
GNSS干扰、IMU漂移、多障碍物等复杂环境下,多车协同与避障、路径规划
文章目录
课题背景
无人车协同定位与路径规划是自动驾驶和多机器人系统中的核心问题。复杂环境下多辆无人车需要通过传感器融合、车辆间通信实现精确定位,并协同规划无碰撞路径以完成运输、巡检等任务。
研究内容
协同定位模块
- 扩展卡尔曼滤波(EKF) :融合 G N S S GNSS GNSS、 I M U IMU IMU、里程计数据
- 车辆间相对位置估计:利用车载传感器测量邻车距离和角度
- 协同定位优化:通过信息共享提高定位精度
路径规划模块
- 全局路径规划 :使用改进的 A ∗ A* A∗算法规划最优路径
- 局部路径规划 :动态窗口法( D W A DWA DWA)进行实时避障
- 多车协同:通过优先级分配、轨迹协调和协同定位避免冲突
关键技术
- 卡尔曼滤波:处理传感器噪声,实现状态估计
- A*搜索算法:启发式搜索最短路径
- 动态窗口法:考虑车辆动力学约束的局部规划
- 碰撞检测:多车轨迹冲突检测、车辆间的信息传递、相互测距等
MATLAB实现示例
主要模块
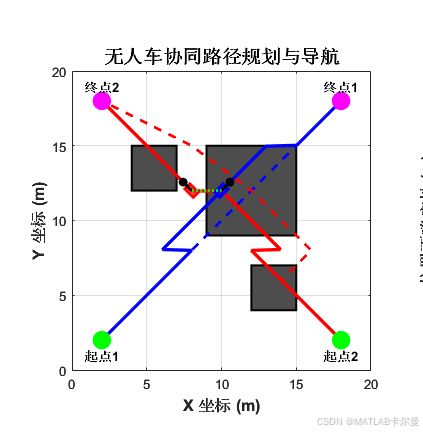
- 环境建模:创建带障碍物的栅格地图
- A*全局规划:为两辆车规划从起点到终点的最优路径
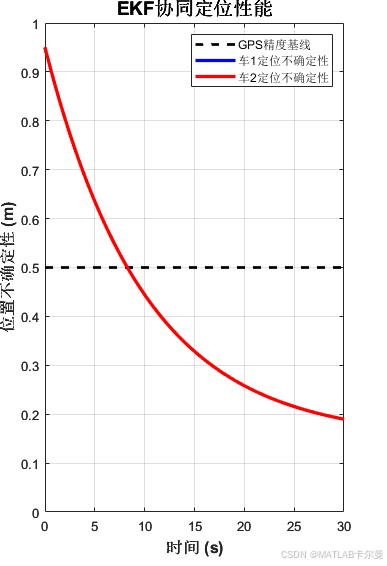
- EKF协同定位 :
- GPS测量更新
- 车辆间相对位置测量
- 协方差估计
- 纯追踪控制:基于规划路径的轨迹跟踪
- 实时可视化:显示车辆运动、路径和定位不确定性
关键参数
map_size: 地图尺寸(米)v_max: 最大速度限制Q: 过程噪声协方差(反映运动模型不确定性)R_gps: GPS测量噪声(0.5米标准差)R_relative: 相对位置测量噪声
部分代码
matlab
% ========================================================================
% 无人车协同定位与路径规划算法
% 功能:双车EKF协同定位 + A*全局规划 + DWA局部避障
% ========================================================================
clear; close all; clc;
%% 1. 环境初始化
% 地图参数(20x20米栅格地图,分辨率0.5米)
map_size = [20, 20];
resolution = 0.5;
grid_size = map_size / resolution;
% 创建障碍物地图(0=自由,1=障碍)
obstacle_map = zeros(grid_size);
obstacle_map(10:15, 10:15) = 1; % 中心障碍物
obstacle_map(5:8, 25:30) = 1; % 右侧障碍物
obstacle_map(25:30, 5:8) = 1; % 左下障碍物
% 车辆参数
dt = 0.1; % 时间步长
v_max = 1.5; % 最大速度 m/s
omega_max = pi/3; % 最大角速度 rad/s
% 初始状态 [x, y, theta, v, omega]'运行效果
程序显示的结果(部分):
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者