当机械臂在68个视角下审视一个普通的杯子,镜面反射、几何对称与姿态变化交织成一幅工业质检的现实图景------RAD基准告诉我们,最前沿的3D重建与视觉大模型,竟不如成熟的2D特征匹配方法来得稳定可靠。
工业质检的终极理想,是让搭载摄像头的机械臂能像经验丰富的质检员一样,从任意角度、在变化的光照下,一眼识别出产品表面的划痕、缺失或污渍。然而,当前学术界引以为傲的 3D神经渲染 和零样本视觉大模型,在实验室的固定视角数据集上表现优异,一旦投入真实的、姿态多变的流水线,性能便大幅滑坡。
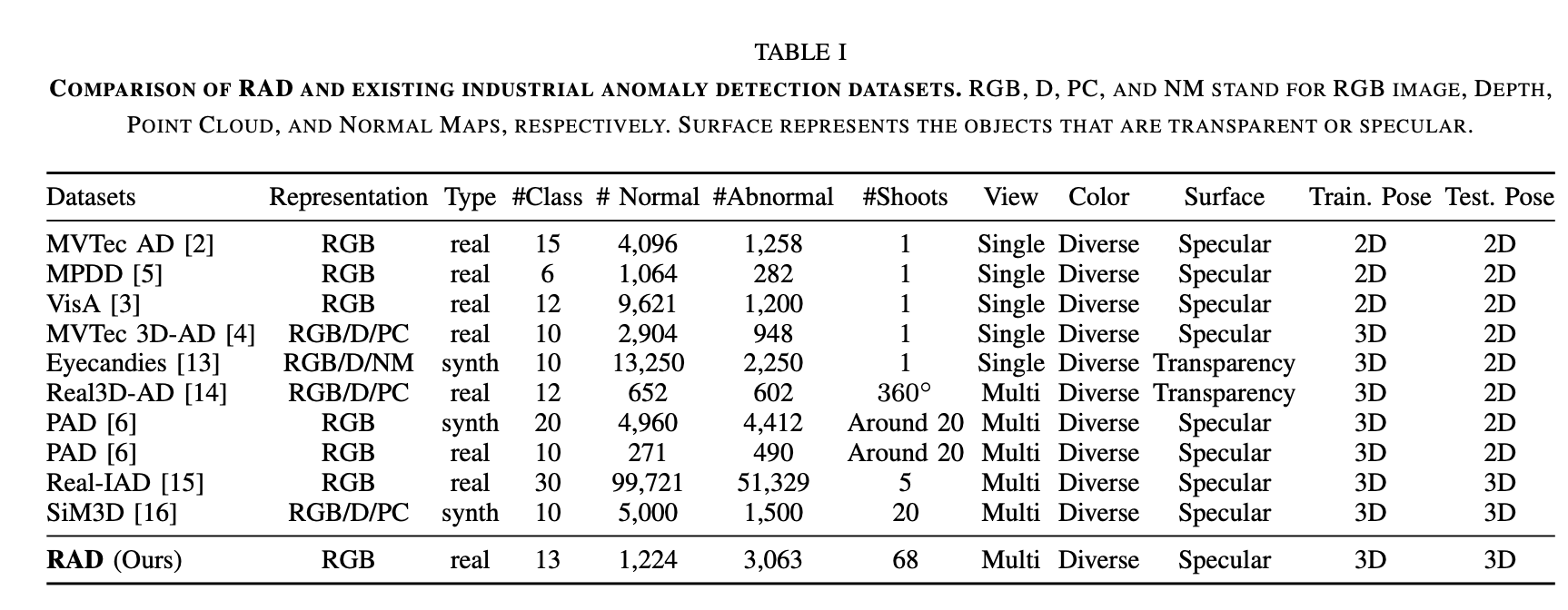
这种理想与现实的割裂 ,源于一个根本性缺失:一个能真实反映机器人巡检复杂性的评估基准。大多数数据集(如MVTec AD)仍在"无菌实验室"条件下构建------固定相机、均匀背景、稳定光照,这与机械臂动态抓取、工件姿态随机、现场光照不可控的现实场景相去甚远。
为此,来自多个机构的研究者联合推出了RAD (Realistic Anomaly Detection) 基准 。它不仅是一个数据集,更是一面"照妖镜",其核心贡献在于:首次系统性地揭示了,在姿态无关 的异常检测这一真实任务下,看似过时的2D特征嵌入方法,其稳健性竟全面超越了更"先进"的3D几何重建与视觉语言模型。
文章地址: https://arxiv.org/pdf/2410.00713v3
开源地址: https://github.com/kaichen-z/rad
01 现实痛点:当"完美"算法遭遇"杂乱"工厂
异常检测是智能制造与机器人感知的核心。随着视觉系统越来越多地被部署到机械臂等移动平台上,算法必须应对三大现实挑战:
- 姿态未知且连续变化:工件在传送带或夹具上的姿态是随机的,算法无法预先对齐视角。
- 复杂材料属性 :金属、塑料等表面会产生强烈的镜面反射,其外观随视角剧烈变化,极易与真实缺陷混淆。
- 稀疏视角覆盖:受限于成本和效率,通常无法采集物体全方位的密集视图用于训练。
现有SOTA基准,如MVTec AD、VisA,均建立在固定视角、稳定光照 的假设上。在此类"理想"数据上训练的模型,学会了匹配固定的纹理模式,却没有学会区分"因视角变化引起的正常外观变化"与"真正的物理缺陷"。这就好比一个学生在标准题库中考了高分,却无法解决开放性的实际问题。
RAD基准的提出,正是为了填补这一"仿真到现实 "的鸿沟,逼迫算法在更接近真实工业场景的严苛条件下证明自己。
02 核心设计:一个高保真、姿态无关的"压力测试场"
RAD的设计哲学是最大化真实性与挑战性。
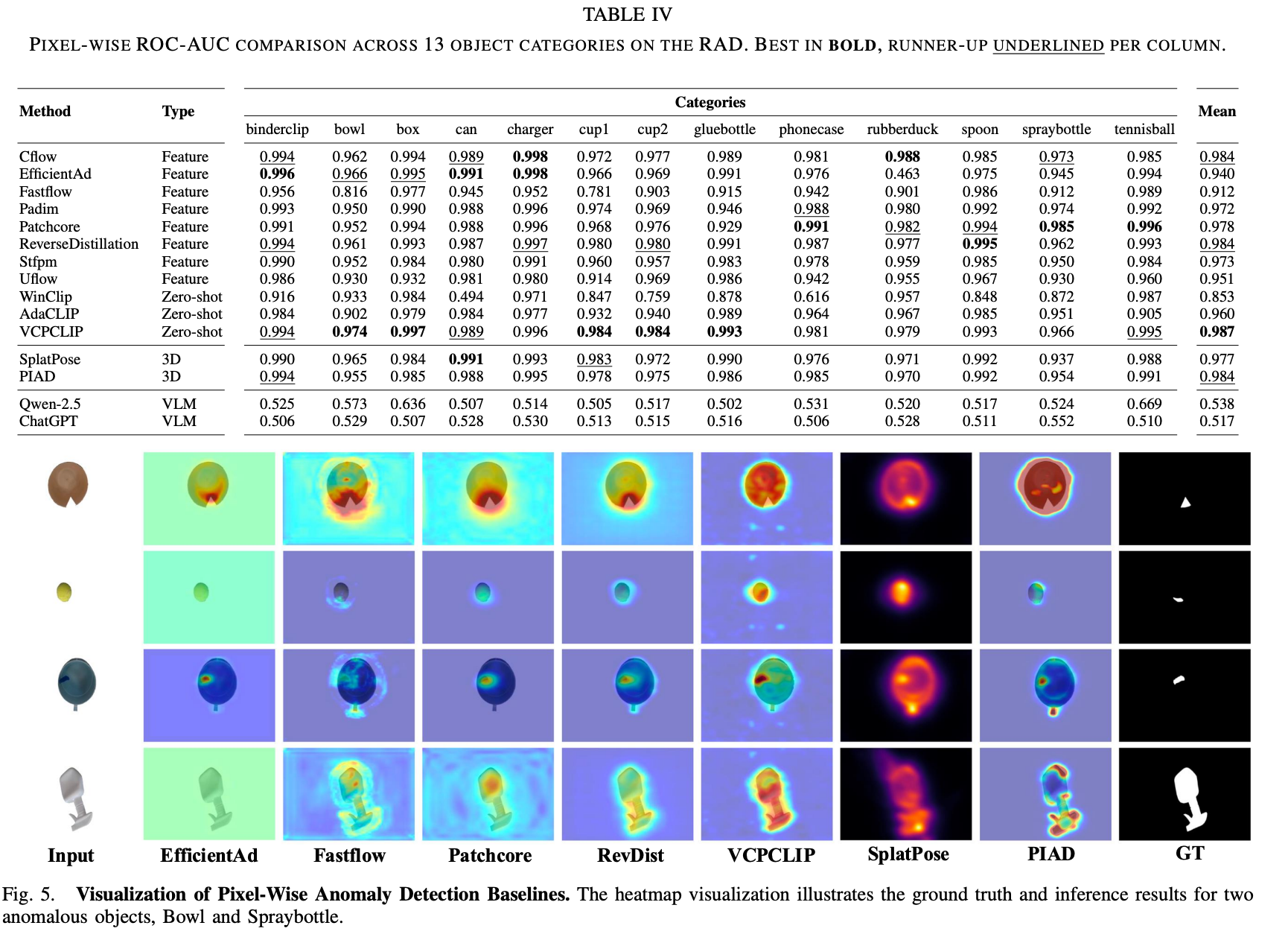
数据采集 :使用Franka Emika Panda机械臂搭载RGB-D相机,对13个日常物体(如杯子、喷雾罐、网球)从68个 预定义的视点进行采样,覆盖360°范围。关键在于,整个过程在非受控光照下进行,引入了真实的阴影与反射变化。
缺陷定义 :包含四种真实世界常见的缺陷:划痕、缺失部件、污渍、挤压变形。缺陷的可见性通常是视角依赖的,这极大增加了检测难度。
任务定义 :姿态无关异常检测。算法在训练时能获取正常样本及其对应的相机位姿 T_i ∈ SE(3)。但在测试时,面对一张来自未知位姿 T 的查询图像 q,算法必须判断其是否存在异常,并定位异常像素。
这一任务的核心数学挑战是:将因姿态变化导致的外观差异,与因真实缺陷导致的差异分离开来。主流的3D方法试图通过重建和姿态对齐来解决:

其中 ℳ 是由正常视图训练的3D模型(如NeRF或3D高斯泼溅),ℛ_ℳ(T) 是从位姿 T 的渲染图。对齐后,在特征空间计算差异作为异常分数:

这个计算图的致命弱点 在于,它严重依赖于3D重建与姿态估计的精确性。而镜面反射 和几何对称性会同时破坏这两者,最终将渲染噪声误判为异常。
03 实验洞察:"简单"的胜利与"复杂"的窘境
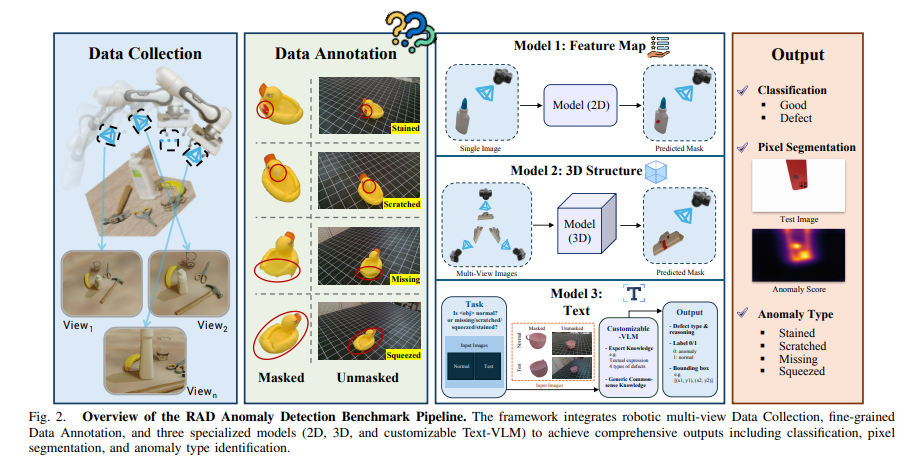
RAD论文对三大技术路线进行了基准测试:
- 2D特征嵌入:PatchCore, EfficientAD等,在图像块特征空间中构建正常样本的记忆库。
- 3D重建:SplatPose, PIAD等,基于3D高斯泼溅进行重建、渲染与对齐。
- 视觉语言模型 :Qwen2.5-VL, ChatGPT-4o, 采用提示工程进行零样本检测。
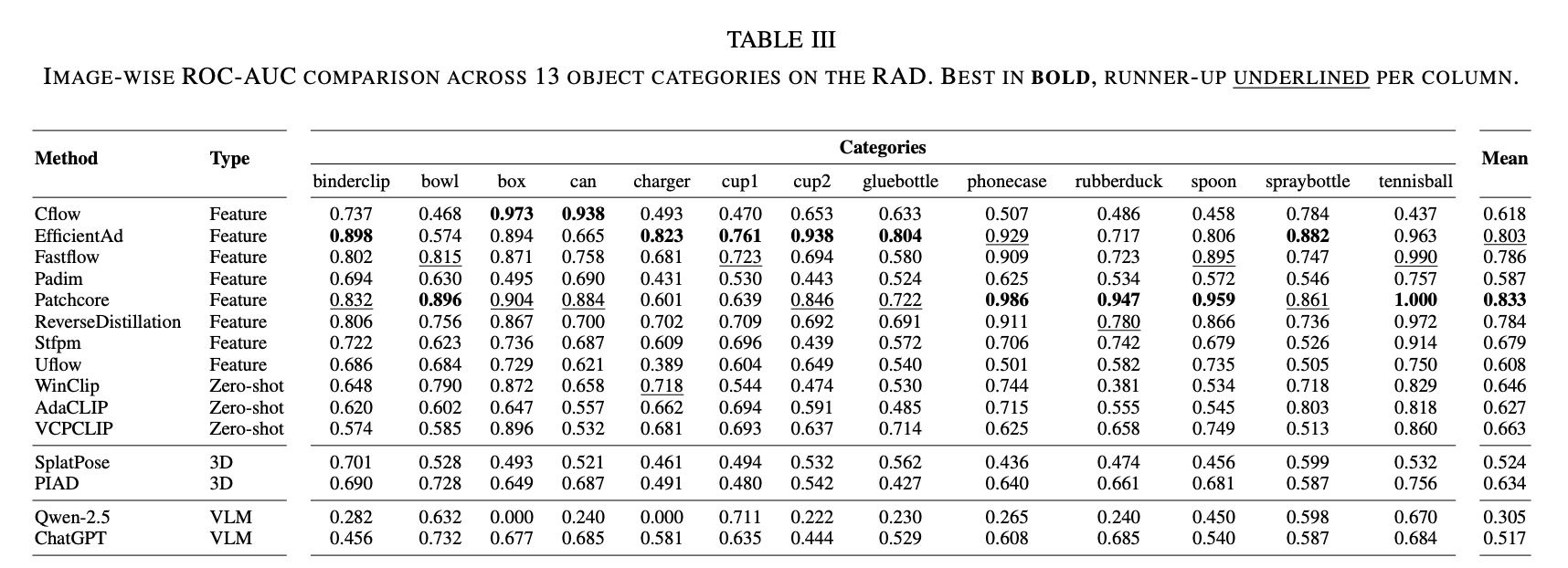
核心发现令人震惊:在图像级异常分类任务上,成熟的2D方法(如PatchCore)显著且稳定地优于3D和VLM方法。
| 方法类别 | 代表模型 | 图像级平均AUROC | 关键优势 | 核心缺陷 |
|---|---|---|---|---|
| 2D特征嵌入 | PatchCore | 0.833 | 稳健、成熟、对轻微错位不敏感 | 未显式建模几何 |
| 3D重建 | PIAD | 0.634 | 理论上的几何一致性 | 对反射、对称性极度敏感 |
| 视觉大模型 | ChatGPT-4o | 0.517 | 零样本、无需训练 | 像素级定位能力缺失 |
1. 为什么3D方法会失灵?
论文的消融分析 指出,反射表面 和几何对称性 是导致3D方法性能崩塌的关键变量。这是最大的"调参陷阱" :在实验室的漫反射物体上,3D重建精度很高,算法表现优异;一旦遇到现实中的金属罐头(高光)或对称的网球,姿态估计便会因模糊性而失效,重建模型产生伪影,最终导致灾难性的误报。其计算开销也巨大,不仅需要在线优化姿态(迭代优化,耗时),还需要维护和渲染一个3D模型,空间和计算复杂度远高于2D方法。
2. 为什么VLM表现甚至不如随机猜测?
尽管VLM拥有强大的语义理解能力,但其预训练目标与像素级异常定位任务存在根本性不匹配 。VLM缺乏对细微纹理差异的感知能力,且对光照、背景等成像条件的变化过于敏感。更重要的是,它无法理解"这个视角下看起来奇怪,可能只是因为视角本身,而非物体有缺陷"这一关键逻辑。
3. 2D方法的"秘密武器"
以PatchCore为代表的2D方法,其成功在于隐式学习 。它的"记忆库"中存储了来自多个视角的正常图像块特征。在推理时,即使查询图像的姿态未对齐,它也能在特征空间中快速找到最相似的正常块进行对比。这种方式绕过了显式且脆弱的3D重建与姿态估计环节,对由反射、对称性引起的特征变化表现出了意外的鲁棒性。其推理过程本质上是最近邻搜索,计算效率高,更易于部署。
04 工程落地:务实的选择与未来的方向
给算法工程师的实践建议:
- 勿盲目追新 :在考虑为工业质检场景引入炫酷的3D重建或VLM方案前,先用RAD这样的基准测试一下。对于许多实际场景,经过充分优化的2D特征方法(如PatchCore, EfficientAD)可能是成本效益比最高、最稳健的选择。
- 警惕"实验室陷阱" :评估模型时,必须将其置于包含反射物体 和对称物体的测试集中。论文中罐头(Can)、喷雾瓶(Spraybottle)等类别就是很好的"试金石"。
- 计算资源权衡:3D方法在像素级定位上仍有优势(PIAD像素级AUROC达0.984),但这付出了巨大的计算代价。工程上需要权衡:是追求极致的定位精度,还是保证整体的检测鲁棒性与实时性。
适用场景分析:
- 2D方法 :适用于大多数外观检测 场景,尤其是物体纹理相对丰富、相机视角变化在一定范围内的在线检测。是当前落地性价比之王。
- 3D方法 :适用于对几何变形 (如挤压、凹陷)异常极度敏感,且物体表面为漫反射、能获取高质量多视角数据的高精度离线检测场景。
- VLM方法 :目前不适合 直接的工业异常检测。其潜力可能在于辅助缺陷描述与分类 ,或作为预处理模块进行可疑区域初筛。
05 总结与局限性:一面映照出现实复杂性的镜子
RAD基准的价值,不仅在于提供了一个更真实的数据集,更在于它颠覆了"技术越新必然越好"的线性思维。它清晰地表明,在真实世界的混乱与约束面前,一个精心设计的、专注于解决核心问题(区分正常变化与异常)的"简单"模型,可能比一个庞大但脆弱的"复杂"系统更为有效。
该工作的局限性:
- 数据规模与多样性:尽管真实性高,但13个物体类别仍显不足,未来需要扩展到更广泛的工业零件。
- 未深入探索融合路径 :实验主要对比了不同范式的独立表现,未来研究应聚焦于如何融合2D的稳健性与3D的几何感知能力,例如开发对姿态和反射变化具有不确定性的融合模型。
- 动态场景缺失:当前基准是静态的。真实的机械臂巡检可能是动态、连续的,如何利用时序信息是下一个挑战。
硬核点评 :RAD是一次必要的"回归现实"的尝试。它告诉学术界,在工业这个赛场,稳健性(Robustness)的权重应远高于在理想数据上的峰值精度(Peak Accuracy)。它也为工业AI的研发指出了一个务实的方向:与其一味追求模型的"大"与"新",不如深入理解物理世界的约束(反射、对称、稀疏),并据此设计更具针对性的算法。这份基准,是所有致力于将计算机视觉技术真正应用于工业一线的研究者和工程师的必读之作。