间接平差的精度评定详解
一、精度评定的目的与意义
精度评定是间接平差的必要组成部分,它回答了平差后最核心的两个问题:
-
观测数据的质量如何? → 通过单位权中误差评估
-
参数估计的可信度有多高? → 通过参数的方差-协方差阵评估
在AGNSS中,精度评定决定了定位结果能否用于导航、测绘等高精度应用。
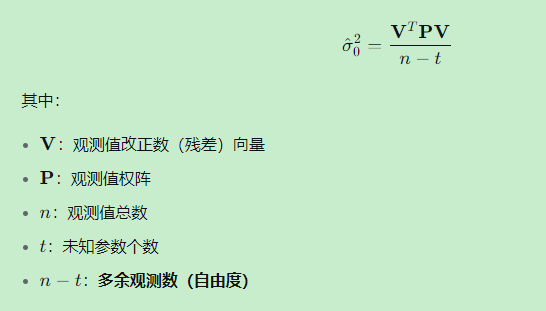
二、单位权中误差评定
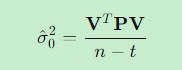
2.1 单位权方差估值公式
2.2 单位权中误差
2.3 物理意义
-
 是权为1的观测值的中误差估计值
是权为1的观测值的中误差估计值 -
反映了观测系列的整体质量
-
是所有后续精度评定的基准缩放因子
2.4 统计性质
在观测误差服从正态分布且定权正确的假设下:
2.5 AGNSS中的实际意义
在GNSS定位中:
-
若
 远大于预期值(如1m),可能表明:
远大于预期值(如1m),可能表明:-
观测条件差(多路径、电离层扰动)
-
有未发现的粗差或周跳
-
数学模型不完善
-
-
若
 远小于预期值,可能表明:
远小于预期值,可能表明:-
观测质量异常好
-
自由度计算错误
-
权阵设定不当
-
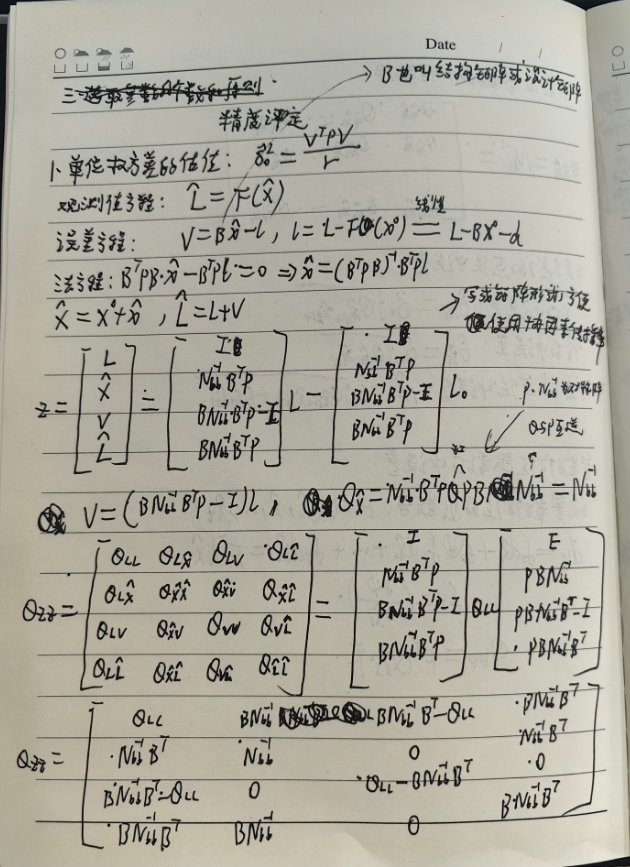
三、参数估值的精度评定
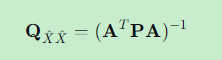
3.1 参数估值的协因数阵
这是精度评定的核心结果:
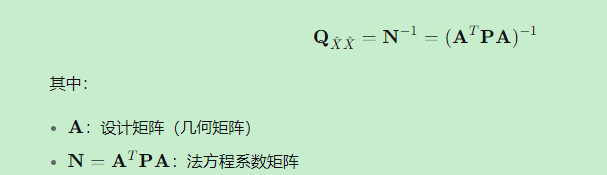
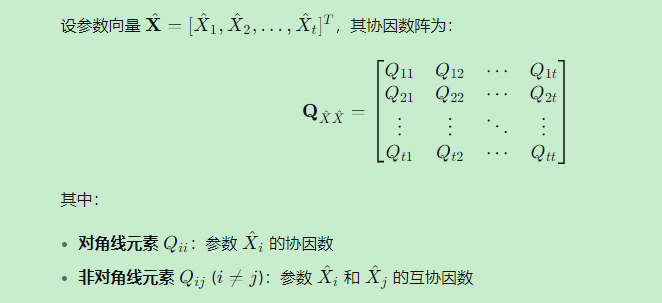
3.2 协因数阵的构成
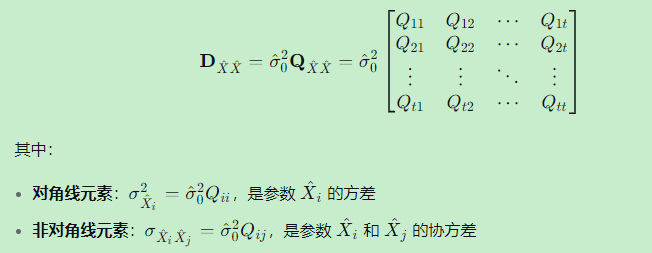
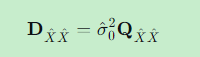
3.3 参数估值的方差-协方差阵
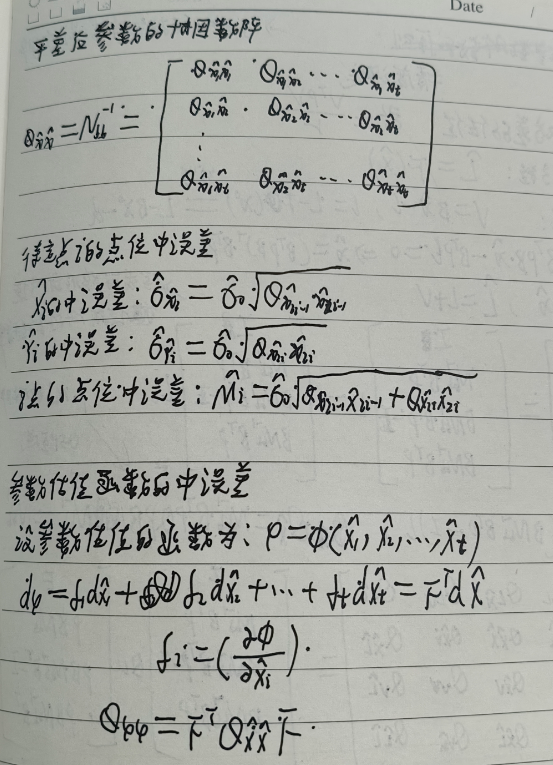
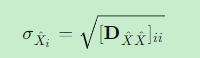
3.4 参数估值的中误差
第 i个参数的中误差为:
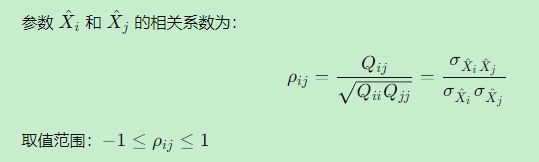
3.5 参数间的相关系数
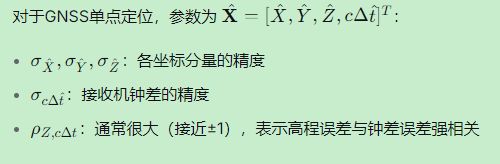
3.6 在GNSS定位中的应用
四、观测值平差值的精度评定
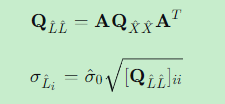
4.1 观测值平差值的协因数阵
4.2 方差-协方差阵
4.3 第 ii 个平差值的中误差
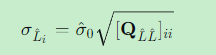
4.4 与改正数中误差的关系
可以证明:
即:平差值方差 + 改正数方差 = 观测值方差
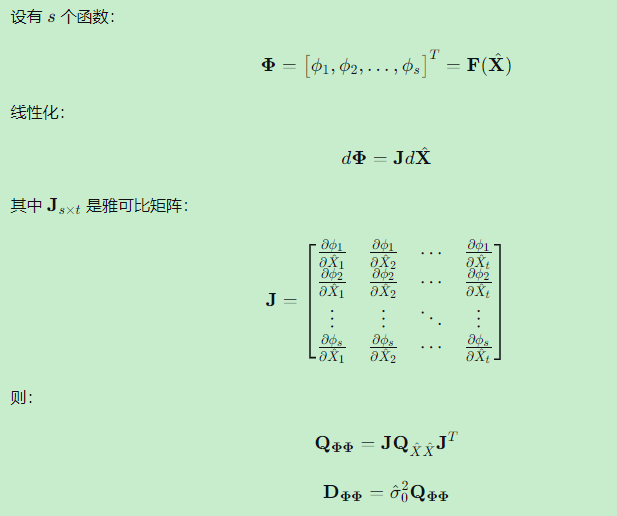
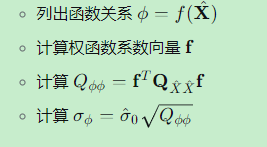
五、参数函数的精度评定
5.1 一般函数形式
在实际应用中,我们关心的往往是参数的函数:

示例:
-
从直角坐标 (X, Y, Z)计算大地坐标 (B, L, H)
-
计算两点间的距离
-
计算方位角或高度角
5.2 线性化与权函数式
称为权函数系数向量。
5.3 函数 ϕ 的协因数
应用协因数传播律:
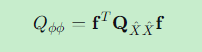
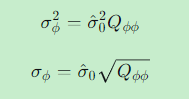
5.4 函数 ϕ 的方差和中误差
5.5 多个参数函数的协因数阵
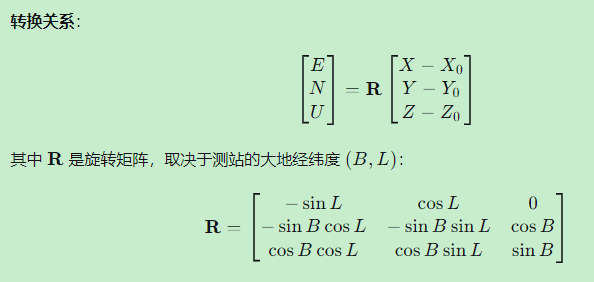
六、AGNSS中的关键应用:从XYZ到ENU的精度转换
6.1 坐标转换函数
在GNSS中,我们通常需要将地心地固坐标系(ECEF)下的精度转换到当地站心坐标系(ENU)。
转换关系:
6.2 精度传播计算

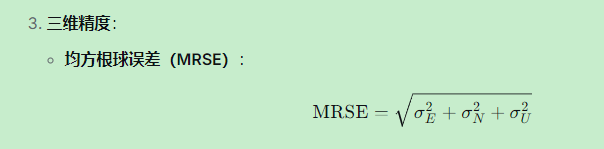
6.3 提取常用精度指标
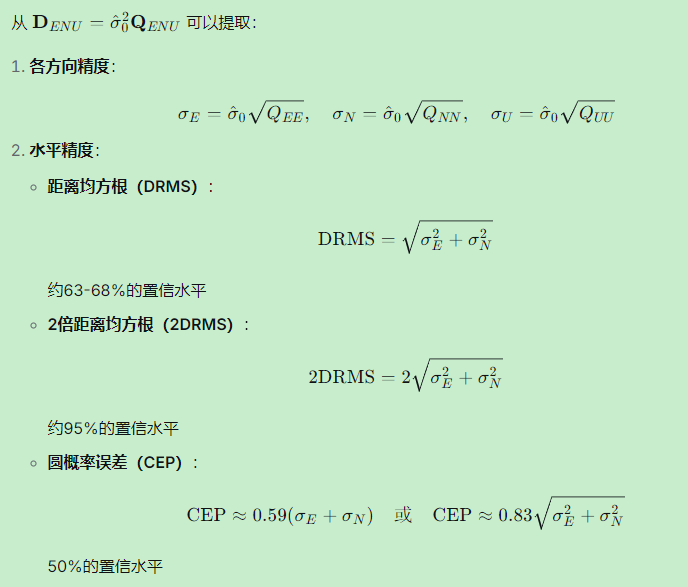
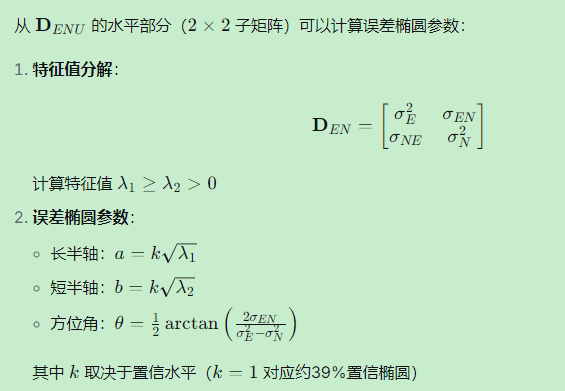
6.4 误差椭圆(水平精度分布)
七、精度评定的完整流程
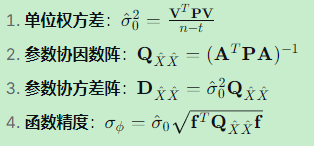
7.1 计算步骤
-
计算单位权方差:
-
计算参数协因数阵:
-
计算参数协方差阵:
-
提取参数精度:
-
计算平差值精度(如需):
-
计算参数函数的精度:
7.2 AGNSS中的实际计算
def indirect_adjustment_precision(A, P, V, X_hat):
"""
间接平差精度评定函数
"""
n, t = A.shape
# 1. 单位权方差
sigma0_sq = (V.T @ P @ V) / (n - t)
sigma0 = np.sqrt(sigma0_sq)
# 2. 参数协因数阵和协方差阵
N = A.T @ P @ A
Q_XX = np.linalg.inv(N)
D_XX = sigma0_sq * Q_XX
# 3. 参数中误差
sigma_X = np.sqrt(np.diag(D_XX))
# 4. 坐标转换到ENU(示例)
# 假设XYZ是前3个参数
Q_XYZ = Q_XX[:3, :3]
# 旋转矩阵(假设已知测站经纬度)
lat = np.radians(30) # 纬度30度
lon = np.radians(120) # 经度120度
R = np.array([
[-np.sin(lon), np.cos(lon), 0],
[-np.sin(lat)*np.cos(lon), -np.sin(lat)*np.sin(lon), np.cos(lat)],
[np.cos(lat)*np.cos(lon), np.cos(lat)*np.sin(lon), np.sin(lat)]
])
# ENU协因数阵和协方差阵
Q_ENU = R @ Q_XYZ @ R.T
D_ENU = sigma0_sq * Q_ENU
# 5. 提取水平精度指标
sigma_E = np.sqrt(D_ENU[0, 0])
sigma_N = np.sqrt(D_ENU[1, 1])
sigma_U = np.sqrt(D_ENU[2, 2])
# 水平精度指标
DRMS = np.sqrt(sigma_E**2 + sigma_N**2)
CEP = 0.59 * (sigma_E + sigma_N) # 近似公式
# 6. 误差椭圆参数
D_EN = D_ENU[:2, :2]
eigenvalues, eigenvectors = np.linalg.eig(D_EN)
idx = eigenvalues.argsort()[::-1]
lambda1, lambda2 = eigenvalues[idx]
# k=1对应约39%置信椭圆,k=2.15对应95%置信椭圆
k = 2.15 # 95%置信水平
a = k * np.sqrt(lambda1) # 长半轴
b = k * np.sqrt(lambda2) # 短半轴
# 椭圆方位角(从北顺时针)
theta_rad = 0.5 * np.arctan2(2*D_ENU[0,1], D_ENU[0,0]-D_ENU[1,1])
theta_deg = np.degrees(theta_rad)
return {
'sigma0': sigma0,
'sigma_X': sigma_X,
'D_XX': D_XX,
'sigma_E': sigma_E,
'sigma_N': sigma_N,
'sigma_U': sigma_U,
'DRMS': DRMS,
'CEP': CEP,
'error_ellipse': {
'major_axis': a,
'minor_axis': b,
'orientation': theta_deg
}
}八、精度评定的统计检验
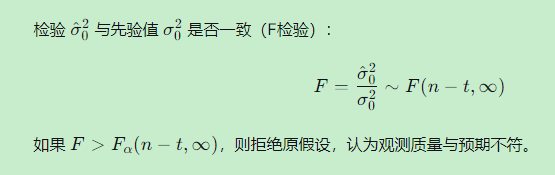
8.1 单位权方差的检验
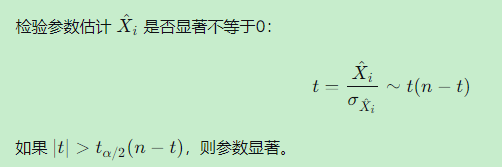
8.2 参数显著性的检验(t检验)
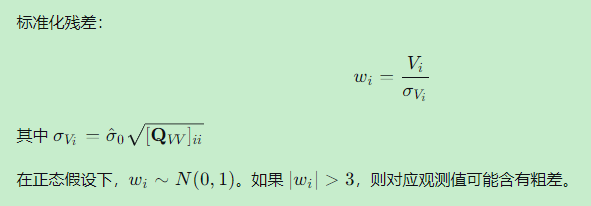
8.3 粗差检测(数据探测)
九、精度评定的影响因素
9.1 观测值精度(权阵)
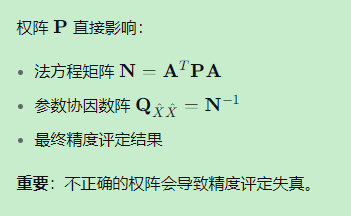
重要:不正确的权阵会导致精度评定失真。
9.2 几何构型(设计矩阵)
设计矩阵 A 的构成影响:
-
观测几何:卫星分布对GNSS定位精度的影响
-
可观测性:某些参数可能不可单独估计(秩亏)
-
相关性:参数间的强相关会增大不确定性椭球
9.3 多余观测数
自由度 n−t 影响:
-
单位权方差的可靠性
-
统计检验的效力
-
总体精度评定的可信度
十、总结
10.1 精度评定的核心地位
精度评定不是平差的"附加产品",而是平差结果的必要组成部分。没有精度评定的平差结果是不可用的。
10.2 关键公式回顾
10.3 对AGNSS开发的意义
-
质量监控:通过 \hat{\sigma}_0σ^0 监控观测质量
-
结果可信度:为用户提供定位结果的可信度指标
-
算法优化:通过精度分析优化观测方案和算法
-
完好性监测:为RAIM等完好性算法提供基础
掌握间接平差的精度评定,就能从"得到一个定位解"进步到"理解这个解有多可靠",这是开发高精度、高可靠性AGNSS系统的关键能力。
下面是学习笔记