================================
* 设置绝对时间(μs since boot)
* RP2040 alarm 只有 32bit
* ============================================================ */
void mi_hw_alarm_schedule_at(uint32_t abs_us)
{
uint32_t now = timer_hw->timerawl;
if (time_after_eq_u32(now + 1, abs_us)) {
abs_us = now + 1;
}
timer_hw->alarm[ALARM_NUM] = abs_us;
}
/* ============================================================
* 相对延时
* ============================================================ */
void mi_hw_alarm_schedule_after_us(uint32_t delta_us)
{
uint32_t now = timer_hw->timerawl;
/* 防止 0 或极小延迟造成 IRQ 风暴 */
if (delta_us < 10)
delta_us = 10;
timer_hw->alarm[ALARM_NUM] = now + delta_us;
}
/* ============================================================
* 获取当前 tick(μs)
* ============================================================ */
uint32_t mi_hw_alarm_get_tick_us(void)
{
return timer_hw->timerawl;
}user_atshell.h
c
//
// Created by PC on 2025/12/25.
//
#ifndef PIPO_PROJECT_USER_ATSHELL_H
#define PIPO_PROJECT_USER_ATSHELL_H
void user_atShell_init();
void user_atShell_loop();
#endif //PIPO_PROJECT_USER_ATSHELL_Huser_atshell.cpp
c
#include "pico/stdlib.h"
#include "hardware/uart.h"
#include "hardware/irq.h"
#include "../lib/AtShell.h"
#include <cstdint>
/* ================= UART 配置 ================= */
#define UART_ID uart0
#define UART_BAUDRATE 115200
#define UART_TX_PIN 0
#define UART_RX_PIN 1
/* ================= TX 缓冲区类 ================= */
class UartTxBuffer {
public:
explicit UartTxBuffer(size_t size)
: size_(size), head_(0), tail_(0)
{
buf_ = new uint8_t[size_];
}
~UartTxBuffer() {
delete[] buf_;
}
// 写入缓冲区(返回写入字节数)
size_t write(const uint8_t* data, size_t len) {
size_t written = 0;
for (size_t i = 0; i < len; i++) {
if (isFull()) break;
buf_[head_] = data[i];
head_ = (head_ + 1) % size_;
written++;
}
return written;
}
// 从缓冲区读取一个字节
bool read(uint8_t& data) {
if (isEmpty()) return false;
data = buf_[tail_];
tail_ = (tail_ + 1) % size_;
return true;
}
bool isEmpty() const { return head_ == tail_; }
bool isFull() const { return (head_ + 1) % size_ == tail_; }
private:
uint8_t* buf_;
size_t size_;
volatile size_t head_;
volatile size_t tail_;
};
/* ================= 全局对象 ================= */
UartTxBuffer shellTxBuffer(512);
/* ================= BSP 写接口(这个方法是正常是在中断里用的) ================= */
int Bsp_shell_write(uint8_t* buf, uint32_t len, uint32_t timeout) {
(void)timeout;
return shellTxBuffer.write(buf, len);
}
/* ================= UART RX 中断 ================= */
void on_uart_rx() {
while (uart_is_readable(UART_ID)) {
uint8_t ch = uart_getc(UART_ID);
at_import(&ch, 1, 0);
}
}
void user_atShell_init(){
/* UART 初始化 */
uart_init(UART_ID, UART_BAUDRATE);
gpio_set_function(UART_TX_PIN, GPIO_FUNC_UART);
gpio_set_function(UART_RX_PIN, GPIO_FUNC_UART);
uart_set_hw_flow(UART_ID, false, false);
uart_set_format(UART_ID, 8, 1, UART_PARITY_NONE);
uart_set_fifo_enabled(UART_ID, true);
/* UART RX 中断 */
irq_set_exclusive_handler(UART0_IRQ, on_uart_rx);
irq_set_enabled(UART0_IRQ, true);
uart_set_irq_enables(UART_ID, true, false);
/* AtShell 初始化 */
at_init(Bsp_shell_write);
at_show_version();
}
/* ================= main ================= */
void user_atShell_loop() {
uint8_t ch;
while (!shellTxBuffer.isEmpty() && uart_is_writable(UART_ID)) {
if (shellTxBuffer.read(ch))
uart_putc_raw(UART_ID, ch);
}
tight_loop_contents();
}AtShell.h
c
/*
CON_AT_MSH=0: AT模式: 配合 Xmodem1K 更新固件
=>: AT+fun(a,b,c)\r\n
CON_AT_MSH=1: MSH模式: 调试
=>: fun a b \n
**/
#ifndef _AT_SHELL_H
#define _AT_SHELL_H
#include "stdint.h"
#include "string.h"
#include "stdbool.h"
//模式 0:AT 1:MSH
#define CON_AT_MSH 1
//机器Hex通讯 AT+c(55,01 02)
#define CON_AT_USE_CALLBACK 1
//数据监控
#define CON_AT_USE_CycleMonitorData 1
//监控总数量
#define CON_CYCLE_MONITOR_DATA_PACK_NUM 10
//方法数
#define CON_AT_METHOD_NUM 10// 10
#define FINSH_CMD_SIZE 20 //20 //最长命令尺寸
#define RT_FINSH_ARG_MAX 3// 6 //参数个数
#define FINSH_HISTORY_LINES 3 //历史命令条数
#define CON_AT_R_SUCCESS 0 // 成功
#define CON_AT_R_ERR_ARG 1 // 参数错误
#define CON_AT_R_ERR_NO_CMD 2 //无此命令
#define CON_AT_R_ERR_EXEC_FAIL 3 //执行失败
#define CON_AT_WRITE_TIMEOUT 100
//一种异步发送的实现
#define CON_AT_USE_EXPORT 0
#define CON_AT_OUT_BUF_SIZE 200
#define CON_METHOD_NAME_SIZE 8
#define CON_HELP_INFO_SIZE 20
typedef int (*ATServerFun)(int argc, char **argv);
typedef int (*ATWriteFun)(uint8_t *buf, uint32_t len,uint32_t timeout);
#if CON_AT_USE_CALLBACK == 1
typedef void (*ATCallBackFun)(uint32_t code, uint8_t *buf, uint32_t len);
#endif
typedef struct {
char methodName[CON_METHOD_NAME_SIZE];
char helpInfo[CON_HELP_INFO_SIZE];
ATServerFun atFun;
void *userData;
} AT_CMD_ENTRY_TypeDef;
typedef struct {
char tag[CON_CYCLE_MONITOR_DATA_PACK_NUM][10];
uint8_t buffer[CON_CYCLE_MONITOR_DATA_PACK_NUM][100];
uint8_t bufferLen[CON_CYCLE_MONITOR_DATA_PACK_NUM];
uint8_t curInx;
} AT_CycleMonitorDataTypeDef;
#ifdef __cplusplus
class AtShell {
private:
AT_CMD_ENTRY_TypeDef *m_cmdList;
uint32_t m_cmdSize;
int m_cmdNum;
char m_buf[FINSH_CMD_SIZE];
uint32_t m_bufLen;
uint32_t m_importMs;
uint32_t m_lock;
int m_argc;
char m_method[CON_METHOD_NAME_SIZE];
char *m_argv[RT_FINSH_ARG_MAX];
ATWriteFun m_initWriteFun;
ATWriteFun m_writeFun;
virtual bool Parse(char *str);
public:
AtShell();
virtual ~AtShell();
AT_CMD_ENTRY_TypeDef *ctx;
#if CON_AT_USE_CALLBACK == 1
ATCallBackFun m_atCallBackFun;
#endif
#if CON_AT_USE_EXPORT == 1
char m_out_buf[CON_AT_OUT_BUF_SIZE];
uint32_t m_out_bufLen;
virtual void Export();
#endif
virtual void Init(ATWriteFun writeFun);
virtual void SetWriteFun(ATWriteFun writeFun);
virtual void ResetWriteFun();
virtual char *GetBuf() { return m_buf; };
virtual int GetCmdNum() { return m_cmdNum; };
virtual bool Regist(AT_CMD_ENTRY_TypeDef cmd);
virtual bool Regist(AT_CMD_ENTRY_TypeDef *cmdList, int cmdLen);
virtual bool Exec(char *str);
virtual int Import(uint8_t *buf, uint32_t len, uint32_t ms = 0);
virtual int ImportForAt(uint8_t *buf, uint32_t len, uint32_t ms = 0);
virtual int AsyncPrintf(const char *format, ...);
virtual int Printf(const char *format, ...);
virtual int Output(long nLevel, const char *pszFileName, int nLineNo, const char *pszFmt, ...);
virtual int PrintfBs(uint8_t *buf, uint32_t len);
virtual int Write(uint8_t *buf, uint32_t len,uint32_t timeout);
virtual int Write(uint8_t data);
virtual void AtCall(uint32_t code, uint8_t *buf, uint32_t len);
virtual int Reply(uint8_t errCode);
virtual void ShowVersion();
#if CON_AT_USE_CycleMonitorData==1
AT_CycleMonitorDataTypeDef m_monitorData;
virtual int MonitorDataPush(const char *tag, uint8_t * buffer, int len);
virtual int MonitorDataViewInfo();
#endif
#if CON_AT_MSH == 1
uint16_t m_currentHistory;
uint16_t m_historyCount;
char m_cmdHistory[FINSH_HISTORY_LINES][FINSH_CMD_SIZE];
int m_stat;
char m_line[FINSH_CMD_SIZE];
uint8_t m_linePosition;
uint8_t m_lineCurpos;
virtual int ImportForMsh(uint8_t *buf, uint32_t len, uint32_t ms = 0);
virtual void MshAddChar(char ch);
virtual void ShellPushHistory();
virtual void ShellAutoComplete(char *prefix);
virtual void MshAutoComplete(char *prefix);
virtual bool ShellHandleHistory();
#endif
};
extern AtShell g_atShell;
enum AT_LOG_LEVEL {
AT_LOG_LEVEL_TRACE,
AT_LOG_LEVEL_DEBUG,
AT_LOG_LEVEL_INFO,
AT_LOG_LEVEL_WARNING,
AT_LOG_LEVEL_ERROR
};
extern AtShell g_atShell;
#define AT_m_buf g_atShell.GetBuf()
#if CON_AT_MSH == 1
#define AT_FUN(fun) #fun
#else
#define AT_FUN(fun) "AT+"#fun
#endif
#define CONCAT(a, b) a ## b
#define AT_FILE_NAME(x) strrchr(x,'\\')?strrchr(x,'\\')+1:x
#define AT_info(...) g_atShell.Output(AT_LOG_LEVEL_INFO,__func__, __LINE__,__VA_ARGS__)
#define AT_debug(...) g_atShell.Output(AT_LOG_LEVEL_DEBUG,AT_FILE_NAME(__FILE__), __LINE__,__VA_ARGS__)
#define AT_debug1(...) g_atShell.Output(AT_LOG_LEVEL_DEBUG,__func__,__LINE__,__VA_ARGS__)
#define AT_error(...) g_atShell.Output(AT_LOG_LEVEL_ERROR,__PRETTY_FUNCTION__,__LINE__,__VA_ARGS__)
#define AT_printf(format, ...) g_atShell.Printf(format,##__VA_ARGS__)
#define AT_println(format, ...) g_atShell.Printf(format,##__VA_ARGS__);AT_printf("\r\n")
#define AT_aprintf(format, ...) g_atShell.AsyncPrintf(format,##__VA_ARGS__)
#define AT_aprintln(format, ...) g_atShell.AsyncPrintf(format,##__VA_ARGS__);AT_aprintf("\r\n")
#define AT_printfBs(buf, len) g_atShell.PrintfBs(buf,len)
#define rt_kprintf AT_printf
#define ATX_info(w, ...) g_atShell.SetWriteFun(w);AT_info(__VA_ARGS__);g_atShell.ResetWriteFun();
#define ATX_debug(w, ...) g_atShell.SetWriteFun(w);AT_debug(__VA_ARGS__);g_atShell.ResetWriteFun();
#define ATX_error(w, ...) g_atShell.SetWriteFun(w);AT_error(__VA_ARGS__);g_atShell.ResetWriteFun();
#define ATX_printf(w, ...) g_atShell.SetWriteFun(w);AT_printf(__VA_ARGS__);g_atShell.ResetWriteFun();
#define ATX_printfBs(w, buf, len) g_atShell.SetWriteFun(w);g_atShell.PrintfBs(buf,len);g_atShell.ResetWriteFun();
#endif
#if CON_AT_USE_CALLBACK == 1
#define AT_SET_CALL_BACK(fun) g_atShell.m_atCallBackFun=fun
#endif
#define AT_SHELL_EXPORT(cmdName, desc, fun, ...) AT_CMD_ENTRY_TypeDef fun##entrycmd={AT_FUN(cmdName),#desc,fun,__VA_ARGS__}; at_register(fun##entrycmd)
#define AT_EXEC(cmd) g_atShell.Exec(cmd)
#ifdef __cplusplus
extern "C" {
#endif
void at_init(ATWriteFun writeFun);
int at_import(uint8_t *buf, uint32_t len, uint32_t ms);
#if CON_AT_USE_EXPORT == 1
void at_export();
#endif
#if CON_AT_USE_CycleMonitorData == 1
void at_monitor_init();
void at_monitor_push(const char *tag, uint8_t * buffer, int len);
void at_monitor_viewInfo();
#endif
bool at_try_import(uint8_t *buf, uint32_t len, uint32_t ms);
bool at_register(AT_CMD_ENTRY_TypeDef cmd);
bool at_register_many(AT_CMD_ENTRY_TypeDef *cmdList, int cmdLen);
int at_write(uint8_t *buf, uint32_t len,uint32_t timeout);
int at_awrite(uint8_t *buf, uint32_t len);
int at_printf(const char *format, ...);
int at_aprintf(const char *format, ...);
int at_reply(uint8_t errCode);
int at_hexStringToByteArray(const char *hexStr, unsigned char *bs);
long at_str_to_int(char* str);
void at_show_version();
#ifdef __cplusplus
}
#endif
#endif
/*
*
#include <iostream>
#include "AtShell.h"
#include "stdio.h"
int shell_write(uint8_t* buf, uint32_t len,uint32_t timeout) {
return printf("%s", buf);
}
static int test01(int argc, char** argv) {
AT_printf("argc %d:\r\n", argc);
return 0;
}
int main() {
at_init(shell_write);
AT_SHELL_EXPORT(test01, "", test01);
while (1) {
char a = getchar();
uint8_t bs[1] = { a };
at_import(bs, 1, 0);
}
return 0;
}
**/AtShell.cpp
c
#include "AtShell.h"
#include "stdio.h"
#include "stdlib.h"
#include "stdarg.h"
#include "string.h"
#include <ctype.h>
#include <limits.h>
#define CON_AT_DELIMITER "(,)"
#define CON_AT_DELIMITER_BANK " "
#define FINSH_PROMPT "$:"
static int __help(int argc, char **argv);
AtShell g_atShell;
#if CON_AT_MSH == 1
static int __clean(int argc, char **argv) {
AT_printf("\033c");
return 0;
}
#else
static int __at(int argc, char** argv) {
at_reply(CON_AT_R_SUCCESS);
return 0;
}
#endif
#if CON_AT_USE_CALLBACK == 1
static int __call(int argc, char **argv) {
if (argc <= 2) {
return 0;
}
char *hexStr = argv[2];
uint32_t code = strtol(argv[1], NULL, 16);
char *bs = g_atShell.GetBuf();
int len = at_hexStringToByteArray(hexStr, (unsigned char *) bs);
if (g_atShell.m_atCallBackFun != NULL) {
g_atShell.m_atCallBackFun(code, (uint8_t *) bs, len);
}
return 0;
}
#endif
static AT_CMD_ENTRY_TypeDef s_ap_cmd_entry[CON_AT_METHOD_NUM] = {
{AT_FUN(help), "list cmd", __help, 0},
#if CON_AT_USE_CALLBACK == 1
{AT_FUN(c), "(55,01 02)", __call, 0},
#endif
#if CON_AT_MSH == 1
{"clean", "clean screen", __clean, 0},
#else
{ "AT","",__at, 0 },
#endif
};
static int __help(int argc, char **argv) {
int cmdInx = g_atShell.GetCmdNum();
AT_printf("AtShell commands:\r\n");
for (int i = 0; i < cmdInx; i++) {
AT_printf("%2d.%-20s - %s \r\n", i, s_ap_cmd_entry[i].methodName, s_ap_cmd_entry[i].helpInfo);
}
return 0;
}
AtShell::AtShell() {
m_cmdList = s_ap_cmd_entry;
m_cmdSize = CON_AT_METHOD_NUM;
m_cmdNum = 0;
m_writeFun = NULL;
m_bufLen = 0;
m_importMs = 0;
#if CON_AT_USE_EXPORT == 1
m_out_bufLen=0;
#endif
for (size_t i = 0; i < m_cmdSize; i++) {
if (m_cmdList[i].atFun == NULL) {
m_cmdNum = i;
break;
}
}
}
AtShell::~AtShell() {
}
bool AtShell::Regist(AT_CMD_ENTRY_TypeDef cmd) {
if (m_cmdNum >= CON_AT_METHOD_NUM) {
return false;
}
m_cmdList[m_cmdNum] = cmd;
m_cmdNum++;
return true;
}
bool AtShell::Regist(AT_CMD_ENTRY_TypeDef *cmdList, int cmdLen) {
if (m_cmdNum + cmdLen > CON_AT_METHOD_NUM) {
return false;
}
for (int i = 0; i < cmdLen; i++) {
AtShell::Regist(cmdList[i]);
}
return true;
}
void AtShell::Init(ATWriteFun writeFun) {
m_writeFun = writeFun;
m_initWriteFun = writeFun;
}
void AtShell::SetWriteFun(ATWriteFun writeFun) {
m_writeFun = writeFun;
}
void AtShell::ResetWriteFun() {
m_writeFun = m_initWriteFun;
}
bool AtShell::Parse(char *str) {
if (m_buf != str) {
strcpy(m_buf, str);
}
m_argv[0] = m_buf;
char *token;
char delimiter[16] = CON_AT_DELIMITER;
if (strstr((char *) str, "AT") != (char *) str) {
sprintf(delimiter, CON_AT_DELIMITER_BANK);
}
token = strtok(m_buf, delimiter);
int i = 0;
while (token != NULL) {
if (i == 0) {
snprintf(m_method, sizeof(m_method), "%s", token);
snprintf(m_argv[0], sizeof(m_method), "%s", token);
m_argv[1] = &m_buf[strlen(m_argv[0]) + 1];
} else if (i < RT_FINSH_ARG_MAX) {
sprintf(m_argv[i], "%s", token);
m_argv[i + 1] = m_argv[i] + strlen(m_argv[i]) + 1;
}
token = strtok(NULL, delimiter);
i++;
m_argc = i;
}
return true;
}
bool AtShell::Exec(char *str) {
m_lock = 1;
bool r = Parse(str);
if (r == false) {
m_lock = 0;
return r;
}
bool cmd_ret = false;
//methodName match
for (int i = 0; i < m_cmdNum; i++) {
if (strcmp(m_cmdList[i].methodName, m_method) == 0) {
this->ctx = &m_cmdList[i];
m_cmdList[i].atFun(m_argc, m_argv);
cmd_ret = true;
break;
}
}
//inx match
if (!cmd_ret) {
int inx = strtol(m_method, NULL, 10);
if ('0' <= m_method[0] && m_method[0] <= '9' && inx < m_cmdNum) {
this->ctx = &m_cmdList[inx];
m_cmdList[inx].atFun(m_argc, m_argv);
cmd_ret = true;
}
}
if (!cmd_ret) {
char *tcmd;
tcmd = str;
while (*tcmd != ' ' && *tcmd != '\0') {
tcmd++;
}
*tcmd = '\0';
this->Printf("%s: command not found.\n", str);
}
m_bufLen = 0;
m_lock = 0;
return cmd_ret;
}
int AtShell::Import(uint8_t *buf, uint32_t len, uint32_t ms) {
#if CON_AT_MSH == 1
return this->ImportForMsh(buf, len, ms);
#else
return this->ImportForAt(buf, len, ms);
#endif
}
int AtShell::ImportForAt(uint8_t *buf, uint32_t len, uint32_t ms) {
if (m_lock == 1 || len == 0 || len > sizeof(m_buf)) {
return 0;
}
if (buf == NULL || ms - m_importMs > 10 || m_bufLen + len >= sizeof(m_buf)) {
m_bufLen = 0;
}
if (buf != NULL) {
memcpy(m_buf + m_bufLen, buf, len);
}
m_bufLen = m_bufLen + len;
m_importMs = ms;
if (m_bufLen < 3) {
return 0;
}
if (m_buf[m_bufLen - 2] == 0x0d && m_buf[m_bufLen - 1] == 0x0a) {
if (strstr((char *) m_buf, "AT") == (char *) m_buf) {
m_buf[m_bufLen - 1] = 0;
m_buf[m_bufLen - 2] = 0;
} else {
m_buf[m_bufLen - 1] = 0;
m_buf[m_bufLen - 2] = 0;
}
this->Exec(m_buf);
return m_bufLen;
}
return 0;
}
int AtShell::Printf(const char *format, ...) {
char log_buf[256];
va_list args;
va_start(args, format);
vsprintf(log_buf, format, args);
uint32_t len = strlen(log_buf);
m_writeFun((uint8_t *) log_buf, len,CON_AT_WRITE_TIMEOUT);
va_end(args);
return len;
}
int AtShell::Output(long nLevel, const char *pszFileName, int nLineNo, const char *format, ...) {
char log_buf[256];
snprintf(log_buf, sizeof(log_buf), "[%s:%d]", pszFileName, nLineNo);
uint32_t len = strlen(log_buf);
m_writeFun((uint8_t *) log_buf, len,CON_AT_WRITE_TIMEOUT);
va_list args;
va_start(args, format);
vsprintf(log_buf, format, args);
len = strlen(log_buf);
m_writeFun((uint8_t *) log_buf, len,CON_AT_WRITE_TIMEOUT);
va_end(args);
return len;
}
int AtShell::PrintfBs(uint8_t *buf, uint32_t len) {
char log_buf[256];
if (len == 0 || len > 80) {
return 0;
}
for (size_t i = 0; i < len; i++) {
sprintf(&log_buf[3 * i], "%02X ", buf[i]);
}
log_buf[3 * len - 1] = '\n';
this->Write((uint8_t *) log_buf, 3 * len,CON_AT_WRITE_TIMEOUT);
return 3 * len;
}
int AtShell::Write(uint8_t *buf, uint32_t len,uint32_t timeout) {
return m_writeFun(buf, len,timeout);
}
int AtShell::Write(uint8_t data) {
uint8_t temp[1] = {data};
return m_writeFun(temp, 1,CON_AT_WRITE_TIMEOUT);
}
void AtShell::AtCall(uint32_t code, uint8_t *buf, uint32_t len) {
char log_buf[256];
if (len == 0 || len > 80) {
return;
}
for (size_t i = 0; i < len; i++) {
sprintf(&log_buf[3 * i], "%02X ", buf[i]);
}
log_buf[3 * len - 1] = 0;
this->Printf("AT+c(%d,%s)\r\n", code, log_buf);
}
int AtShell::Reply(uint8_t errCode) {
if (errCode) {
this->Printf("NG:%d\r\n", errCode);
return errCode;
}
this->Printf("OK\r\n");
return errCode;
}
void AtShell::ShowVersion() {
this->Printf(" \\ | /\r\n");
this->Printf("- AT_SHELL - %s msh:%d \r\n", __DATE__, CON_AT_MSH);
this->Printf(" / | \\\r\n");
#if CON_AT_MSH == 1
char s[1] = {""};
ShellAutoComplete(s);
#endif
}
#if CON_AT_MSH == 1
#if 0
/*
void msh_split_test(){
char* argv[RT_FINSH_ARG_MAX];
char test_cmd[100] = { "funcname arg0 \"arg1 arg1\"" };
msh_split(test_cmd, sizeof(test_cmd), argv);
}
*/
static int msh_split(char* cmd, uint32_t length, char* argv[RT_FINSH_ARG_MAX])
{
char* ptr;
uint32_t position;
uint32_t argc;
uint32_t i;
/* strim the beginning of command */
while (*cmd == ' ' || *cmd == '\t')
{
cmd++;
length--;
}
if (length == 0)
return 0;
ptr = cmd;
position = 0; argc = 0;
while (position < length)
{
/* strip bank and tab */
while ((*ptr == ' ' || *ptr == '\t') && position < length)
{
*ptr = '\0';
ptr++; position++;
}
if (argc >= RT_FINSH_ARG_MAX)
{
rt_kprintf("Too many args ! We only Use:\n");
for (i = 0; i < argc; i++)
{
rt_kprintf("%s ", argv[i]);
}
rt_kprintf("\n");
break;
}
if (position >= length) break;
/* handle string */
if (*ptr == '"')
{
ptr++; position++;
argv[argc] = ptr; argc++;
/* skip this string */
while (*ptr != '"' && position < length)
{
if (*ptr == '\\')
{
if (*(ptr + 1) == '"')
{
ptr++; position++;
}
}
ptr++; position++;
}
if (position >= length) break;
/* skip '"' */
*ptr = '\0'; ptr++; position++;
}
else
{
argv[argc] = ptr;
argc++;
while ((*ptr != ' ' && *ptr != '\t') && position < length)
{
ptr++; position++;
}
if (position >= length) break;
}
}
return argc;
}
#endif
static void *rt_memmove(void *dest, const void *src, uint32_t n) {
char *tmp = (char *) dest, *s = (char *) src;
if (s < tmp && tmp < s + n) {
tmp += n;
s += n;
while (n--)
*(--tmp) = *(--s);
} else {
while (n--)
*tmp++ = *s++;
}
return dest;
}
static char *rt_strncpy(char *dst, const char *src, uint32_t n) {
if (n != 0) {
char *d = dst;
const char *s = src;
do {
if ((*d++ = *s++) == 0) {
/* NUL pad the remaining n-1 bytes */
while (--n != 0)
*d++ = 0;
break;
}
} while (--n != 0);
}
return (dst);
}
static int str_common(const char *str1, const char *str2) {
const char *str = str1;
while ((*str != 0) && (*str2 != 0) && (*str == *str2)) {
str++;
str2++;
}
return (str - str1);
}
int AtShell::ImportForMsh(uint8_t *buf, uint32_t len, uint32_t ms) {
for (size_t i = 0; i < len; i++) {
MshAddChar(buf[i]);
}
return len;
}
void AtShell::ShellAutoComplete(char *prefix) {
this->Printf("\r\n");
MshAutoComplete(prefix);
this->Printf("%s%s", FINSH_PROMPT, prefix);
}
void AtShell::MshAutoComplete(char *prefix) {
int length, min_length;
const char *name_ptr, *cmd_name;
int index;
min_length = 0;
name_ptr = 0;
if (*prefix == '\0') {
return;
}
for (index = 0; index < g_atShell.GetCmdNum(); index++) {
/* skip finsh shell function */
cmd_name = s_ap_cmd_entry[index].methodName;
if (strncmp(prefix, cmd_name, strlen(prefix)) == 0) {
if (min_length == 0) {
/* set name_ptr */
name_ptr = cmd_name;
/* set initial length */
min_length = strlen(name_ptr);
}
length = str_common(name_ptr, cmd_name);
if (length < min_length)
min_length = length;
this->Printf("%s\r\n", cmd_name);
}
}
/* auto complete string */
if (name_ptr != NULL) {
rt_strncpy(prefix, name_ptr, min_length);
}
return;
}
void AtShell::MshAddChar(char ch) {
enum input_stat {
WAIT_NORMAL = 0,
WAIT_SPEC_KEY,
WAIT_FUNC_KEY,
};
/*
* handle control key
* up key : 0x1b 0x5b 0x41
* down key: 0x1b 0x5b 0x42
* right key:0x1b 0x5b 0x43
* left key: 0x1b 0x5b 0x44
*/
if (ch == 0x1b) {
m_stat = WAIT_SPEC_KEY;
return;
} else if (m_stat == WAIT_SPEC_KEY) {
if (ch == 0x5b) {
m_stat = WAIT_FUNC_KEY;
return;
}
m_stat = WAIT_NORMAL;
} else if (m_stat == WAIT_FUNC_KEY) {
m_stat = WAIT_NORMAL;
if (ch == 0x41) /* up key */
{
/* prev history */
if (m_currentHistory > 0)
m_currentHistory--;
else {
m_currentHistory = 0;
return;
}
/* copy the history command */
memcpy(m_line, &m_cmdHistory[m_currentHistory][0], FINSH_CMD_SIZE);
m_lineCurpos = m_linePosition = strlen(m_line);
ShellHandleHistory();
return;
} else if (ch == 0x42) {
/* next history */
if (m_currentHistory < m_historyCount - 1)
m_currentHistory++;
else {
/* set to the end of history */
if (m_historyCount != 0)
m_currentHistory = m_historyCount - 1;
else
return;
}
memcpy(m_line, &m_cmdHistory[m_currentHistory][0],
FINSH_CMD_SIZE);
m_lineCurpos = m_linePosition = strlen(m_line);
ShellHandleHistory();
return;
} else if (ch == 0x44) /* left key */
{
if (m_lineCurpos) {
this->Printf("\b");
m_lineCurpos--;
}
return;
} else if (ch == 0x43) /* right key */
{
if (m_lineCurpos < m_linePosition) {
this->Printf("%c", m_line[m_lineCurpos]);
m_lineCurpos++;
}
return;
}
}
/* received null or error */
if (ch == '\0' || ch == 0xFF) return;
/* handle tab key */
else if (ch == '\t') {
int i;
/* move the cursor to the beginning of line */
for (i = 0; i < m_lineCurpos; i++)
this->Printf("\b");
/* auto complete */
ShellAutoComplete(&m_line[0]);
/* re-calculate position */
m_lineCurpos = m_linePosition = strlen(m_line);
return;
}
/* handle backspace key */
else if (ch == 0x7f || ch == 0x08) {
/* note that line_curpos >= 0 */
if (m_lineCurpos == 0)
return;
m_linePosition--;
m_lineCurpos--;
if (m_linePosition > m_lineCurpos) {
int i;
rt_memmove(&m_line[m_lineCurpos],
&m_line[m_lineCurpos + 1],
m_linePosition - m_lineCurpos);
m_line[m_linePosition] = 0;
this->Printf("\b%s \b", &m_line[m_lineCurpos]);
/* move the cursor to the origin position */
for (i = m_lineCurpos; i <= m_linePosition; i++)
this->Printf("\b");
} else {
this->Printf("\b \b");
m_line[m_linePosition] = 0;
}
return;
}
/* handle end of line, break */
if (ch == '\r' || ch == '\n') {
ShellPushHistory();
this->Printf("\r\n");
// printf("%s", line);
m_line[m_linePosition] = '\0';
g_atShell.Exec(m_line);
this->Printf("\r\n%s", FINSH_PROMPT);
memset(m_line, 0, sizeof(m_line));
m_lineCurpos = m_linePosition = 0;
return;
}
/* it's a large line, discard it */
if (m_linePosition >= FINSH_CMD_SIZE)
m_linePosition = 0;
/* normal character */
if (m_lineCurpos < m_linePosition) {
int i;
rt_memmove(&m_line[m_lineCurpos + 1], &m_line[m_lineCurpos], m_linePosition - m_lineCurpos);
m_line[m_lineCurpos] = ch;
this->Printf("%s", &m_line[m_lineCurpos]);
/* move the cursor to new position */
for (i = m_lineCurpos; i < m_linePosition; i++)
this->Printf("\b");
} else {
m_line[m_linePosition] = ch;
this->Printf("%c", ch);
}
ch = 0;
m_linePosition++;
m_lineCurpos++;
if (m_linePosition >= FINSH_CMD_SIZE) {
/* clear command line */
m_linePosition = 0;
m_lineCurpos = 0;
}
}
void AtShell::ShellPushHistory() {
if (m_linePosition != 0) {
/* push history */
if (m_historyCount >= FINSH_HISTORY_LINES) {
/* if current cmd is same as last cmd, don't push */
if (memcmp(&m_cmdHistory[FINSH_HISTORY_LINES - 1], m_line, FINSH_CMD_SIZE)) {
/* move history */
int index;
for (index = 0; index < FINSH_HISTORY_LINES - 1; index++) {
memcpy(&m_cmdHistory[index][0],
&m_cmdHistory[index + 1][0], FINSH_CMD_SIZE);
}
memset(&m_cmdHistory[index][0], 0, FINSH_CMD_SIZE);
memcpy(&m_cmdHistory[index][0], m_line, m_linePosition);
m_historyCount = FINSH_HISTORY_LINES;
}
} else {
/* if current cmd is same as last cmd, don't push */
if (m_historyCount == 0 || memcmp(&m_cmdHistory[m_historyCount - 1], m_line, FINSH_CMD_SIZE)) {
m_currentHistory = m_historyCount;
memset(&m_cmdHistory[m_historyCount][0], 0, FINSH_CMD_SIZE);
memcpy(&m_cmdHistory[m_historyCount][0], m_line, m_linePosition);
m_historyCount++;
}
}
}
m_currentHistory = m_historyCount;
}
bool AtShell::ShellHandleHistory() {
#if defined(_WIN32)
int i;
this->Printf("\r");
for (i = 0; i <= 60; i++)
this->Write(' ');
this->Printf("\r");
#else
rt_kprintf("\033[2K\r");
#endif
this->Printf("%s%s", FINSH_PROMPT, m_line);
return 0;
}
#endif
#if CON_AT_USE_EXPORT == 1
void AtShell::Export(){
if(m_out_bufLen>0){
m_writeFun((uint8_t *) m_out_buf, m_out_bufLen,CON_AT_WRITE_TIMEOUT);
}
m_out_bufLen=0;
}
#endif
#if CON_AT_USE_EXPORT == 1
int AtShell::AsyncPrintf(const char *format, ...){
char log_buf[256];
va_list args;
va_start(args, format);
vsprintf(log_buf, format, args);
uint32_t len = strlen(log_buf);
if(m_out_bufLen+len < CON_AT_OUT_BUF_SIZE){
memcpy(m_out_buf + m_out_bufLen, log_buf, len);
m_out_bufLen=m_out_bufLen+len;
} else{
AT_error("error \r\n");
}
va_end(args);
return len;
}
#else
int AtShell::AsyncPrintf(const char *format, ...){
char log_buf[256];
va_list args;
va_start(args, format);
vsprintf(log_buf, format, args);
uint32_t len = strlen(log_buf);
m_writeFun((uint8_t *) log_buf, len,0);
va_end(args);
return len;
}
#endif
#if CON_AT_USE_CycleMonitorData==1
static uint8_t _sum(uint8_t * buffer, int len){
uint8_t sum = 0;
for (int i = 0; i < len; i++) {
sum += buffer[i];
}
return(sum);
}
int AtShell::MonitorDataPush(const char *tag, uint8_t * buffer, int len){
if(m_monitorData.curInx==CON_CYCLE_MONITOR_DATA_PACK_NUM){
m_monitorData.curInx=0;
}
sprintf(m_monitorData.tag[m_monitorData.curInx], "%s", tag);
memcpy(m_monitorData.buffer[m_monitorData.curInx],buffer,len);
m_monitorData.bufferLen[m_monitorData.curInx]=len;
m_monitorData.curInx++;
return 0;
}
int AtShell::MonitorDataViewInfo(){
int inx=m_monitorData.curInx-1;
for(int i=0;i<CON_CYCLE_MONITOR_DATA_PACK_NUM;i++){
if(inx==-1){
inx=9;
}
this->Printf("%s:%3d.%3d@",m_monitorData.tag[inx],m_monitorData.bufferLen[inx],_sum(m_monitorData.buffer[inx],m_monitorData.bufferLen[inx]));
AT_printfBs( m_monitorData.buffer[inx],m_monitorData.bufferLen[inx]);
this->Printf("\r\n");
inx--;
}
return 0;
}
#endif
void at_init(ATWriteFun writeFun) {
g_atShell.Init(writeFun);
}
int at_import(uint8_t *buf, uint32_t len, uint32_t ms) {
return g_atShell.Import(buf, len, ms);
}
bool at_try_import(uint8_t *buf, uint32_t len, uint32_t ms) {
if (CON_AT_MSH || strstr((char*)buf, "AT") == (char*)buf || strstr((char*)buf, "\r\n") == (char*)buf) {
g_atShell.Import(buf, len, ms);
return true;
}
return false;
}
#if CON_AT_USE_EXPORT == 1
void at_export() {
g_atShell.Export();
}
#endif
bool at_register(AT_CMD_ENTRY_TypeDef cmd) {
return g_atShell.Regist(cmd);
}
bool at_register_many(AT_CMD_ENTRY_TypeDef *cmdList, int cmdLen) {
return g_atShell.Regist(cmdList, cmdLen);
}
int at_write(uint8_t *buf, uint32_t len,uint32_t timeout){
return g_atShell.Write(buf,len,timeout);
}
int at_printf(const char *format, ...) {
char log_buf[256];
va_list args;
va_start(args, format);
vsprintf(log_buf, format, args);
uint32_t len = strlen(log_buf);
g_atShell.Write((uint8_t *) log_buf, len,CON_AT_WRITE_TIMEOUT);
va_end(args);
return len;
}
int at_awrite(uint8_t *buf, uint32_t len){
#if CON_AT_USE_EXPORT == 1
if(g_atShell.m_out_bufLen+len < CON_AT_OUT_BUF_SIZE){
memcpy(g_atShell.m_out_buf + g_atShell.m_out_bufLen, buf, len);
g_atShell.m_out_bufLen=g_atShell.m_out_bufLen+len;
return len;
}
return 0;
#else
return g_atShell.Write(buf,len,0);;
#endif
}
int at_aprintf(const char *format, ...) {
char log_buf[256];
va_list args;
va_start(args, format);
vsprintf(log_buf, format, args);
uint32_t len = strlen(log_buf);
at_awrite((uint8_t *) log_buf, len);
va_end(args);
return len;
}
int at_reply(uint8_t errCode) {
return g_atShell.Reply(errCode);
}
void at_show_version() {
g_atShell.ShowVersion();
}
int at_hexStringToByteArray(const char *hexStr, unsigned char *bs) {
char token[3];
int i = 0;
long int byteValue;
const int byteArrayLen = (strlen(hexStr) + 1) / 3;
while (*hexStr && i < byteArrayLen) {
if (isspace(*hexStr)) {
hexStr++;
continue;
}
if (!isxdigit(*hexStr)) {
return i;
}
token[0] = *hexStr++;
token[1] = *hexStr++;
token[2] = '\0';
byteValue = strtol(token, NULL, 16);
bs[i] = (unsigned char) byteValue;
i++;
}
return i;
}
long at_str_to_int(char* str) {
char* endptr;
int base = 10;
if (str == 0) {
return 0;
}
if (str[0] == '0') {
if (str[1] == 'x' || str[1] == 'X') {
base = 16;
str += 2;
}
else {
base = 8;
}
}
long result = strtol(str, &endptr, base);
if (*endptr != '\0') {
return 0;
}
return result;
}
#if CON_AT_USE_CycleMonitorData == 1
void at_monitor_init(){
g_atShell.m_monitorData.curInx=0;
}
void at_monitor_push(const char *tag, uint8_t * buffer, int len){
g_atShell.MonitorDataPush(tag, buffer, len);
}
void at_monitor_viewInfo(){
g_atShell.MonitorDataViewInfo();
}
#endifLogUtils.h
c
#ifndef _LogUtils_HPP
#define _LogUtils_HPP
#include <string>
#include <stdint.h>
using namespace std;
#define LOG_ERROR(...) LogUtils::LogError(__FILE__, __LINE__, __VA_ARGS__)
#define LOG_INFO(...) LogUtils::LogInfo(__FILE__, __LINE__, __VA_ARGS__)
#define LOG_DEBUG(...) LogUtils::LogDebug(__FILE__, __LINE__, __VA_ARGS__)
#define LOG_DEBUG_DT(...) LogUtils::LogDebugDifTime(__FILE__, __LINE__, __VA_ARGS__)
namespace Common {
class LogUtils {
public:
static int Printf(const char *format, ...) ;
static int Println(const char *format, ...) ;
static void PrintBuf(const string tag, uint8_t *buf, uint16_t bufLen) ;
static void LogInfo(const char *fmt, ...) ;
static void LogInfo(const char* file, int line, const char* format, ...);
static void LogDebug(const char *fmt, ...) ;
static void LogDebugDifTime(const char* file, int line, const char* format, ...);
static void LogDebug(const char* file, int line, const char* format, ...);
static void LogError(const char *fmt, ...) ;
static void LogError(const char* file, int line, const char* format, ...);
};
}
#endifLogUtils.cpp
c
#include "LogUtils.h"
#include "stdarg.h"
#include "string.h"
#include "stdio.h"
#include <string>
#define CON_ENABLE_LOG 1
using namespace std;
using namespace Common;
int LogUtils::Printf(const char *format, ...) {
if (CON_ENABLE_LOG) {
char log_buf[256];
va_list args;
va_start(args, format);
vsprintf(log_buf, format, args);
va_end(args);
uint32_t len = strlen(log_buf);
printf("%s", log_buf);
return len;
}
return 0;
}
int LogUtils::Println(const char *format, ...) {
if (CON_ENABLE_LOG) {
char log_buf[256];
va_list args;
va_start(args, format);
vsprintf(log_buf, format, args);
va_end(args);
uint32_t len = strlen(log_buf);
printf("%s\n\r", log_buf);
return len;
}
return 0;
}
void LogUtils::PrintBuf(const string tag, uint8_t *buf, uint16_t bufLen) {
if (CON_ENABLE_LOG) {
LogUtils::Printf(tag.c_str());
for (int i = 0; i < bufLen; i++) {
LogUtils::Printf("%02x ", buf[i]);
}
LogUtils::Printf("\n");
}
}
void LogUtils::LogInfo(const char *fmt, ...) {
va_list args;
va_start(args, fmt);
fprintf(stdout, "[INFO] ");
vfprintf(stdout, fmt, args);
fprintf(stdout, "\n");
va_end(args);
}
void LogUtils::LogInfo(const char* file, int line, const char* format, ...) {
char buffer[1024];
va_list args;
va_start(args, format);
vsnprintf(buffer, sizeof(buffer), format, args);
va_end(args);
const char* filename = strrchr(file, '/');
if (!filename) {
filename = strrchr(file, '\\');
}
filename = filename ? filename + 1 : file;
fprintf(stdout, "[INFO] %s:%d - %s\n", filename, line, buffer);
}
void LogUtils::LogDebug(const char *fmt, ...) {
va_list args;
va_start(args, fmt);
fprintf(stdout, "[Debug] ");
vfprintf(stdout, fmt, args);
fprintf(stdout, "\n");
va_end(args);
}
void LogUtils::LogDebug(const char* file, int line, const char* format, ...) {
char buffer[1024];
va_list args;
va_start(args, format);
vsnprintf(buffer, sizeof(buffer), format, args);
va_end(args);
const char* filename = strrchr(file, '/');
if (!filename) {
filename = strrchr(file, '\\');
}
filename = filename ? filename + 1 : file;
fprintf(stdout, "[Debug] %s:%d - %s\n", filename, line, buffer);
}
void LogUtils::LogDebugDifTime(const char* file, int line, const char* format, ...) {
if(format== nullptr){
return;
}
static uint32_t lastTime=0;
char buffer[1024];
va_list args;
va_start(args, format);
vsnprintf(buffer, sizeof(buffer), format, args);
va_end(args);
const char* filename = strrchr(file, '/');
if (!filename) {
filename = strrchr(file, '\\');
}
filename = filename ? filename + 1 : file;
uint32_t nowTime=1;
fprintf(stdout, "[Debug] %s:%d@t:%d - %s\n", filename, line,nowTime-lastTime, buffer);
lastTime=nowTime;
}
void LogUtils::LogError(const char *fmt, ...) {
va_list args;
va_start(args, fmt);
fprintf(stderr, "[ERROR] ");
vfprintf(stderr, fmt, args);
fprintf(stderr, "\n");
fflush(stderr);
va_end(args);
}
void LogUtils::LogError(const char* file, int line, const char* format, ...) {
char buffer[1024];
va_list args;
va_start(args, format);
vsnprintf(buffer, sizeof(buffer), format, args);
va_end(args);
const char* filename = strrchr(file, '/');
if (!filename) {
filename = strrchr(file, '\\');
}
filename = filename ? filename + 1 : file;
fprintf(stderr, "[ERROR] %s:%d - %s\n", filename, line, buffer);
fflush(stderr);
}EventBus.h
c
#ifndef COMMON_EVENT_BUS_H
#define COMMON_EVENT_BUS_H
#include <string>
#include <functional>
#include <map>
#include <vector>
#include <mutex>
#define EventSubscribe(type,instance,handler) EventBus::GetInstance().Subscribe(type,instance,handler)
#define EventPublish(type,data) EventBus::GetInstance().Publish(type,data)
namespace Common {
enum class EventType : uint32_t {
None = 0,
PUSH_DATA=1
};
class EventBus {
public:
// 事件处理函数类型
template<typename T>
using MemberHandler = void (T::*)(EventType event, void* data);
// 获取单例实例
static EventBus& GetInstance();
// 订阅事件(使用成员函数)
template<typename T>
void Subscribe(EventType eventType, T* instance, MemberHandler<T> handler) {
auto callback = [instance, handler](EventType evt, void* data) {
(instance->*handler)(evt, data);
};
Subscribe(eventType, callback);
}
// 订阅事件(使用普通函数或 lambda)
void Subscribe(EventType eventType, std::function<void(EventType, void*)> handler);
// 取消订阅
void Unsubscribe(EventType eventType);
// 发布事件
void Publish(EventType event, void* data);
// 检查是否有订阅者
bool HasSubscribers(EventType event) const;
// 获取订阅者数量
size_t GetSubscriberCount(EventType event) const;
private:
EventBus();
~EventBus();
struct Storage;
Storage* storage_;
};
} // namespace Common
#endif // COMMON_EVENT_BUS_H EventBus.cpp
c
#include "EventBus.h"
#include "LogUtils.h"
#include "pico/sync.h"
namespace Common {
struct EventBus::Storage {
critical_section_t cs;
std::map<EventType,
std::vector<std::function<void(EventType, void*)>>> subs;
};
EventBus& EventBus::GetInstance() {
static EventBus instance;
return instance;
}
EventBus::EventBus() {
storage_ = new Storage;
critical_section_init(&storage_->cs);
}
EventBus::~EventBus() {
critical_section_deinit(&storage_->cs);
delete storage_;
}
void EventBus::Subscribe(EventType eventType, std::function<void(EventType, void*)> handler) {
critical_section_enter_blocking(&storage_->cs);
storage_->subs[eventType].push_back(handler);
critical_section_exit(&storage_->cs);
}
void EventBus::Unsubscribe(EventType eventType) {
critical_section_enter_blocking(&storage_->cs);
storage_->subs.erase(eventType);
critical_section_exit(&storage_->cs);
}
void EventBus::Publish(EventType eventType, void* data) {
std::vector<std::function<void(EventType, void*)>> handlers;
critical_section_enter_blocking(&storage_->cs);
auto it = storage_->subs.find(eventType);
if (it != storage_->subs.end())
handlers = it->second;
critical_section_exit(&storage_->cs);
for (auto& h : handlers){
h(eventType, data);
}
}
bool EventBus::HasSubscribers(EventType eventType) const {
auto it = storage_->subs.find(eventType);
return it != storage_->subs.end() && !it->second.empty();
}
size_t EventBus::GetSubscriberCount(EventType eventType) const {
auto it = storage_->subs.find(eventType);
return it != storage_->subs.end() ? it->second.size() : 0;
}
}配置文件
.gitignore
bash
cmake-build-debug
# 第一步:忽略 .idea 目录下的所有文件/子目录
.idea/*
!.idea/encodings.xml
!.idea/wokwi.toml
bash
[wokwi]
version = 1
firmware = "cmake-build-debug/pipo_project.uf2"
elf = "cmake-build-debug/pipo_project.elf"
rfc2217ServerPort = 4000pico_sdk_import.cmake
bash
# This is a copy of the pico_sdk_import.cmake file from the Pico SDK
# It's needed to properly import the Pico SDK in CMake projects
if (DEFINED ENV{PICO_SDK_PATH} AND (NOT PICO_SDK_PATH))
set(PICO_SDK_PATH $ENV{PICO_SDK_PATH})
message("Using PICO_SDK_PATH from environment: ${PICO_SDK_PATH}")
endif ()
if (NOT PICO_SDK_PATH)
message(FATAL_ERROR "PICO_SDK_PATH is not defined. Either set it in the environment, or pass -DPICO_SDK_PATH=xxx to cmake")
endif ()
set(PICO_SDK_INIT_CMAKE_FILE "${PICO_SDK_PATH}/pico_sdk_init.cmake")
if (NOT EXISTS ${PICO_SDK_INIT_CMAKE_FILE})
message(FATAL_ERROR "Could not find pico_sdk_init.cmake in ${PICO_SDK_PATH}")
endif ()
include( ${PICO_SDK_INIT_CMAKE_FILE})
message(AAAAAAAAAAAAA ${PICO_SDK_INIT_CMAKE_FILE})diagram.json
json
{
"version": 1,
"author": "wang minglie",
"editor": "wokwi",
"parts": [
{
"type": "wokwi-pi-pico",
"id": "pico",
"top": -3.15,
"left": 3.6,
"attrs": { "builder": "pico-sdk" }
},
{ "type": "wokwi-logic-analyzer", "id": "logic1", "top": -143.65, "left": 326.4, "attrs": {} }
],
"connections": [
[ "pico:GP0", "$serialMonitor:RX", "", [] ],
[ "pico:GP1", "$serialMonitor:TX", "", [] ],
[ "pico:GP21", "logic1:D0", "green", [ "h116.4", "v-230.4", "h19.2", "v-38.4" ] ]
],
"dependencies": {}
}CMakeLists.txt
bash
cmake_minimum_required(VERSION 3.13)
# Set Pico SDK path
# Include the Pico SDK CMake configuration
include(pico_sdk_import.cmake)
project(pipo_project C CXX ASM)
pico_sdk_init()
add_executable(pipo_project
src/main.cpp
src/mi_hw_alarm.cpp
src/user/user_atshell.cpp
src/lib/AtShell.cpp
src/common/LogUtils.cpp
src/AlarmProtothread.cpp
)
target_link_libraries(
pipo_project
pico_stdlib
hardware_exception
)
# Enable USB output, disable UART output
pico_enable_stdio_usb(pipo_project 0)
pico_enable_stdio_uart(pipo_project 1)
pico_add_extra_outputs(pipo_project)copy_uf2.bat
bash
@echo off
set "src=D:\workspace\gitee\2\ming_picoman\cmake-build-debug\pipo_project.uf2"
set "dst=F:"
if not exist "%src%" (
echo Error: UF2 file not found!
pause
exit 1
)
if not exist "%dst%" (
echo Error: USB drive %dst% not found!
pause
exit 1
)
copy /Y "%src%" %dst%
if %errorlevel% equ 0 (
echo Success! Pico is rebooting...
) else (
echo Failed! Reconnect Pico and try again.
)
pause