工业相机参数
工业相机主要参数有:帧率,曝光,像元尺寸,分辨率
感光芯片:负责将光信号转换为电信号,即负责成像的。
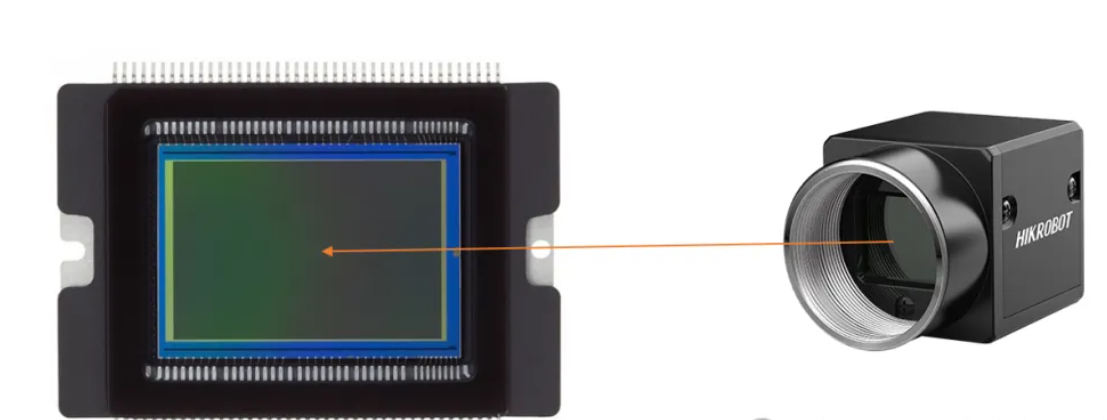
像元是组成数字图像的最小单元。像元尺寸是感光芯片上面单位像元的尺寸,也就是一个像素的大小。像元尺寸和像元数(分辨率)共同决定了相机靶面的大小。
注:通常工业相机的像元尺寸:2μm-14μm(微米),单位一般是微米(μm)。
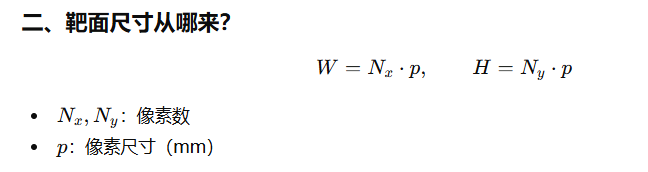
在感光芯片上,靶面尺寸 = 传感器上真正参与成像的有效感光区域尺寸。
把相机简化成针孔模型:
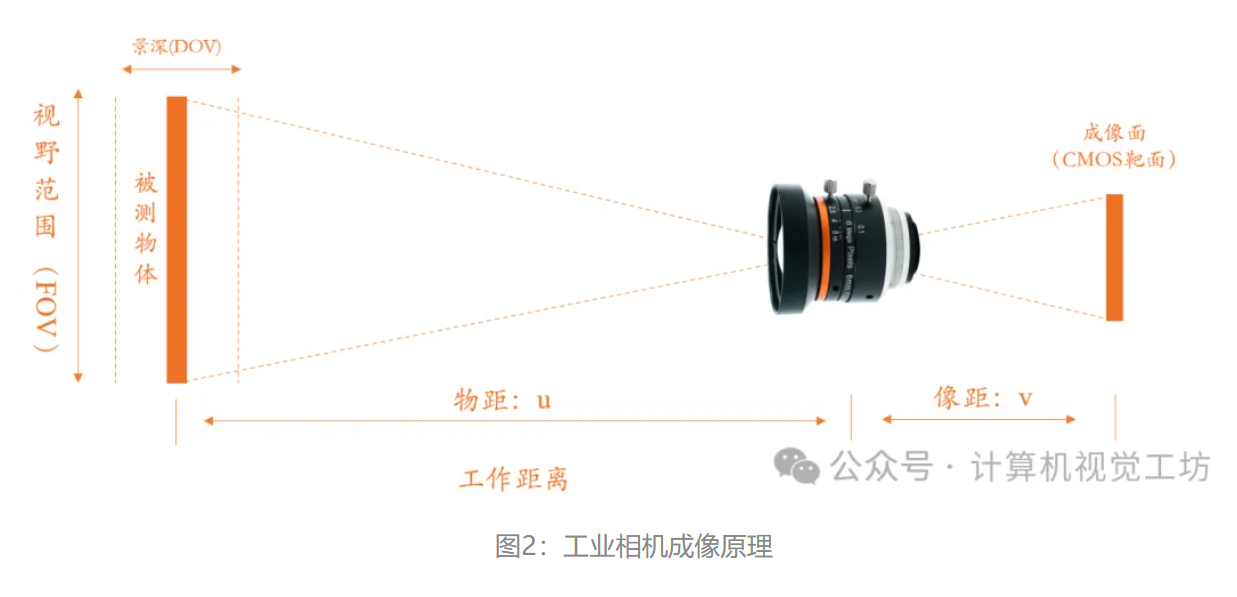
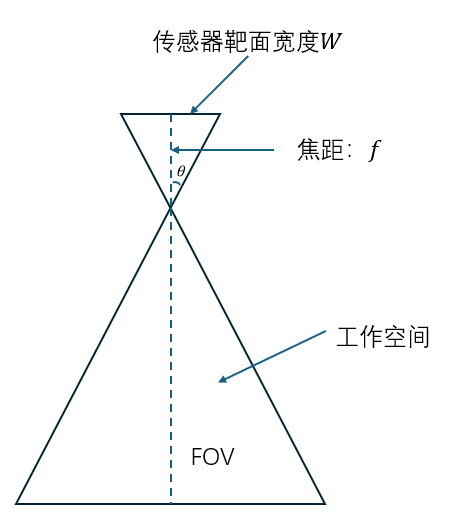
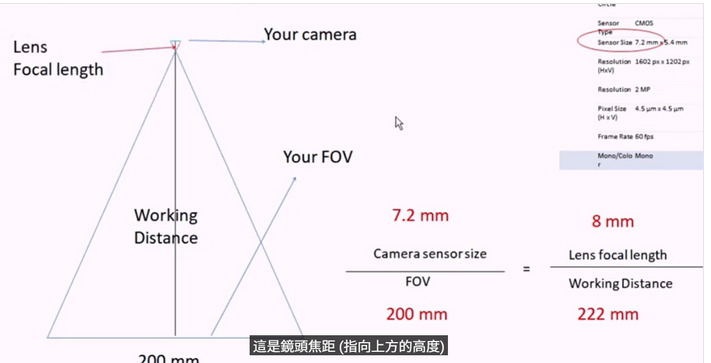
FOV的全称是Field of View(视场角)。如下图所示,根据摄像头的成像原理的情况来看,每一个摄像头的成像宽度是固定的,对于不同的焦距,视场角α的值不一样的。对应的关系如下,焦距越长,视场角越小;焦距越短,视场角越大。对于视野范围来讲,焦距越长,视野范围也远;焦距越短,视野范围越短。
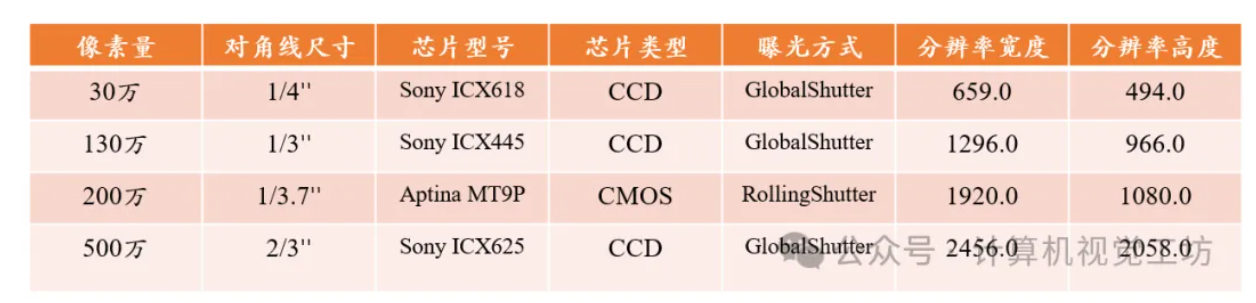
相机分辨率指的是感光芯片上像元的数量,分辨率由像元数(像素数)确定,通俗来说就是出图的大小,有130万,500万等。
曝光
曝光=通光量×曝光时间×增益
通俗来讲曝光就是光线在感光芯片上的作用强度,曝光方式如下:
全局曝光(GlobalShutter):整个芯片同时曝光(CCD)
卷帘曝光(RollingShutter):逐行滚动曝光(CMOS)
曝光量(通光量):由镜头光圈控制
曝光时间:由快门控制,曝光时间越长拍摄图片越亮、
注:结构光同步系统搭建时,都要选择相机为全局曝光模式。
镜头
是将目标物体的图像聚焦在相的感光芯片上,通俗来讲属于一种光学系统。
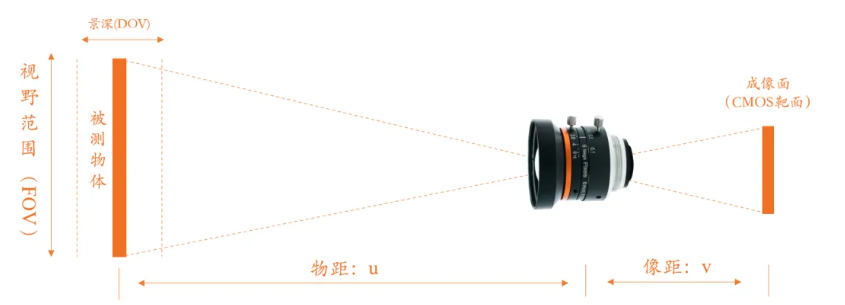
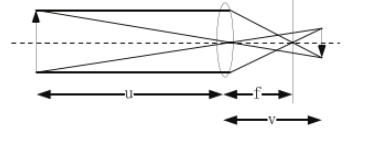
镜头光心到感光靶面的距离为像距(v),被测物体到镜头光心的距离为物距(u),焦距(f)是焦点与镜头中心的距离。像距、物距与焦距f关系如下:

相机的镜头是一组透镜,当平行于主光轴的光线穿过透镜时,会聚到一点上,这个点叫做焦点,焦点到透镜中心的距离叫做焦距 f。
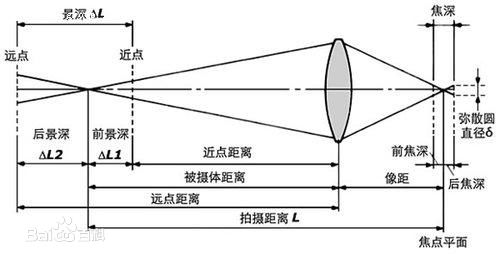
理论上,只有处于镜头焦点距离的景物成像是清晰的,在焦点的前后,光线开始聚集和扩散,成像变得模糊,成像点形成的是一个扩大的圆,这个圆称为弥散圆(circle of confusion)。由于人眼的分辨能力有限,只有当弥散圆直径大到一定程度时,才会感觉到模糊。这一段人眼看起来清晰的距离就是景深(depth of field),此时对应的是容许弥散圆。
在焦点前后各有一个容许弥散圆,这两个弥散圆之间的距离是焦深,对应到被拍摄物体的前后就是景深。
像散是由于镜头对不同方向(子午面和弧矢面)的光线聚焦能力不同,导致成像时出现两个相互垂直的焦线,形成史氏光锥(Sturm's Conoid)。其视觉表现如下:
前焦线(First Focal Line):当垂直方向的光线先聚焦时,形成一条横向的明亮焦线,此时图像在该方向上"相对清晰",但垂直方向仍模糊,视觉上可能呈现横向扩散的模糊感。
后焦线(Second Focal Line):当水平方向的光线随后聚焦,形成一条纵向的明亮焦线,此时图像在水平方向"相对清晰",垂直方向模糊,视觉上可能呈现纵向收缩或拉长的模糊感。
最小弥散圆:介于两焦线之间,是模糊程度最小的区域,此时图像最"可接受"。
光圈
光圈通俗讲是通过收缩和扩大来控制入射光的强度,其位于镜头内部。
它等于镜头焦距f与通光孔径D之比(F=f/D),而通光孔径很大程度上正是由这个物理光圈所控制的。
光学设计中,光阑(Aperture stop)指的是"结构元件",光圈(f-number)指的是"参数/状态。
景深(DOV)
在某个调焦位置上,此时在物体前后会有一段相对成像清晰的区间,我们把成像相对清晰的区间称为景深
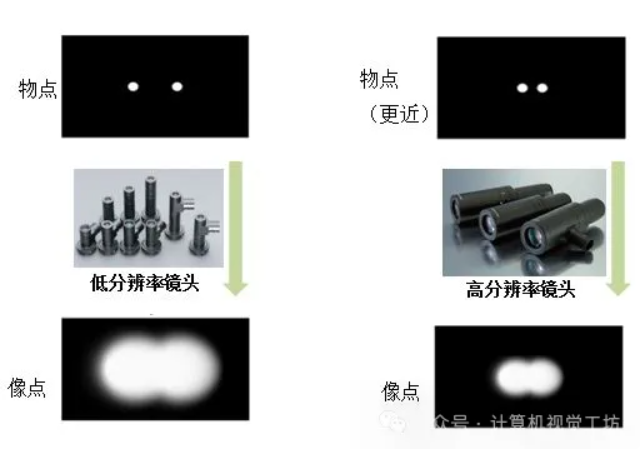
镜头的分辨率
镜头分辨率指的是它能分辨开两个靠近的物点的能力。我们一般用"物点"经镜头成像后的"像点"能被分辨的最小距离来表示,小于这个距离,我们就认为是一个点;而大于这个距离我们认为是两个分开的点,单位为µm。
通俗来讲可以分辨到被测物体上的最小可分辨特征尺寸,多数情况下,视野越小,分辨率越好。
假如拍摄的文字大概有0.3mm的线条厚度,则
基于香农(shannon )原理,你应该有0.3mm / 2.5 =0.12mm per pixel。
0.3mm线条宽度的解析能力。200毫米的FOV;
则像素解析度至少要有0.12mm的精度
200mm / 0.12 = 1666.66; 则相机分辨率至少要有1666pixel;
一、工业相机参数
1、分辨率
相机每次采集图像的像素点数,也是指这个相机总共有多少个感光晶片。在采集图像时,相机的分辨率对检测精度有很大的影响,在对同样打的视场成像时,分辨率越高,对细节的展示越明显。
相机像素 = 水平分辨率 * 垂直分辨率
芯片尺寸 = 水平像素尺寸 * 水平分辨率
感光芯片尺寸=分辨率∗像元尺寸
分辨率( Pixel ) = 相机视野( mm ) / 像素精度( mm / Pixel )
2、精度
精度指一个像素表示实际物体的大小,用(um*um)/pixel表示。注意,像元尺寸并不等于精度,像元尺寸是相机机械构造时固定的,而精度与相机视野有关,是变化的。精度值越小,精度越高。
单个像素对应的大小 = 视野宽 / 宽度分辨率 = 视野高 / 高度分辨率
镜头倍率 = 芯片尺寸 / 实际所需视野
像素精度 = 像素尺寸 / 镜头倍率
像素精度 = 相机视野 / 相机分辨率
像素尺寸 = 产品短边尺寸/所选相机短边像素数
3、帧率/行频
帧率:fps帧率,对应面阵相机,表示每秒能够拍摄的图片张数。
行频:16kHz行频,对应线阵相机,表示每秒能够扫描的行数。最大图像分辨率为分辨率*行频(例2048x16k);
帧率和行频体现相机的最大工作效率,与曝光共同决定成像图片的明暗,帧率和行频很高且曝光低,则图片很暗;帧率和行频很低且曝光高,则图片很亮。
4、像元尺寸
像元尺寸指芯片像元阵列上每个像元的实际物理尺寸,例如3.75umx3.75um 等。像元尺寸从某种程度上反映了芯片的对光的响应能力,像元尺寸越大,能够接收到的光子数量越多,在同样的光照条件和曝光时间内产生的电荷数量越多。对于弱光成像而言,像元尺寸是芯片灵敏度的一种表征。像元尺寸和像元数(分辨率)共同决定了相机靶面的大小,通常工业相机像元尺寸为2μm~14μm。
像元尺寸(宽) = 传感器尺寸(宽) / 分辨率(宽)
像元尺寸(高) = 传感器尺寸(高) / 分辨率(高)
5、曝光时间
曝光时间时为了将光投射到照相感光材料的感光面上,快门所要打开的时间。曝光时间和实际的帧率成反比,也就是曝光时间越长,实际的采集帧率会越低,一般为3um-10ms。
曝光时间 = 像元尺寸 / 像的运动速度 = 像素精度 / 物体的运动速度
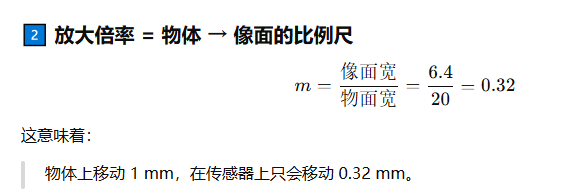
放大倍率 = CCD感光尺寸 / 视场FOV = 焦距 / 工作距离
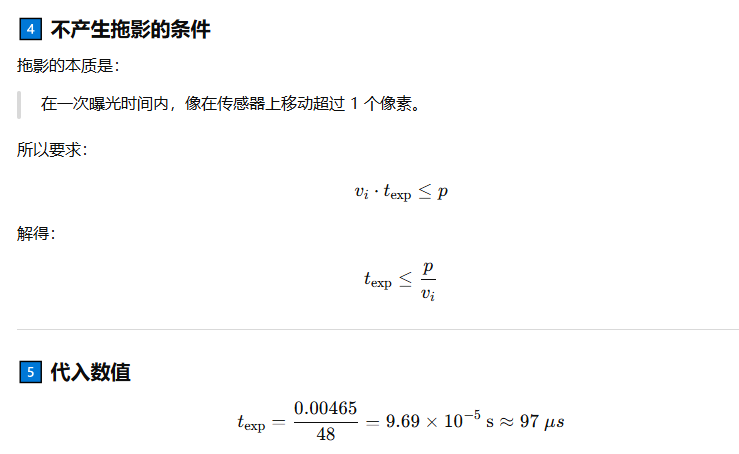
保证在曝光时间内,物体在成像平面上移动不超过 1 个像素,
这样图像里就不会出现"运动拖影"。
相机的飞拍曝光数值计算
案例1:物体的运动速度是150mm/s,沿着芯片的水平方向运动,相机是1/2芯片(6.4mm*4.8mm),视场水平方向长度是20mm,像元尺寸是4.65um,计算成像时不产生拖影的曝光时间。
首先计算出像的运动速度
放大倍数 = CCD感光尺寸 / 视场FOV = 6.4mm / 20mm = 0.32,
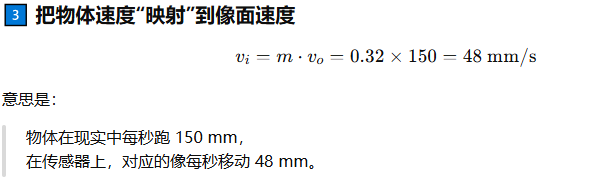
像的运动速度 = 放大倍率 * 物体的运动速度 = 0.32 * 150mm/s = 48mm/s,
曝光时间 = 像元尺寸 / 像的运动速度 = 4.65um / 48mm/s = 0.000097s = 97us,
最后曝光时间设置为100us即可。
香农采样定理,又称奈奎斯特采样定理,是通讯与信号处理领域的核心理论。该定理指出,为准确重构连续信号,采样频率须不低于原始信号最高频率的2倍(即fs≥2fmax)。其核心机制是通过离散采样点恢复带限信号,避免因采样不足导致频谱混叠。
相机选型
-
先选择相机
-
选择镜头; 即确认焦距,可以用简单的相似三角形公式,确认镜头焦距。
参考链接:
https://blog.csdn.net/qq_42957717/article/details/125508235
https://blog.csdn.net/u012572552/article/details/109694172
https://cloud.tencent.com/developer/article/2087786