摘要------本文研究了在存在由振荡器不完美引起的相位噪声(PN)的情况下,基于正交频分复用(OFDM)的雷达通信一体化(JRC)系统的单站雷达感知问题。我们首先针对自由运行振荡器(free-running oscillators,FRO)和锁相环(phase-locked loops,PLL),对雷达接收机中跨越多个 OFDM 符号的相位噪声进行了严格的统计特性描述。基于与时延相关的相位噪声协方差矩阵,我们推导了确定性时延-多普勒参数和随机相位噪声的混合最大似然(ML)/最大后验(MAP)估计器,该问题最终转化为一个极具挑战性的高维非线性优化问题(resulting in a challenging high-dimensional nonlinear optimization problem)。
为了规避相位噪声的非线性,我们随后开发了一种迭代小角度近似(iterated small angle approximation,ISAA)算法,该算法在每次迭代中通过将相位噪声作为时延-多普勒的函数进行闭式更新,从而逐步优化时延-多普勒及相位噪声的估计值。此外,现有的方法通常将相位噪声视为必须消除的纯粹损伤,而我们与其不同,提出利用相位噪声来解决距离模糊问题。具体而言,我们通过构建一个参数化 Toeplitz-块 Toeplitz 协方差矩阵重构问题,利用了相位噪声与时延相关的统计特性(即距离相关效应)。
仿真结果表明,在各种工作条件下,无论是针对 FRO 还是 PLL,ISAA 算法都能快速收敛至混合克拉美罗界(CRB),并且相较于现有的最先进基准算法具有显著的性能增益。同时结果也证实,相位噪声的不利影响可以转化为感知的优势。
索引词------OFDM,雷达通信一体化,相位噪声,利用,迭代小角度近似。
文章目录
-
- [I. INTRODUCTION](#I. INTRODUCTION)
- [II. SYSTEM MODEL AND PROBLEM FORMULATION](#II. SYSTEM MODEL AND PROBLEM FORMULATION)
-
- [A. Transmit Signal Model](#A. Transmit Signal Model)
- [B. Receive Signal Model](#B. Receive Signal Model)
- [C. Fast-Time/Slow-Time Representation With Phase Noise](#C. Fast-Time/Slow-Time Representation With Phase Noise)
- [D. 特例:理想振荡器](#D. 特例:理想振荡器)
- [E. 相位噪声下 OFDM 雷达的问题陈述](#E. 相位噪声下 OFDM 雷达的问题陈述)
- [III. PHASE NOISE STATISTICS](#III. PHASE NOISE STATISTICS)
-
-
- [A. Statistics of Differential Phase Noise Process](#A. Statistics of Differential Phase Noise Process)
- [B. 不同振荡器类型的 PN 方差](#B. 不同振荡器类型的 PN 方差)
- [C. 与时延相关的 PN 协方差矩阵](#C. 与时延相关的 PN 协方差矩阵)
-
- [IV. PROPOSED ALGORITHM FOR DELAY-DOPPLER ESTIMATION UNDER PHASE NOISE](#IV. PROPOSED ALGORITHM FOR DELAY-DOPPLER ESTIMATION UNDER PHASE NOISE)
-
- [A. 混合 ML/MAP 估计器](#A. 混合 ML/MAP 估计器)
I. INTRODUCTION
随着下一代无线系统有望在高频段运行,即毫米波 (mmWave) 频段 11,硬件损伤 (HWIs),例如相位噪声 (PN) 16、功率放大器非线性 (PAN) 和互耦 (MC),可能成为 OFDM DFRC 系统在雷达和通信两方面性能的主要瓶颈 17, 18。特别是,由振荡器不完美引起的 PN 的严重程度 1 ^1 1 会随着工作频率的升高而增加 19, 21。由于其快速时变的特性,PN 需要在子载波级(频域)或样本级(时域)进行动态补偿和缓解处理,从而给 OFDM 通信的信道估计和数据检测带来了巨大挑战 19, 22, 23, 24。为了解决 OFDM 的 PN 补偿问题,已有各种频域 21, 25, 26, 27, 28 和时域 16, 29, 30 的估计方法被提出。
1 ^1 1 作为一种时变损伤,PN 对 DFRC 系统构成的文题比由振荡器非理想性引起的静态损伤(如载波频率偏移 (CFO) 和 I/Q 不平衡 19)严重得多。例如,CFO 对单站感知系统没有影响,因为发送和接收使用的是同一个振荡器 20。
尽管关于 OFDM 通信 中 PN 估计的文献浩如烟海(Despite the vast literature on),但很少有人致力于(very little effort has been devoted to)研究 PN 对 OFDM 雷达 性能的影响(例如 31, 32),更不用说开发算法来估计和补偿雷达感知中的 PN 了。
- 在文献 31 和 32 中,研究了 PN 对 OFDM 雷达距离-速度剖面的影响,结果表明 PN 会导致本底噪声的增加,并在速度轴上产生脊状干扰(ridge along the velocity axis)。
为了支持迈向 6G 网络的新用例,新兴的毫米波感知应用 33, 34, 35, 36 对距离和速度精度提出了严格的要求 37,这使得必须考虑 PN 的影响。从雷达接收处理的角度来看,现有的 OFDM 雷达算法(例如 12, 14, 38, 39, 40, 41)假设振荡器是理想的,因此无法在 PN 影响下,尤其是 PN 方差较大时提供令人满意的性能。
简而言之(In a nutshell),目前尚未有系统的研究来解决带有振荡器 PN 的 OFDM DFRC 系统中的雷达感知问题,也未能推导出联合估计时延、多普勒和 PN 的算法。
作为雷达和通信之间的一个关键区别,所谓的 距离相关效应 (range correlation effect)42, 43, 44, 45 构成了单站雷达感知中 PN 与通信设置中 PN 相比的一个本质特性。由于发射机和接收机的 PN 过程是独立的,通信系统中的 PN 统计特性不依赖于未知的信道参数(例如 16, 19, 46, 47)。
相反,在共用振荡器的雷达收发机中,对来自目标的反射信号进行下变频会导致一个差分(自参考/自相关)PN 过程 48, 49,该过程对应于原始 PN 过程与其经过目标往返时延后的时移版本之间的差值。这种相关效应使得雷达接收机中 PN 的统计特性具有距离依赖性,导致较远目标的 PN 方差更高 43,这给雷达感知既带来了挑战也带来了机遇。
-
主要的挑战在于时延和 PN 是耦合的,使得难以解耦相应的估计任务(而在 OFDM 通信的联合信道/PN 估计中通常是这样做的,例如 29, 50)。
-
另一方面,主要机遇来自于利用这种距离依赖的 PN 统计特性来增强距离估计性能的可能性。虽然 PN 利用 (PN exploitation)可能提供可观的性能增益,但据作者所知,无论是在标准雷达文献(即调频连续波 (FMCW)、多输入多输出 (MIMO) 或脉冲雷达)中,还是在 OFDM DFRC 研究中,这一主题仍然令人惊讶地未被探索(this topic remains surprisingly unexplored)。
鉴于现有的文献(In light of the existing literature),关于存在 PN 时 OFDM DFRC 系统的感知功能,出现了几个基本问题:
- 对于不同类型的振荡器,即自由运行振荡器 (FROs) 和锁相环 (PLLs) 25, 48,OFDM 雷达接收机中 PN 的统计特性是什么?
- 我们如何开发强大的算法来联合估计时延、多普勒和 PN,以 缓解 PN 对感知性能的影响?FRO 和 PLL 如何影响时延和多普勒估计的性能?
- 考虑到距离相关效应,是否可能 利用 PN 来提高测距性能,使其超越使用无 PN 理想振荡器所能达到的性能?
为了试图回答这些问题(In an attempt to answer these questions),本文研究了在面临振荡器 PN 时 OFDM DFRC 系统中的雷达时延-多普勒估计问题。
- 我们首先推导了针对 FRO 和 PLL 的 OFDM 雷达观测中 PN 的统计特性。
- 然后,我们提出了一种基于混合最大似然 (ML)/MAP 估计器代价函数中 PN 迭代小角度近似的新型算法,用于联合估计时延、多普勒和 PN,该算法能够快速收敛到相应的理论界限。
- 此外,我们开发了一种 PN 利用方法,可以有效地利用距离依赖的 PN 统计特性来解决距离模糊问题。
本文的主要贡献总结如下:
-
PN 下 OFDM 雷达感知的问题公式化:我们在文献中首次研究了振荡器 PN 影响下 OFDM DFRC 系统中的单站雷达感知问题。为了提供严格的问题公式化,我们推导了 OFDM 雷达接收机中 PN 的显式统计特性描述。我们考虑了两种常用的振荡器模型,即 FRO 和 PLL。推导揭示了前者的 PN 协方差矩阵具有块对角结构,而后者具有更一般的 Toeplitz-块 Toeplitz 结构。
-
通过迭代小角度近似算法实现的混合 ML/MAP 估计器:我们推导了包含多个符号的 OFDM 帧上的确定性时延-多普勒参数和随机 PN 的混合 ML/MAP 估计器。反向散射信号中 PN 的协方差矩阵取决于未知的时延。为了处理由此产生的代价函数的高度非线性,我们提出了一种新颖的迭代小角度近似 (ISAA) 方法,该方法在每次迭代中调用当前 PN 估计值周围的小 PN 近似,逐步优化时延-多普勒-PN 的估计并最小化残余 PN 的影响。所提出的方法实现了作为时延-多普勒函数的 PN 的闭式更新,并通过交替迭代显著提高了 PN 跟踪精度。
-
利用 PN 解决距离模糊:基于 PN 通过其距离依赖的统计特性携带了有价值的时延信息这一关键见解,我们开发了一种解决距离模糊的算法,该算法利用了所提出的 ISAA 方法输出的 PN 估计值的统计特性。这种 PN 利用方法通过利用 Toeplitz-块 Toeplitz 结构,将距离估计公式化为一个参数化协方差矩阵重构问题,并能够通过 PN 协方差在距离上不存在模糊性这一事实(与由 OFDM 子载波间隔决定的基本上限相反 12, 39, 51)产生无模糊的距离估计。
-
仿真分析 :在各种工作条件下进行的大量仿真表明,所提出的 ISAA 算法仅需几次迭代即可快速收敛到相应的关于时延-多普勒-PN 估计的混合克拉美罗界 (CRBs) 52, 53,并且性能显著优于基准 FFT 方法 12, 39, 40。在更高的信噪比 (SNR)、更大的 3 dB 振荡器带宽、更小的环路带宽(针对 PLL)以及更远的目标距离下,精度增益更为明显。此外,我们发现 PLL 对多普勒估计比 FRO 更有利,这是因为 PLL 存在慢时间 PN 相关性。此外,在特定的 SNR 水平之上,PN 利用算法显示出能够正确识别距离模糊目标的真实距离,并且实现了比使用无 PN 观测值的 FFT 方法高得多的测距精度,从而将 PN 转化为感知的优势 2 ^2 2。
符号说明: Π X = X ( X H X ) − 1 X H \mathbf{\Pi}{\mathbf{X}} = \mathbf{X}(\mathbf{X}^H \mathbf{X})^{-1}\mathbf{X}^H ΠX=X(XHX)−1XH 表示向 X \mathbf{X} X 的列空间的正交投影,而 Π X ⊥ = I − Π X \mathbf{\Pi}{\mathbf{X}}^{\perp} = \mathbf{I} - \mathbf{\Pi}{\mathbf{X}} ΠX⊥=I−ΠX。 ⊙ \odot ⊙ 和 ⊗ \otimes ⊗ 分别表示阿达玛 (Hadamard) 积和克罗内克 (Kronecker) 积。 d i a g ( x ) \mathrm{diag}(\mathbf{x}) diag(x) 输出一个以向量 x \mathbf{x} x 的元素为对角线的对角矩阵, d i a g ( X ) \mathrm{diag}(\mathbf{X}) diag(X) 表示一个以方阵 X \mathbf{X} X 的对角元素为对角线的对角矩阵, v e c ( ⋅ ) \mathrm{vec}(\cdot) vec(⋅) 表示矩阵向量化算子, r e s h a p e N , M ( ⋅ ) \mathrm{reshape}{N, M}(\cdot) reshapeN,M(⋅) 将一个向量重塑为一个 N × M N \times M N×M 的矩阵。
II. SYSTEM MODEL AND PROBLEM FORMULATION
考虑一个由 DFRC 收发机和一个通信接收机 (RX) 组成的 OFDM JRC 系统,如图 1 所示。DFRC 收发机在单个硬件平台上配备了雷达通信发射机 (TX)(即传统的 OFDM TX)和雷达 RX,它向通信 RX 发送数据符号,同时利用后向散射信号执行单站雷达感知,以完成各种雷达任务(例如,目标检测、估计、跟踪和分类)2, 8, 12。
为了实现全双工操作且不对雷达 RX 造成自干扰,我们假设 DFRC 收发处的 TX/RX 天线具有足够的隔离度和去耦 6, 12, 39, 54, 55, 56。在通信 RX 处,常规的 OFDM 接收操作(例如,信道估计、频率同步、数据检测 24)照常执行,不受感知功能的任何约束。
此外,DFRC 收发机的振荡器(在联合设计的硬件平台上由 TX 和雷达 RX 共享)被假设为非理想的,并且由于不完美而受到 PN 的损伤 19, 21, 25, 46, 57。
在本节中,我们推导了存在 PN 时的 OFDM 发射和雷达接收信号模型,并建立了由此产生的 OFDM 雷达感知问题。我们注意到,本文将重点关注 PN 下的雷达感知,而假设通信 RX 通过成熟的方法(例如 16, 22, 30, 58)来补偿 PN。
A. Transmit Signal Model
我们考虑一个包含 M M M 个符号和 N N N 个子载波的 OFDM 通信帧。一个符号的总持续时间由 T s y m = T c p + T T_{\mathrm{sym}} = T_{\mathrm{cp}} + T Tsym=Tcp+T 给出,其中 T c p T_{\mathrm{cp}} Tcp 和 T T T 分别表示循环前缀 (CP) 和基本符号持续时间 12。此外, Δ f = 1 / T \Delta f = 1/T Δf=1/T 是子载波间隔,导致总带宽为 N Δ f = B N\Delta f = B NΔf=B。复基带 OFDM 发射信号可以表示为 13
s ( t ) = ∑ m = 0 M − 1 s m ( t ) , (1) s(t) = \sum_{m=0}^{M-1} s_m(t), \tag{1} s(t)=m=0∑M−1sm(t),(1)
其中
s m ( t ) = 1 N ∑ n = 0 N − 1 x n , m e j 2 π n Δ f t r e c t ( t − m T s y m T s y m ) (2) s_m(t) = \frac{1}{\sqrt{N}} \sum_{n=0}^{N-1} x_{n,m} e^{j2\pi n \Delta f t} \mathrm{rect}\left( \frac{t - m T_{\mathrm{sym}}}{T_{\mathrm{sym}}} \right) \tag{2} sm(t)=N 1n=0∑N−1xn,mej2πnΔftrect(Tsymt−mTsym)(2)
是第 m m m 个符号的 OFDM 信号, x n , m x_{n,m} xn,m 表示第 m m m 个符号的第 n n n 个子载波上的复数据符号, r e c t ( t ) \mathrm{rect}(t) rect(t) 是一个矩形脉冲,当 t ∈ 0 , 1 t \in 0, 1 t∈0,1 时取值为 1 1 1,否则为 0 0 0。在振荡器存在 PN 的情况下,这块 M M M 个符号在 t ∈ 0 , M T s y m t \in 0, MT_{\\mathrm{sym}} t∈0,MTsym 期间的上变频发射信号(the upconverted transmit signal)可以写为 49
s ~ ( t ) = ℜ { s ( t ) e j 2 π f c t + ϕ ( t ) } , (3) \widetilde{s}(t) = \Re \left\{ s(t) e^{j2\\pi f_c t + \\phi(t)} \right\}, \tag{3} s (t)=ℜ{s(t)ej2πfct+ϕ(t)},(3)
其中 f c f_c fc 是(is)载波频率, ϕ ( t ) \phi(t) ϕ(t) 表示(denotes)振荡器中的 PN 过程。
B. Receive Signal Model
在雷达感知中,我们假设远场存在一个点目标,其具有往返时延 τ = 2 R / c \tau = 2R/c τ=2R/c,归一化多普勒频移 ν = 2 v / c \nu = 2v/c ν=2v/c 以及复信道增益 α \alpha α(包含路径损耗和雷达散射截面效应)。在此, R , v R, v R,v 和 c c c 分别表示距离、径向速度和传播速度。给定 (3) 中的发射信号模型,雷达接收机处的通带后向散射信号可以表示为
y ~ ( t ) = ℜ { α s ( t − τ ( t ) ) e j 2 π f c ( t − τ ( t ) ) + ϕ ( t − τ ( t ) ) } , (4) \widetilde{y}(t) = \Re\left\{\alpha s(t - \tau(t))e^{j2\\pi f_c(t-\\tau(t))+\\phi(t-\\tau(t))}\right\}, \tag{4} y (t)=ℜ{αs(t−τ(t))ej2πfc(t−τ(t))+ϕ(t−τ(t))},(4)
其中 τ ( t ) = τ − ν t \tau(t) = \tau - \nu t τ(t)=τ−νt 是由多普勒频移引起的时变时延。通过有噪声的振荡器对 (4) 中的通带信号进行下变频后(对应于乘以 e − j ( 2 π f c t + ϕ ( t ) ) e^{-j(2\pi f_c t + \phi(t))} e−j(2πfct+ϕ(t)) 59),等效复基带信号可以写为 44
y ( t ) = α s ( t − τ ( t ) ) e j 2 π f c ( t − τ ( t ) ) + ϕ ( t − τ ( t ) ) e − j 2 π f c t + ϕ ( t ) = α s ( t − τ ( t ) ) e − j 2 π f c τ e j 2 π f c ν t e j ϕ ( t − τ ( t ) ) − ϕ ( t ) . (5) \begin{aligned} y(t) &= \alpha s(t - \tau(t))e^{j2\\pi f_c(t-\\tau(t))+\\phi(t-\\tau(t))}e^{-j2\\pi f_c t+\\phi(t)} \\ &= \alpha s(t - \tau(t))e^{-j2\pi f_c \tau} e^{j2\pi f_c \nu t} e^{j\\phi(t-\\tau(t))-\\phi(t)}. \end{aligned} \tag{5} y(t)=αs(t−τ(t))ej2πfc(t−τ(t))+ϕ(t−τ(t))e−j2πfct+ϕ(t)=αs(t−τ(t))e−j2πfcτej2πfcνtejϕ(t−τ(t))−ϕ(t).(5)
- ( t − τ ( t ) ) (t - \tau(t)) (t−τ(t)) (核心变量:往返时延):
- 这是公式中最关键的变量。雷达在时刻 t t t 接收到的信号,并不是时刻 t t t 发出的,而是时刻 t − τ ( t ) t - \tau(t) t−τ(t) 发出的。
- τ ( t ) \tau(t) τ(t) 是时变时延。因为目标在运动(有多普勒速度),所以信号飞行的距离在变化,导致时延 τ \tau τ 也是时间 t t t 的函数。
- e j ... e^{j\\dots} ej... (载波与相位项):这里面包含了三个频率/相位成分的延迟版本:
2 π f c ( t − τ ( t ) ) 2\pi f_c (t - \tau(t)) 2πfc(t−τ(t)):这是载波相位。
- 发射时载波是 e j 2 π f c t e^{j2\pi f_c t} ej2πfct。
- 接收时,我们收到的是 τ ( t ) \tau(t) τ(t) 时刻之前的载波状态,
- 所以 t t t 变成了 t − τ ( t ) t-\tau(t) t−τ(t)。正是这一项展开后产生了多普勒频移( e − j 2 π f c τ ( t ) = e − j 2 π f c ( τ − ν t ) = Const ⋅ e j 2 π f c ν t e^{-j2\pi f_c \tau(t)} = e^{-j2\pi f_c (\tau - \nu t)} = \text{Const} \cdot e^{j2\pi f_c \nu t} e−j2πfcτ(t)=e−j2πfc(τ−νt)=Const⋅ej2πfcνt)。
ϕ ( t − τ ( t ) ) \phi(t - \tau(t)) ϕ(t−τ(t)) (相位噪声):
- 这是本论文的研究重点。相位噪声 ϕ ( t ) \phi(t) ϕ(t) 是振荡器自带的随机抖动。
- 关键点:雷达在时刻 t t t "听到"的相位噪声,不是接收机当前时刻 t t t 的振荡器噪声,而是发射机在过去时刻 t − τ ( t ) t-\tau(t) t−τ(t) 发射信号那一瞬间附带在信号上的噪声。
主要关注车载 JRC 场景,我们假设归一化多普勒频移满足 ∣ ν ∣ ≪ 1 / N |\nu| \ll 1/N ∣ν∣≪1/N 14, 20, 38,其中对于典型的车载 OFDM JRC 系统, ∣ ν ∣ ≪ 10 − 6 |\nu| \ll 10^{-6} ∣ν∣≪10−6(对应于速度 ∣ v ∣ ≪ 540 |v| \ll 540 ∣v∣≪540 km/h),而 N N N 的数量级为 10 3 10^3 103。这允许我们将 (5) 中的相位噪声项近似为 ϕ ( t − τ ( t ) ) ≈ ϕ ( t − τ ) \phi(t - \tau(t)) \approx \phi(t - \tau) ϕ(t−τ(t))≈ϕ(t−τ)。此外,时间-带宽积 B M T s y m BMT_{\mathrm{sym}} BMTsym 足够小,可以(连同 ∣ ν ∣ ≪ 1 / N |\nu| \ll 1/N ∣ν∣≪1/N 一起)证明窄带近似 s ( t − τ ( t ) ) ≈ s ( t − τ ) s(t - \tau(t)) \approx s(t - \tau) s(t−τ(t))≈s(t−τ) 51 的合理性。在此设置下,(5) 中的接收信号变为
y ( t ) = α s ( t − τ ) e − j 2 π f c τ e j 2 π f c ν t w ( t , τ ) , (6) y(t) = \alpha s(t - \tau)e^{-j2\pi f_c \tau} e^{j2\pi f_c \nu t} w(t, \tau), \tag{6} y(t)=αs(t−τ)e−j2πfcτej2πfcνtw(t,τ),(6)
其中乘性相位噪声过程表示为
w ( t , τ ) ≜ e j ϕ ( t − τ ) − ϕ ( t ) . (7) w(t, \tau) \triangleq e^{j\\phi(t-\\tau)-\\phi(t)}. \tag{7} w(t,τ)≜ejϕ(t−τ)−ϕ(t).(7)
(7) 中相位噪声过程 ϕ ( t − τ ) − ϕ ( t ) \phi(t - \tau) - \phi(t) ϕ(t−τ)−ϕ(t) 的统计特性将在第三节中推导。
C. Fast-Time/Slow-Time Representation With Phase Noise
对于第 m m m 个符号,我们移除 CP 并在 t = m T s y m + T c p + ℓ T / N t = m T_{\mathrm{sym}} + T_{\mathrm{cp}} + \ell T / N t=mTsym+Tcp+ℓT/N(其中 ℓ = 0 , ... , N − 1 \ell = 0, \ldots, N-1 ℓ=0,...,N−1)处对 (6) 中的 y ( t ) y(t) y(t) 进行采样。采用标准的 OFDM 雷达假设 T c p ≥ τ T_{\mathrm{cp}} \geq \tau Tcp≥τ 1, 38, 39(CP 持续时间设置为长于最远目标的往返时延)和 f c T ν ≪ 1 f_c T \nu \ll 1 fcTν≪1 15, 60, 61, 62(多普勒频移 f c ν f_c \nu fcν 与子载波间隔 Δ f \Delta f Δf 相比很小),并忽略常数相位项,第 m m m 个符号的接收信号可以写为 14, 20
y ℓ , m = α e j 2 π f c m T s y m ν w ℓ , m ( τ ) × 1 N ∑ n = 0 N − 1 x n , m e j 2 π n ℓ N e − j 2 π n Δ f τ , (8) y_{\ell, m} = \alpha e^{j 2 \pi f_c m T_{\mathrm{sym}} \nu} w_{\ell, m}(\tau) \times \frac{1}{\sqrt{N}} \sum_{n=0}^{N-1} x_{n, m} e^{j 2 \pi n \frac{\ell}{N}} e^{-j 2 \pi n \Delta f \tau}, \tag{8} yℓ,m=αej2πfcmTsymνwℓ,m(τ)×N 1n=0∑N−1xn,mej2πnNℓe−j2πnΔfτ,(8)
其中 w ℓ , m ( τ ) w_{\ell, m}(\tau) wℓ,m(τ) 是 (6) 中 PN 项 w ( t , τ ) w(t, \tau) w(t,τ) 在 t = m T s y m + T c p + ℓ T / N t = m T_{\mathrm{sym}} + T_{\mathrm{cp}} + \ell T / N t=mTsym+Tcp+ℓT/N 处的采样版本。令
b ( τ ) ≜ 1 , e − j 2 π Δ f τ , ... , e − j 2 π ( N − 1 ) Δ f τ T , (9) \mathbf{b}(\tau) \triangleq \left 1, e\^{-j 2 \\pi \\Delta f \\tau}, \\ldots, e\^{-j 2 \\pi(N-1) \\Delta f \\tau} \\right^T, \tag{9} b(τ)≜1,e−j2πΔfτ,...,e−j2π(N−1)ΔfτT,(9) c ( ν ) ≜ 1 , e − j 2 π f c T s y m ν , ... , e − j 2 π f c ( M − 1 ) T s y m ν T , (10) \mathbf{c}(\nu) \triangleq \left 1, e\^{-j 2 \\pi f_c T_{\\mathrm{sym}} \\nu}, \\ldots, e\^{-j 2 \\pi f_c(M-1) T_{\\mathrm{sym}} \\nu} \\right^T, \tag{10} c(ν)≜1,e−j2πfcTsymν,...,e−j2πfc(M−1)TsymνT,(10)
分别表示频域和时间(慢时间)导向矢量。
对 (8) 中的观测值在快时间 ℓ \ell ℓ 和慢时间 m m m 上进行聚合,并考虑到加性传感器噪声的存在,可以得到存在 PN 时的快时间/慢时间观测矩阵为 20
Y = α W ⊙ F N H ( X ⊙ b ( τ ) c H ( ν ) ) + Z , (11) \mathbf{Y} = \alpha \mathbf{W} \odot \mathbf{F}_N^H \left( \mathbf{X} \odot \mathbf{b}(\tau) \mathbf{c}^H(\nu) \right) + \mathbf{Z}, \tag{11} Y=αW⊙FNH(X⊙b(τ)cH(ν))+Z,(11)
其中
- W ∈ C N × M \mathbf{W} \in \mathbb{C}^{N \times M} W∈CN×M(其元素为 W ℓ , m ≜ w ℓ , m ( τ ) \\mathbf{W}{\ell, m} \triangleq w{\ell, m}(\tau) Wℓ,m≜wℓ,m(τ))是由 (7) 中 PN 过程的快时间/慢时间样本组成的 乘性 PN 矩阵 3 ^3 3,
- F N ∈ C N × N \mathbf{F}N \in \mathbb{C}^{N \times N} FN∈CN×N 是酉 DFT 矩阵,其元素为 F N ℓ , n = 1 N e − j 2 π n ℓ N \\mathbf{F}_N{\ell, n} = \frac{1}{\sqrt{N}} e^{-j 2 \pi n \frac{\ell}{N}} FNℓ,n=N 1e−j2πnNℓ,
- X ∈ C N × M \mathbf{X} \in \mathbb{C}^{N \times M} X∈CN×M 包含复数据符号,其元素为 X n , m ≜ x n , m \\mathbf{X}{n, m} \triangleq x{n, m} Xn,m≜xn,m,
- Y ∈ C N × M \mathbf{Y} \in \mathbb{C}^{N \times M} Y∈CN×M 的元素为 Y ℓ , m ≜ y ℓ , m \\mathbf{Y}{\ell, m} \triangleq y{\ell, m} Yℓ,m≜yℓ,m,
- 而 Z ∈ C N × M \mathbf{Z} \in \mathbb{C}^{N \times M} Z∈CN×M 是加性高斯白噪声 (AWGN),满足 v e c ( Z ) ∼ C N ( 0 , 2 σ 2 I ) \mathrm{vec}(\mathbf{Z}) \sim \mathcal{CN}(\mathbf{0}, 2 \sigma^2 \mathbf{I}) vec(Z)∼CN(0,2σ2I)。
正如从 (11) 中观察到的那样,PN 分量 W \mathbf{W} W 在 OFDM 雷达中引入了载波间干扰 (ICI) 14, 20, 51(类似于其在 OFDM 通信中的影响 16, 19, 21, 25),并且可能会严重降低时延-多普勒估计的性能。
从公式 (8) 到 (11) 的矩阵化推导
1. 定义矩阵与向量
根据索引 ( n , m ) (n, m) (n,m) 和 ( ℓ , m ) (\ell, m) (ℓ,m) 定义以下矩阵元素:
- 数据矩阵 X ∈ C N × M \mathbf{X} \in \mathbb{C}^{N \times M} X∈CN×M: X n , m = x n , m \\mathbf{X}{n,m} = x{n,m} Xn,m=xn,m
- 时延导向矢量 b ( τ ) \mathbf{b}(\tau) b(τ): b ( τ ) n = e − j 2 π n Δ f τ \\mathbf{b}(\\tau)_n = e^{-j 2 \pi n \Delta f \tau} b(τ)n=e−j2πnΔfτ
- 多普勒导向矢量 c ( ν ) \mathbf{c}(\nu) c(ν): c ( ν ) m = e − j 2 π f c m T s y m ν \\mathbf{c}(\\nu)m = e^{-j 2 \pi f_c m T{\mathrm{sym}} \nu} c(ν)m=e−j2πfcmTsymν (注意 c H \mathbf{c}^H cH 引入共轭)
- 相位噪声矩阵 W \mathbf{W} W: W ℓ , m = w ℓ , m ( τ ) \\mathbf{W}{\ell, m} = w{\ell, m}(\tau) Wℓ,m=wℓ,m(τ)
2. 频域信号重构 (Hadamard 积)
分析公式 (8) 中的频域核心项,其由数据、时延相移和多普勒相移组成:
Term n , m = x n , m ⋅ e − j 2 π n Δ f τ ⏟ b n ⋅ e j 2 π f c m T s y m ν ⏟ c H m \text{Term}{n,m} = x{n,m} \cdot \underbrace{e^{-j 2 \pi n \Delta f \tau}}{\\mathbf{b}n} \cdot \underbrace{e^{j 2 \pi f_c m T{\mathrm{sym}} \nu}}{\\mathbf{c}\^H_m} Termn,m=xn,m⋅bn e−j2πnΔfτ⋅cHm ej2πfcmTsymν这对应于数据矩阵 X \mathbf{X} X 与时延-多普勒秩-1矩阵的点乘:
A = X ⊙ ( b ( τ ) c H ( ν ) ) \mathbf{A} = \mathbf{X} \odot \left( \mathbf{b}(\tau) \mathbf{c}^H(\nu) \right) A=X⊙(b(τ)cH(ν))3. 时域变换 (IDFT)
公式 (8) 中对 n n n 的求和 1 N ∑ n = 0 N − 1 ( ... ) e j 2 π n ℓ N \frac{1}{\sqrt{N}} \sum_{n=0}^{N-1} (\dots) e^{j 2 \pi n \frac{\ell}{N}} N 1∑n=0N−1(...)ej2πnNℓ 等效于对矩阵 A \mathbf{A} A 的每一列执行 IDFT 操作。这在矩阵代数中表示为左乘 IDFT 矩阵 F N H \mathbf{F}N^H FNH。 F N \mathbf{F}N FN 是标准 DFT 矩阵,其元素为 F N ℓ , n = 1 N e − j 2 π n ℓ N \\mathbf{F}_N{\ell, n} = \frac{1}{\sqrt{N}} e^{-j 2 \pi n \frac{\ell}{N}} FNℓ,n=N 1e−j2πnNℓ,则其共轭转置 F N H ℓ , n \\mathbf{F}_N\^H{\ell, n} FNHℓ,n 的元素为 1 N e j 2 π n ℓ N \frac{1}{\sqrt{N}} e^{j 2 \pi n \frac{\ell}{N}} N 1ej2πnNℓ:
G = F N H A = F N H ( X ⊙ b ( τ ) c H ( ν ) ) \mathbf{G} = \mathbf{F}_N^H \mathbf{A} = \mathbf{F}_N^H \left( \mathbf{X} \odot \mathbf{b}(\tau) \mathbf{c}^H(\nu) \right) G=FNHA=FNH(X⊙b(τ)cH(ν))4. 时域加权与噪声 (最终组合)
公式 (8) 的外部项为幅度 α \alpha α 和时变相位噪声 w ℓ , m w_{\ell, m} wℓ,m,这对应于在时域矩阵上进行点乘 (Hadamard 积)。考虑到加性噪声矩阵 Z \mathbf{Z} Z,接收信号矩阵为:
Y = α W ⊙ G + Z \mathbf{Y} = \alpha \mathbf{W} \odot \mathbf{G} + \mathbf{Z} Y=αW⊙G+Z将步骤 3 中的 G \mathbf{G} G 代入,即得到最终的紧凑矩阵形式公式 (11):
Y = α W ⊙ F N H ( X ⊙ b ( τ ) c H ( ν ) ) + Z (11) \mathbf{Y} = \alpha \mathbf{W} \odot \mathbf{F}_N^H \left( \mathbf{X} \odot \mathbf{b}(\tau) \mathbf{c}^H(\nu) \right) + \mathbf{Z} \tag{11} Y=αW⊙FNH(X⊙b(τ)cH(ν))+Z(11)
D. 特例:理想振荡器
为了将 (11) 中推导出的信号模型与文献中常用的模型联系起来,我们研究了理想振荡器的特例,其中不存在 PN 过程,即 ϕ ( t ) = 0 , ∀ t \phi(t) = 0, \forall t ϕ(t)=0,∀t,这得出 w ( t , τ ) = 1 , ∀ t , τ w(t, \tau) = 1, \forall t, \tau w(t,τ)=1,∀t,τ,并且 W \mathbf{W} W 变为全 1 矩阵,即 W = 1 N × M \mathbf{W} = \mathbf{1}_{N \times M} W=1N×M。在这种情况下,(11) 恢复为无 PN 模型
Y P N − f r e e = α F N H ( X ⊙ b ( τ ) c H ( ν ) ) + Z . (12) \mathbf{Y}^{\mathrm{PN-free}} = \alpha \mathbf{F}_N^H \left( \mathbf{X} \odot \mathbf{b}(\tau)\mathbf{c}^H(\nu) \right) + \mathbf{Z}. \tag{12} YPN−free=αFNH(X⊙b(τ)cH(ν))+Z.(12)
遵循 OFDM 雷达接收机的传统处理链 12, 39, 40(Following the traditional processing chain for OFDM radar receivers),我们对 (12) 中 Y P N − f r e e \mathbf{Y}^{\mathrm{PN-free}} YPN−free 的列进行 DFT,以便从快时间/慢时间域切换到频率/慢时间域,并获得标准的 OFDM 雷达观测值(obtain the standard OFDM
radar observations) 12, 15, 39, 40, 60, 61:
Y ~ = F N Y P N − f r e e = α X ⊙ b ( τ ) c H ( ν ) + F N Z , (13) \widetilde{\mathbf{Y}} = \mathbf{F}_N \mathbf{Y}^{\mathrm{PN-free}} = \alpha \mathbf{X} \odot \mathbf{b}(\tau)\mathbf{c}^H(\nu) + \mathbf{F}_N \mathbf{Z}, \tag{13} Y =FNYPN−free=αX⊙b(τ)cH(ν)+FNZ,(13)
其中 v e c ( F N Z ) ∼ C N ( 0 , 2 σ 2 I ) \mathrm{vec}(\mathbf{F}_N \mathbf{Z}) \sim \mathcal{CN}(\mathbf{0}, 2\sigma^2\mathbf{I}) vec(FNZ)∼CN(0,2σ2I)。显然,(13) 不涉及任何 ICI 效应,因此适合采用传统的时延-多普勒估计算法(在去除 X \mathbf{X} X 的影响后),例如时间和频率域上的二维 DFT 12, 39, 40 和超分辨率方法 60, 61。
E. 相位噪声下 OFDM 雷达的问题陈述
给定发射数据符号 X \mathbf{X} X 和 (11) 中的快时间/慢时间观测值 Y \mathbf{Y} Y,存在 PN 时的 OFDM 雷达感知感兴趣的问题是估计目标参数 α , τ \alpha, \tau α,τ 和 ν \nu ν,这本质上涉及估计 PN 矩阵 W \mathbf{W} W 并补偿其对 Y \mathbf{Y} Y 的影响。为了解决这个问题,我们首先在第三节中推导 PN 过程的统计特性,然后在第四节中利用这些特性提出一种联合估计时延、多普勒和 PN 的新算法。在第五节中,我们将进一步利用 PN 作为对雷达感知有益的因素。
III. PHASE NOISE STATISTICS
本节提供(provides)了 (7) 中 PN 过程 ϕ ( t − τ ) − ϕ ( t ) \phi(t - \tau) - \phi(t) ϕ(t−τ)−ϕ(t) 的统计特性描述,给出了(gives expressions of)不同类型振荡器的 PN 方差表达式,并推导了(derives) PN 协方差矩阵的结构。
A. Statistics of Differential Phase Noise Process
令 ϕ ( t ) \phi(t) ϕ(t) 为均值为零、方差为 σ ϕ 2 ( t ) \sigma_{\phi}^2(t) σϕ2(t) 的高斯随机过程 30, 49,即
ϕ ( t ) ∼ N ( 0 , σ ϕ 2 ( t ) ) , (14) \phi(t) \sim \mathcal{N}(0, \sigma_{\phi}^2(t)), \tag{14} ϕ(t)∼N(0,σϕ2(t)),(14)
其中 σ ϕ 2 ( t ) \sigma_{\phi}^2(t) σϕ2(t) 的形式取决于振荡器的类型。我们将 差分 PN (differential PN,DPN) 过程 63(也称为 自参考 PN 、增量 PN 过程 48 或 PN 变化 49)定义为
ξ ( t , τ ) ≜ ϕ ( t ) − ϕ ( t − τ ) . (15) \xi(t, \tau) \triangleq \phi(t) - \phi(t - \tau). \tag{15} ξ(t,τ)≜ϕ(t)−ϕ(t−τ).(15)
由于 DPN 过程是平稳的,其统计特性仅取决于增量值(目标时延) τ \tau τ 48, Sec. IV。因此,DPN 过程的统计特性可以描述为 49
ξ ( t , τ ) ∼ N ( 0 , σ ξ 2 ( τ ) ) , (16) \xi(t, \tau) \sim \mathcal{N}(0, \sigma_{\xi}^2(\tau)), \tag{16} ξ(t,τ)∼N(0,σξ2(τ)),(16)
其中 σ ξ 2 ( τ ) \sigma_{\xi}^2(\tau) σξ2(τ) 是 ξ ( t , τ ) \xi(t, \tau) ξ(t,τ) 与时延相关的方差。以下引理提供了 ξ ( t , τ ) \xi(t, \tau) ξ(t,τ) 的二阶统计量。
引理 1 :(15) 中 DPN 过程 ξ ( t , τ ) \xi(t, \tau) ξ(t,τ) 的相关函数由下式给出
R ξ ξ ( Δ t , τ ) = R ξ ξ ( t 1 , t 2 , τ ) ≜ E ξ ( t 1 , τ ) ξ ( t 2 , τ ) = σ ξ 2 ( τ + Δ t ) + σ ξ 2 ( τ − Δ t ) 2 − σ ξ 2 ( Δ t ) , (17) \begin{aligned} R_{\xi\xi}(\Delta t, \tau) &= R_{\xi\xi}(t_1, t_2, \tau) \triangleq \mathbb{E}\left \\xi(t_1, \\tau)\\xi(t_2, \\tau) \\right \\ &= \frac{\sigma_{\xi}^2(\tau + \Delta t) + \sigma_{\xi}^2(\tau - \Delta t)}{2} - \sigma_{\xi}^2(\Delta t), \end{aligned} \tag{17} Rξξ(Δt,τ)=Rξξ(t1,t2,τ)≜Eξ(t1,τ)ξ(t2,τ)=2σξ2(τ+Δt)+σξ2(τ−Δt)−σξ2(Δt),(17)其中 Δ t ≜ t 1 − t 2 \Delta t \triangleq t_1 - t_2 Δt≜t1−t2 是时间差。
证明:请参阅补充材料中的 S-I 节。
B. 不同振荡器类型的 PN 方差
引理 1 允许我们根据与时延相关的方差函数 σ ξ 2 ( τ ) \sigma_{\xi}^2(\tau) σξ2(τ) 来计算 ξ ( t , τ ) \xi(t, \tau) ξ(t,τ) 的相关性。我们现在通过区分振荡器的两种实现形式,即自由运行振荡器 (FRO) 和锁相环 (PLL) 合成器 25, 48,来提供 σ ξ 2 ( τ ) \sigma_{\xi}^2(\tau) σξ2(τ) 的表达式。
- 自由运行振荡器 (FROs) :对于 FRO,(16) 中 DPN ξ ( t , τ ) \xi(t, \tau) ξ(t,τ) 的方差由下式给出 48, Sec. V, 49, Sec. V, VI, 25, Sec. III-A
σ ξ 2 ( τ ) = 4 π f 3 d B ∣ τ ∣ , (18) \sigma_{\xi}^2(\tau) = 4\pi f_{3\,\mathrm{dB}} |\tau|, \tag{18} σξ2(τ)=4πf3dB∣τ∣,(18)
其中 f 3 d B f_{3\,\mathrm{dB}} f3dB 是洛伦兹振荡器(Lorentzian oscillator)频谱的 3 dB 带宽。
- 锁相环 (PLL) 合成器:对于 PLL 架构,(16) 中与时延相关的方差可以表示为 48, Sec. VII-A, 49, Sec. III
σ ξ 2 ( τ ) = 2 f 3 d B f l o o p ( 1 − e − 2 π f l o o p ∣ τ ∣ ) , (19) \sigma_{\xi}^2(\tau) = \frac{2 f_{3\,\mathrm{dB}}}{f_{\mathrm{loop}}} \left( 1 - e^{-2\pi f_{\mathrm{loop}} |\tau|} \right), \tag{19} σξ2(τ)=floop2f3dB(1−e−2πfloop∣τ∣),(19)
其中 f l o o p f_{\mathrm{loop}} floop 表示 PLL 的环路带宽。
我们注意到,随着 f l o o p f_{\mathrm{loop}} floop 的减小,PLL 退化为 FRO,即当 f l o o p → 0 f_{\mathrm{loop}} \to 0 floop→0 时,(19) 收敛至 (18)。利用表达式 (18) 和 (19),可以通过 (16) 和 (17) 获得针对 FRO 和 PLL 的 ξ ( t , τ ) \xi(t, \tau) ξ(t,τ) 的完整统计特性描述,进而得出 (11) 中 W \mathbf{W} W 内快时间/慢时间 PN 样本的协方差矩阵。作为一个例子,图 2 绘制了针对 PLL 和 FRO 在不同目标时延 τ \tau τ 下 ξ ( t , τ ) \xi(t, \tau) ξ(t,τ) 的协方差。该图阐明了 OFDM 雷达感知中 PN 统计特性的时延依赖性(与 OFDM 通信相反,例如 19, 46, 47),并提供了关于基于 PLL 的控制对 PN 相关行为影响的见解。
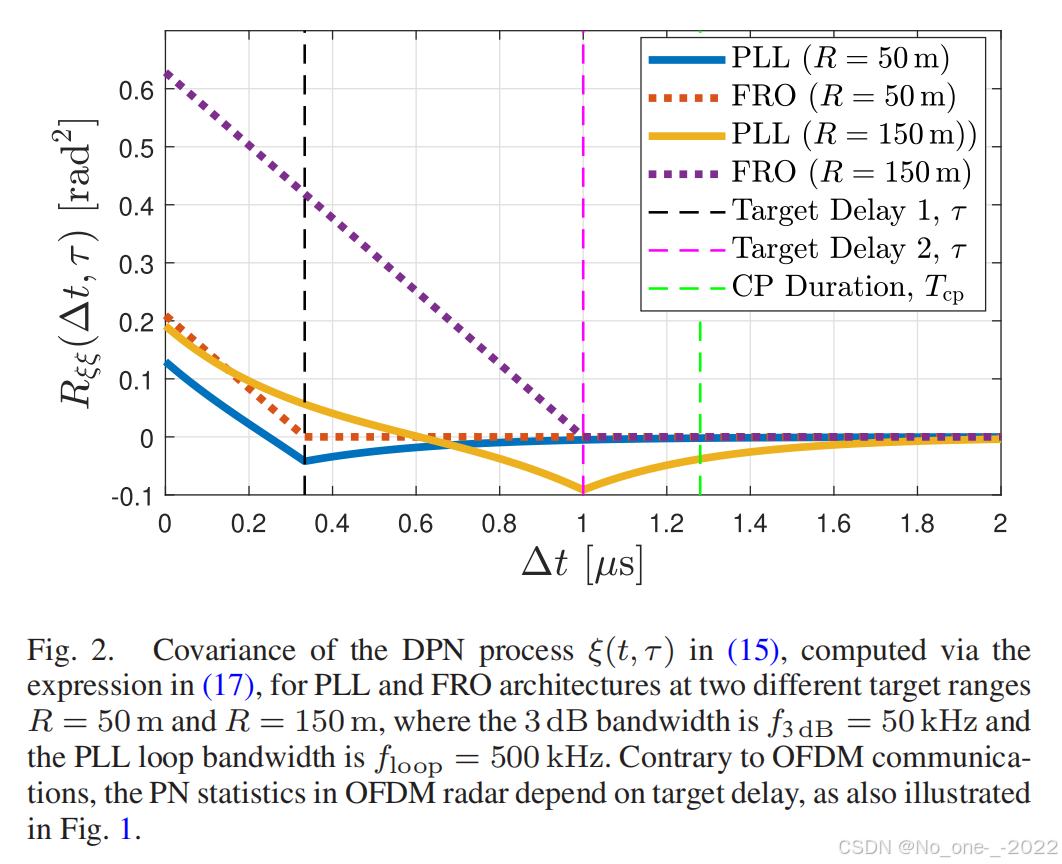
图 2. DPN 过程 ξ ( t , τ ) \xi(t, \tau) ξ(t,τ)(定义见 (15))的协方差,该协方差是通过 (17) 中的表达式针对 PLL 和 FRO 架构在两个不同的目标距离 R = 50 R = 50 R=50 m 和 R = 150 R = 150 R=150 m 下计算得出的,其中 3 dB 带宽为 f 3 d B = 50 f_{3\,\mathrm{dB}} = 50 f3dB=50 kHz,PLL 环路带宽为 f l o o p = 500 f_{\mathrm{loop}} = 500 floop=500 kHz。与 OFDM 通信相反,OFDM 雷达中的 PN 统计特性取决于目标时延,这一点在图 1 中也进行了说明。
C. 与时延相关的 PN 协方差矩阵
令 w ≜ v e c ( W ) ∈ C N M × 1 \mathbf{w} \triangleq \mathrm{vec}(\mathbf{W}) \in \mathbb{C}^{NM \times 1} w≜vec(W)∈CNM×1 和 ξ ∈ R N M × 1 \boldsymbol{\xi} \in \mathbb{R}^{NM \times 1} ξ∈RNM×1 表示整个 OFDM 帧上 (15) 中 PN 过程的采样版本,即来自 (7) 的 w = e − j ξ \mathbf{w} = e^{-j\boldsymbol{\xi}} w=e−jξ。那么, ξ \boldsymbol{\xi} ξ 的统计特性可以描述为 6 ^6 6
6 ^6 6 按照引理 1 中的论证,通过计算与不同时延下不同目标相关的 PN 向量的互相关,可以将 PN 统计特性的推导直接扩展到多目标情况。
ξ ∼ N ( 0 , R ( τ ) ) , (20) \boldsymbol{\xi} \sim \mathcal{N}(\mathbf{0}, \mathbf{R}(\tau)), \tag{20} ξ∼N(0,R(τ)),(20)
其中 R ( τ ) ∈ R N M × N M \mathbf{R}(\tau) \in \mathbb{R}^{NM \times NM} R(τ)∈RNM×NM 是 ξ \boldsymbol{\xi} ξ 的与时延相关的正定协方差矩阵。利用 (16) 和 (17), R ( τ ) \mathbf{R}(\tau) R(τ) 的第 ( i 1 , i 2 ) (i_1, i_2) (i1,i2) 个元素可以写为
R ( τ ) i 1 , i 2 = R ξ ξ ( Δ t i 1 i 2 , τ ) , (21) \\mathbf{R}(\\tau){i_1, i_2} = R{\xi\xi}(\Delta t_{i_1 i_2}, \tau), \tag{21} R(τ)i1,i2=Rξξ(Δti1i2,τ),(21)
其中
Δ t i 1 i 2 ≜ ( i 1 − i 2 ) T s + ( m 1 − m 2 ) T c p (22) \Delta t_{i_1 i_2} \triangleq (i_1 - i_2)T_s + (m_1 - m_2)T_{\mathrm{cp}} \tag{22} Δti1i2≜(i1−i2)Ts+(m1−m2)Tcp(22)
对于 ( i 1 , i 2 ) = ( n 1 + m 1 N , n 2 + m 2 N ) (i_1, i_2) = (n_1 + m_1 N, n_2 + m_2 N) (i1,i2)=(n1+m1N,n2+m2N),其中 0 ≤ n 1 , n 2 ≤ N − 1 0 \leq n_1, n_2 \leq N - 1 0≤n1,n2≤N−1 和 0 ≤ m 1 , m 2 ≤ M − 1 0 \leq m_1, m_2 \leq M - 1 0≤m1,m2≤M−1 分别表示快时间和慢时间采样索引,且 T s = T / N T_s = T/N Ts=T/N 为采样间隔。我们从 (22) 注意到,由于 CP 的移除, Δ t i 1 i 2 \Delta t_{i_1 i_2} Δti1i2 不仅取决于 i 1 − i 2 i_1 - i_2 i1−i2,还取决于属于不同符号的 PN 样本之间的符号(慢时间)索引差。
- 变量定义回顾
- i i i (线性索引):接收机得到的观测向量 Y \mathbf{Y} Y 或 PN 向量 ξ \boldsymbol{\xi} ξ 中的第 i i i 个数据点。这个向量已经去除了 CP。
- T s T_s Ts:采样间隔 ( T / N T/N T/N)。 T c p T_{\mathrm{cp}} Tcp:循环前缀的持续时间。
- 映射关系:任意线性索引 i i i 可以唯一映射到第 m m m 个符号的第 n n n 个采样点: i = m ⋅ N + n , 其中 0 ≤ n < N i = m \cdot N + n, \quad \text{其中 } 0 \le n < N i=m⋅N+n,其中 0≤n<N
物理时间的计算在物理世界中,振荡器是连续运行的。第 m m m 个符号的第 n n n 个有效数据采样点的绝对物理时间 t p h y s i c a l t_{physical} tphysical 是: t m , n = m ⋅ ( N T s + T c p ) ⏟ 前 m 个完整符号的时间 + T c p ⏟ 当前符号跳过的 CP + n ⋅ T s ⏟ 当前符号内的偏移 t_{m,n} = \underbrace{m \cdot (N T_s + T_{\mathrm{cp}})}{\text{前 } m \text{ 个完整符号的时间}} + \underbrace{T{\mathrm{cp}}}{\text{当前符号跳过的 CP}} + \underbrace{n \cdot T_s}{\text{当前符号内的偏移}} tm,n=前 m 个完整符号的时间 m⋅(NTs+Tcp)+当前符号跳过的 CP Tcp+当前符号内的偏移 n⋅Ts注意:每个完整 OFDM 符号的物理长度是 T s y m = N T s + T c p T_{\mathrm{sym}} = N T_s + T_{\mathrm{cp}} Tsym=NTs+Tcp。我们在取第 n n n 个采样点时,已经在当前符号内跳过了 T c p T_{\mathrm{cp}} Tcp 的时长。
计算时间差 Δ t \Delta t Δt现在我们要计算两个索引 i 1 ( m 1 , n 1 ) i_1 (m_1, n_1) i1(m1,n1) 和 i 2 ( m 2 , n 2 ) i_2 (m_2, n_2) i2(m2,n2) 之间的物理时间差: Δ t = t m 1 , n 1 − t m 2 , n 2 \Delta t = t_{m_1, n_1} - t_{m_2, n_2} Δt=tm1,n1−tm2,n2代入上面的物理时间公式: Δ t = m 1 ( N T s + T c p ) + T c p + n 1 T s − m 2 ( N T s + T c p ) + T c p + n 2 T s = ( m 1 − m 2 ) ( N T s + T c p ) + ( n 1 − n 2 ) T s + ( T c p − T c p ) ⏟ 0 \begin{aligned} \Delta t &= \left m_1 (N T_s + T_{\\mathrm{cp}}) + T_{\\mathrm{cp}} + n_1 T_s \\right - \left m_2 (N T_s + T_{\\mathrm{cp}}) + T_{\\mathrm{cp}} + n_2 T_s \\right \\ &= (m_1 - m_2)(N T_s + T_{\mathrm{cp}}) + (n_1 - n_2) T_s + \underbrace{(T_{\mathrm{cp}} - T_{\mathrm{cp}})}{0} \end{aligned} Δt=m1(NTs+Tcp)+Tcp+n1Ts−m2(NTs+Tcp)+Tcp+n2Ts=(m1−m2)(NTs+Tcp)+(n1−n2)Ts+0 (Tcp−Tcp)将 N T s N T_s NTs 和 T c p T{\mathrm{cp}} Tcp 的项分开整理: Δ t = ( m 1 − m 2 ) N T s + ( n 1 − n 2 ) T s + ( m 1 − m 2 ) T c p = ( m 1 N + n 1 ) − ( m 2 N + n 2 ) ⏟ 这正是线性索引 i 1 − i 2 T s + ( m 1 − m 2 ) T c p \begin{aligned} \Delta t &= (m_1 - m_2) N T_s + (n_1 - n_2) T_s + (m_1 - m_2) T_{\mathrm{cp}} \\ &= \underbrace{ (m_1 N + n_1) - (m_2 N + n_2) }{\text{这正是线性索引 } i_1 - i_2} T_s + (m_1 - m_2) T{\mathrm{cp}} \end{aligned} Δt=(m1−m2)NTs+(n1−n2)Ts+(m1−m2)Tcp=这正是线性索引 i1−i2 (m1N+n1)−(m2N+n2)Ts+(m1−m2)Tcp于是就得到了公式 (22): Δ t i 1 i 2 = ( i 1 − i 2 ) T s + ( m 1 − m 2 ) T c p \Delta t_{i_1 i_2} = (i_1 - i_2)T_s + (m_1 - m_2)T_{\mathrm{cp}} Δti1i2=(i1−i2)Ts+(m1−m2)Tcp
直观的物理图景你可以把这个公式看作两部分的叠加:
- ( i 1 − i 2 ) T s (i_1 - i_2)T_s (i1−i2)Ts:这是假设没有 CP 时,两个采样点之间的时间差。因为 i 1 i_1 i1 和 i 2 i_2 i2 是数据向量中的紧密排列(没有空隙),所以它们直接对应了 T s T_s Ts 的倍数。
- ( m 1 − m 2 ) T c p (m_1 - m_2)T_{\mathrm{cp}} (m1−m2)Tcp:这是 "丢失的时间"补偿项 。
- 如果我们比较的是同一个符号内的点( m 1 = m 2 m_1 = m_2 m1=m2),这一项为 0。因为它们之间没有跨越 CP。
- 如果我们比较的是相邻符号的点( m 1 = m 2 + 1 m_1 = m_2 + 1 m1=m2+1),那么除了数据采样点的间隔外,物理振荡器还额外多跑了一段 T c p T_{\mathrm{cp}} Tcp 的时间(即两个符号中间的那个 CP)。虽然数据里把这段 CP 扔了,但相位噪声在这段时间里依然在积累,所以计算相关性时必须把这段时间加回来。
从 (21) 和 (22) 可以直接看出, R ( τ ) \mathbf{R}(\tau) R(τ) 是一个对称的 Toeplitz-块 Toeplitz 矩阵(a symmetric Toeplitz-block Toeplitz matrix) 64,由 M × M M \times M M×M 个大小为 N × N N \times N N×N 的块组成:
R ( τ ) = R 0 ( τ ) R 1 ( τ ) ⋯ R M − 1 ( τ ) R 1 T ( τ ) ⋱ ⋱ ⋮ ⋮ ⋱ ⋱ R 1 ( τ ) R M − 1 T ( τ ) ⋯ R 1 T ( τ ) R 0 ( τ ) , (23) \mathbf{R}(\tau) = \begin{bmatrix} \mathbf{R}_0(\tau) & \mathbf{R}1(\tau) & \cdots & \mathbf{R}{M-1}(\tau) \\ \mathbf{R}_1^T(\tau) & \ddots & \ddots & \vdots \\ \vdots & \ddots & \ddots & \mathbf{R}1(\tau) \\ \mathbf{R}{M-1}^T(\tau) & \cdots & \mathbf{R}_1^T(\tau) & \mathbf{R}_0(\tau) \end{bmatrix}, \tag{23} R(τ)= R0(τ)R1T(τ)⋮RM−1T(τ)R1(τ)⋱⋱⋯⋯⋱⋱R1T(τ)RM−1(τ)⋮R1(τ)R0(τ) ,(23)
其中第 m m m 个 Toeplitz 块 R m ( τ ) ∈ R N × N \mathbf{R}_m(\tau) \in \mathbb{R}^{N \times N} Rm(τ)∈RN×N 由下式给出
R m ( τ ) n 1 , n 2 = R ξ ξ ( Δ t n 1 n 2 ( m ) , τ ) (24) \\mathbf{R}_m(\\tau){n_1, n_2} = R{\xi\xi}(\Delta t_{n_1 n_2}^{(m)}, \tau) \tag{24} Rm(τ)n1,n2=Rξξ(Δtn1n2(m),τ)(24)
其中 Δ t n 1 n 2 ( m ) ≜ ( n 1 − n 2 ) T s − m T s y m \Delta t_{n_1 n_2}^{(m)} \triangleq (n_1 - n_2)T_s - m T_{\mathrm{sym}} Δtn1n2(m)≜(n1−n2)Ts−mTsym。虽然 PLL 表现出 (23) 中的通用 Toeplitz-块 Toeplitz 结构,但如下引理指出,FRO 会导致更特殊的协方差结构。
引理 2 :对于 τ ≤ T c p \tau \leq T_{\mathrm{cp}} τ≤Tcp 的 FRO,(23) 中的 PN 协方差矩阵 R ( τ ) \mathbf{R}(\tau) R(τ) 是块对角的,即 R ( τ ) = b l k d i a g ( R 0 ( τ ) , ... , R 0 ( τ ) ) . (25) \mathbf{R}(\tau) = \mathrm{blkdiag}(\mathbf{R}_0(\tau), \ldots, \mathbf{R}_0(\tau)). \tag{25} R(τ)=blkdiag(R0(τ),...,R0(τ)).(25)
证明:请参阅补充材料中的 S-II 节。
引理 2 的一个直观解释如下(An intuitive interpretation of Lemma 2 can be provided as follows)。由于不同符号中的 PN 样本在时间上至少相隔 T c p T_{\mathrm{cp}} Tcp,因此当 τ ≤ T c p \tau \leq T_{\mathrm{cp}} τ≤Tcp 时,(15) 中的 PN 过程在不同符号之间变得不相关。
换句话说,对应于 ξ ( t , τ ) \xi(t, \tau) ξ(t,τ) 和 ξ ( t + T c p , τ ) \xi(t + T_{\mathrm{cp}}, \tau) ξ(t+Tcp,τ) 的 PN 累积 48 时间间隔是不重叠的,这导致在没有控制环路的情况下 PN 不相关。图 2 也证实了这一结果,其中 FRO 的相关性在 Δ t ≥ τ \Delta t \geq \tau Δt≥τ 时为零,而 PLL 的相关性在 Δ t ≥ T c p \Delta t \geq T_{\mathrm{cp}} Δt≥Tcp 时可能具有非零值。
备注 1:本节提供的 PN 分析也可以应用于经典的单站雷达系统,例如 FMCW 和脉冲雷达。尽管 PN 协方差矩阵的结构可能会根据特定的波形属性而变化,但基本结果(即 PN 统计特性与时延相关)无论对于 OFDM、FMCW 还是脉冲雷达都是相同的。这是由单站雷达设置中 PN 过程的差分(自相关)性质决定的。因此,类似于本文提出的 PN 缓解和利用算法(即第四节中的算法 1 和第五节中的算法 2)也可以应用于 FMCW 和脉冲雷达系统。
IV. PROPOSED ALGORITHM FOR DELAY-DOPPLER ESTIMATION UNDER PHASE NOISE
A. 混合 ML/MAP 估计器
Y = α W ⊙ F N H ( X ⊙ b ( τ ) c H ( ν ) ) + Z (11) \mathbf{Y} = \alpha \mathbf{W} \odot \mathbf{F}_N^H \left( \mathbf{X} \odot \mathbf{b}(\tau) \mathbf{c}^H(\nu) \right) + \mathbf{Z} \tag{11} Y=αW⊙FNH(X⊙b(τ)cH(ν))+Z(11)
为了推导时延、多普勒和 PN 的混合 ML/MAP 估计器,我们首先将 (11) 中的观测值重写为
y = α Ξ q ( τ , ν ) + z , (26) \mathbf{y} = \alpha \mathbf{\Xi} \mathbf{q}(\tau, \nu) + \mathbf{z}, \tag{26} y=αΞq(τ,ν)+z,(26)
其中 y ≜ v e c ( Y ) ∈ C N M × 1 \mathbf{y} \triangleq \mathrm{vec}(\mathbf{Y}) \in \mathbb{C}^{NM \times 1} y≜vec(Y)∈CNM×1, z ≜ v e c ( Z ) ∈ C N M × 1 \mathbf{z} \triangleq \mathrm{vec}(\mathbf{Z}) \in \mathbb{C}^{NM \times 1} z≜vec(Z)∈CNM×1,
Ξ ≜ d i a g ( e − j ξ ) ∈ C N M × N M , (27) \mathbf{\Xi} \triangleq \mathrm{diag} (e^{-j\boldsymbol{\xi}}) \in \mathbb{C}^{NM \times NM}, \tag{27} Ξ≜diag(e−jξ)∈CNM×NM,(27)
q ( τ , ν ) ≜ v e c ( F N H X ⊙ b ( τ ) c H ( ν ) ) ∈ C N M × 1 . (28) \mathbf{q}(\tau, \nu) \triangleq \mathrm{vec} \left( \mathbf{F}_N^H \\mathbf{X} \\odot \\mathbf{b}(\\tau)\\mathbf{c}\^H(\\nu) \right) \in \mathbb{C}^{NM \times 1}. \tag{28} q(τ,ν)≜vec(FNHX⊙b(τ)cH(ν))∈CNM×1.(28)
我们此处的目的是从 (26) 中估计未知参数向量 η = τ , ν , α , ξ T T \boldsymbol{\eta} = \\tau, \\nu, \\alpha, \\boldsymbol{\\xi}\^T^T η=τ,ν,α,ξTT,该向量由随机参数 ( ξ \boldsymbol{\xi} ξ) 和确定性参数 ( τ , ν , α \tau, \nu, \alpha τ,ν,α) 组成 7 ^7 7。那么, η \boldsymbol{\eta} η 的混合 ML/MAP 估计器可以写为 53
7 ^7 7 由于 PN 的时变特性以及目标在时延-多普勒平面内可能的移动,对 η \boldsymbol{\eta} η 的估计需要在每个新的 OFDM 帧中进行。尽管 PN ξ \boldsymbol{\xi} ξ 具有 (20) 中指定的时不变统计特性,但它在每一帧中都有不同的(时变)实现,因此随着 (26) 形式的新观测值到来,需要通过重新执行第四节中提出的方法来进行重新估计。
( τ ^ , ν ^ , α ^ , ξ ^ ) = arg max τ , ν , α , ξ f y , ξ ( y , ξ ; τ , ν , α ) , (29) (\widehat{\tau}, \widehat{\nu}, \widehat{\alpha}, \widehat{\boldsymbol{\xi}}) = \arg \max_{\tau, \nu, \alpha, \boldsymbol{\xi}} f_{\mathbf{y}, \boldsymbol{\xi}}(\mathbf{y}, \boldsymbol{\xi}; \tau, \nu, \alpha), \tag{29} (τ ,ν ,α ,ξ )=argτ,ν,α,ξmaxfy,ξ(y,ξ;τ,ν,α),(29)
其中 f y , ξ ( y , ξ ; τ , ν , α ) f_{\mathbf{y}, \boldsymbol{\xi}}(\mathbf{y}, \boldsymbol{\xi}; \tau, \nu, \alpha) fy,ξ(y,ξ;τ,ν,α) 是 y \mathbf{y} y 和 ξ \boldsymbol{\xi} ξ 的联合概率密度函数 (PDF),它是确定性参数 τ , ν \tau, \nu τ,ν 和 α \alpha α 的函数
f y , ξ ( y , ξ ; τ , ν , α ) = f y ∣ ξ ( y ∣ ξ ; τ , ν , α ) f ξ ( ξ ; τ ) , (30) f_{\mathbf{y}, \boldsymbol{\xi}}(\mathbf{y}, \boldsymbol{\xi}; \tau, \nu, \alpha) = f_{\mathbf{y}|\boldsymbol{\xi}}(\mathbf{y}|\boldsymbol{\xi}; \tau, \nu, \alpha) f_{\boldsymbol{\xi}}(\boldsymbol{\xi}; \tau), \tag{30} fy,ξ(y,ξ;τ,ν,α)=fy∣ξ(y∣ξ;τ,ν,α)fξ(ξ;τ),(30)
公式 (30) 的成立基于概率论中的链式法则 (Chain Rule) 以及物理模型中的条件独立性。
1. 联合概率的通用定义
根据贝叶斯定理,对于任意两个随机向量 y \mathbf{y} y 和 ξ \boldsymbol{\xi} ξ,其联合概率密度函数 (Joint PDF) 总是可以分解为"条件概率"乘以"边缘概率": f A , B ( a , b ) = f A ∣ B ( a ∣ b ) ⋅ f B ( b ) f_{\mathbf{A}, \mathbf{B}}(\mathbf{a}, \mathbf{b}) = f_{\mathbf{A} | \mathbf{B}}(\mathbf{a} | \mathbf{b}) \cdot f_{\mathbf{B}}(\mathbf{b}) fA,B(a,b)=fA∣B(a∣b)⋅fB(b)
f y , ξ ( y , ξ ; Θ ) = f y ∣ ξ ( y ∣ ξ ; Θ ) ⋅ f ξ ( ξ ; Θ ) f_{\mathbf{y}, \boldsymbol{\xi}}(\mathbf{y}, \boldsymbol{\xi}; \Theta) = f_{\mathbf{y}|\boldsymbol{\xi}}(\mathbf{y}|\boldsymbol{\xi}; \Theta) \cdot f_{\boldsymbol{\xi}}(\boldsymbol{\xi}; \Theta) fy,ξ(y,ξ;Θ)=fy∣ξ(y∣ξ;Θ)⋅fξ(ξ;Θ)其中 Θ = { τ , ν , α } \Theta = \{\tau, \nu, \alpha\} Θ={τ,ν,α} 为全套未知参数。代入后得到未化简形式:
f y , ξ ( y , ξ ; τ , ν , α ) = f y ∣ ξ ( y ∣ ξ ; τ , ν , α ) ⋅ f ξ ( ξ ; τ , ν , α ) f_{\mathbf{y}, \boldsymbol{\xi}}(\mathbf{y}, \boldsymbol{\xi}; \tau, \nu, \alpha) = f_{\mathbf{y}|\boldsymbol{\xi}}(\mathbf{y}|\boldsymbol{\xi}; \tau, \nu, \alpha) \cdot f_{\boldsymbol{\xi}}(\boldsymbol{\xi}; \tau, \nu, \alpha) fy,ξ(y,ξ;τ,ν,α)=fy∣ξ(y∣ξ;τ,ν,α)⋅fξ(ξ;τ,ν,α)2. 基于物理模型的独立性化简
考察右侧第二项(相位噪声的先验分布)对参数的依赖性:
- 与 α , ν \alpha, \nu α,ν 独立 :振荡器的物理噪声特性与目标的反射强度 ( α \alpha α) 和运动速度 ( ν \nu ν) 无关。
- 依赖于 τ \tau τ :根据差分相位噪声模型,噪声的协方差矩阵 R ( τ ) \mathbf{R}(\tau) R(τ) 直接由目标时延 τ \tau τ 决定(距离相关效应)。
因此, ξ \boldsymbol{\xi} ξ 的分布仅由 τ \tau τ 参数化,先验概率项可化简为:
f ξ ( ξ ; τ , ν , α ) ⟶ f ξ ( ξ ; τ ) f_{\boldsymbol{\xi}}(\boldsymbol{\xi}; \tau, \nu, \alpha) \longrightarrow f_{\boldsymbol{\xi}}(\boldsymbol{\xi}; \tau) fξ(ξ;τ,ν,α)⟶fξ(ξ;τ)3. 最终结果
将步骤 2 的化简结果代回步骤 1,即得公式 (30):
f y , ξ ( y , ξ ; τ , ν , α ) = f y ∣ ξ ( y ∣ ξ ; τ , ν , α ) f ξ ( ξ ; τ ) (30) f_{\mathbf{y}, \boldsymbol{\xi}}(\mathbf{y}, \boldsymbol{\xi}; \tau, \nu, \alpha) = f_{\mathbf{y}|\boldsymbol{\xi}}(\mathbf{y}|\boldsymbol{\xi}; \tau, \nu, \alpha) f_{\boldsymbol{\xi}}(\boldsymbol{\xi}; \tau) \tag{30} fy,ξ(y,ξ;τ,ν,α)=fy∣ξ(y∣ξ;τ,ν,α)fξ(ξ;τ)(30)
f y ∣ ξ ( y ∣ ξ ; τ , ν , α ) f_{\mathbf{y}|\boldsymbol{\xi}}(\mathbf{y}|\boldsymbol{\xi}; \tau, \nu, \alpha) fy∣ξ(y∣ξ;τ,ν,α) 是给定 ξ \boldsymbol{\xi} ξ 时 y \mathbf{y} y 的条件 PDF,而 f ξ ( ξ ; τ ) f_{\boldsymbol{\xi}}(\boldsymbol{\xi}; \tau) fξ(ξ;τ) 是 ξ \boldsymbol{\xi} ξ 的先验 PDF。由 (20) 和 (26) 可得
f y ∣ ξ ( y ∣ ξ ; τ , ν , α ) = 1 ( 2 π σ 2 ) N M exp { − ∥ y − α Ξ q ( τ , ν ) ∥ 2 2 σ 2 } , (31) f_{\mathbf{y}|\boldsymbol{\xi}}(\mathbf{y}|\boldsymbol{\xi}; \tau, \nu, \alpha) = \frac{1}{(2\pi\sigma^2)^{NM}} \exp \left\{ - \frac{\|\mathbf{y} - \alpha \mathbf{\Xi} \mathbf{q}(\tau, \nu)\|^2}{2\sigma^2} \right\}, \tag{31} fy∣ξ(y∣ξ;τ,ν,α)=(2πσ2)NM1exp{−2σ2∥y−αΞq(τ,ν)∥2},(31)
f ξ ( ξ ; τ ) = 1 ( 2 π ) N M det ( R ( τ ) ) exp { − ξ T R ( τ ) − 1 ξ 2 } . (32) f_{\boldsymbol{\xi}}(\boldsymbol{\xi}; \tau) = \frac{1}{\sqrt{(2\pi)^{NM} \det(\mathbf{R}(\tau))}} \exp \left\{ - \frac{\boldsymbol{\xi}^T \mathbf{R}(\tau)^{-1} \boldsymbol{\xi}}{2} \right\}. \tag{32} fξ(ξ;τ)=(2π)NMdet(R(τ)) 1exp{−2ξTR(τ)−1ξ}.(32)
将 (30)--(32) 代入 (29) 可得
( τ ^ , ν ^ , α ^ , ξ ^ ) = arg min τ , ν , α , ξ { ∥ y − α Ξ q ( τ , ν ) ∥ 2 2 σ 2 + ξ T R ( τ ) − 1 ξ + log det R ( τ ) 2 } . (33) \begin{aligned} (\widehat{\tau}, \widehat{\nu}, \widehat{\alpha}, \widehat{\boldsymbol{\xi}}) &= \arg \min_{\tau, \nu, \alpha, \boldsymbol{\xi}} \left\{ \frac{\|\mathbf{y} - \alpha \mathbf{\Xi} \mathbf{q}(\tau, \nu)\|^2}{2\sigma^2} \right. \\ &\left. + \frac{\boldsymbol{\xi}^T \mathbf{R}(\tau)^{-1} \boldsymbol{\xi} + \log \det \mathbf{R}(\tau)}{2} \right\}. \end{aligned} \tag{33} (τ ,ν ,α ,ξ )=argτ,ν,α,ξmin{2σ2∥y−αΞq(τ,ν)∥2+2ξTR(τ)−1ξ+logdetR(τ)}.(33)
对于给定的 τ , ν \tau, \nu τ,ν 和 ξ \boldsymbol{\xi} ξ,(33) 中 α \alpha α 的最优估计由下式给出
α ^ = q H ( τ , ν ) Ξ H y q H ( τ , ν ) Ξ H Ξ q ( τ , ν ) = q H ( τ , ν ) Ξ H y ∥ X ∥ F 2 , (34) \widehat{\alpha} = \frac{\mathbf{q}^H(\tau, \nu)\mathbf{\Xi}^H \mathbf{y}}{\mathbf{q}^H(\tau, \nu)\mathbf{\Xi}^H \mathbf{\Xi} \mathbf{q}(\tau, \nu)} = \frac{\mathbf{q}^H(\tau, \nu)\mathbf{\Xi}^H \mathbf{y}}{\|\mathbf{X}\|_F^2}, \tag{34} α =qH(τ,ν)ΞHΞq(τ,ν)qH(τ,ν)ΞHy=∥X∥F2qH(τ,ν)ΞHy,(34)
其中最后一个等式源自 (9), (10) 和 (28):
∥ q ( τ , ν ) ∥ 2 = ∥ F N H ( X ⊙ b ( τ ) c H ( ν ) ) ∥ F 2 = ∥ X ⊙ b ( τ ) c H ( ν ) ∥ F 2 = ∥ X ∥ F 2 . (35) \begin{aligned} \|\mathbf{q}(\tau, \nu)\|^2 &= \|\mathbf{F}_N^H (\mathbf{X} \odot \mathbf{b}(\tau)\mathbf{c}^H(\nu))\|_F^2 \\ &= \|\mathbf{X} \odot \mathbf{b}(\tau)\mathbf{c}^H(\nu)\|_F^2 = \|\mathbf{X}\|_F^2. \end{aligned} \tag{35} ∥q(τ,ν)∥2=∥FNH(X⊙b(τ)cH(ν))∥F2=∥X⊙b(τ)cH(ν)∥F2=∥X∥F2.(35)
将 (34) 代入 (33),混合 ML/MAP 问题变为
( τ ^ , ν ^ , ξ ^ ) = arg min τ , ν , ξ y H Π Ξ q ( τ , ν ) ⊥ y σ 2 + ξ T R ( τ ) − 1 ξ + log det R ( τ ) , (36) \begin{aligned} (\widehat{\tau}, \widehat{\nu}, \widehat{\boldsymbol{\xi}}) &= \arg \min_{\tau, \nu, \boldsymbol{\xi}} \frac{\mathbf{y}^H \mathbf{\Pi}_{\mathbf{\Xi}\mathbf{q}(\tau, \nu)}^{\perp} \mathbf{y}}{\sigma^2} + \boldsymbol{\xi}^T \mathbf{R}(\tau)^{-1} \boldsymbol{\xi} \\ &+ \log \det \mathbf{R}(\tau), \end{aligned} \tag{36} (τ ,ν ,ξ )=argτ,ν,ξminσ2yHΠΞq(τ,ν)⊥y+ξTR(τ)−1ξ+logdetR(τ),(36)
其中
Π Ξ q ( τ , ν ) ⊥ = I − Ξ q ( τ , ν ) q H ( τ , ν ) Ξ H ∥ q ( τ , ν ) ∥ 2 = Ξ Ξ H − Ξ q ( τ , ν ) q H ( τ , ν ) Ξ H ∥ q ( τ , ν ) ∥ 2 = Ξ ( I − q ( τ , ν ) q H ( τ , ν ) ∥ q ( τ , ν ) ∥ 2 ) Ξ H = Ξ Π q ( τ , ν ) ⊥ Ξ H , (37) \begin{aligned} \mathbf{\Pi}{\mathbf{\Xi}\mathbf{q}(\tau, \nu)}^{\perp} &= \mathbf{I} - \frac{\mathbf{\Xi}\mathbf{q}(\tau, \nu)\mathbf{q}^H(\tau, \nu)\mathbf{\Xi}^H}{\|\mathbf{q}(\tau, \nu)\|^2} \\ &= \mathbf{\Xi}\mathbf{\Xi}^H - \frac{\mathbf{\Xi}\mathbf{q}(\tau, \nu)\mathbf{q}^H(\tau, \nu)\mathbf{\Xi}^H}{\|\mathbf{q}(\tau, \nu)\|^2} \\ &= \mathbf{\Xi} \left( \mathbf{I} - \frac{\mathbf{q}(\tau, \nu)\mathbf{q}^H(\tau, \nu)}{\|\mathbf{q}(\tau, \nu)\|^2} \right) \mathbf{\Xi}^H \\ &= \mathbf{\Xi} \mathbf{\Pi}{\mathbf{q}(\tau, \nu)}^{\perp} \mathbf{\Xi}^H, \end{aligned} \tag{37} ΠΞq(τ,ν)⊥=I−∥q(τ,ν)∥2Ξq(τ,ν)qH(τ,ν)ΞH=ΞΞH−∥q(τ,ν)∥2Ξq(τ,ν)qH(τ,ν)ΞH=Ξ(I−∥q(τ,ν)∥2q(τ,ν)qH(τ,ν))ΞH=ΞΠq(τ,ν)⊥ΞH,(37)
其中 Ξ Ξ H = I \mathbf{\Xi}\mathbf{\Xi}^H = \mathbf{I} ΞΞH=I 源自 (27)。将 (37) 代入 (36),我们得到
( τ ^ , ν ^ , ξ ^ ) = arg min τ , ν , ξ L ( τ , ν , ξ ) , (38) (\widehat{\tau}, \widehat{\nu}, \widehat{\boldsymbol{\xi}}) = \arg \min_{\tau, \nu, \boldsymbol{\xi}} \mathcal{L}(\tau, \nu, \boldsymbol{\xi}), \tag{38} (τ ,ν ,ξ )=argτ,ν,ξminL(τ,ν,ξ),(38)
其中
L ( τ , ν , ξ ) = y H Ξ Π q ( τ , ν ) ⊥ Ξ H y σ 2 + ξ T R ( τ ) − 1 ξ + log det R ( τ ) . (39) \begin{aligned} \mathcal{L}(\tau, \nu, \boldsymbol{\xi}) &= \frac{\mathbf{y}^H \mathbf{\Xi} \mathbf{\Pi}_{\mathbf{q}(\tau, \nu)}^{\perp} \mathbf{\Xi}^H \mathbf{y}}{\sigma^2} + \boldsymbol{\xi}^T \mathbf{R}(\tau)^{-1} \boldsymbol{\xi} \\ &+ \log \det \mathbf{R}(\tau). \end{aligned} \tag{39} L(τ,ν,ξ)=σ2yHΞΠq(τ,ν)⊥ΞHy+ξTR(τ)−1ξ+logdetR(τ).(39)