Sync-Manager (SM)
同步管理器(SM)可通过 "过程数据" 选项卡更改可用过程数据的范围(见下图)。
Output SyncManager (SM2)
输出同步管理器(SM2)0x16nm 范围(0x1600 至 0x1631)的 PDO 可分配至输出同步管理器 2。
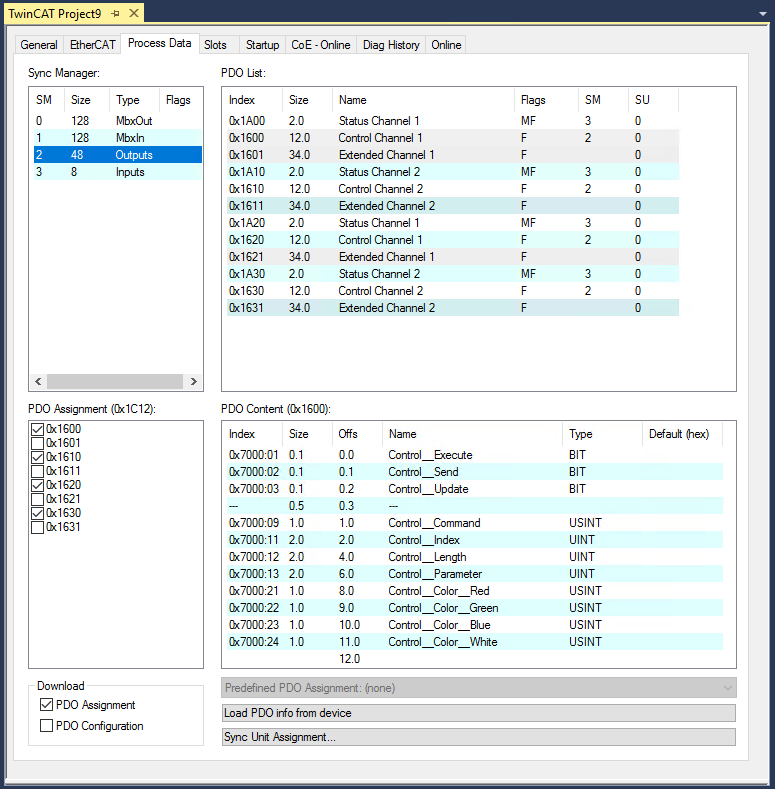
图 :EL2574 - 过程数据 输出同步管理器(SM2)
Input SyncManager (SM 3)
输入同步管理器(SM3)0x1An0 范围(0x1A00 至 0x1A30)的 PDO 可分配至输入同步管理器 3。
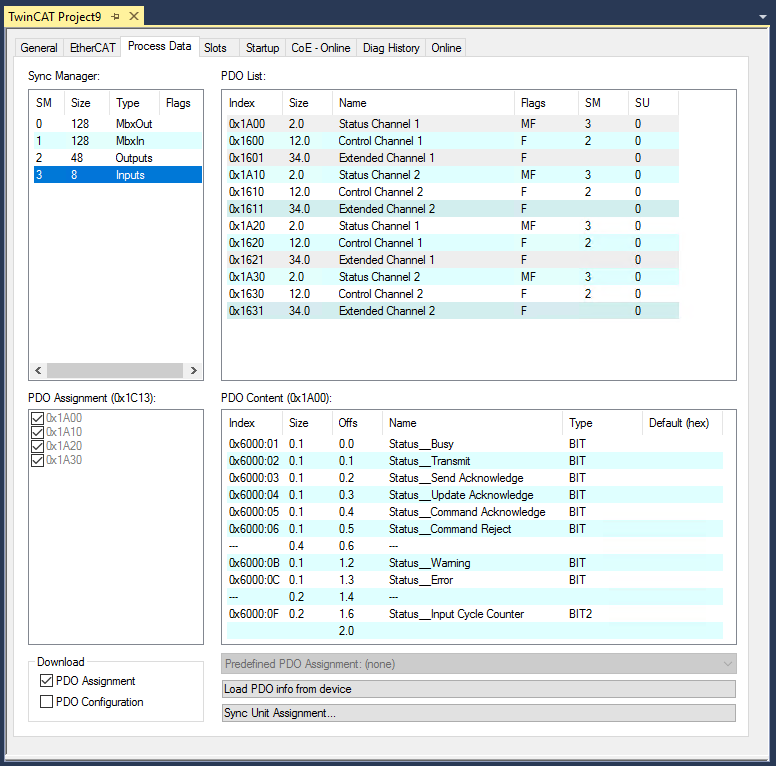
图 :EL2574 - 过程数据 输入同步管理器(SM3)
Manual PDO Assignment
手动 PDO 分配
如需配置过程数据,请执行以下步骤:
- 在左上方的 "同步管理器"(Sync Manager)框中选择所需的同步管理器(仅可编辑 SM2 和 SM3)。
- 随后可在下方的 "PDO 分配"(PDO Assignment)框中,开启或关闭分配给该同步管理器的过程数据。
- 重启 EtherCAT 系统,或在配置模式(F4)下重新加载配置,将导致 EtherCAT 通信重启,过程数据将从端子模块传输。
SM2,PDO 分配 0x1C12
| 索引 | 排除的 PDO 索引 | 大小(字节。位) | 名称 | PDO 内容索引 - 名称 |
|---|---|---|---|---|
| 0x16n0 | - | 12.0 | 控制通道 n(Control Channel n) | 0x70n00:01 -- 控制_执行(Control_Execute)0x70n00:02 -- 控制_发送(Control_Send)0x70n00:03 -- 控制_写入(Control_Write)0x70n00:11 -- 控制_索引(Control_Index)0x70n00:12 -- 控制_长度(Control_Length)0x70n00:13 -- 控制_参数(Control_Parameter)0x70n00:21 -- 控制_颜色_红色(Control_Color_Red)0x70n00:22 -- 控制_颜色_绿色(Control_Color_Green)0x70n00:23 -- 控制_颜色_蓝色(Control_Color_Blue)0x70n00:24 -- 控制_颜色_白色(Control_Color_White) |
| 0x16n1 | - | 34.0 | 扩展通道 n(Extended Channel n) | 0x70n1:01 -- 扩展控制_执行(Extended Control_Execute)0x70n1:02 -- 扩展控制_发送(Extended Control_Send)0x70n1:03 -- 扩展控制_更新(Extended Control_Update)0x70n1:04 -- 扩展控制_写入(Extended Control_Write)0x70n1:09 -- 扩展控制_索引(Extended Control_Index)0x70n1:11 -- 扩展控制_段_元素 0(Extended Control_Segment_Element 0)0x70n1:12 -- 扩展控制_段_元素 1(Extended Control_Segment_Element 1)0x70n1:13 -- 扩展控制_段_元素 2(Extended Control_Segment_Element 2)0x70n1:14 -- 扩展控制_段_元素 3(Extended Control_Segment_Element 3)0x70n1:15 -- 扩展控制_段_元素 4(Extended Control_Segment_Element 4)0x70n1:16 -- 扩展控制_段_元素 5(Extended Control_Segment_Element 5)0x70n1:17 -- 扩展控制_段_元素 6(Extended Control_Segment_Element 6)0x70n1:18 -- 扩展控制_段_元素 7(Extended Control_Segment_Element 7) |
SM3,PDO 分配 0x1C13
| 索引 | 排除的 PDO 索引 | 大小(字节。位) | 名称 | PDO 内容索引 - 名称 |
|---|---|---|---|---|
| 0x1An0 | - | 2.0 | 状态通道 n(Status Channel n) | 0x60n00:01 -- 状态_忙(Status_Busy)0x60n00:02 -- 状态_传输(Status_Transmit)0x60n00:03 -- 状态_发送确认(Status_Send Acknowledge)0x60n00:04 -- 状态_更新确认(Status_Update Acknowledge)0x60n00:05 -- 状态_命令确认(Status_Command Acknowledge)0x60n00:06 -- 状态_命令拒绝(Status_Command Reject)0x60n0:0B -- 状态_警告(Status_Warning)0x60n0:0C -- 状态_错误(Status_Error)0x60n0:0F -- 状态_输入循环计数器(Status_Input Cycle Counter) |