脉冲压缩
让我们探索在时间上或频率上调制CW时会发生什么。调制充当标记,可以据此确定距离,正如我们下面很快将看到的。此外,调制信号的带宽不再是单一的脉冲。这种频率上的扩展在时域中产生了一个窄信号,这对雷达是有利的。想想多个返回信号之间的重叠。这种时域窄信号的Echo可以在接收器处清晰地区分。
然而,从射频电路设计的角度来看,在生成和处理高功率短持续时间信号方面存在几个实际障碍。问题是如何在最小化实现复杂性的同时实现短持续时间。
解决方案是信号本身不必具有短持续时间。回想一下,任何返回信号都由接收器中的滤波器处理。由于卷积在滤波器中非常类似于相关过程,即使信号本身在时间上不紧凑,滤波器或相关输出也应该产生一个窄时域尖峰!
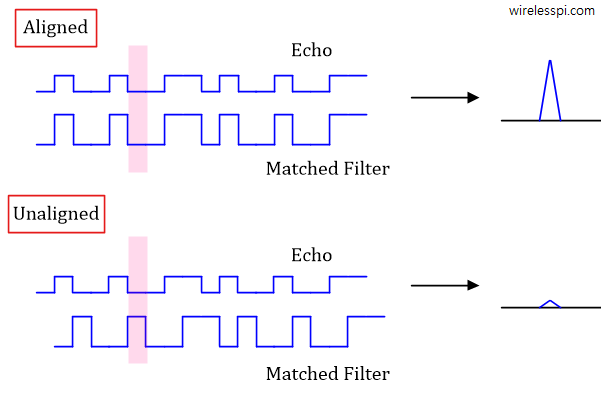
这个想法产生了所谓的处理增益。通过直接序列扩频(DSSS)示例可以最好地理解处理增益。在这种情况下,每个数据符号都用比原始数据信号速率更高的扩频序列进行调制。这种更高的速率被称为处理增益或扩频因子。为了在接收端恢复原始数据,使用相同的序列并充当匹配滤波器。
- 考虑下面的顶部子图,注意Echo中的 − 1 -1 −1和匹配滤波器中的 − 1 -1 −1是如何同步的,以及剩余的序列。因此,接收器处完全相同序列的完全对齐副本在逐点乘法后求和过程中(称为相关)产生一个更高的值。这就是用于测量目的的标记。
- 注意底部子图中显示的框中,Echo中的 − 1 -1 −1与匹配滤波器中的 + 1 +1 +1相乘,输出可以被认为是 + 1 +1 +1和 − 1 -1 −1的随机求和。因此,未对齐的序列,即使具有相同的值,与处理增益相比也会产生非常小的输出。
DSSS系统的常见示例包括全球定位系统(GPS)、WiFi网络中的IEEE 802.11b标准和码分多址(CDMA)蜂窝系统。
FMCW雷达使用线性调频脉冲(chirp)代替扩频序列,用于类似目的,如下图所示。线性调频脉冲是频率线性变化的信号。这就是为什么这个过程被称为线性频率调制(LFM)。

回想一下,两个正弦波的乘积会产生一个差频和一个和频。
2 cos ( 2 π f 1 t ) ⋅ cos ( 2 π f 2 t ) = cos 2 π ( f 1 − f 2 ) t + cos 2 π ( f 1 + f 2 ) t 2\cos\left(2\pi f_1 t\right)\cdot \cos\left(2\pi f_2 t\right) = \cos\left2\\pi(f_1 - f_2)t\\right + \cos\left2\\pi(f_1 + f_2)t\\right 2cos(2πf1t)⋅cos(2πf2t)=cos2π(f1−f2)t+cos2π(f1+f2)t
长时间间隔的求和,如在相关中执行的,会产生上述两个项的低值(因为它们具有相等的正负两半),如上图底部所示。
另一方面,正弦波与自身的乘积会产生一个直流增益以及一个倍频。将 f 1 = f 2 = f f_1=f_2=f f1=f2=f代入上述表达式,我们得到
2 cos 2 ( 2 π f t ) = 1 + cos ( 2 π ⋅ 2 f ⋅ t ) 2\cos^2(2\pi ft) = 1+\cos (2\pi \cdot 2f\cdot t) 2cos2(2πft)=1+cos(2π⋅2f⋅t)
在FMCW波中,正弦波频率不断变化。当与自身完美对齐相关时,相似的频率排列在一起产生一个高峰值,如上图顶部所示。这被称为脉冲压缩,是通过匹配滤波实现的。
!NOTE
涉及到匹配滤波的概念,还有数学上的相关性等概念
现在让我们找出FMCW波形是什么样的。
FMCW波形
从一个包含线性瞬时相位的基本复正弦波开始,我们可以通过将其扩展为二次瞬时相位,即 e j π μ t 2 e^{j\pi \mu t^2} ejπμt2,转向一个基本的线性调频脉冲,其中因子 π \pi π的原因很快就会被解释。下图绘制了这个信号。注意,相位不是随时间线性变化,而是随时间二次变化。这就是为什么信号似乎越来越向右压缩。就像频率 f f f是相位的速度或变化率一样,线性调频脉冲速率 μ \mu μ是相位的加速度或频率的变化率。
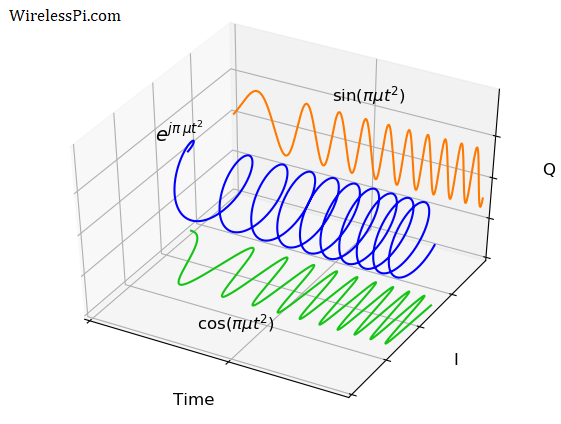
从欧拉关系来看,实信号 cos ( π μ t 2 ) \cos (\pi \mu t^2) cos(πμt2)可以看作是这个复正弦波在实平面(由时间和 I I I轴形成)上的投影。此外,虚信号 sin ( π μ t 2 ) \sin (\pi \mu t^2) sin(πμt2)可以看作是这个复正弦波在虚平面(由时间和 Q Q Q轴形成)上的投影。
通常将这个图绘制为二维,如下所示。顶部子图是上述复线性调频脉冲的同相部分,线性调频脉冲持续时间为 T C T_C TC。
- 在这里,很明显为什么它可以被视为由线性变化频率调制的CW。线性调频脉冲扩展了频谱,并在多用户应用中被称为线性调频脉冲扩频(CSS)。
- 由于频率在增加,这个波形被称为上线性调频脉冲。我们很快将看到下线形调频脉冲的示例。
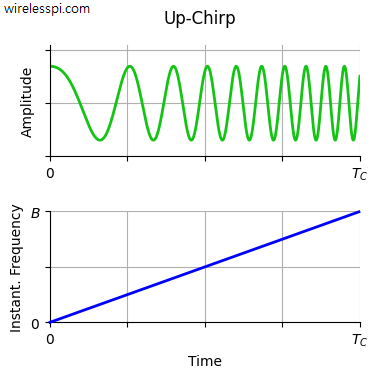
线性调频脉冲的频谱包含了从信号中存在的低初始频率到高最终频率的宽带。然而,如果您熟悉FMCW雷达,底部子图就是您以前见过的。为了看看这是从哪里来的,让我们写出基本线性调频脉冲的一般表达式,包括频率和相位部分。
x ( t ) = e j ( π μ t 2 + 2 π f t + θ ) (5) x(t) = e^{j(\pi \mu t^2 + 2\pi f t+\theta)}\tag{5} x(t)=ej(πμt2+2πft+θ)(5)
因子 π \pi π实际上是 2 π 2\pi 2π乘以 1 / 2 1/2 1/2。这被包括进来是为了归一化线性调频脉冲速率,将其作为瞬时频率的斜率(定义为参数的导数)。
ν ( t ) = 1 2 π d d t ( π μ t 2 + 2 π f t + θ ) = μ t + f (6) \nu(t)=\frac{1}{2\pi}\frac{d}{dt}\left(\pi \mu t^2 + 2\pi f t+\theta\right) = \mu t + f\tag{6} ν(t)=2π1dtd(πμt2+2πft+θ)=μt+f(6)
这是上图中绘制的底部子图的关系,其中 f f f是起始频率(不是相位),为了简单起见,显示为 0 0 0(否则,垂直轴应该从 f f f到 f + B f+B f+B)。在这里,线性调频脉冲在时间段 T C T_C TC(也称为扫描时间)上跨越带宽 B B B(称为扫描带宽)。因此,我们可以找到斜率 μ \mu μ为
μ = B T C (7) \mu = \frac{B}{T_C}\tag{7} μ=TCB(7)
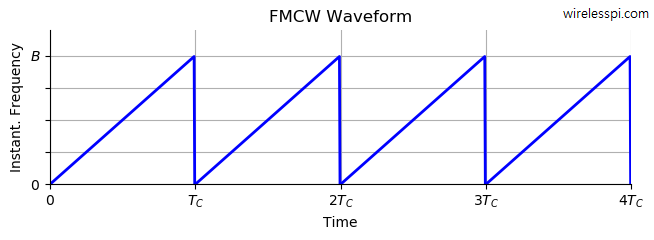
线性调频脉冲速率 μ \mu μ的单位应该是Hz/秒,但通常以MHz/ μ s \mu s μs为单位。在典型的传输中,几个这样的线性调频脉冲按顺序传输,结果得到的FMCW波形具有如下图所示的频率与时间图。请记住,实际的IQ信号仍然是那些一个接一个发送的螺旋线性调频脉冲。
为了完整性,上linear调频脉冲不是FMCW雷达可以利用的唯一选择。频率线性减小,称为下linear调频脉冲,也是可能的,如下所示。实际的信号和频率与时间图显示在左侧。
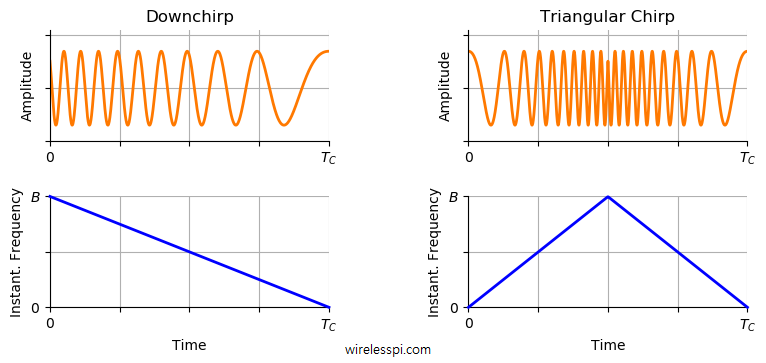
在某些情况下,上linear调频脉冲和下linear调频脉冲的组合被证明更有用。例如,当需要检测静态和移动物体时。这种波形,显示在右侧上方,被称为三角形linear调频脉冲。
现在我们准备看看FMCW雷达如何找到单个目标的距离。
单个目标的距离
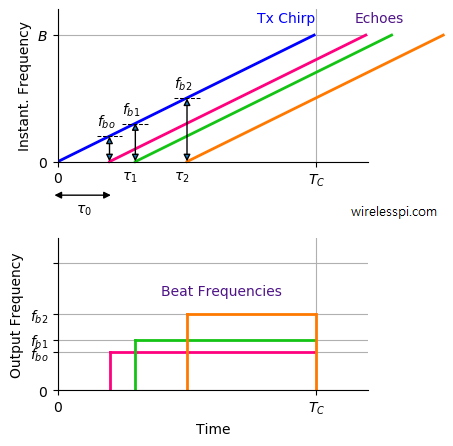
FMCW雷达传输公式( 5 5 5)中的频率调制CW波形。假设在距离 d 0 d_0 d0处有一个单一目标,返回的回波是相同信号的延迟版本。延迟的回波绘制在下面的Tx时间线上。请记住,这不是实际的波形,而是频率与时间图,波形中的延迟 τ 0 \tau_0 τ0也会引入频率差 f b f_b fb,称为拍频或中频(IF)。拍频这个表达来自于它源于Tx和Rx线性调频脉冲之间的差异,正如我们很快将在DSP方法中看到的那样。
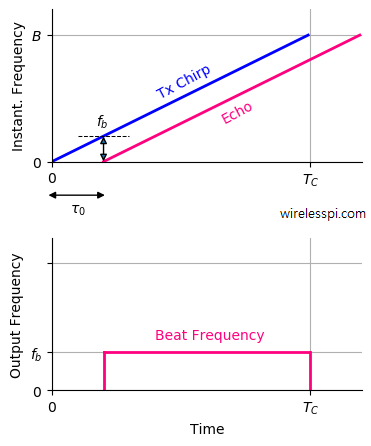
可以通过测量时间延迟 τ 0 \tau_0 τ0来找到距离。然而,与通过简单算术运算测量拍频相比,测量小延迟的过程要复杂和不准确得多。
从这里开始有三种技术。
几何方法
为了找到回波的时间延迟 τ 0 \tau_0 τ0和拍频 f b f_b fb之间的关系,请考虑上图中斜率为 μ \mu μ的直线。使用直线方程 y = m x y=mx y=mx,我们可以写出
f b = μ τ 0 f_b = \mu \tau_0 fb=μτ0
由于 τ 0 = 2 d 0 / c \tau_0=2d_0/c τ0=2d0/c和 μ = B / T C \mu=B/T_C μ=B/TC来自公式( 7 7 7),我们有
f b = μ 2 d 0 c , 或 d 0 = c T C f b 2 B f_b = \mu \frac{2d_0}{c}, \qquad \text{或}\qquad d_0 = \frac{cT_C f_b}{2B} fb=μc2d0,或d0=2BcTCfb
另一种方法是注意到上图由 τ 0 \tau_0 τ0和 f b f_b fb形成的小三角形与由扫描时间 T C T_C TC和扫描带宽 B B B形成的大三角形相似。利用相似三角形的边比相等的性质,我们得到
τ 0 T C = f b B , 或 τ 0 = T C f b B \frac{\tau_0}{T_C} = \frac{f_b}{B}, \qquad \text{或} \qquad \tau_0 = T_C\frac{f_b}{B} TCτ0=Bfb,或τ0=TCBfb
这也等于 2 d 0 / c 2d_0/c 2d0/c。这转换为双向距离,表示为
d 0 = c T C f b 2 B d_0 = \frac{cT_C f_b}{2B} d0=2BcTCfb
现在我们看到了如何实现相同的结果。
直观方法
由于每个数学表达式都在告诉我们一个故事,因此找到距离的一个常识性方法如下。
- 线性调频脉冲速率 μ \mu μ是频率变化的速率,或每单位时间的频率变化。
- linear调频脉冲需要时间 τ 0 \tau_0 τ0在FMCW雷达和目标之间往返。
- 在此间隔期间,频率变化为
频率变化 = 频率变化 时间 × 时间 \text{频率变化} = \frac{\text{频率变化}}{\text{时间}}\times \text{时间} 频率变化=时间频率变化×时间
f b = μ τ 0 f_b = \mu \tau_0 fb=μτ0
其余的 d 0 d_0 d0推导保持不变。接下来,我们通过DSP方法探讨这个问题。
DSP方法
另一种方法与之前在CW情况下所做的相同。延迟波形可以写为
r ( t ) = e j π μ ( t − τ 0 ) 2 + 2 π f ( t − τ 0 ) + θ r(t) = e^{j\\pi \\mu (t-\\tau_0)\^2 + 2\\pi f (t-\\tau_0) + \\theta} r(t)=ejπμ(t−τ0)2+2πf(t−τ0)+θ
为了保持表达式简单,我们在这里忽略了振幅因子。雷达中的信号处理是在离散时间中执行的,但我们可以在连续时间中找到主要表达式。与相同波形的复混合过程然后产生
y ( t ) = e j π μ ( t − τ 0 ) 2 + 2 π f ( t − τ 0 ) + θ ⋅ e − j ( π μ t 2 + 2 π f t + θ ) = e j ( − 2 π μ τ 0 t ⏟ 2 π f b + π μ τ 0 2 − 2 π f τ 0 ⏟ ϕ ) (8) y(t) = e^{j\\pi \\mu (t-\\tau_0)\^2 + 2\\pi f(t-\\tau_0) + \\theta} \cdot e^{-j(\pi \mu t^2 + 2\pi f t + \theta)} = e^{j(\underbrace{-2\pi \mu \tau_0 t}{2\pi f_b} + \underbrace{\pi \mu \tau_0^2 - 2\pi f \tau_0}{\phi})} \tag{8} y(t)=ejπμ(t−τ0)2+2πf(t−τ0)+θ⋅e−j(πμt2+2πft+θ)=ej(2πfb −2πμτ0t+ϕ πμτ02−2πfτ0)(8)
上面唯一包含 t t t的项是第一个,它决定了输出波形的频率:拍频。由于负号与距离无关,
2 π f b = 2 π μ τ 0 , 或 f b = μ τ 0 2\pi f_b = 2\pi \mu \tau_0, \qquad \text{或} \qquad f_b = \mu \tau_0 2πfb=2πμτ0,或fb=μτ0
这可以简化为
τ 0 = f b μ \tau_0 = \frac{f_b}{\mu} τ0=μfb
我们推导出以下内容。
将上面的表达式与公式( 1 1 1)进行比较。除了由于相位定义方式而产生的 2 π 2\pi 2π差异外,它们讲述的是同一个故事!
"延迟 τ 0 \tau_0 τ0由变化参数与恒定探测参数的比率给出。"
这是一个美丽的结果,显示了DSP中潜在的的一致性,准确地揭示了信号内部发生了什么。这种见解在其他更简单的方法中仍然是隐藏的。
其余的详细信息是相同的。由于 τ 0 = 2 d 0 / c \tau_0=2d_0/c τ0=2d0/c和 μ = B / T C \mu=B/T_C μ=B/TC,我们有
d 0 = c f b 2 μ = c T C f b 2 B (9) d_0 = \frac{cf_b}{2\mu} = \frac{cT_Cf_b}{2B}\tag{9} d0=2μcfb=2BcTCfb(9)
它与之前通过几何和直观方法得出的结果相同。
在距离 d 0 d_0 d0的表达式中,除了拍频 f b f_b fb之外的所有参数都是已知的,因为 c c c是电磁波的速度,而 T C T_C TC和 B B B是系统设计参数。然而,在我们深入探讨之前,我们提到了上面遗漏的一点。
但是相位呢?
如果你是研究人员,你会立即发现我们在公式( 8 8 8)中遗漏了一些东西。相位还包含一些可以被利用来改善估计的距离信息。
ϕ = π μ τ 0 2 − 2 π f τ 0 \phi = \pi \mu \tau_0^2 ~-~ 2\pi f\tau_0 ϕ=πμτ02 − 2πfτ0
虽然我们仅使用拍频 f b f_b fb来测量距离,但我们在第2部分中看到如何将这些相位信息拼接在一起以找到移动目标的速度。
寻找拍频 f b f_b fb
为了找到完全确定距离公式( 9 9 9)的拍频 f b f_b fb,我们需要丢弃频率与时间图,并参考实际波形。
实际上,延迟的回波与下linear调频脉冲混合以产生输出,请参见上面的公式( 8 8 8)。
y ( t ) = e j ( 2 π f b t + ϕ ) y(t) = e^{j(2\pi f_b t +\phi)} y(t)=ej(2πfbt+ϕ)
这个波形不是别的,而是一个简单的复正弦波!这就是频率为 f b f_b fb的CW,其实部绘制在下图中,以及其频谱。
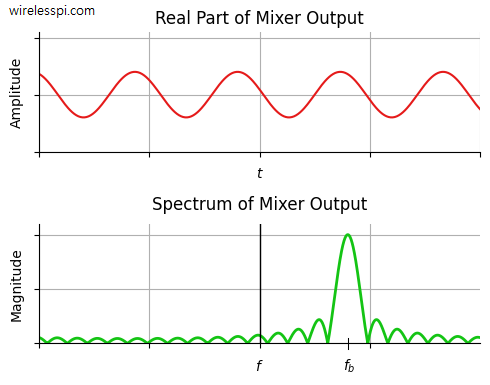
为什么频谱具有sinc形状?虽然DSP人员可以查看正弦波频谱的数学推导,但直观的推理如下。
- 时域中频率为 f b f_b fb的无限长复正弦波在频域中的频谱是在 f b f_b fb处的脉冲。
- 时域中的矩形信号在频域中的DC处是sinc信号。
- 像上面的正弦波这样的有限持续时间波形类似于无限波形乘以矩形信号。
- 时域中的乘法在频域中是卷积。
- 在 f b f_b fb处的脉冲与在DC处的sinc信号的卷积只是将sinc信号放在频率 f b f_b fb处,如上图中频谱所示。
现在问题简化为寻找噪声中正弦波的频率。有几种技术可用于准确估计噪声中正弦波的频率,请参见《从头开始无线通信》第6章中的一些示例。
一旦知道了 f b f_b fb,就可以将其代入公式( 9 9 9)来确定距离。而且这个频率不受像相位那样的 2 π 2\pi 2π跨度限制!
提醒一句:在这样的计算中很容易忽略相位部分,但必须将其包括在内以进行适当的分析,特别是在联合通信和感知应用中。
距离FFT
想象一下,当环境中存在多个目标时会发生什么。例如,自动驾驶汽车必须确定其与周围所有事物的距离,以及移动物体的速度。
让我们首先考虑静止目标的情况。移动目标将在第2部分中描述。
累积信号
在这种情况下,雷达接收到的不是单个回波,而是多个回波相互重叠形成累积信号。下图绘制了3个目标的这样一个示例。回波在时间延迟 τ 0 \tau_0 τ0、 τ 1 \tau_1 τ1和 τ 2 \tau_2 τ2之后到达,而混合后产生的拍频分别表示为 f b o f_{bo} fbo、 f b 1 f_{b1} fb1和 f b 2 f_{b2} fb2。延迟越大,拍频越大。
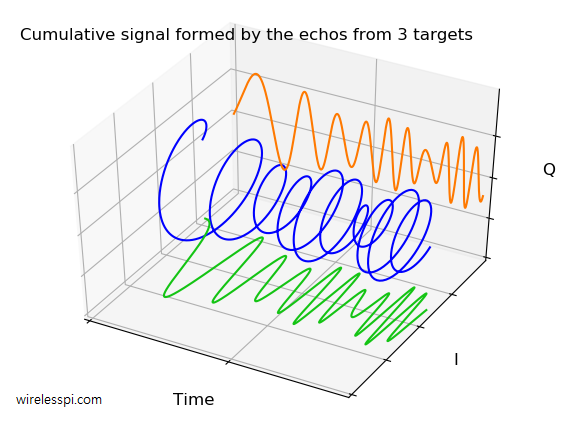
从上面的底部子图中很容易认为累积信号是三个常数的和,因此是一个常数信号。但请记住,这是频率与时间图。实际信号由来自3个目标的反射形成,这些目标本质上是具有不同参数的3个linear调频脉冲。这个累积信号绘制在下图中。在线性调频脉冲解调后,很容易看出输出信号是3个正弦波的和,类似于公式( 8 8 8)。
这个混频器输出或IF信号可以写为
y ( t ) = e j ( 2 π f b o t + ϕ o ) + e j ( 2 π f b 1 t + ϕ 1 ) + e j ( 2 π f b 2 t + ϕ 2 ) y(t) = e^{j(2\pi f_{bo}t+\phi_o)} + e^{j(2\pi f_{b1}t+\phi_1)} + e^{j(2\pi f_{b2}t+\phi_2)} y(t)=ej(2πfbot+ϕo)+ej(2πfb1t+ϕ1)+ej(2πfb2t+ϕ2)
由于多个反射回波,不能采用寻找噪声中正弦波频率的算法。相反,我们可以做的是在返回信号的频谱中找到高于某个阈值的峰值。我们如何计算信号频谱?
寻找拍频 f b f_b fb
即使是DSP初学者也听说过快速傅里叶变换(FFT)算法,由于其对科学技术的巨大影响,它被称为20世纪的算法。FFT不过是离散傅里叶变换(DFT)的高效实现,其定义为长度 N N N序列
Y k = ∑ n = 0 N − 1 y n e − j 2 π k N n Yk = \sum_{n=0}^{N-1} yn e^{-j 2\pi \frac{k}{N} n} Yk=n=0∑N−1yne−j2πNkn
上面的数学表达式可以简而言之描述如下。
-
请记住,频率定义为相位的变化率(这里是逐样本)。
-
如果 y n yn yn包含频率为 + k / N +k/N +k/N的分量,则通过逐样本反旋转相同频率但相反方向的复正弦波(即 − k / N -k/N −k/N)会产生输出为单个数字,因为相应的相位在每一步都会被抵消。
-
那个单个数字自然就是频率为 k / N k/N k/N的复正弦波的振幅,是指示该正弦波对构建 y n yn yn的贡献程度。
混频器后来自3个目标反射的累积信号和FFT输出绘制如下。
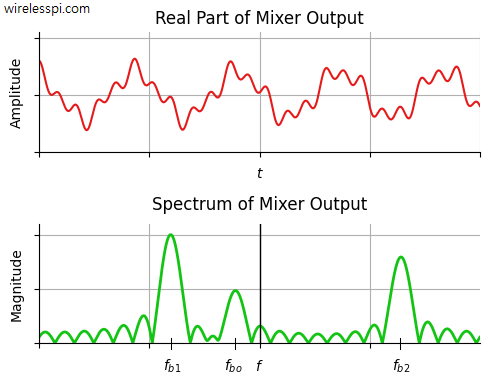
整个FFT过程最终试图找到每个这样的复正弦波在构建被检查信号中的参与。而找到高于某个阈值的来自不同频率的正弦波的贡献正是我们想要的,参见上图。
这给了我们所有三个回波的拍频,从而通过扩展给出了目标距离,参见公式( 9 9 9)。
整个测距程序现在可以在一个图中总结,如下所示。由于它们的互换性,频域由距离轴表示。
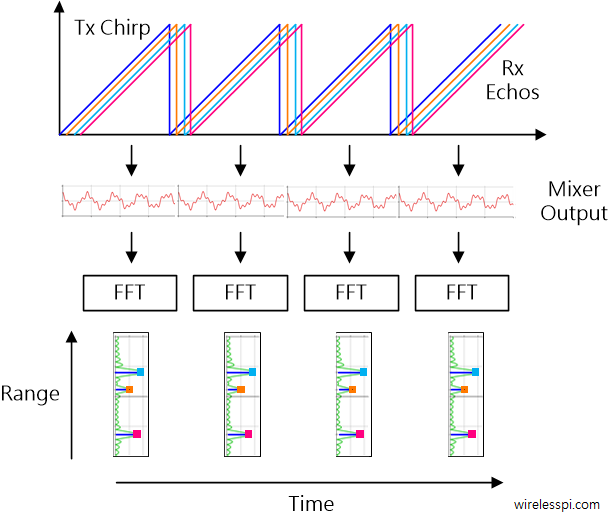
FFT向量垂直堆叠而不是水平序列的原因将在第2部分中变得清晰,届时我们将探讨FMCW雷达如何估计移动目标的速度。最后,在获取FFT之前,将合适的窗口应用于IF信号样本,以最小化DFT泄漏。
结论
总之,FMCW雷达是真实DSP应用最美丽的例子之一。正如Fred Harris所说:"当面临一个无法解决的问题时,将其改变为你能解决的那个问题,然后解决它。"这里可以应用这个原理有两种方式。
1. 测量频率,而不是时间
虽然测量纳秒量级的时间延迟很困难,但通过拍频估计物体的距离变得简单直接。这个拍频 f b f_b fb源于Tx和Rx线性调频脉冲之间混合过程中的交叉项,因为 μ τ 0 \mu \tau_0 μτ0是每单位时间的频率变化乘以时间,因此类似于多普勒频率。
在实际场景中,周围有多个物体,反射的回波通过在Rx处重叠而变得更加麻烦。相反,对混频器输出进行FFT可以轻松通过检测峰值频率来揭示它们的距离。
2. 如果目标不移动,移动信号
回顾过去,CW雷达无法测量静止物体的距离,但可以估计移动目标的速度。一个聪明的人应该把这个想法颠倒过来。我们可以通过引入线性调频脉冲(即线性变化的频率)来移动频率,在反射后揭示静止目标的距离!
它也可以应用于我们的个人和专业互动。而不是期望世界以某种方式行事,通常更容易在我们这边改变某些东西,最终实现相同的目标。
最后,如果您对雷达系统中的目标跟踪感兴趣,可以查看卡尔曼滤波器最简单教程。