DDMA MIMO OFDM ISAC:从回波模型到距离-速度图与非相参积累的原理梳理
毫米波 ISAC(通信与感知一体化)里,OFDM 波形天然具备"频域子载波 + 慢时间符号序列"的二维结构:
-
子载波维携带"距离(时延)"信息
-
符号维(慢时间) 携带"速度(多普勒)"信息
当把多天线 MIMO 引入后,还需要让不同发射通道在接收端可分离。这里采用的是 DDMA(Doppler Division Multiple Access / Doppler Division Multiplexing) 思想:通过在慢时间上施加不同的相位坡度,让不同发射天线的回波在多普勒维上"分槽",从而实现 MIMO 复用。
本文用一个典型的 DDMA MIMO-OFDM 雷达感知链路,解释如何得到两类可视化结果:
-
原始距离-速度图(Range-Velocity Map, RV Map)
-
非相参积累后的输出图(把 DDMA 的多个多普勒"子带"合并以增强检测)
1. OFDM 的二维"测距 + 测速"机制
1.1 子载波相位与时延(距离)
对于单个目标,往返传播引入时延 τ=2r/c\tau = 2r/cτ=2r/c。在 OFDM 中,时延在频域表现为对子载波的线性相位:
H(n)∝e−j2πnΔfτ H(n) \propto e^{-j2\pi n\Delta f \tau} H(n)∝e−j2πnΔfτ
因此,对子载波维做 逆 FFT(IFFT) 即可把这种线性相位"聚焦"为距离域的峰值,得到距离像(range profile)。距离分辨率由带宽决定:
Δr=c2B \Delta r = \frac{c}{2B} Δr=2Bc
1.2 符号间相位与多普勒(速度)
目标速度 vvv 产生多普勒频移 fd=2vfccf_d = \frac{2v f_c}{c}fd=c2vfc。在慢时间(OFDM 符号序列)上表现为相位随符号索引 mmm 的线性累积:
ej2πfdmTsym e^{j2\pi f_d m T_\text{sym}} ej2πfdmTsym
因此,对慢时间维做FFT即可得到多普勒谱,从而估计速度。速度分辨率与 CPI 时长相关(符号数越多、符号周期越长,速度分辨率越高)。
2. DDMA:用"慢时间相位坡度"把多发射通道分开
在 DDMA MIMO-OFDM 中,不同发射天线并不使用正交码或不同频带,而是对每个发射通道施加一个固定的"跨符号相位增量":
xq(m)∼ejmφq x_q(m) \sim e^{jm\varphi_q} xq(m)∼ejmφq
其中 qqq 表示第 qqq 个发射天线,φq\varphi_qφq 是该通道对应的 DDMA 相位步进。
直观理解:
对慢时间施加线性相位,相当于给该发射通道"人为引入一个额外的多普勒偏移"。于是同一个物理目标,在不同 Tx 通道对应的处理结果中,会出现在不同的多普勒位置(或形成周期性复制的峰值),从而实现通道分离/可区分。
3. 目标回波模型:时延 + 多普勒 + 多通道叠加
对每个目标,回波可以理解为"发射信号的延迟版本"叠加上"多普勒调制",再乘以散射系数(与 RCS 相关)。当场景中有多个目标时,接收信号是各目标回波的线性叠加。
在这种建模方式下,多普勒对 OFDM 正交性的破坏(即 ICI)会自然出现:因为多普勒会让一个 OFDM 符号内部产生相位旋转,导致子载波间能量泄漏。
这也是为什么在低信噪比或较大速度时,原始 RV 图里往往会出现旁瓣抬升、杂散等现象。
4. 4 发 4 收在这里"等效做了什么"?
在这里的 4Rx 处理采用了一个简单但常用的等效假设:
-
目标在阵列正前方,4 个接收通道对目标回波相位一致
-
每路接收叠加独立噪声
-
接收端把 4 路信号做相干合并(复数相加)
这等价于在不做角度估计/波束形成的情况下,直接获得一个 NRxN_{Rx}NRx 倍的阵列增益(噪声独立时 SNR 提升接近 10log10NRxdB10\log_{10}N_{Rx} dB10log10NRxdB。
因此,在同样的"单路定义的 SNR"下,4Rx 合并后的 RV 图会更干净、目标峰更突出。
如果要更真实地体现阵列效应,需要引入阵元间距与目标方位角,4Rx 的相位会不同,合并前应进行角度相关补偿或波束形成;但当只关注距离-速度检测时,上述"同相合并"是一个合理的简化版本。
5. 接收处理链路:从 ISAC OFDM 到距离-速度图
5.1 "除去通信符号"的通道估计
由于 ISAC 场景下 OFDM 子载波上承载了通信数据符号 A(n,m)A(n,m)A(n,m),直接对接收信号做 2D FFT 会把通信调制当成随机相位/幅度干扰。
因此常见处理是:
-
对每个 OFDM 符号做 FFT,得到 Y(n,m)Y(n,m)Y(n,m)
-
用已知的调制符号 A(n,m)A(n,m)A(n,m) 去"解调/消除":
H(n,m)≈Y(n,m)A(n,m) H(n,m) \approx \frac{Y(n,m)}{A(n,m)} H(n,m)≈A(n,m)Y(n,m)
这样得到的 H(n,m)H(n,m)H(n,m) 更接近"雷达等效信道",其中包含目标的时延与多普勒信息。
5.2 2D 变换形成 RV Map
接下来对 H(n,m)H(n,m)H(n,m) 做二维变换:
-
子载波维 IFFT → 距离域聚焦
-
慢时间维 FFT → 多普勒域聚焦
得到二维矩阵 Z(r,v)Z(r,v)Z(r,v),即距离-速度图。
为了旁瓣控制,通常会在距离维和速度维分别加窗(如 Hamming 窗),以抑制泄漏与旁瓣。
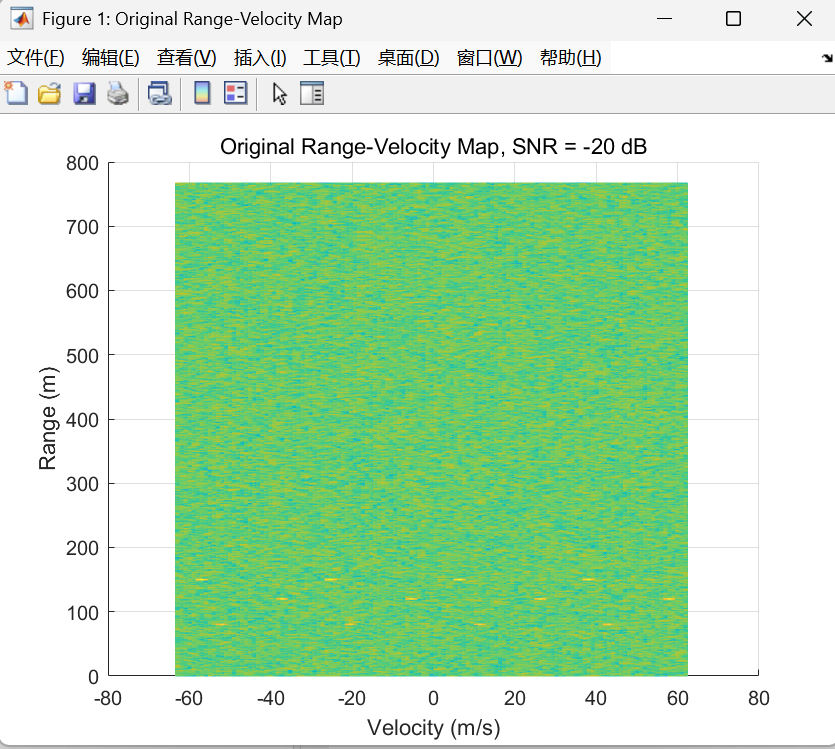
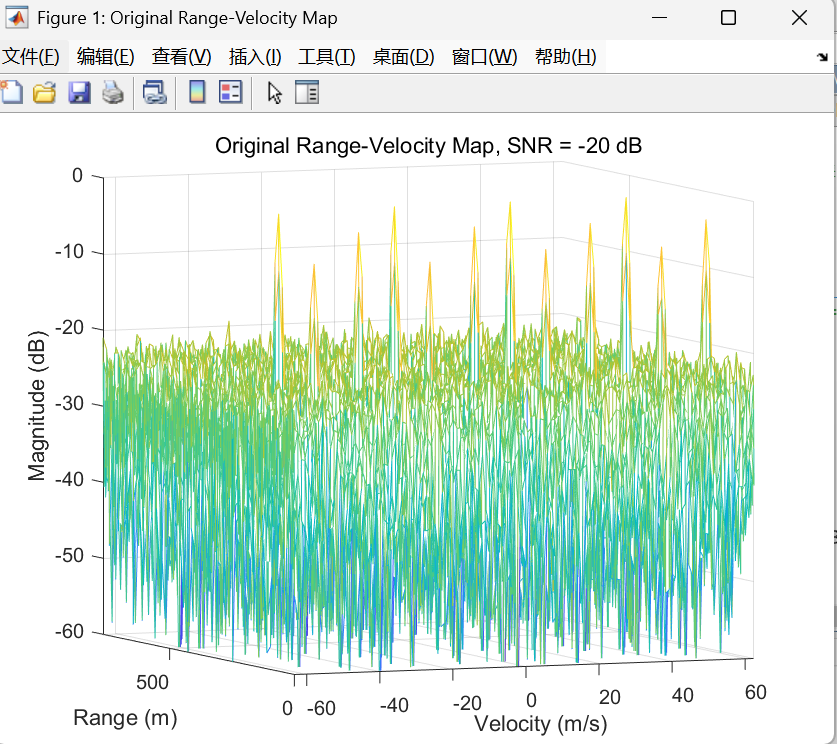
原始 RV 图 展示的就是 Z(r,v)Z(r,v)Z(r,v) 的幅度(通常归一化后取 dB)。
6. 为什么需要"非相参积累"?它在 DDMA 里起什么作用?
DDMA 的关键副作用是:
由于不同 Tx 通道在多普勒维上被"分槽"或产生周期扩展,同一个物理目标的能量不会只集中在一个多普勒位置,而会分布到多个与 Tx 相关的子结构中。
因此,如果只看原始 RV 图,你会看到目标在速度维可能出现多个复制峰、或者能量被分散,导致单点峰值不够强、检测不够稳健。
6.1 子带划分(folding)
在 DDMA 中可以把速度维按发射通道数 NTxN_{Tx}NTx 划分成 NTxN_{Tx}NTx 个子带 (每个子带长度 I=Ns/NTxI= N_s/N_{Tx}I=Ns/NTx)。
每个子带里包含同一物理目标的一个"对应分量"。把这些子带合并,就能恢复更集中的目标能量。
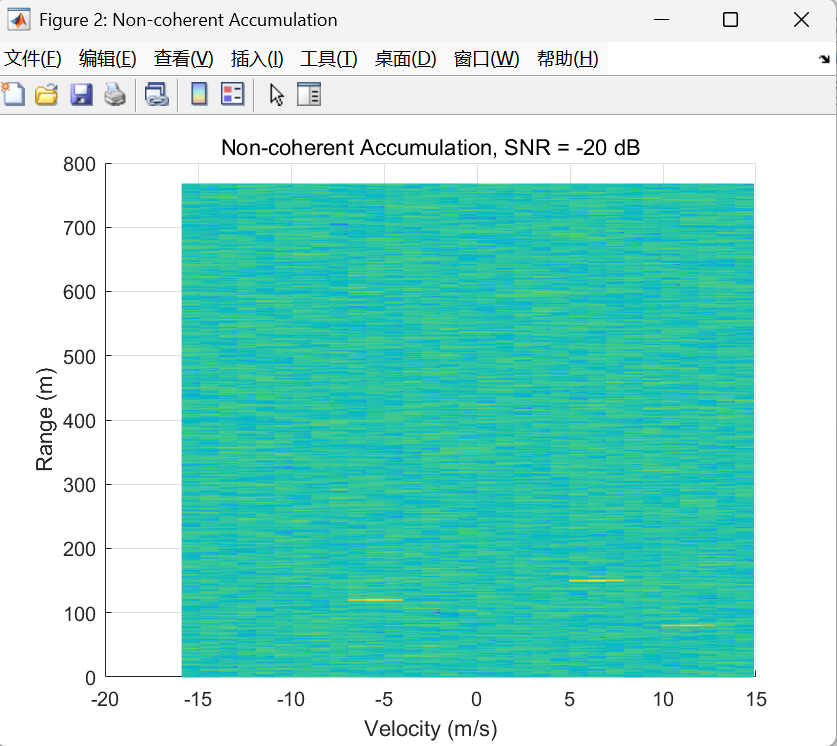
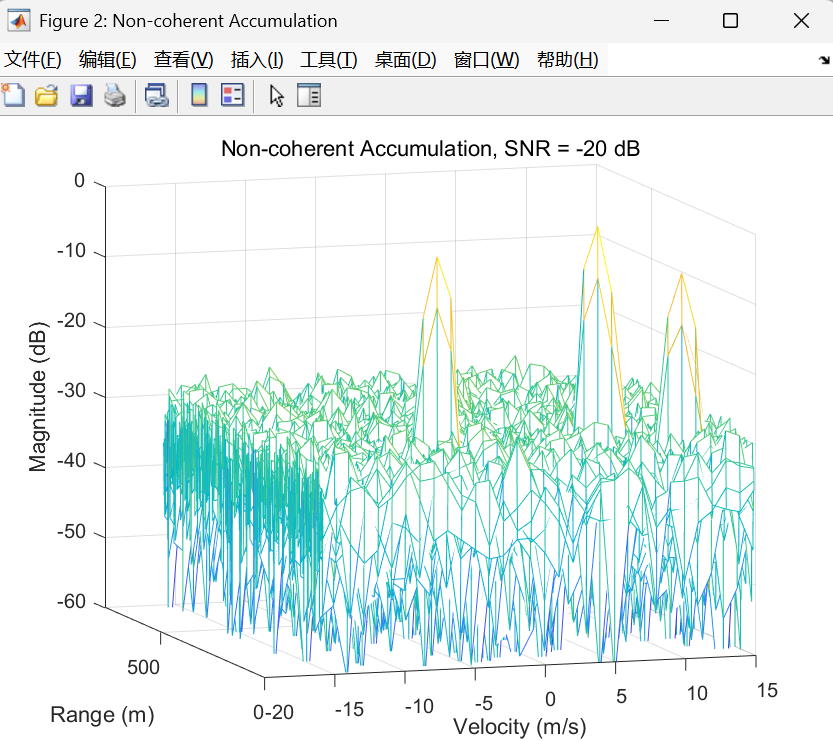
6.2 非相参积累
所谓"非相参"在这里采用的是一个计算简单、鲁棒的做法:对子带做复数直接相加(也可理解为一种不依赖精确相位对齐的合并策略):
-
不需要估计每个子带间的精确相位关系
-
运算复杂度低
-
在低 SNR 下能显著提高目标可见性(等效提高检测统计量)
合并后的输出矩阵维度从 NsN_sNs 压缩为 III,速度轴也随之变为"折叠速度轴"。
7. 仿真结果