概念:有向无环图 即 没有回路的有向图,常用来描述一个系统或工程的行进过程
如何描述工程或子工程活动:
- AOV网(Activity On Vertex network)---解决拓扑排序问题---对应系统分析中前驱图解决PV操作的工具
用一个有向图表示一个工程的各自工程及其相互制约关系,其中顶点表示活动,边表示互动间的优先制约关系,称这种有向图为顶点表示活动的网,简称AOV网- 特点
- 若从i到j有一条路径, 则i是j的前驱,j是i的后继;
- 若<i, j>是网中的有向边,则i是j的直接前驱,j是i的直接后继;
- AOV网中不允许有回路,因为如果回路存在,则表明某项活动以自己为先决条件,这是不允许的
- 拓扑排序
- 定义:在AOV网没有回路的前提下,我们将全部活动排列成一个线性序列,使得若AOV网中有边<i, j>存在,则在这个序列中,i 一定排在 j 的前面,具有这种性质的线性序列称为拓扑有序序列,相应的拓扑有序排序算法称为拓扑排序
- 如何把AOV网转换成线性有序序列?
- 找到没有前驱的顶点,然后删掉这个顶点及以全部该顶点为边尾的边;
- 然后输出这个删掉的顶点为一个拓扑序列活动,按从小到大原则依此删除顶点和边并顺序输出到序列中;
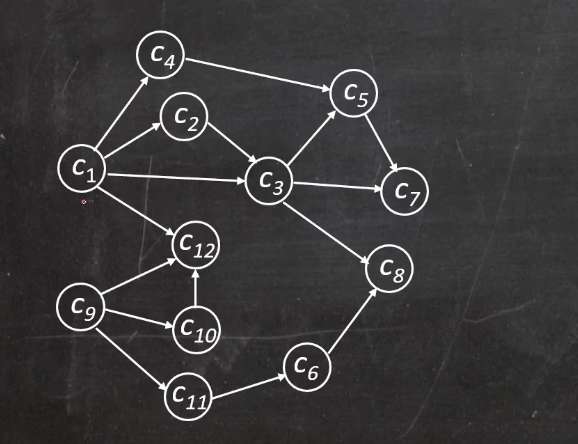
- 初始AOV网到线性有序序列示意图:(可以自定义原则,比如从小到大,也可以从大到小,拓扑线性有序序列不唯一)
- 初始AOV网
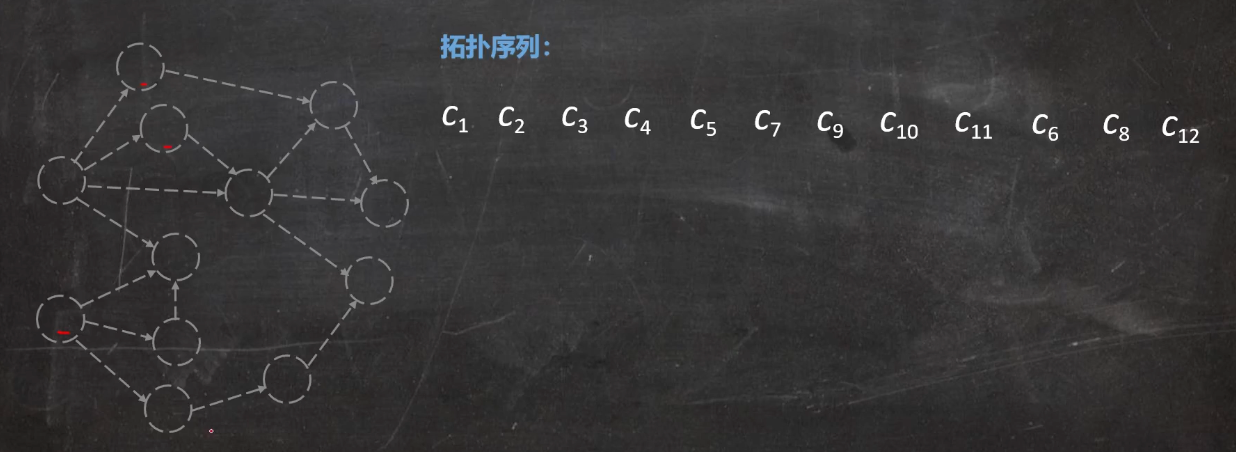
- 最终输出的线性有序序列结果:
- 验证:到AOV网中前驱和后继关系
- 初始AOV网
- 如何把AOV网转换成线性有序序列?
- 如何检测拓扑图中是否存在回路?
- 对有向图构造其顶点的拓扑有序序列,若网中所有顶点都在它的拓扑有序序列中,则AOV网中必定不存在环;
- 定义:在AOV网没有回路的前提下,我们将全部活动排列成一个线性序列,使得若AOV网中有边<i, j>存在,则在这个序列中,i 一定排在 j 的前面,具有这种性质的线性序列称为拓扑有序序列,相应的拓扑有序排序算法称为拓扑排序
- 特点
- AOE网(Activity On Edge nework)---解决关键路径问题---对应高级项目管理中的网络图,用来评估项目排期最长路径最短排期,即关键路径
用一个有向图表示一个工程的各子工程及相互制约关系,其中边表示活动,以顶点表示活动的开始或者结束事件,称这种有向图为边表示活动的网,简称AOV网。- 使用拓扑排序方式
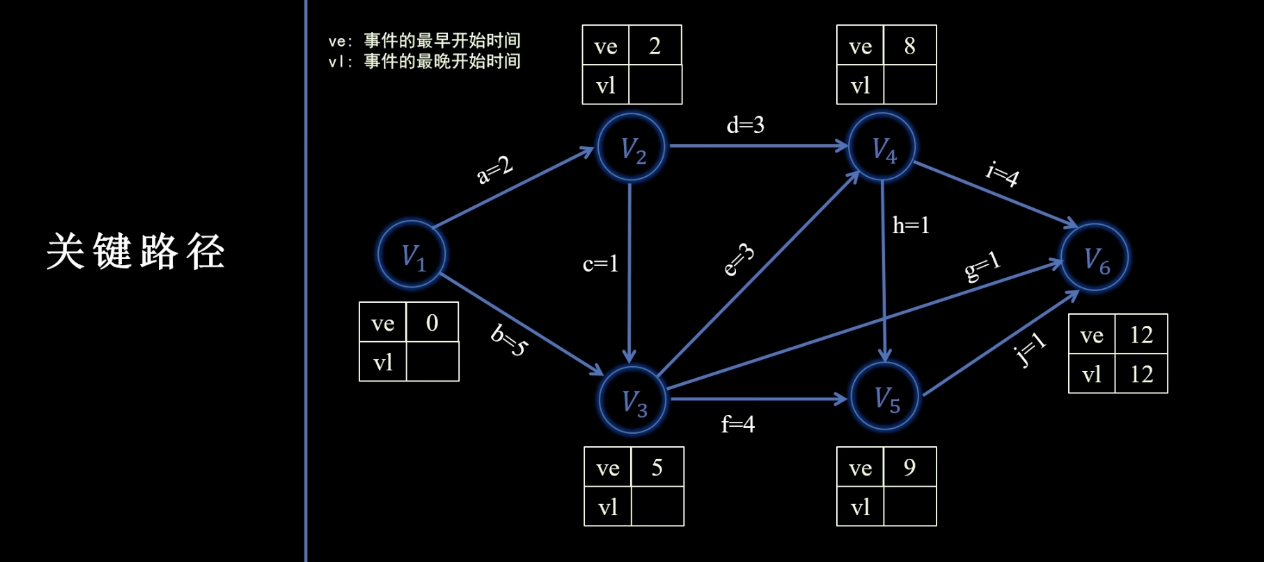
- 在各个顶点处标记ve(事件最早开始时间 初始值为0)和vl(事件最晚开始时间)
-
计算ve:
- v1的ve + 边(活动耗时)得到直接后继顶点(如 v2 的ve = 0 + 2;v3的ve = 0 + 5 ),更新V2和V3的顶点ve的值,记录最大值;
- 当 当前顶点的边都计算完,则删除当前顶点和全部边,继续计算下一个如上方式依此更新顶点ve
- 示意图
-
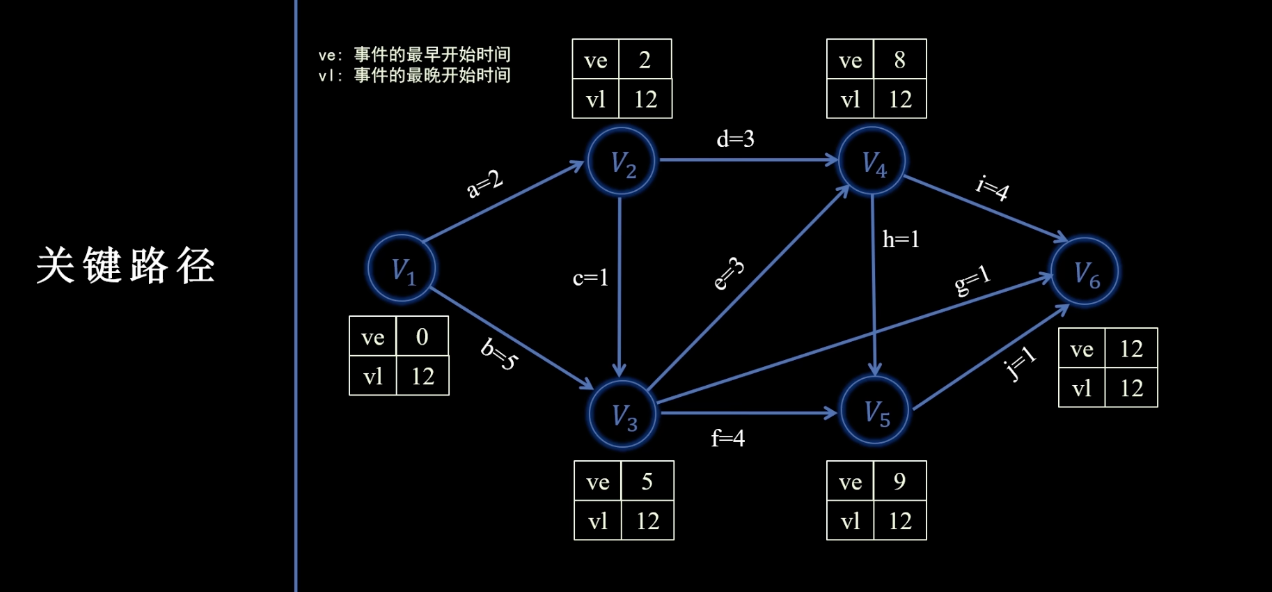
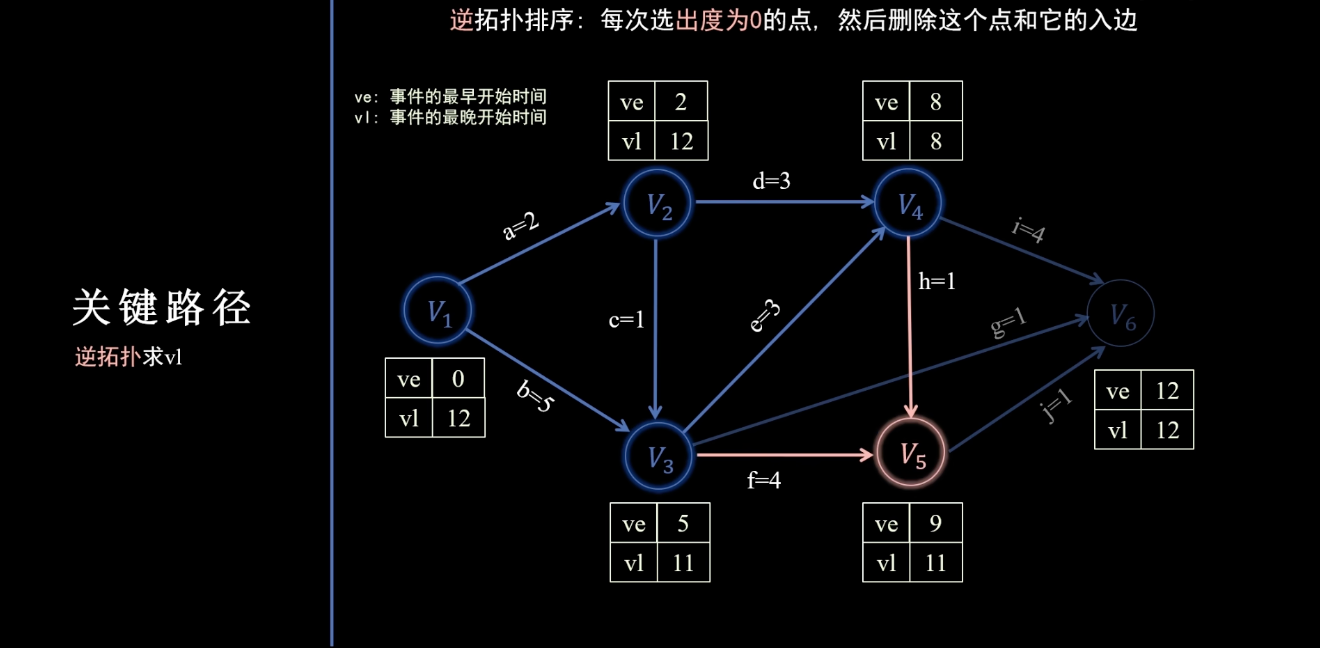
计算vl:逆拓扑排序方法求出最晚开始时间
-
全部顶点的vl更新为终点V6的ve(如图ve = 12)
-
-
倒序、逆箭头方向,逐个vl减去边的值,多个边时更新成最小值,如下图
-
-
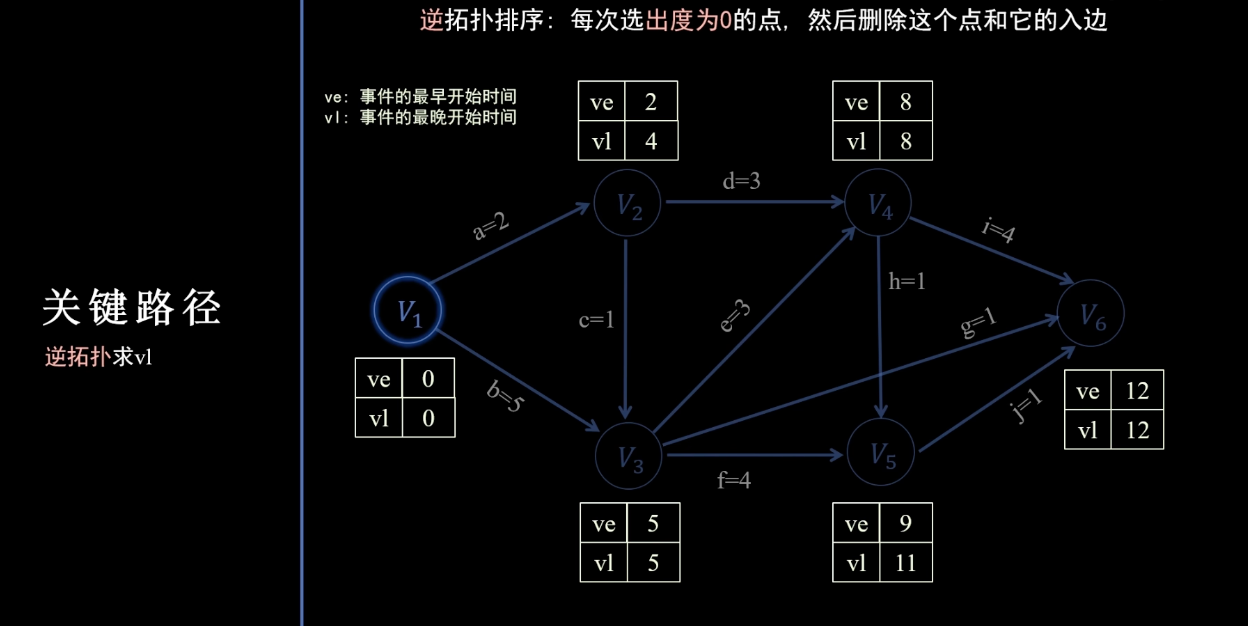
得到各个事件的最早和最晚开始事件结果
-
-
总结:先用拓扑排序计算每个顶点的ve(最早开始时间,记录最大值)逆拓扑计算每个顶点vl(最晚开始时间,记录最小值)
-
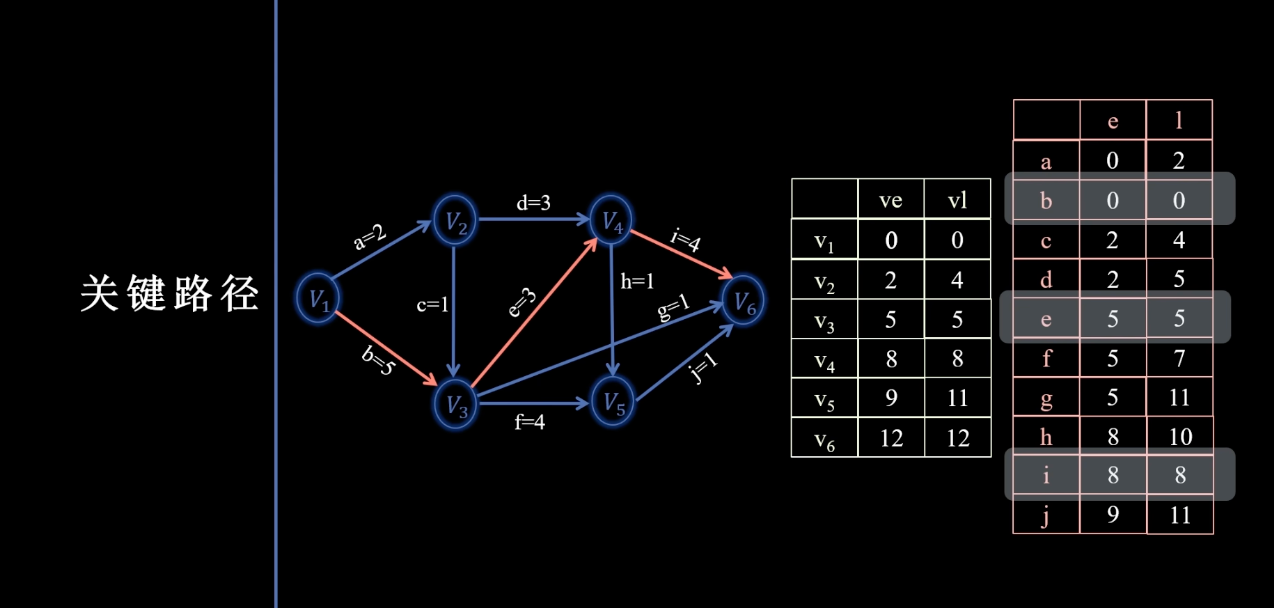
边的最早时间和最晚时间
- 最早时间e:即顶点的最早开始时间,如c、d活动是V2发出,则c和d活动的最早开始时间都是2,以此类推
- 最晚时间l: 即被指向顶点的最晚开始时间 - 活动所需时间,如v3的最晚开始时间是5,则c活动的最晚开始时间是5 - 1 = 4以此类推。
-
汇总成表,各活动的最早和最晚开始时间,找到边(活动)的最早开始时间和最晚开始时间是一样的边,在本图中是b、e、i活动,在途中标出即,关键路径可能不唯一):
-
-
-
- 在各个顶点处标记ve(事件最早开始时间 初始值为0)和vl(事件最晚开始时间)
- 使用拓扑排序方式