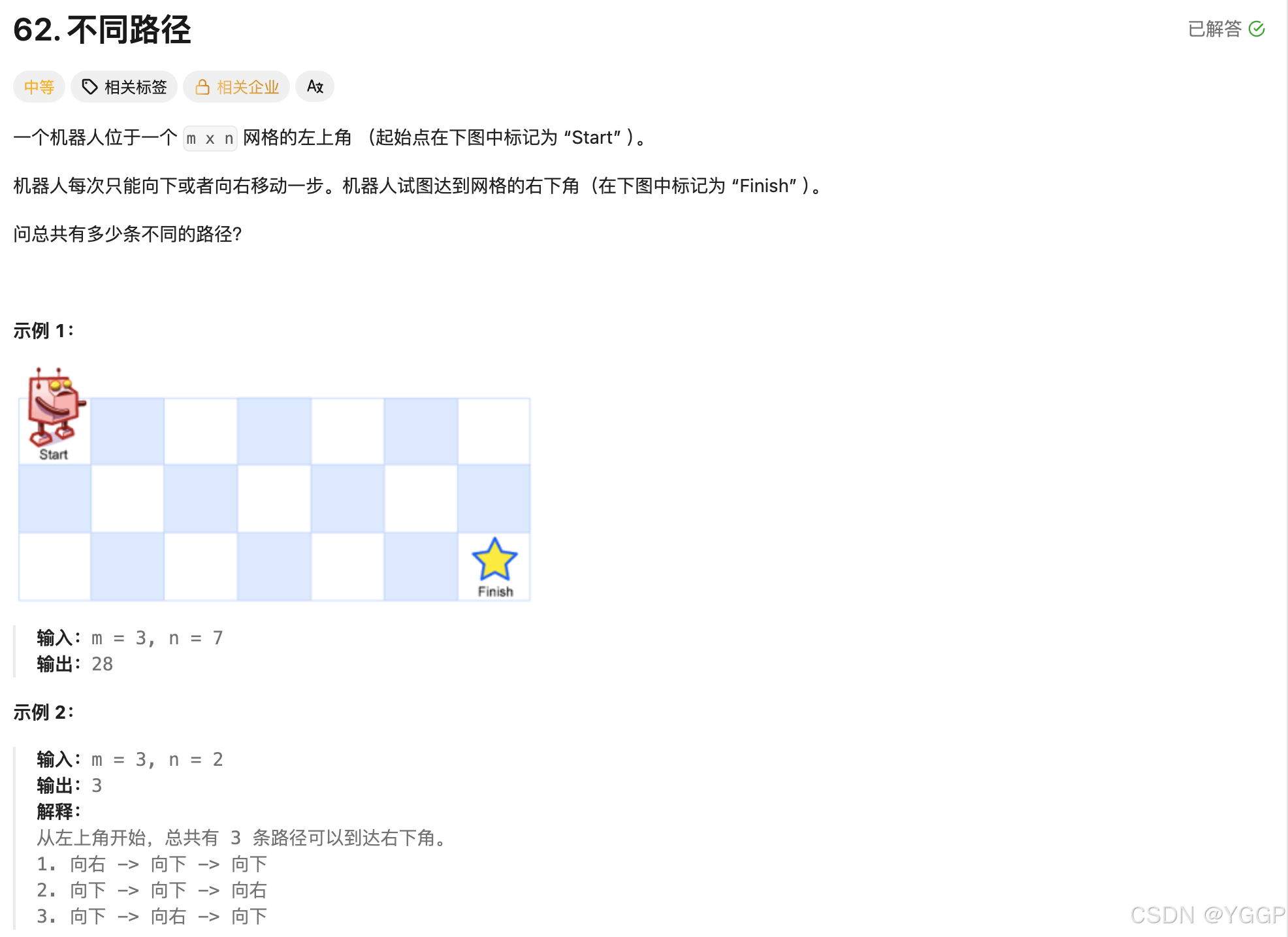
62. 不同路径
题目描述
思路
我们可以使用二维动态规划解决这道题。
具体来说,我们使用二维的dp数组表示从(0, 0)(左上角)走到(i, j)(第i行第j列)共有多少种方案,由于题目当中明确提出,在某个单元格(i, j),只能向下或向右移动一个单位,因此dp[i][j]的状态转移方程就是dp[i][j] = dp[i - 1][j] + dp[i][j - 1](其含义就是,想要走到(i, j)单元格,只可能是从上面移动过来或是从左面移动过来)。
初始时dp数组全为0,因此我们需要给它一个入口。我们定义dp的维度是(m + 1, n + 1),并令dp[0][1]为1,也就是从这个位置进入。
基于此,我们就可以开始编程解决这道问题了。
Golang 题解
go
func uniquePaths(m int, n int) int {
dp := make([][]int, m + 1)
for i := 0; i <= m; i ++ {
dp[i] = make([]int, n + 1)
if i == 0 {
dp[i][1] = 1
}
}
for i := 1; i <= m; i ++ {
for j := 1; j <= n; j ++ {
dp[i][j] = dp[i - 1][j] + dp[i][j - 1]
}
}
return dp[m][n]
}