导读:
针对生物医学实验室对低成本、高精度自动化设备的迫切需求,设计并开发了一种基于G-code (G代码)的多轴脉冲时序控制的自动移液系统。系统采用模块化架构,以MKS Monster8 V2为主控制器,搭载定制化Marlin固件,集成6个42步进电机,通过推导脉冲--位移--速度关系并以时间基准计算各轴脉冲频率。软件中计算旋转、升降、移液、XYZ轴移动等多轴的同步插补,生成G-code并下发到主控制器,主控制器解释命令并控制电机运动,从而完成生物样本冻存管的开盖/关盖及高精度移液操作。系统采用TMC2209驱动器实现256细分微步控制(精度达0.007˚)。实验结果表明,系统对24孔冻存板的操作成功率(当开盖、关盖的个数超过总数的80%即视为此次操作成功) 100%;移液精度误差率小于3.00%;移动误差率不超过7%,当位移大于10 mm时误差率可不超过0.85%。为中小型实验室提供了高性能自动化解决方案。
作者信息:
李天翔, 吴 畅, 韩 冰, 单文杭, 罗伟峰, 周子为, 陈亚东*:沈阳工业大学电气工程学院,辽宁 沈阳
论文详情
系统总体方案设计与主要的硬件组成
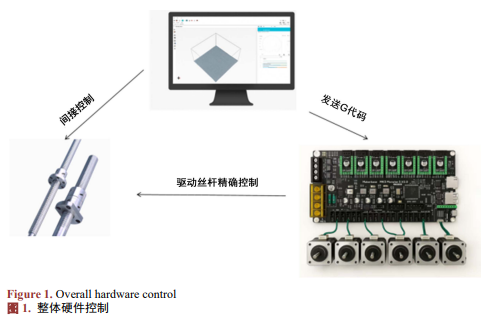
硬件系统由电脑、多轴主控板、步进电机驱动、传动装置、步进电机、3D打印零件等组成。示意图见图1电脑生成运动指令,该指令格式为G-code。
G代码控制算法设计
G-code指令中,常用的运动指令包括G0 (快速定位)与G1 (直线插补)。运动与模式类G0:快速定位(空程,通常不做精确插补);G1:直线插补,带进给率F,用于精确定位与耦合运动;G28:归位(回原点);G90/G91:绝对/相对坐标模式切换。
基于脉冲频率与机械传动参数的多轴协同控制算法
为了实现旋转,移液,定位等多轴运动协同,必须建立"位移--脉冲数--频率"的数学关系,保证在同一时间内相关轴运动相应指定距离。具体操作及算法参见原文链接。
开盖/关盖动作中的多轴协同控制
旋转与升降的同步本质在于,通过脉冲频率的控制,我们可以确保两轴在相同时间内完成各自的运动。为实现旋转与升降的协同控制,我们通过建立A轴旋转轴角位移与Z轴升降轴线位移的映射关系,得到两者之间的同步规则。具体操作参见原文链接。
系统验证
1. 运动精度
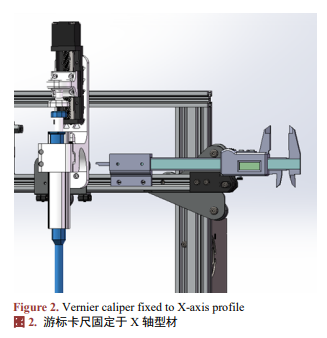
本实验采用得力度数显游标卡尺(DL91150,量程0~150 mm,分辨率0.01 mm,误差 ≤ 0.03 mm),对XYZ轴运动系统进行定位精度与重复性测试。实验通过固定游标卡尺于自动移液平台的XYZ轴的型材上(见图2),结合G代码指令驱动单轴运动,记录实际位移并与G代码命令值对比,验证机械结构与控制系统的匹配性。
基于得力度数显游标卡尺(DL91150,误差 ≤ 0.03 mm),对XYZ轴运动系统进行多位移点测试(0.1 mm、1 mm、10 mm、20 mm、30 mm、40 mm)。每个位移点重复三次测量并取均值。在对X轴测试时发现其误差约为10%。测试结果见表1。
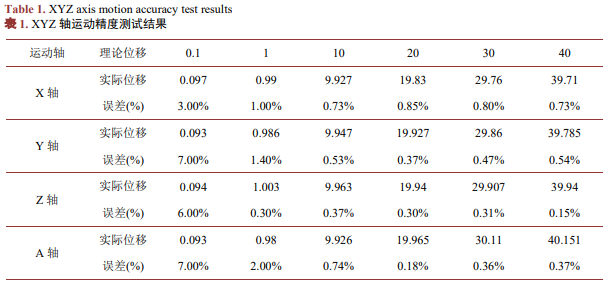
通过本实验可以发现,小位移误差较为显著,X/Y/A/Z轴在0.1 mm位移时误差为3%~7%,其主要原因是游标卡尺系统误差(±0.03 mm)对小位移测量影响放大和丝杆螺母间隙或同步带弹性形变导致微小位移时传动效率下降;与之相对的是大位移精度较高,当位移 ≥ 10 mm时,XYZA轴误差均≤0.85%,表明系统在大范围运动中具备较高稳定性,其中Z轴表现最优(误差 ≤ 0.37%),得益于线性导轨的高刚性及丝杆传动的低回差特性。
2. 移液重量
实验结果如表2所示,整体误差范围为1.50%~3.00%,表明系统在中低体积范围内具备较好的稳定性,但小体积(0.1 mL)误差相对较高。
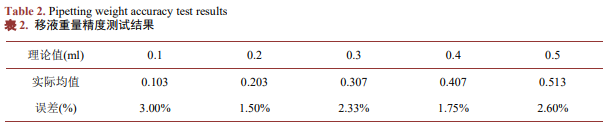
总体而言,小体积误差(如0.1 mL误差3.00%)受活塞初始运动惯性及液体表面张力影响显著;而中体积(如0.4 mL误差1.75%)因系统进入稳态运动阶段,精度表现更优。
3. 开盖关盖率测试结果
在本研究中,开关盖成功的判定标准为:关盖时管盖完全旋紧至指定位置,且无肉眼可见的明显歪斜或松弛。开盖测试结果见表3。关盖测试结果见表4。
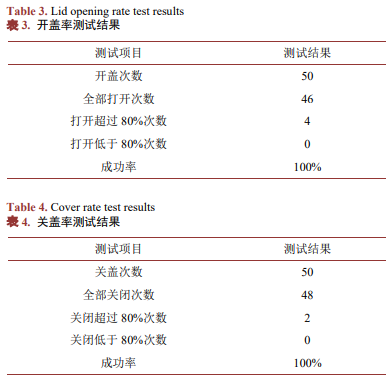
结果表明,该开关盖装置在连续操作中具备较高的可靠性与稳定性,能够稳定实现有效的启闭动作,基本满足实际应用需求。少量未完全开启或关闭的情况多为边缘误差,可能源于机械对位偏差、夹持力或扭矩传递不足、个别冻存管盖紧固程度差异等因素。
总结
本研究成功设计并实现了一套基于MKS Monster8 V2主控制器与定制化Marlin固件的生物样本自动移液设备多轴运动控制系统,通过集成6个42步进电机与TMC2209驱动器构建了高精度(微步控制精度达0.007˚)的多轴协同操作平台。实验验证表明,系统在位移运动的误差率不超过7%。在大位移运动即运动距离在10 mm及以上(误差率 ≤ 0.85%)与中体积移液(误差率 ≤ 1.75%)中表现优异,但小尺度操作精度仍受传动间隙与测量工具限制。
基金项目:
项目类型:辽宁省科技计划。
项目号:2024-MSLH-350。
项目名称:纤维素纳米纤丝和液态金属增强的聚乙烯醇复合水凝胶的研究。
项目类型:辽宁省教育厅面上项目。
项目号:JYTMS20231205。
项目名称:人工智能辅助皮肤瘢痕精准敷贴制备方法的研究。
原文链接: