GCN and Mamba的 理论相似性
持续更新ing
文章目录
- [GCN and Mamba的 理论相似性](#GCN and Mamba的 理论相似性)
-
- 信号处理
- 傅里叶变换
- [GCN------Spectral Graph Theory](#GCN——Spectral Graph Theory)
-
- 图定义
- 图谱理论中的低频与高频
- 节点频率的解释
- 图信号傅里叶变换与逆变换
- 图信号的过滤
- [ChebNet------Chebyshev 多项式递归](#ChebNet——Chebyshev 多项式递归)
- [GCN------renormalization trick](#GCN——renormalization trick)
- SSM/S4/HiPPO/Mamba
-
- 第一阶段:投影与系数提取
-
- [定义测度_ (Measure) 与空间](#定义测度 (Measure) _与空间)
- [定义基底_ (Basis)](#定义基底 (Basis)_)
- [最优系数提取_ (Projection)](#最优系数提取 (Projection)_)
- 第二阶段:最优系数的动态变化
-
- 对系数求导
- [推导矩阵 B (边界项)](#推导矩阵 B (边界项))
- [推导矩阵 A (内部变化项)](#推导矩阵 A (内部变化项))
- 连续时间微分方程 (ODE)
- 第三阶段:离散化 (Discretization)
-
- 积分求解
- [2. 导出离散参数](#2. 导出离散参数)
- [第四阶段:Mamba 的选择性](#第四阶段:Mamba 的选择性)
- 总结:从数学到代码
- [GCN 与 SSM/Mamba 的相似性](#GCN 与 SSM/Mamba 的相似性)
-
- 经典傅里叶变换
- 图傅里叶变换
- [Mamba / HiPPO (State Space Models)](#Mamba / HiPPO (State Space Models))
- Transformer (Self-Attention)
- RNN
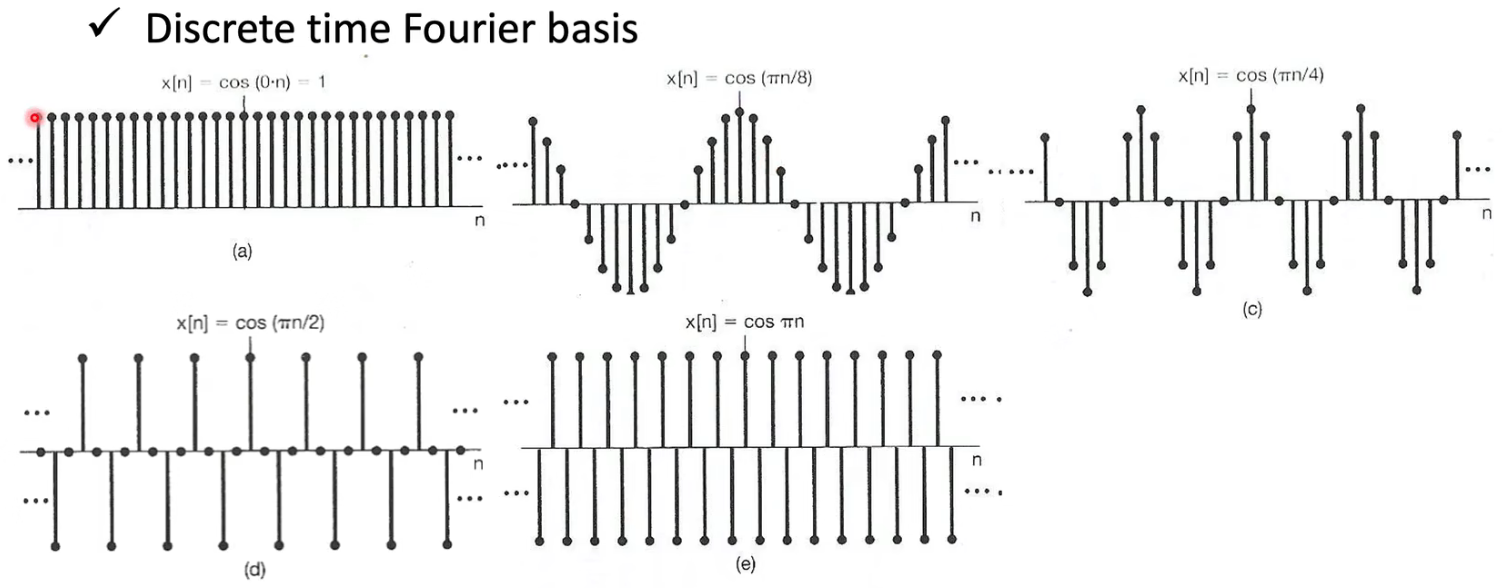
信号处理
- N 维向量空间
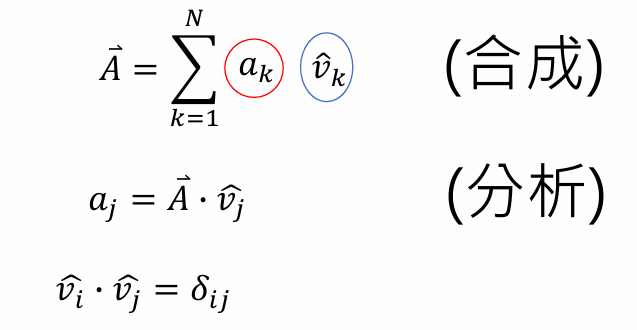
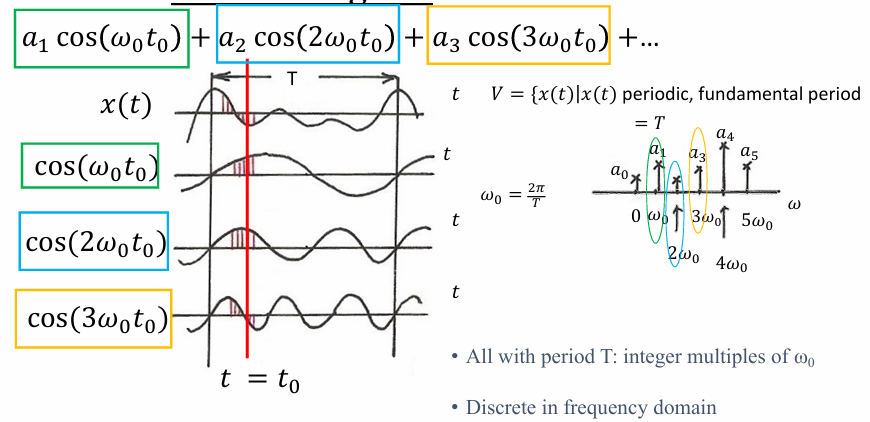
- a k a_k ak的定义
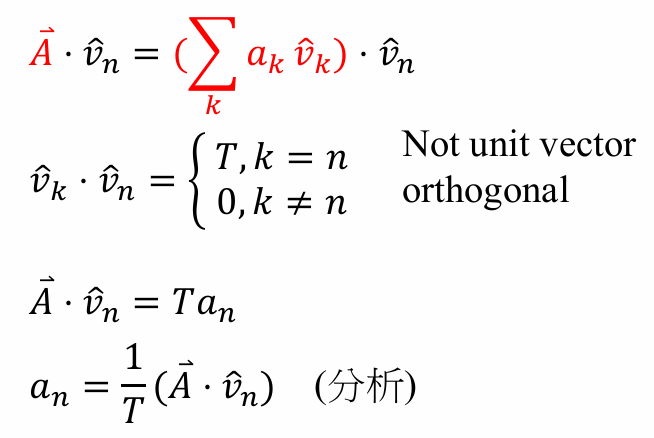
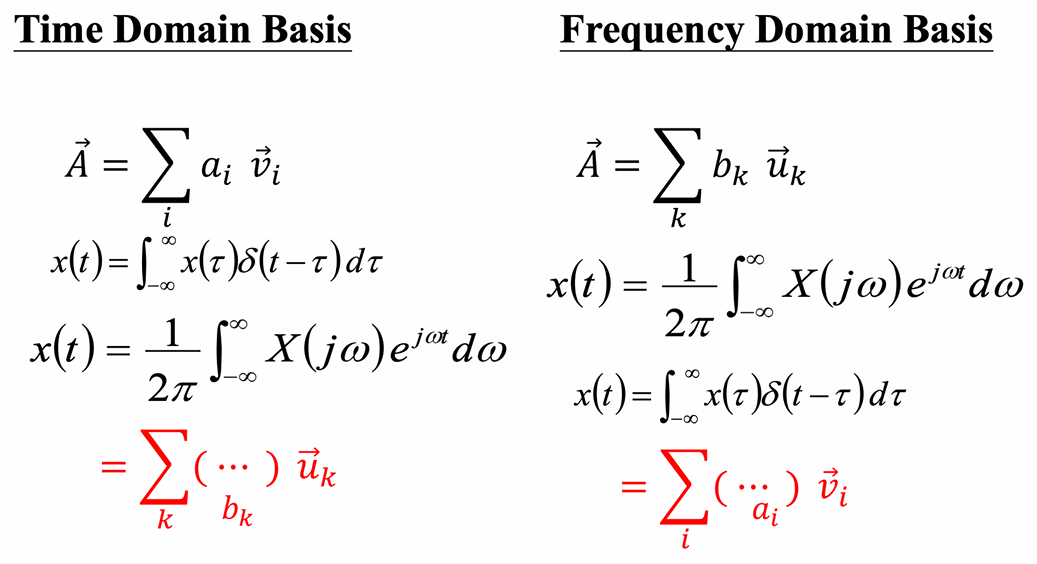
- 时域与频域的信号表达式
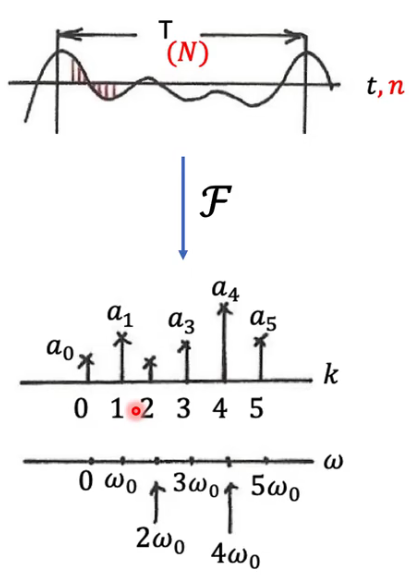
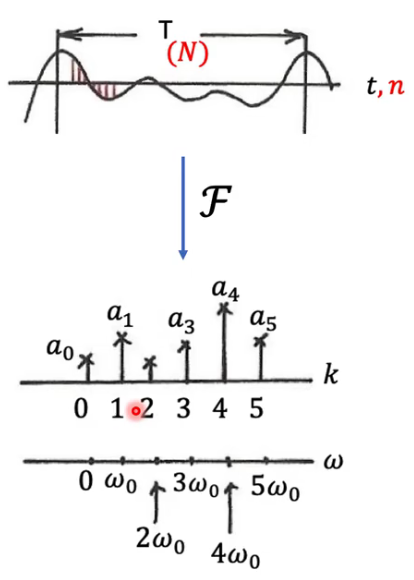
傅里叶变换
傅里叶变换认为,世界上的任何一段波(无论多复杂),都可以看作是一堆简单的"正弦波"叠加而成的。
- 傅里叶变换 (FT) :是**"拆解"**的过程。把时域信号拆解为频域信号。
- 逆傅里叶变换 (IFT) :是**"重组"**的过程。把频域信号还原为时域信号。
傅里叶变换 (FT):从时间到频率 (The Decomposition)
目标 :把一个随时间变化的信号 f ( t ) f(t) f(t)(比如一段录音波形),转换成随频率变化的函数 F ( ω ) F(\omega) F(ω)(比如乐谱)。
数学公式
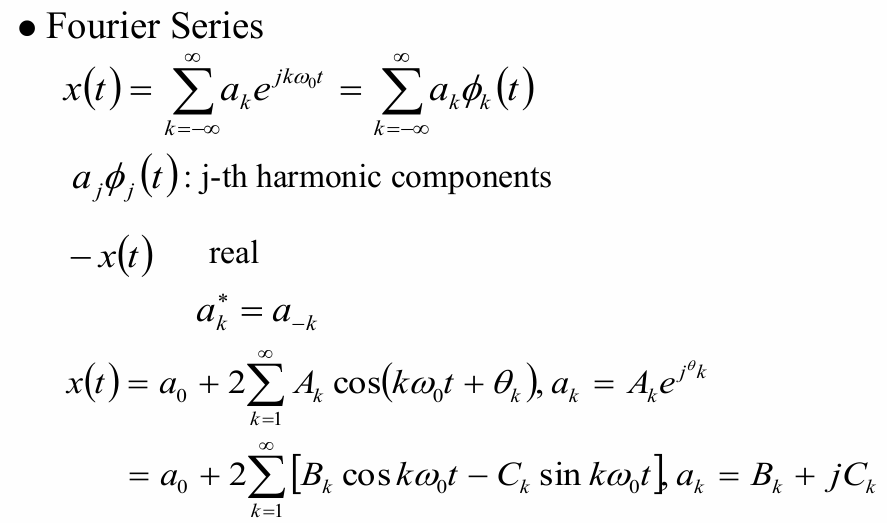
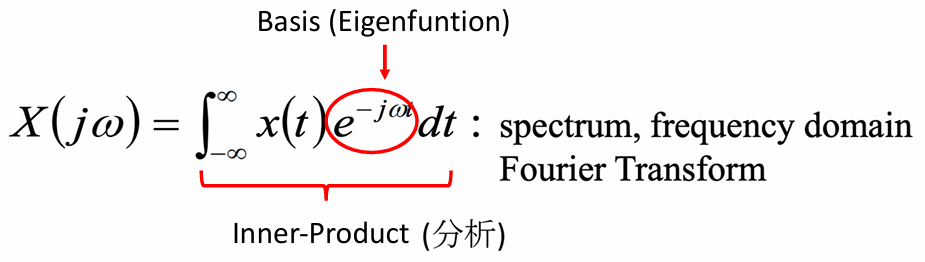
F ( ω ) = ∫ − ∞ ∞ f ( t ) e − i ω t d t F(\omega) = \int_{-\infty}^{\infty} f(t) e^{-i\omega t} \, dt F(ω)=∫−∞∞f(t)e−iωtdt
- f ( t ) f(t) f(t):原始信号。
- e − i ω t e^{-i\omega t} e−iωt:"筛子"。根据欧拉公式 e − i x = cos x − i sin x e^{-ix} = \cos x - i\sin x e−ix=cosx−isinx,它代表一个频率为 ω \omega ω 的螺旋线(或正弦波)。
- 积分 ∫ \int ∫:就是计算"内积"或"相关性"。它在问:"信号 f ( t ) f(t) f(t) 和频率 ω \omega ω 的正弦波有多像?"
- F ( ω ) F(\omega) F(ω):结果。它告诉我们在频率 ω \omega ω 处,信号的振幅 (有多响)和相位(什么时候开始响)。
逆傅里叶变换 (IFT):从频率到时间 (The Reconstruction)
目标 :已知每个频率的成分 F ( ω ) F(\omega) F(ω),把它们加起来,还原回原始波形 f ( t ) f(t) f(t)。
数学公式
f ( t ) = 1 2 π ∫ − ∞ ∞ F ( ω ) e i ω t d ω f(t) = \frac{1}{2\pi} \int_{-\infty}^{\infty} F(\omega) e^{i\omega t} \, d\omega f(t)=2π1∫−∞∞F(ω)eiωtdω
- F ( ω ) F(\omega) F(ω):配方表(各个频率的权重)。
- e i ω t e^{i\omega t} eiωt:原材料(各个频率的正弦波)。
- 积分 ∫ \int ∫:把所有原材料按照配方表加起来(叠加)。
- f ( t ) f(t) f(t):还原出的原始信号。
为什么要提到它?与 Mamba/S4 的关系
在你之前关于 Mamba 的问题中,我们提到了 FFT(快速傅里叶变换)和卷积定理。
- 卷积定理:时域上的卷积 = 频域上的乘法。
Convolution ( f , g ) ↔ F ( ω ) ⋅ G ( ω ) \text{Convolution}(f, g) \leftrightarrow F(\omega) \cdot G(\omega) Convolution(f,g)↔F(ω)⋅G(ω)
- S4 的策略:
S4 是线性时不变系统(LTI),它的计算本质是卷积。卷积很难算( O ( N 2 ) O(N^2) O(N2))。
所以 S4 先用 FT 把信号变成频谱,做简单的乘法( O ( N ) O(N) O(N)),再用 IFT 变回来。这大大加速了计算。
- Mamba 的策略:
Mamba 的参数是随时间变的(不是 LTI),所以不能用卷积定理,也就不能用 FFT 加速。因此,Mamba 被迫发明了**"并行扫描 (Parallel Scan)"** 算法来替代 FFT 的地位。
GCN------Spectral Graph Theory
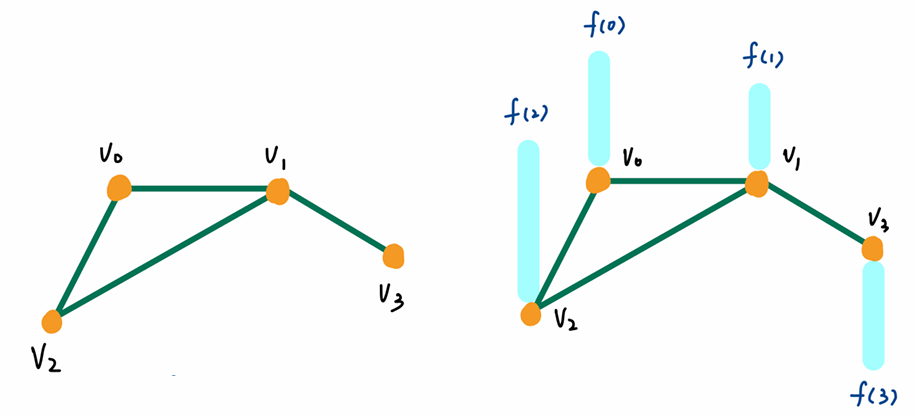
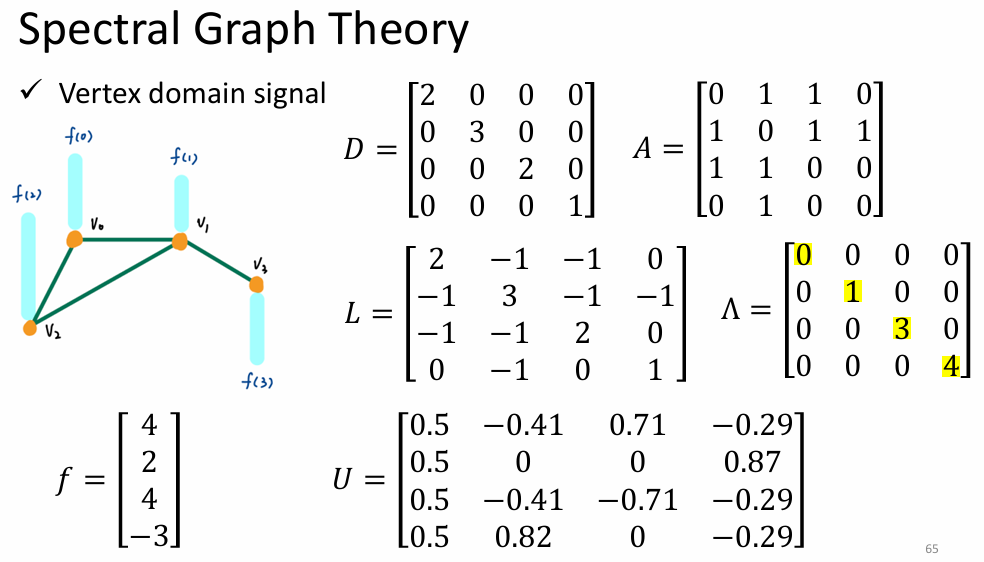
图定义
- 图的特征定义
- example
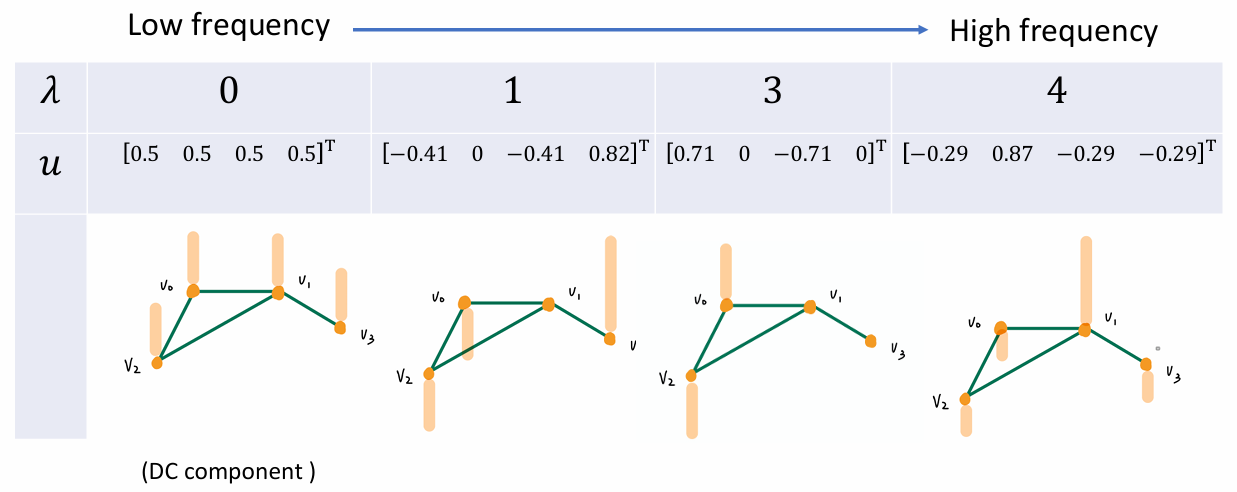
图谱理论中的低频与高频
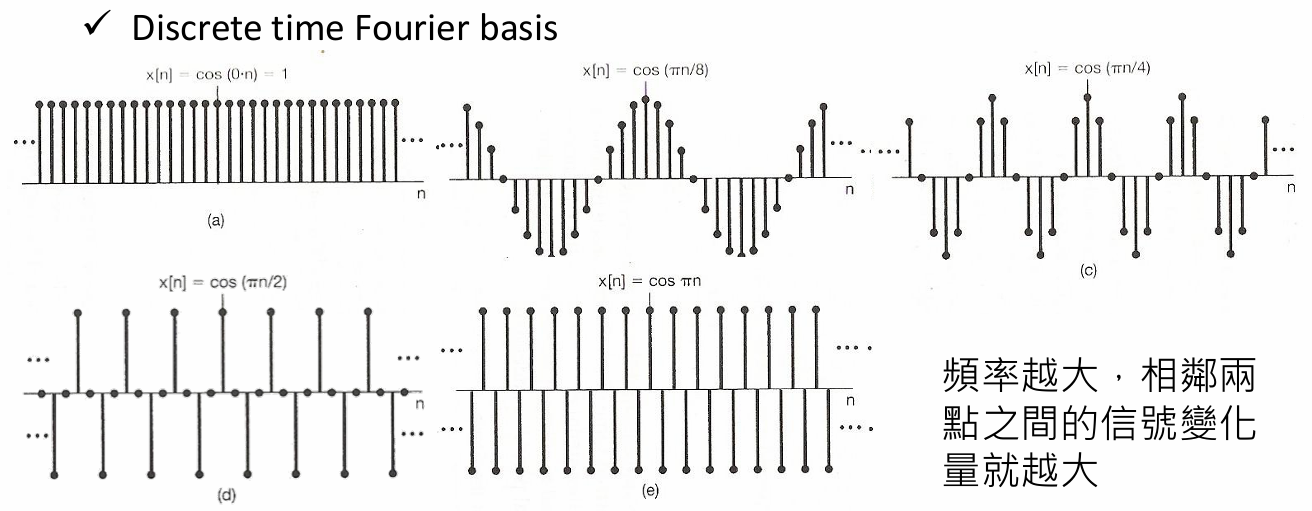
节点频率的解释
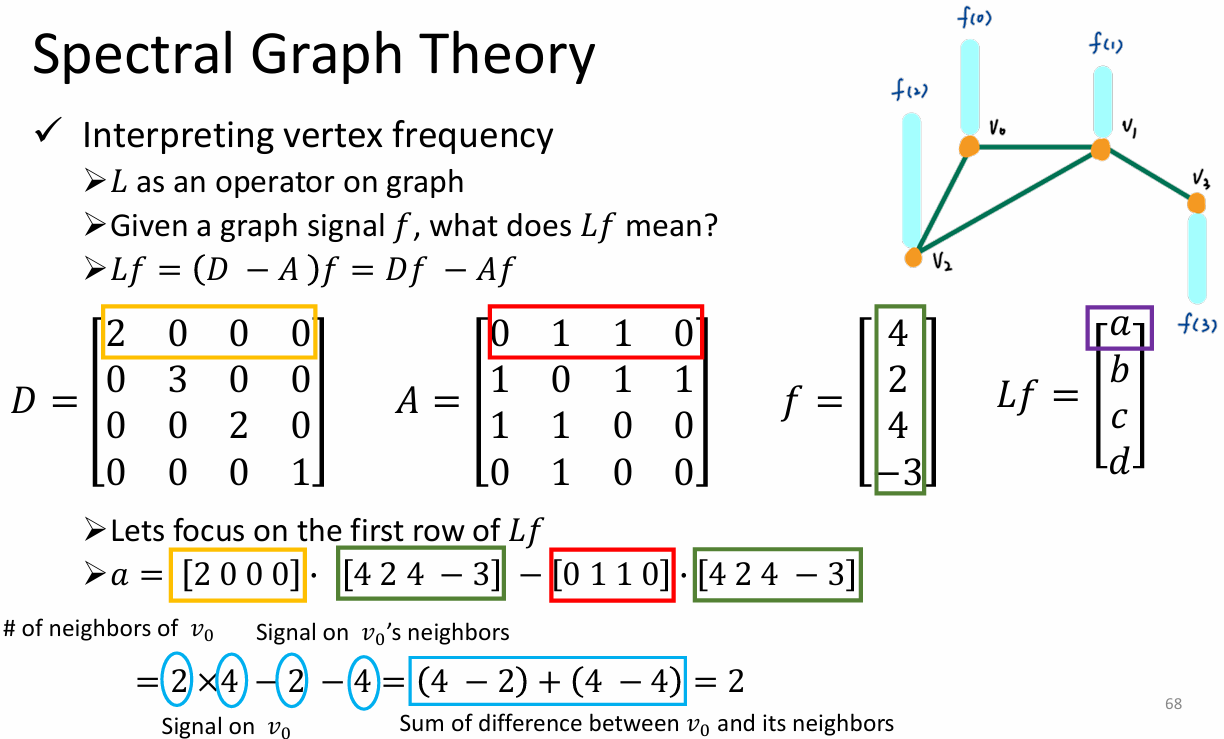
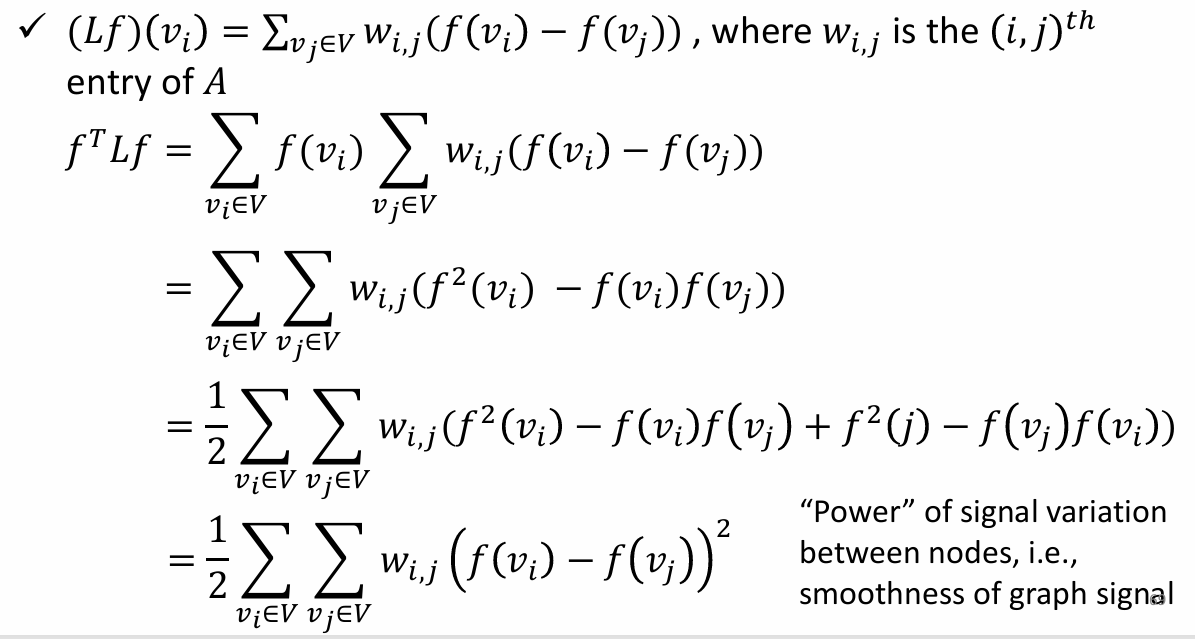
TODO:这里的 Power 和 Mamba 里的概率度量有没有什么联系?

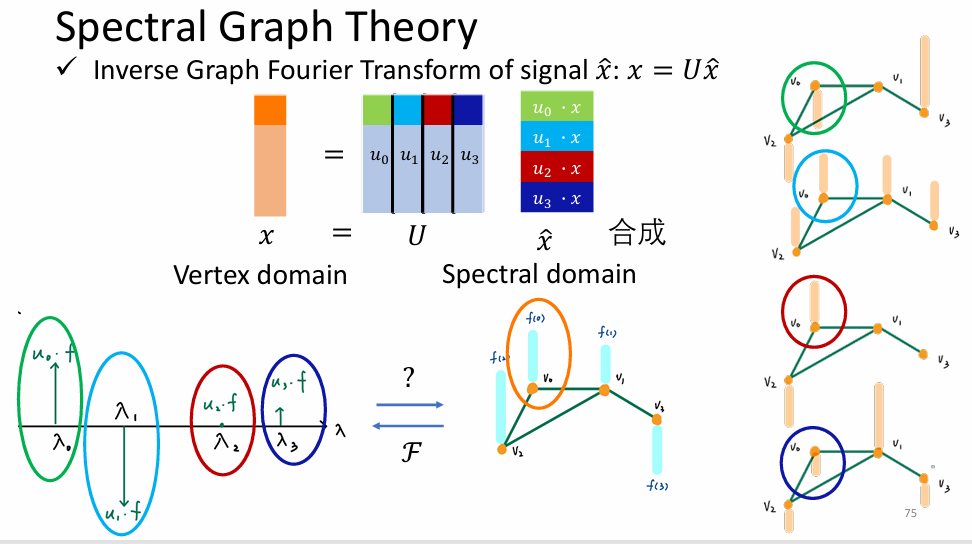
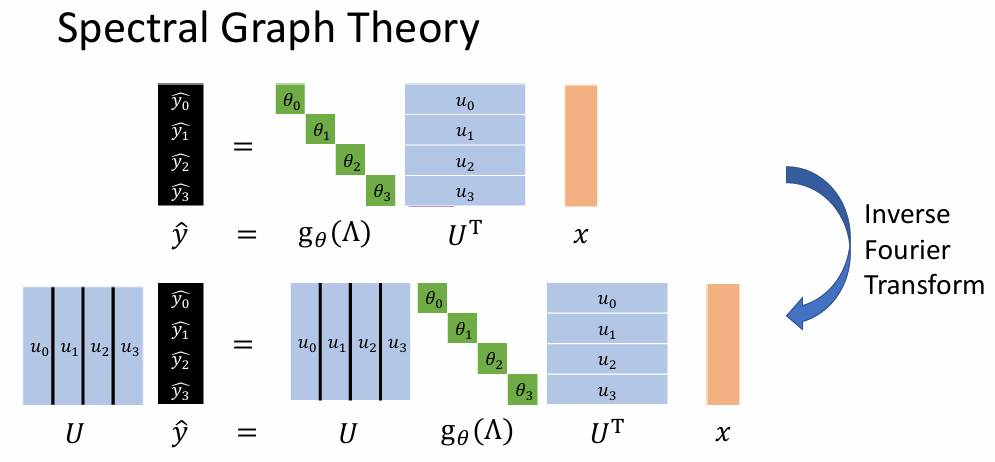
图信号傅里叶变换与逆变换
- 傅里叶变换
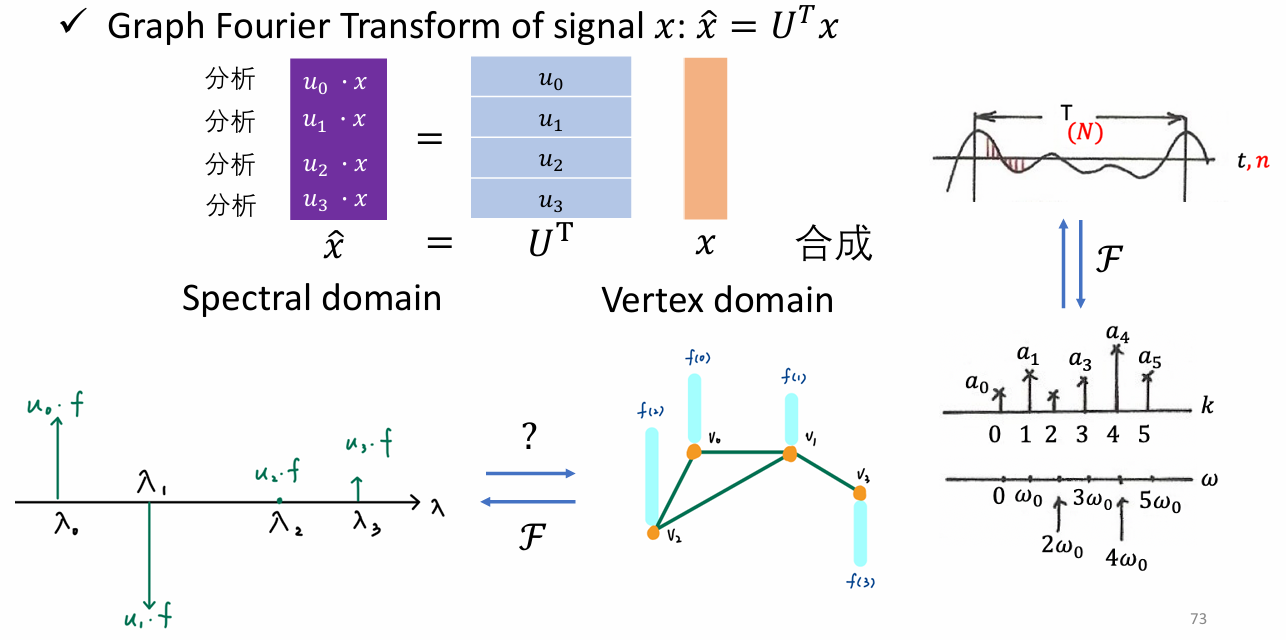
- 逆傅里叶变换
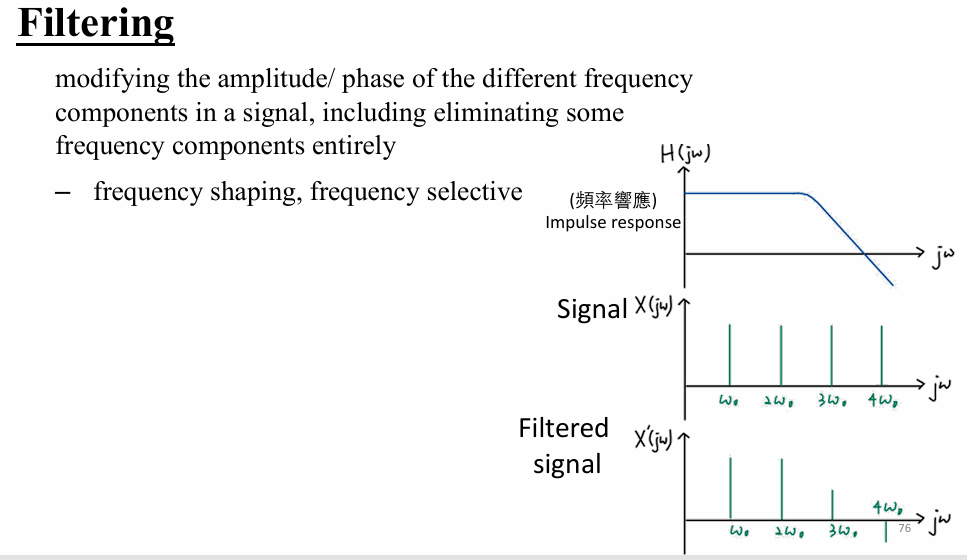
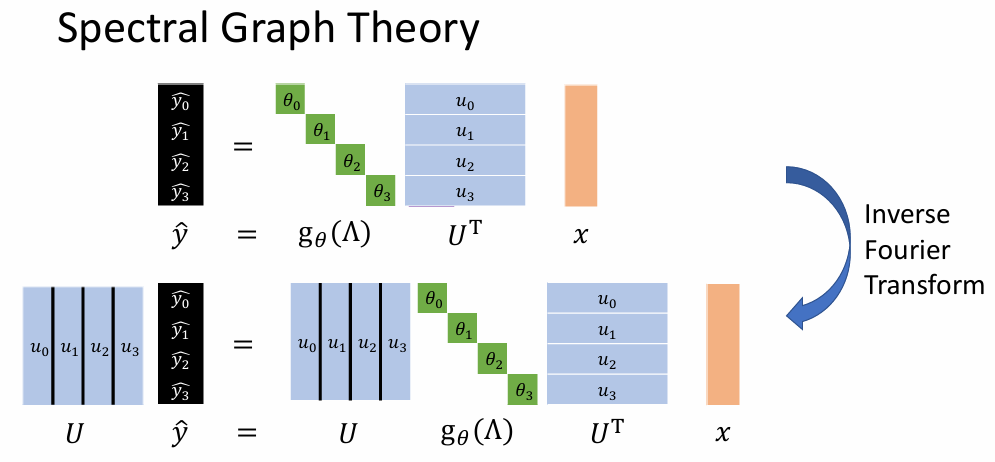
图信号的过滤
- Filtering
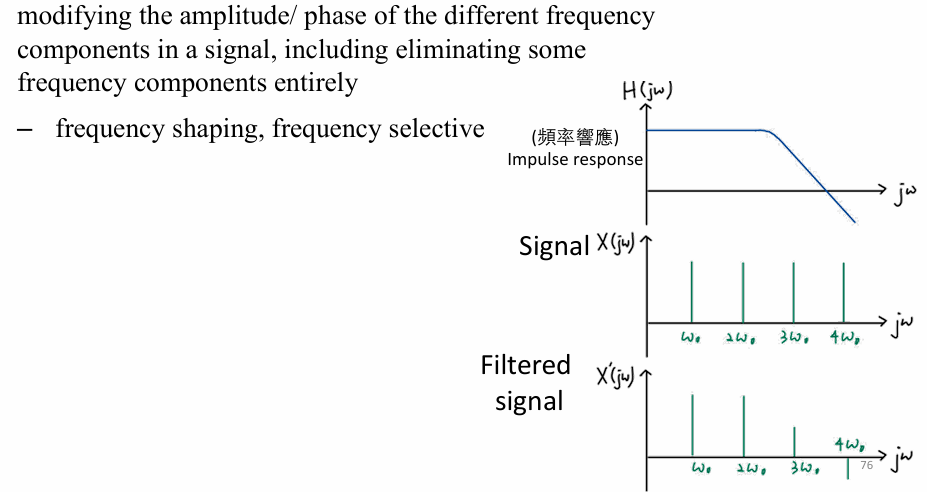
- 图谱信号过滤
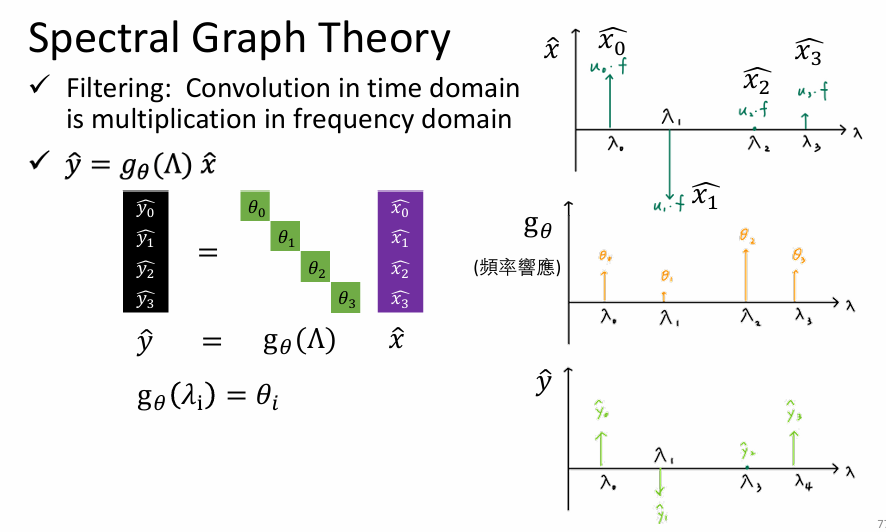
这里的过滤其实就是在做注意力机制的过程!他从频率的角度聚合历史信号,筛选有用的频率信号。
- 图谱信号过滤后逆傅里叶变换
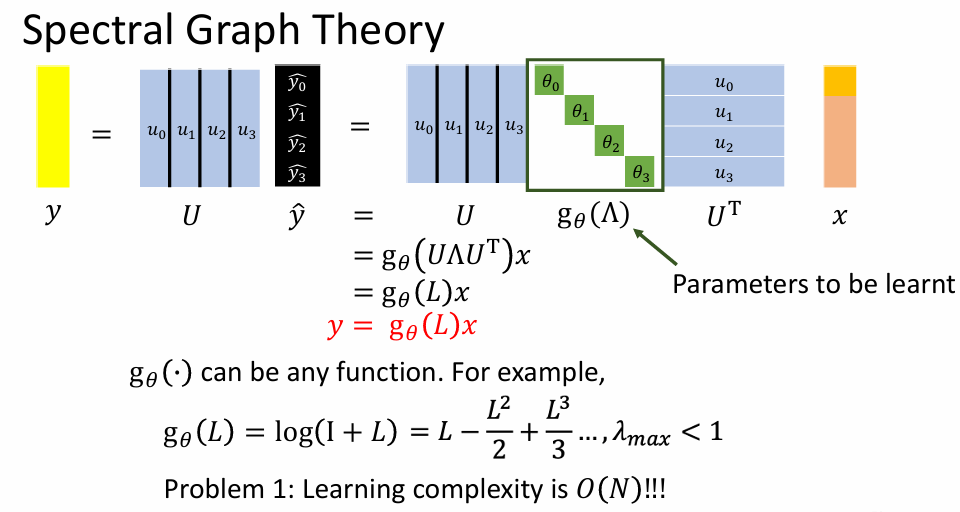
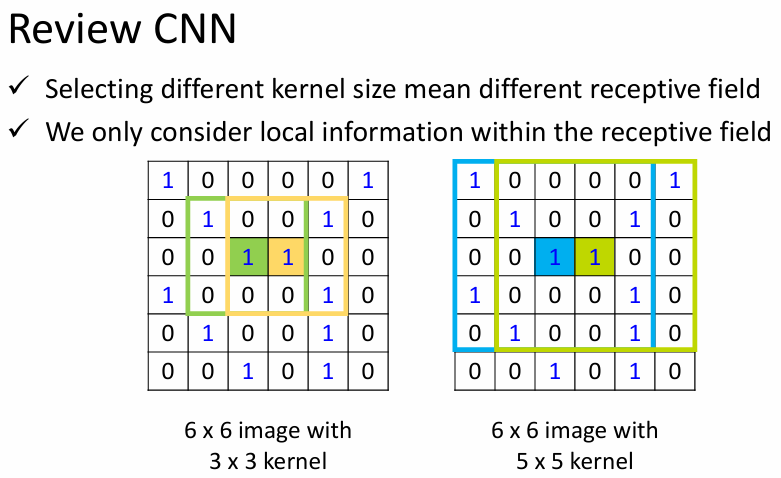
- 图谱理论中过滤函数(频率反应)的选择------问题 1:学习复杂度与输入长度线性相关
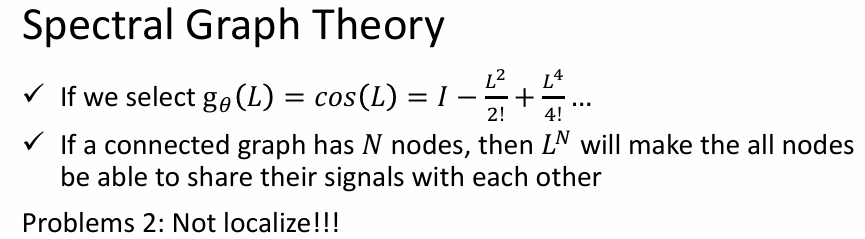
- 图谱理论中过滤函数(频率反应)的选择------问题 2:信号卷积过程非 localize(即聚合了其他非相关节点)
ChebNet------Chebyshev 多项式递归
- 针对问题 1、2 的解决方案------多项式参数
只用学多项式函数的系数就可以了。
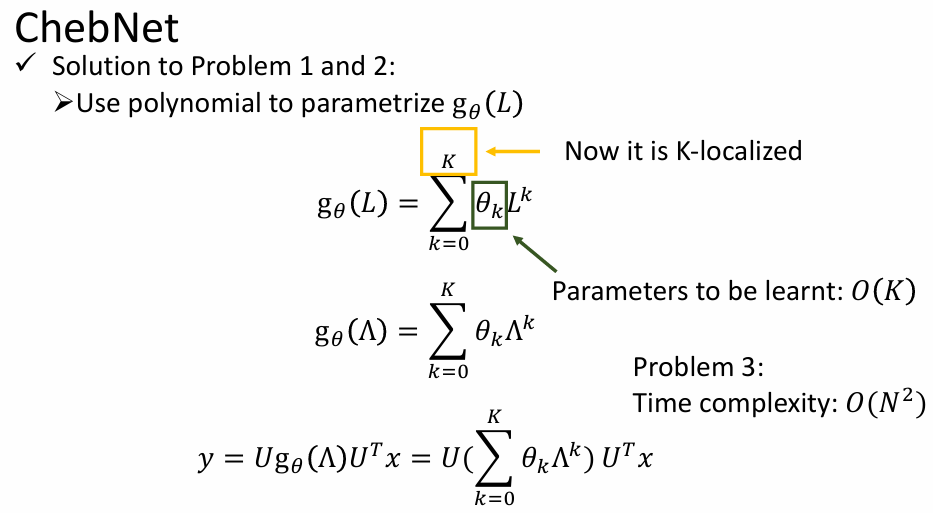
出现问题 3:时间复杂度为 O ( N 2 ) O(N^2) O(N2)
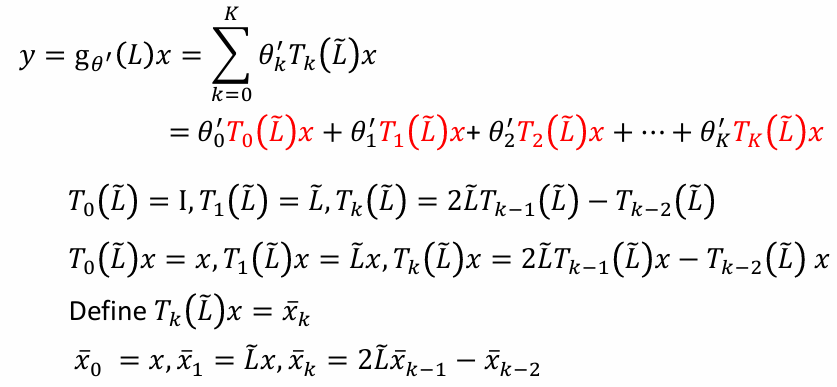
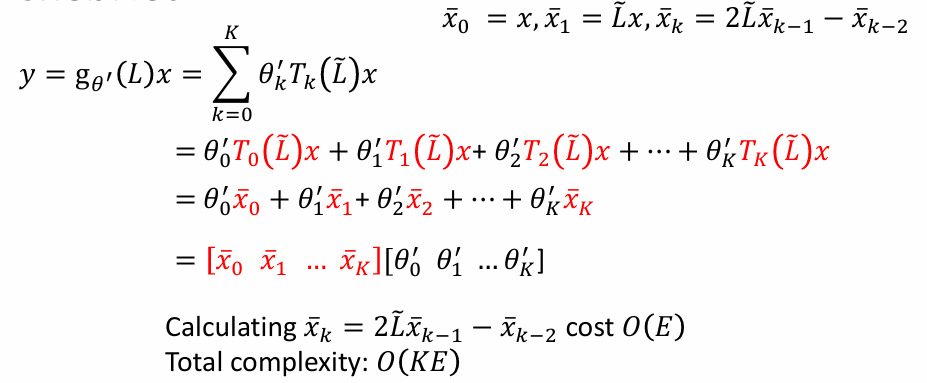
- 针对问题 3 的解决方案------Chebyshev 多项式
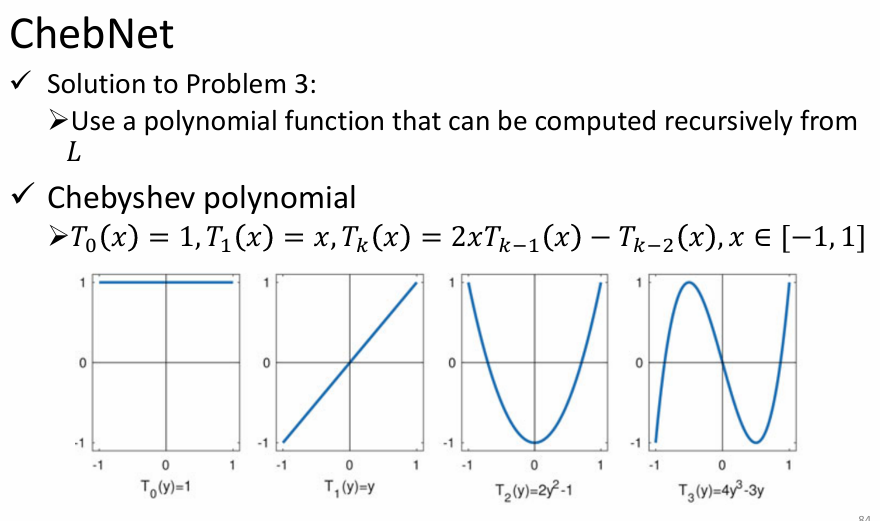
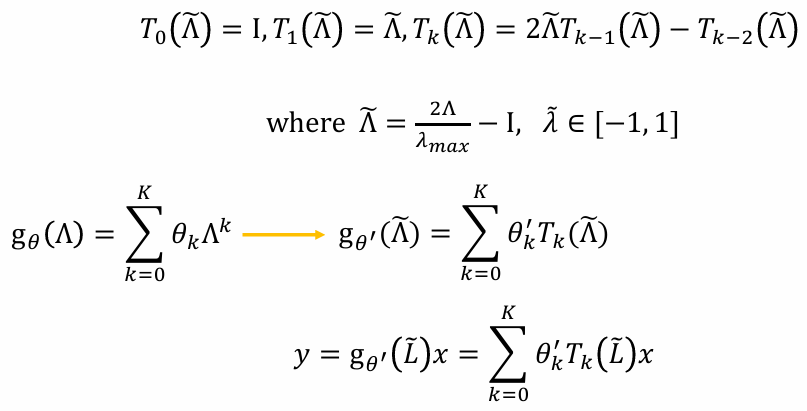
- 可以递归的多项式的好处是什么呢?
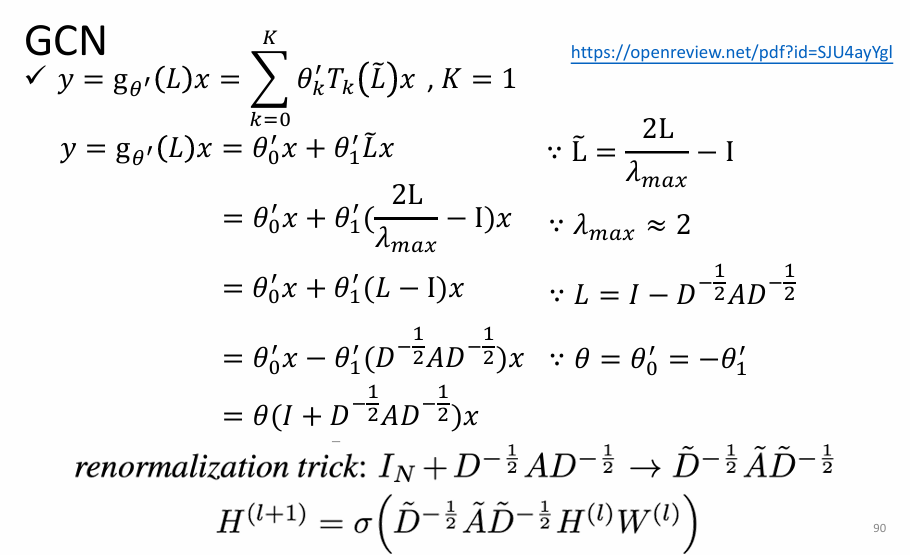
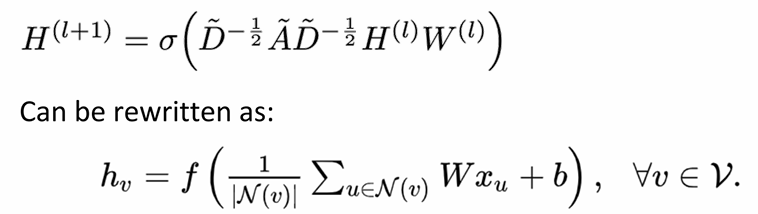
GCN------renormalization trick
SSM/S4/HiPPO/Mamba
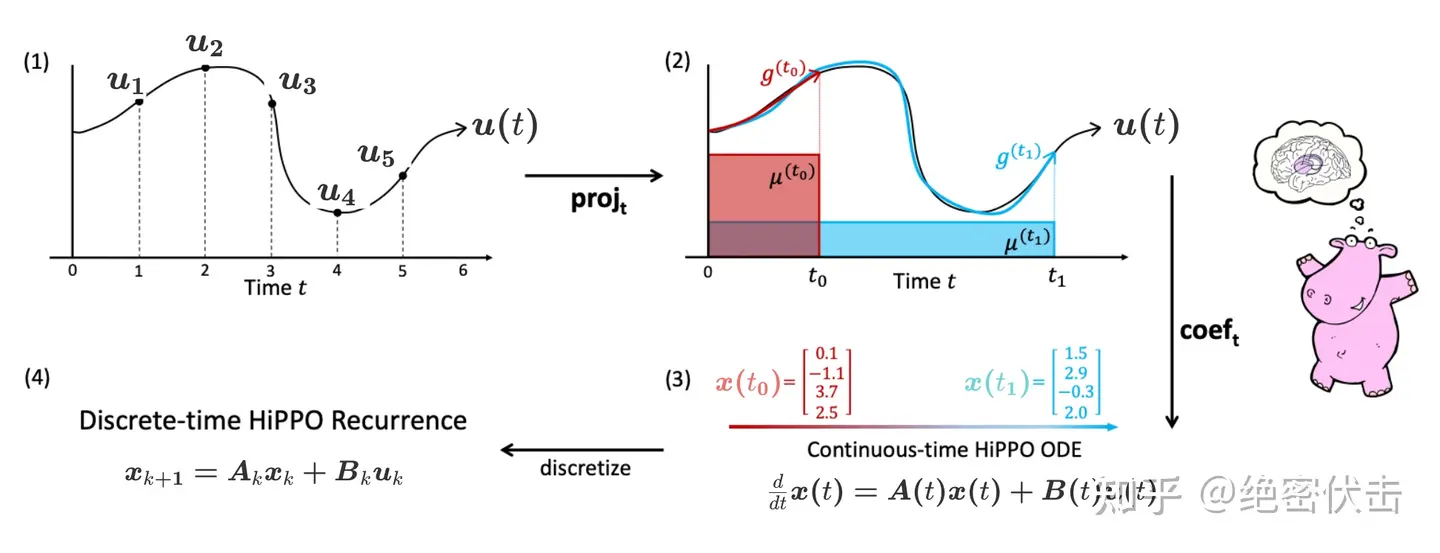
为了彻底理解 Mamba 的底层逻辑,将这个过程拆解为四个阶段:函数逼近(投影) → \to →微分方程推导(HiPPO) → \to →离散化(SSM) → \to →选择性参数化(Mamba)。
第一阶段:投影与系数提取
目标 :将一段连续的历史函数 f ( τ ) f(\tau) f(τ)(其中 τ ≤ t \tau \le t τ≤t),压缩成一个有限维的向量 c ( t ) c(t) c(t)。
定义测度*(Measure)*与空间
Mamba (基于 HiPPO-LegS) 关心的是过去 0 , t 0, t 0,t 窗口内的所有信息,且权重相等。我们定义缩放勒让德测度 (Scaled Legendre Measure, LegS):
μ ( t ) ( x ) = 1 t I 0 , t ( x ) \mu^{(t)}(x) = \frac{1}{t} \mathbb{I}_{0, t}(x) μ(t)(x)=t1I0,t(x)
- 这表示在区间 0 , t 0, t 0,t 上是均匀分布,密度为 1 / t 1/t 1/t。
定义基底*(Basis)*
在这个测度下,我们要寻找一组正交多项式基底 P n ( t ) ( x ) P_n^{(t)}(x) Pn(t)(x)。数学上对应的就是移位勒让德多项式*(Shifted Legendre Polynomials)*。
它们满足正交性:
⟨ P n ( t ) , P m ( t ) ⟩ μ ( t ) = ∫ 0 t P n ( t ) ( x ) P m ( t ) ( x ) 1 t d x = δ n m \langle P_n^{(t)}, P_m^{(t)} \rangle_{\mu^{(t)}} = \int_0^t P_n^{(t)}(x) P_m^{(t)}(x) \frac{1}{t} dx = \delta_{nm} ⟨Pn(t),Pm(t)⟩μ(t)=∫0tPn(t)(x)Pm(t)(x)t1dx=δnm
这里的 δ n m \delta_{nm} δnm是数学中一个非常著名的符号,叫做 克罗内克 δ \delta δ 函数 _(Kronecker Delta)_。
它的定义非常简单,就是一个**"二值开关"**:
δ n m = { 1 如果 n = m 0 如果 n ≠ m \delta_{nm} = \begin{cases} 1 & \text{如果 } n = m \\ 0 & \text{如果 } n \neq m \end{cases} δnm={10如果 n=m如果 n=m
在这个积分公式中,它代表了基函数 P n ( t ) P_n^{(t)} Pn(t)和 P m ( t ) P_m^{(t)} Pm(t)之间的正交归一性。
最优系数提取*(Projection)*
要在时刻 t t t 用一个多项式 g ( t ) ( x ) g^{(t)}(x) g(t)(x) 去逼近历史 f ( x ) f(x) f(x),使得误差 ∫ 0 t ∣ f ( x ) − g ( t ) ( x ) ∣ 2 d μ \int_0^t |f(x) - g^{(t)}(x)|^2 d\mu ∫0t∣f(x)−g(t)(x)∣2dμ 最小。
根据希尔伯特空间投影定理,最优系数 c n ( t ) c_n(t) cn(t) 就是 f ( x ) f(x) f(x) 在基底上的内积:
c n ( t ) = ∫ 0 t f ( x ) P n ( x t ) 1 t d x \boxed{ c_n(t) = \int_0^t f(x) P_n\left(\frac{x}{t}\right) \frac{1}{t} dx } cn(t)=∫0tf(x)Pn(tx)t1dx
- c ( t ) ∈ R N c(t) \in \mathbb{R}^N c(t)∈RN 就是隐藏状态 (Hidden State) ,即 h ( t ) h(t) h(t)。
- 这个公式不仅提取了系数,还定义了 h ( t ) h(t) h(t) 的物理含义:积分 ∫ \int ∫就是计算"内积"或"相关性"。它在问:"信号 f ( x ) f(x) f(x) 和多项式 P n ( x t ) 1 t P_n\left(\frac{x}{t}\right) \frac{1}{t} Pn(tx)t1 有多像?"
这个和傅里叶变换公式超级像!就是"广义傅里叶变换"
第二阶段:最优系数的动态变化
目标 :每次一个输入进来,我们不能每一步都重新算上面那个积分。我们需要找到 c ˙ ( t ) \dot{c}(t) c˙(t)(系数随时间变化的导数),从而得到微分方程。
对系数求导
对 c n ( t ) c_n(t) cn(t) 关于 t t t 求导,利用莱布尼茨积分法则:
d d t c n ( t ) = d d t ∫ 0 t 1 t f ( x ) P n ( x t ) d x \frac{d}{dt} c_n(t) = \frac{d}{dt} \int_0^t \frac{1}{t} f(x) P_n\left(\frac{x}{t}\right) dx dtdcn(t)=dtd∫0tt1f(x)Pn(tx)dx
求导结果会分裂为两项:边界项 (新数据)和积分内部求导项(旧记忆维护)。
c ˙ n ( t ) = 1 t f ( t ) P n ( 1 ) ⏟ 边界项 (Term 1) + ∫ 0 t f ( x ) ∂ ∂ t 1 t P n ( x t ) d x ⏟ 内部变化项 (Term 2) \dot{c}n(t) = \underbrace{\frac{1}{t} f(t) P_n(1)}{\text{边界项 (Term 1)}} + \underbrace{\int_0^t f(x) \frac{\partial}{\partial t} \left \\frac{1}{t} P_n\\left(\\frac{x}{t}\\right) \\right dx}_{\text{内部变化项 (Term 2)}} c˙n(t)=边界项 (Term 1) t1f(t)Pn(1)+内部变化项 (Term 2) ∫0tf(x)∂t∂t1Pn(tx)dx
推导矩阵 B (边界项)
- Term 1 代表当前时刻 x = t x=t x=t 的输入。
- 代入 P n ( 1 ) P_n(1) Pn(1) 的性质(勒让德多项式在端点的值): P n ( 1 ) = 2 n + 1 P_n(1) = \sqrt{2n+1} Pn(1)=2n+1 (归一化后)。
- 这就是矩阵 B B B 的来源:
B n = 2 n + 1 B_n = \sqrt{2n+1} Bn=2n+1
推导矩阵 A (内部变化项)
我们需要计算 ∂ ∂ t 1 t P n ( x t ) \frac{\partial}{\partial t} \\frac{1}{t} P_n(\\frac{x}{t}) ∂t∂t1Pn(tx)。利用勒让德多项式的导数性质: ( 2 n + 1 ) P n ( x ) = d d x P n + 1 ( x ) − P n − 1 ( x ) (2n+1)P_n(x) = \frac{d}{dx}P_{n+1}(x) - P_{n-1}(x) (2n+1)Pn(x)=dxdPn+1(x)−Pn−1(x) 以及递归关系。经过一系列推导,会发现导数项可以被完美地表示为低阶多项式系数的线性组合:
Term 2 = − 1 t ∑ k = 0 n A n k c k ( t ) \text{Term 2} = -\frac{1}{t} \sum_{k=0}^{n} A_{nk} c_k(t) Term 2=−t1∑k=0nAnkck(t)
其中 A A A 是一个特定的下三角矩阵(HiPPO Matrix):

连续时间微分方程 (ODE)
将上述两部分合并,我们得到了完美的连续时间状态方程:
c ˙ ( t ) = 1 t A c ( t ) + B f ( t ) \boxed{ \dot{c}(t) = \frac{1}{t} A c(t) + B f(t) } c˙(t)=t1Ac(t)+Bf(t)
这就是 HiPPO 赋予 Mamba 的**"数学骨架"** 。它保证了无论 t t t 怎么变, c ( t ) c(t) c(t) 永远是最优逼近系数。
第三阶段:离散化 (Discretization)
目标 :计算机是离散的,我们需要把连续的 h ˙ = A h + B x \dot{h} = Ah + Bx h˙=Ah+Bx 变成递归公式 h t = A ˉ h t − 1 + B ˉ x t h_t = \bar{A} h_{t-1} + \bar{B} x_t ht=Aˉht−1+Bˉxt。我们使用 零阶保持 (Zero-Order Hold, ZOH) 假设:假设在时间步长 Δ \Delta Δ 内,输入 x ( t ) x(t) x(t) 保持不变。
积分求解
在区间 t , t + Δ t, t+\\Delta t,t+Δ 上求解微分方程:
h ( t + Δ ) = e Δ A h ( t ) + ∫ t t + Δ e ( t + Δ − τ ) A B x ( τ ) d τ h(t+\Delta) = e^{\Delta A} h(t) + \int_t^{t+\Delta} e^{(t+\Delta-\tau)A} B x(\tau) d\tau h(t+Δ)=eΔAh(t)+∫tt+Δe(t+Δ−τ)ABx(τ)dτ
2. 导出离散参数
由于假设 x ( τ ) x(\tau) x(τ) 在该区间是常数 x k x_k xk,可以提取出来:
- 状态转移矩阵 A ˉ \bar{A} Aˉ:
A ˉ = exp ( Δ A ) \bar{A} = \exp(\Delta A) Aˉ=exp(ΔA)
- 输入矩阵 B ˉ \bar{B} Bˉ:
B ˉ = ( ∫ 0 Δ e τ A d τ ) B = A − 1 ( e Δ A − I ) B \bar{B} = \left( \int_0^\Delta e^{\tau A} d\tau \right) B = A^{-1} (e^{\Delta A} - I) B Bˉ=(∫0ΔeτAdτ)B=A−1(eΔA−I)B
最终得到 SSM 的标准递归形式:
h t = A ˉ h t − 1 + B ˉ x t \boxed{ h_t = \bar{A} h_{t-1} + \bar{B} x_t } ht=Aˉht−1+Bˉxt
第四阶段:Mamba 的选择性
目标:打破 S4 的线性时不变(LTI)限制,让参数随输入变化。
静态 vs 动态
- S4 (静态): Δ , B , C \Delta, B, C Δ,B,C 对所有时刻 t t t 都是固定的常数。
h t = A ˉ h t − 1 + B ˉ x t h_t = \bar{A} h_{t-1} + \bar{B} x_t ht=Aˉht−1+Bˉxt
(这里的 A ˉ , B ˉ \bar{A}, \bar{B} Aˉ,Bˉ 永远不变)
- Mamba (动态) : 参数由当前输入 x t x_t xt 生成。
参数生成公式
Δ t = Softplus ( Parameter + Linear Δ ( x t ) ) B t = Linear B ( x t ) C t = Linear C ( x t ) \begin{aligned} \Delta_t &= \text{Softplus}(\text{Parameter} + \text{Linear}{\Delta}(x_t)) \\ B_t &= \text{Linear}{B}(x_t) \\ C_t &= \text{Linear}_{C}(x_t) \end{aligned} ΔtBtCt=Softplus(Parameter+LinearΔ(xt))=LinearB(xt)=LinearC(xt)
动态离散化
因为 Δ t \Delta_t Δt 变了,每一步的离散化矩阵 A ˉ \bar{A} Aˉ 和 B ˉ \bar{B} Bˉ 都在变!
A ˉ t = exp ( Δ t A ) B ˉ t = ( Δ t A ) − 1 ( exp ( Δ t A ) − I ) ⋅ Δ t B t \begin{aligned} \bar{A}_t &= \exp(\Delta_t A) \\ \bar{B}_t &= (\Delta_t A)^{-1} (\exp(\Delta_t A) - I) \cdot \Delta_t B_t \end{aligned} AˉtBˉt=exp(ΔtA)=(ΔtA)−1(exp(ΔtA)−I)⋅ΔtBt
4. 最终 Mamba 工作流
h t = A ˉ t h t − 1 + B ˉ t x t \boxed{ h_t = \bar{A}t h{t-1} + \bar{B}_t x_t } ht=Aˉtht−1+Bˉtxt
y t = C t h t \boxed{ y_t = C_t h_t } yt=Ctht
总结:从数学到代码
- 投影 :告诉我们需要 HiPPO 矩阵 A ,这定义了 h ( t ) h(t) h(t) 是"记忆压缩系数"。
- 微分 :推导出了 h ˙ = A h + B x \dot{h} = Ah + Bx h˙=Ah+Bx 的形式,这使得我们可以用状态空间来维护这个记忆。
- 离散化 :引入了 Δ \Delta Δ,将微分方程变成了计算机能跑的递归 A ˉ , B ˉ \bar{A}, \bar{B} Aˉ,Bˉ。
- Mamba :让 Δ \Delta Δ随输入变化 。
- 当 Δ t → 0 \Delta_t \to 0 Δt→0, A ˉ t → I \bar{A}_t \to I Aˉt→I(单位矩阵), B ˉ t → 0 \bar{B}_t \to 0 Bˉt→0 ⟹ \implies ⟹保持记忆,忽略输入。
- 当 Δ t → ∞ \Delta_t \to \infty Δt→∞, A ˉ t → 0 \bar{A}_t \to 0 Aˉt→0, B ˉ t → large \bar{B}_t \to \text{large} Bˉt→large ⟹ \implies ⟹遗忘历史,强力写入。
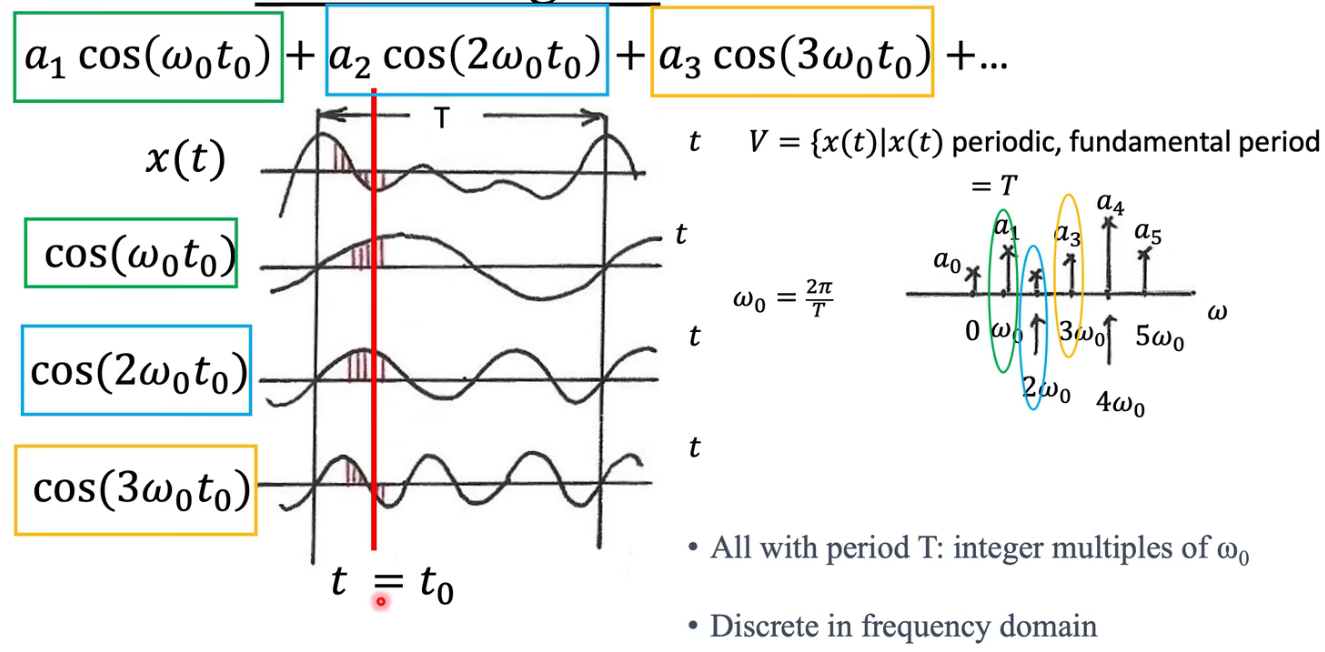
GCN 与 SSM/Mamba 的相似性
要理解架构的本质联系,我们必须看它们是如何定义**"空间",以及在这个空间上使用什么样的"算子"和"基底"**来分解和处理信息。
经典傅里叶变换
-
F ( ω ) = ∫ − ∞ ∞ f ( t ) e − i ω t d t F(\omega) = \int_{-\infty}^{\infty} f(t) e^{-i\omega t} \, dt F(ω)=∫−∞∞f(t)e−iωtdt
-
-
f ( t ) = 1 2 π ∫ − ∞ ∞ F ( ω ) e i ω t d ω f(t) = \frac{1}{2\pi} \int_{-\infty}^{\infty} F(\omega) e^{i\omega t} \, d\omega f(t)=2π1∫−∞∞F(ω)eiωtdω
- 物理场景:连续的欧几里得空间(比如一根无限长的直线,或者时间轴)。
- 基函数 : 正弦波 e − i ω t e^{-i\omega t} e−iωt。
- 为什么选正弦波?
- 因为正弦波是微分算子的特征函数!
- d 2 d t 2 ( e − i ω t ) = − ω 2 e − i ω t \frac{d^2}{dt^2}(e^{-i\omega t}) = -\omega^2 e^{-i\omega t} dt2d2(e−iωt)=−ω2e−iωt。
- 对它求导两次,它变回了自己,只多了一个常数 − ω 2 -\omega^2 −ω2(特征值)。这意味着在求导运算(LTI 系统基础)下,正弦波是最稳定的基底,可以把微积分变成简单的乘法。
- 因为正弦波是微分算子的特征函数!
图傅里叶变换
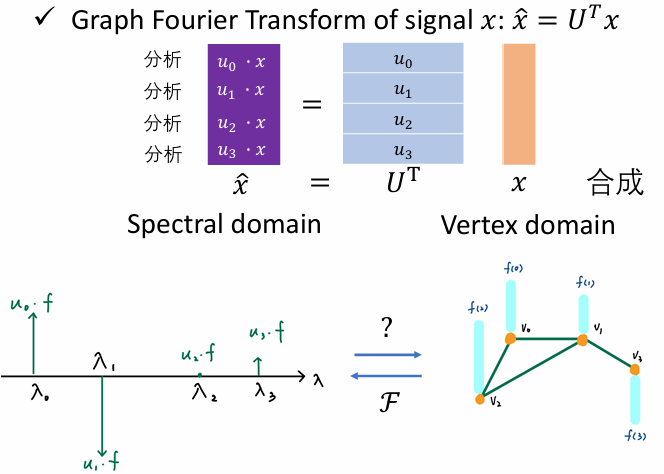
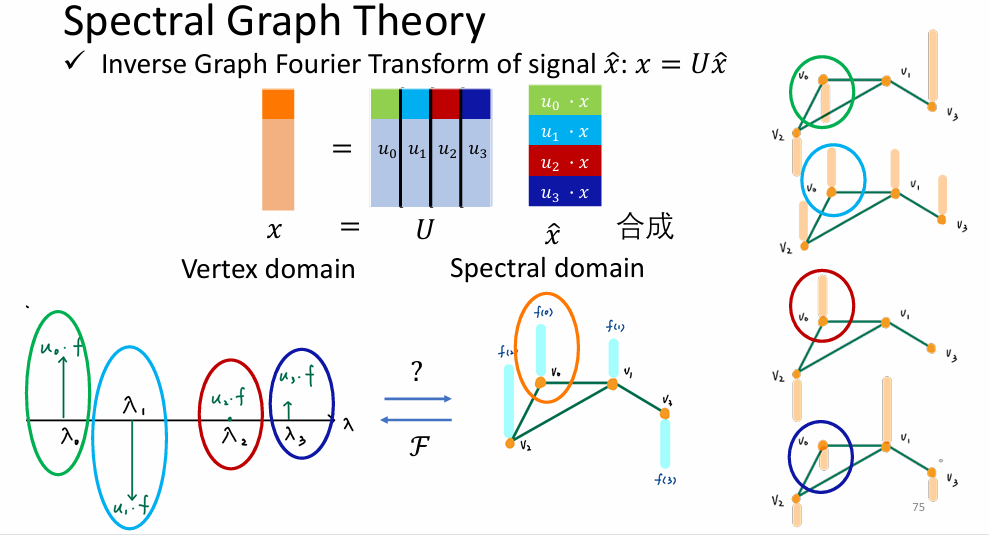
- 物理场景:离散的非欧几里得空间(比如社交网络,节点是人,边是关系)。没有连续的"上下左右",只有拓扑连接。
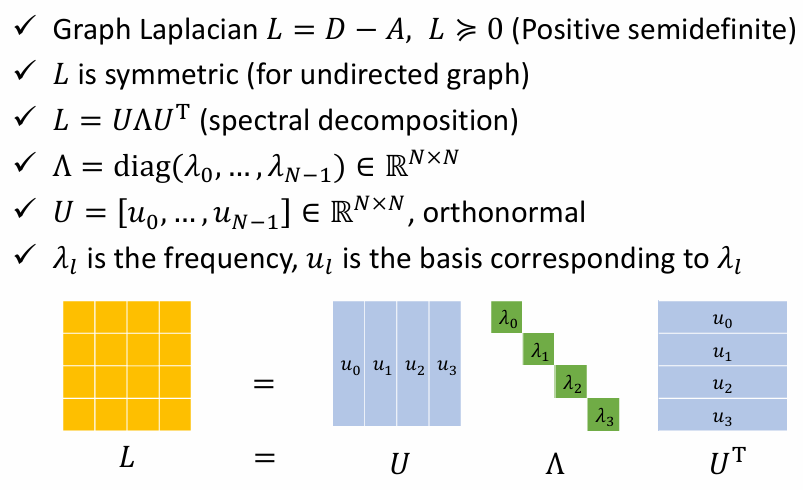
- 基函数 : 矩阵 L L L 的特征向量 (Eigenvectors, U U U)。
- 为什么选这些向量?
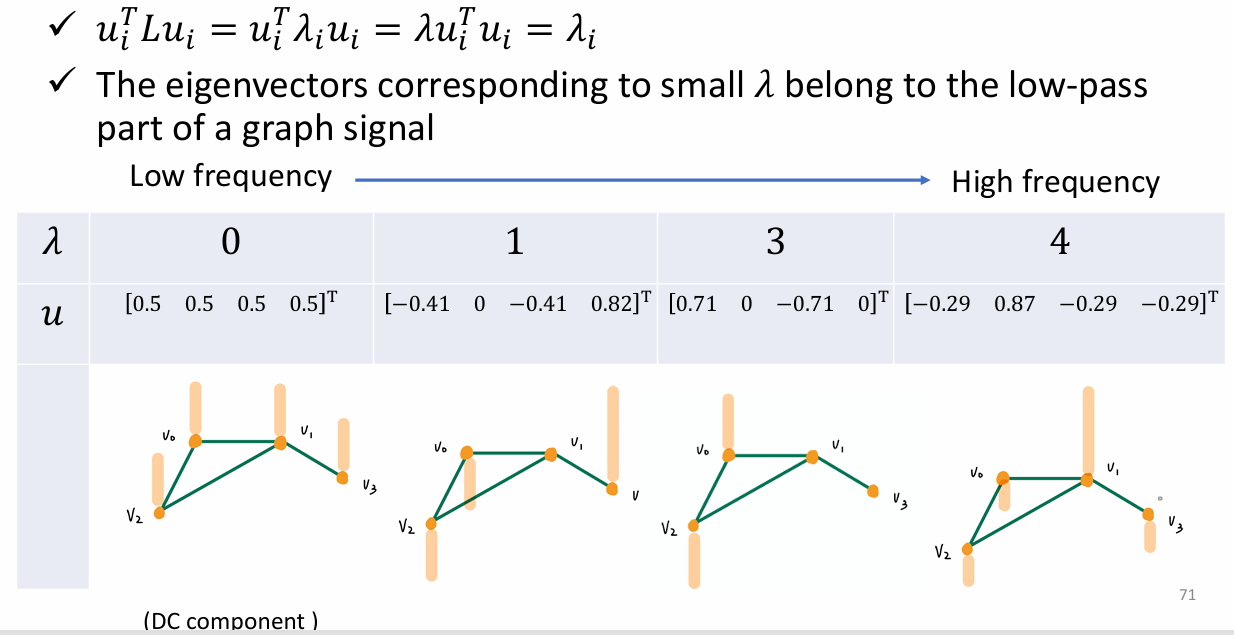
- 因为 L u l = λ l u l L u_l = \lambda_l u_l Lul=λlul。
- 这些特征向量 u l u_l ul 代表了图上的"驻波"模式。
- λ l \lambda_l λl(特征值)越小,代表这个向量在图上变化越平缓(低频,平滑信号); λ l \lambda_l λl 越大,代表相邻节点差异剧烈(高频,噪声或边缘)。这是在不规则拓扑上定义**"频率"**的数学方式。
Mamba / HiPPO (State Space Models)
h n ( t ) = ∫ 0 t f ( x ) P n ( x t ) 1 t d x \boxed{ h_n(t) = \int_0^t f(x) P_n\left(\frac{x}{t}\right) \frac{1}{t} dx } hn(t)=∫0tf(x)Pn(tx)t1dx
h t = A ˉ h t − 1 + B ˉ x t \boxed{ h_t = \bar{A} h_{t-1} + \bar{B} x_t } ht=Aˉht−1+Bˉxt
f ( x ) ≈ ∑ n = 0 N − 1 h n ( t ) ⋅ P n ( x t ) ⋅ ( 2 n + 1 ) \boxed{ f(x) \approx \sum_{n=0}^{N-1} h_n(t) \cdot P_n\left(\frac{x}{t}\right) \cdot (2n+1) } f(x)≈n=0∑N−1hn(t)⋅Pn(tx)⋅(2n+1)
y t = C t h t \boxed{ y_t = C_t h_t } yt=Ctht
(注:具体的常数因子 ( 2 n + 1 ) (2n+1) (2n+1)取决于勒让德多项式的具体归一化定义,但核心思想是加权求和)
- 物理场景:在线的流式历史空间。时间不断推移,我们需要把无限的过去压缩进有限的"状态"中。
- 基函数 : 正交多项式(主要是勒让德多项式 P n ( t ) ( x ) P_n^{(t)}(x) Pn(t)(x))。
- 为什么选多项式?
- 因为它们是关于度量 μ ( t ) \mu(t) μ(t)(如 1 / t 1/t 1/t)正交的。
- 这种正交性允许我们通过一个简单的线性递推公式(也就是 Mamba 的核心 h ˙ = A h + B x \dot{h} = Ah + Bx h˙=Ah+Bx)来实时更新系数,而不需要重新计算整个历史的积分。
- 矩阵 A A A 本质上就是**"多项式基底在时间拉伸下的导数变换矩阵"**。它保证了我们始终在用一组最优的基底去逼近历史曲线。
Transformer (Self-Attention)
- 物理场景 :语义关系空间(Semantic Space)。序列中的每个 Token 都可以看作一个节点,它们之间构成了一个全连接图,但边的权重是动态的。
- 基函数: 动态的、输入相关的基底。
- 为什么选这种机制?
- 与前三者不同,Transformer 不使用固定的正弦波、固定的图特征向量或固定的多项式。
- 它通过 Q Q Q(查询)和 K K K(键)的内积,现场学习出一组基底(关注点)。
- "语义共鸣" :如果 Token A 和 Token B 的语义相似( q A ⋅ k B q_A \cdot k_B qA⋅kB 大),它们就形成强连接。这相当于针对每一个具体的输入句子,现场构建了一个最适合该句子的"图傅里叶变换",去提取特征。
RNN
- 物理场景 :离散的时间序列。每一步是一个离散的时刻 t t t。
- 基底类型 :隐式的、由权重矩阵 W W W决定的特征向量。
- 为什么选这种机制?(以及它的痛点)
- 机制 :RNN 试图通过不断乘以矩阵 W W W 来把过去的信息"传递"到未来。这相当于把信息投影在 W W W 的特征向量上进行演化。
- 痛点(梯度消失/爆炸) :
- 因为 W W W 是一个普通的、可学习的矩阵,它的特征值 λ \lambda λ 不受数学约束。
- 随着时间 t t t 推移,历史信息实际上被乘以了 W t W^t Wt(矩阵的 t t t 次方)。
- 如果特征值 ∣ λ ∣ < 1 |\lambda| < 1 ∣λ∣<1,基底衰减,记忆消失;
- 如果特征值 ∣ λ ∣ > 1 |\lambda| > 1 ∣λ∣>1,基底膨胀,记忆爆炸。
- 对比 Mamba :Mamba (HiPPO) 实际上就是手动设计了一个完美的 W W W矩阵(即离散化后的 A ˉ \bar{A} Aˉ**)** ,强行保证了其特征值的数学性质能完美保留长记忆,而不是让神经网络自己去"瞎猜"一个 W W W。