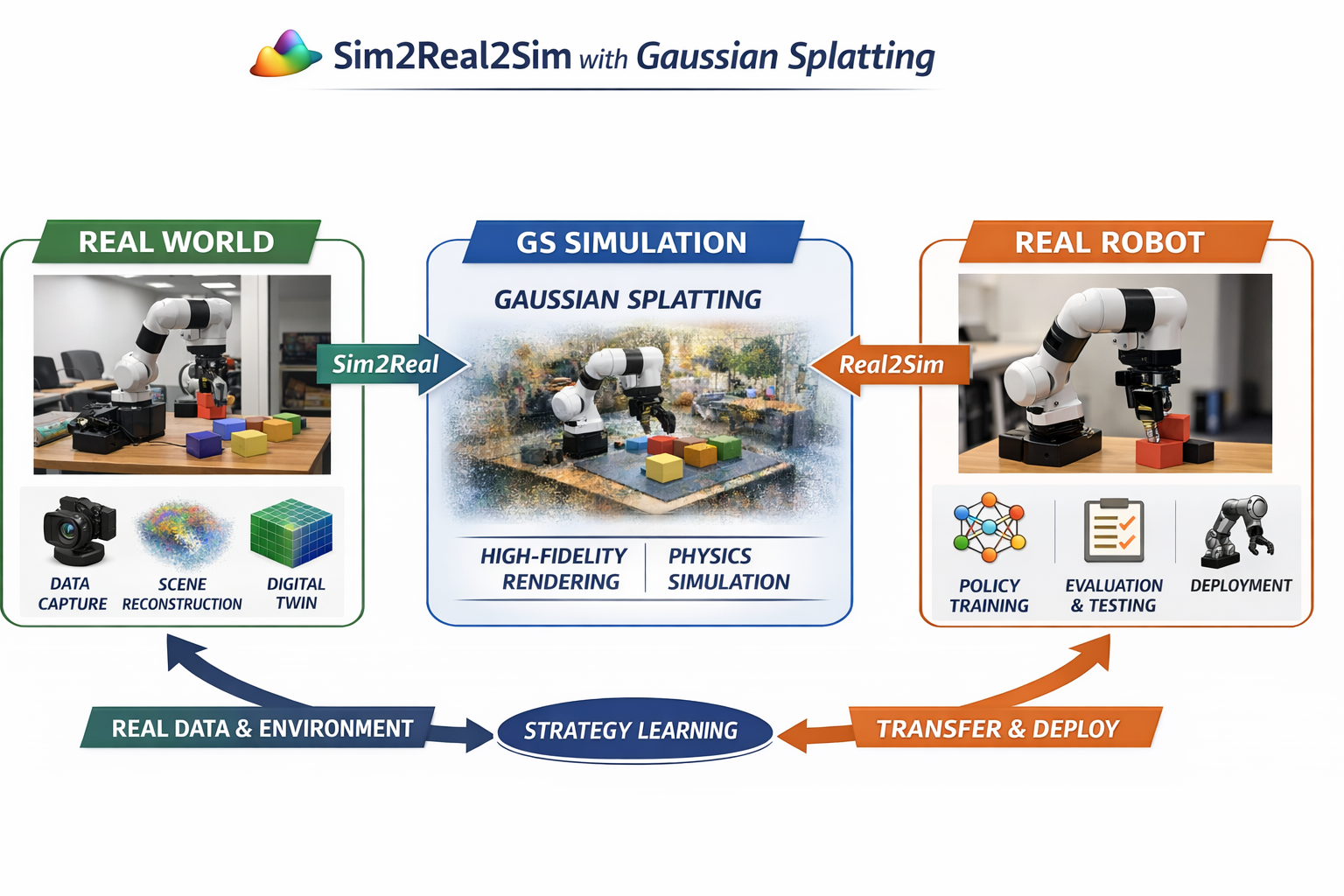
目前基于 GS(Gaussian Splatting,高斯点渲染/重建) 技术的机器人 Sim2Real2Sim(或 Real-Sim-Real / Real2Sim2Real)仿真平台 正在成为一个新的研究热点,主要利用高保真重建和渲染 来缩小仿真与现实之间的视觉与感知差距,从而提高策略迁移效果。以下是已公开的主要平台/框架:
🔹 1) RoboGSim --- Real2Sim2Real 高斯点仿真器
-
一个完整的 闭环机器人仿真平台,专注于 Real → Sim → Real 数据与策略循环。
-
核心通过 3D Gaussian Splatting 重建场景,并与传统仿真引擎(例如 Nvidia Isaac Sim)结合,实现高保真视觉渲染与物理一致性评估。
-
包含:
- Gaussian Reconstructor(基于 GS 重建静态场景)
- Digital Twins Builder(现实世界资产数字孪生构建与布局对齐)
- Scene Composer(多视角场景/对象合成)
- Interactive Engine(闭环策略仿真与评估)
-
用于生成训练数据、策略评估和 Sim2Real 迁移测试。(技术栈1)
📌 特点:强调 高保真渲染 + 低成本数据合成 + 策略闭环评估。
👉 适合需要 大规模复现真实场景视觉特性 的仿真学习/策略迁移任务。
🔹 2) RoboSimGS --- 基于 Gaussian Splatting 的 Real2Sim2Real 框架
-
一个 仿真场景自动构建与策略训练框架,融合了:
- GS 进行场景的 高保真渲染与逼真视觉表现
- 传统物理对象 mesh + 刚体模型 进行准确的物理交互
- (可选)使用 多模态大模型(MLLM) 推断物体动力学 & 运动结构,实现更物理合理的仿真对象生成
-
可用于 训练策略并进行 sim→real 迁移验证。(robosimgs.github.io2)
📌 特点:强调物理系统与高保真视觉联合构建,更适合机械交互任务。
🔹 3) SplatSim --- 高斯渲染驱动的零样本 Sim2Real 平台
- 针对 基于 RGB 视觉的操作策略 提出的一套仿真系统。
- 主要思想是用 高斯点渲染替代传统 mesh 渲染 来显著提高视觉质量,从而减少域差,提升 Sim2Real 迁移性能。
- 可用于 策略训练 + 直接部署到真实机器人(zero-shot)。(splatsim.github.io3)
📌 特点:重点在 渲染质量与视觉域差 而非完整仿真闭环。
🔹 4) GSWorld --- Photo-Realistic 仿真套件(研究方向)
-
近期提出的一个 闭环机器人仿真系统(结合 Gaussian Splatting 与物理引擎),用于:
- 零样本 Sim2Real 控制策略
- 自动高质量 DAgger 数据采集
- 可重复评估真实策略
- 通过虚拟遥操作生成数据
-
实验包含不同机器人平台及丰富交互任务。(arXiv4)
📌 尚处于研究/预发表状态,但展示了未来 Sim2Real2Sim 框架的可能方向。
🧠 总结对比
| 平台 / 框架 | 使用 Gaussian Splatting | 主要侧重点 | 是否闭环 ⇄ |
|---|---|---|---|
| RoboGSim | ✓ | 高保真渲染 + 真实/仿真闭环 | 是 |
| RoboSimGS | ✓ | 自动化场景重建 + 物理交互 | 部分 |
| SplatSim | ✓ | 高质量视觉渲染 + Sim2Real 策略 | 是(视觉迁移) |
| GSWorld | ✓ | Photo-Realistic + 仿真策略评估 | 研究阶段 |