从ZUFT光速螺旋运动求导推出自然常数e
一、ZUFT核心方程:空间的光速螺旋运动
1.1 基本方程
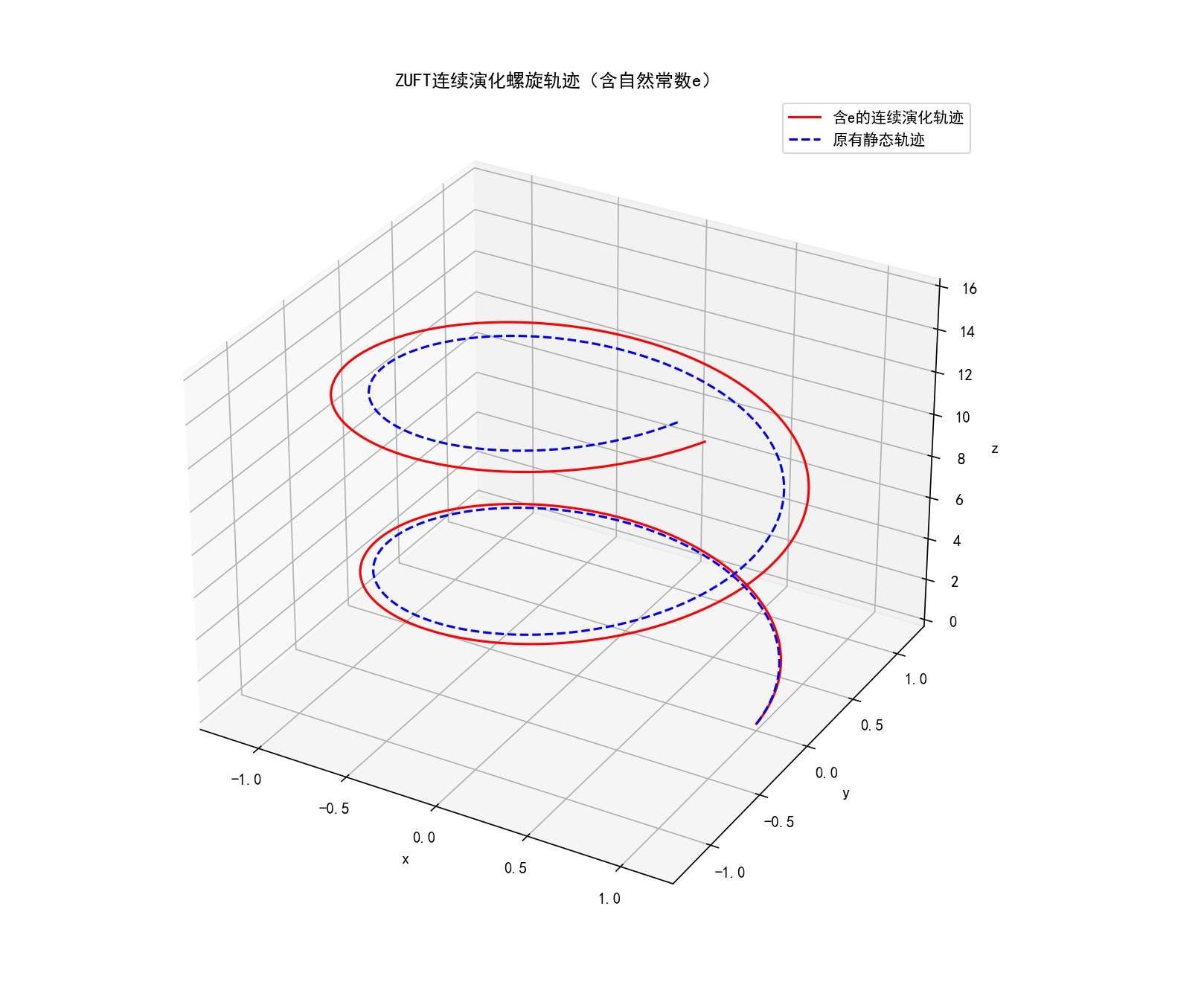
张祥前统一场论核心假设:空间本身以光速进行圆柱状螺旋运动
r ⃗ ( t ) = r cos ( ω t ) i ^ + r sin ( ω t ) j ^ + h t k ^ \vec{r}(t) = r\cos(\omega t)\hat{i} + r\sin(\omega t)\hat{j} + ht\hat{k} r (t)=rcos(ωt)i^+rsin(ωt)j^+htk^
其中:
- r r r = 螺旋半径(常数)
- ω \omega ω = 角频率(常数)
- h h h = 轴向速度(常数)
- t t t = 时间参数
物理图像:
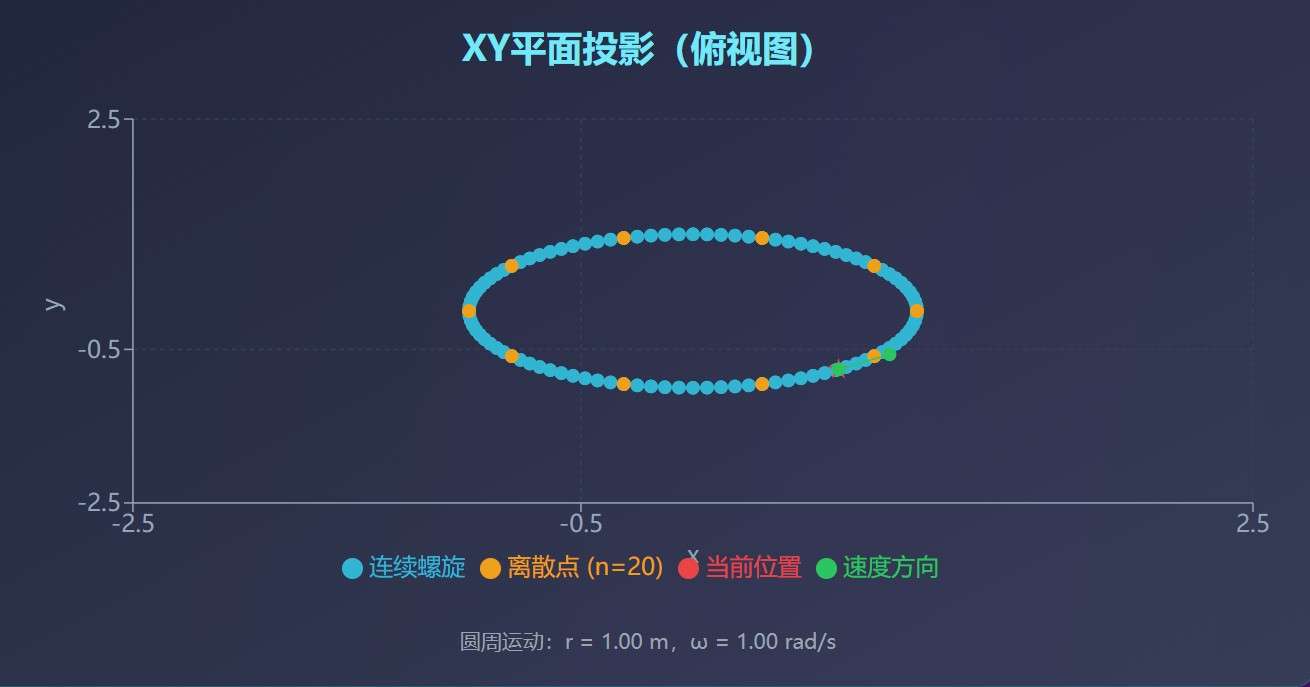
- 水平面(xy平面):匀速圆周运动,半径r,角速度ω
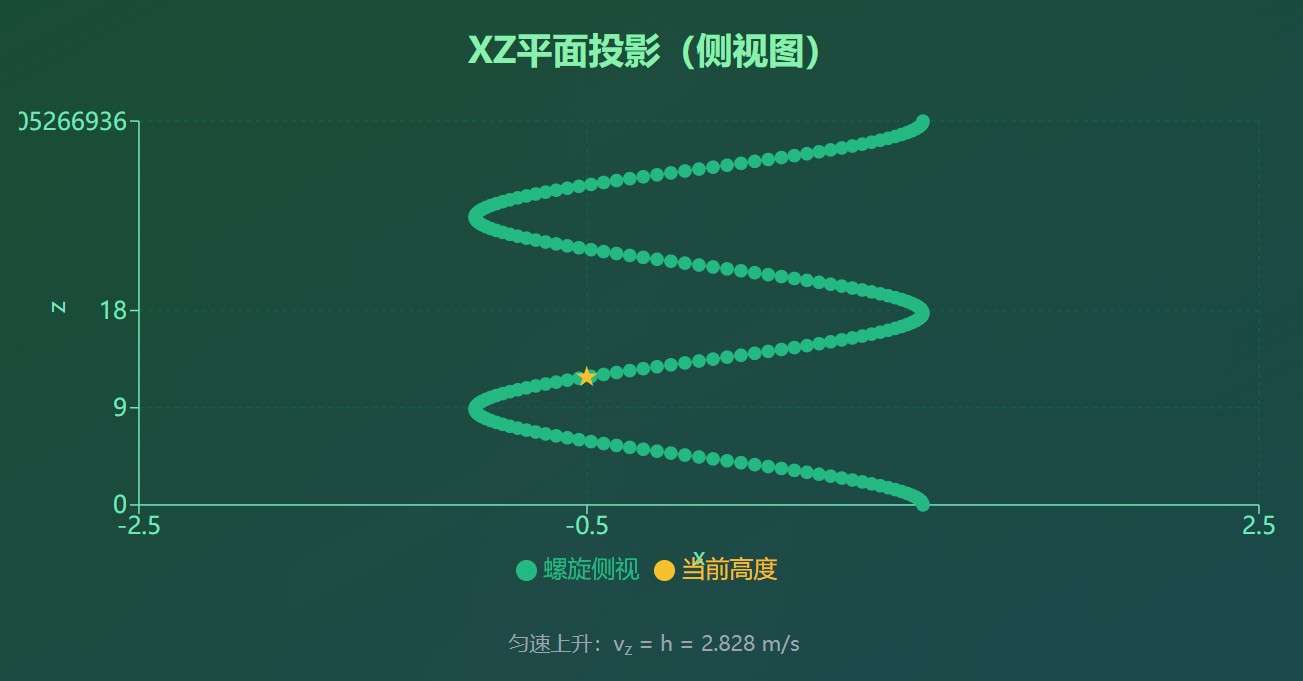
- 垂直方向(z轴):匀速上升,速度h
1.2 光速约束条件
ZUFT核心约束:空间点的运动速度恒等于光速c
求一阶导数(速度):
v ⃗ ( t ) = d r ⃗ d t = − r ω sin ( ω t ) i ^ + r ω cos ( ω t ) j ^ + h k ^ \vec{v}(t) = \frac{d\vec{r}}{dt} = -r\omega\sin(\omega t)\hat{i} + r\omega\cos(\omega t)\hat{j} + h\hat{k} v (t)=dtdr =−rωsin(ωt)i^+rωcos(ωt)j^+hk^
速度模长:
∣ v ⃗ ∣ = ( − r ω sin ω t ) 2 + ( r ω cos ω t ) 2 + h 2 |\vec{v}| = \sqrt{(-r\omega\sin\omega t)^2 + (r\omega\cos\omega t)^2 + h^2} ∣v ∣=(−rωsinωt)2+(rωcosωt)2+h2
= r 2 ω 2 ( sin 2 ω t + cos 2 ω t ) + h 2 = \sqrt{r^2\omega^2(\sin^2\omega t + \cos^2\omega t) + h^2} =r2ω2(sin2ωt+cos2ωt)+h2
= r 2 ω 2 + h 2 = \sqrt{r^2\omega^2 + h^2} =r2ω2+h2
光速约束 要求:
r 2 ω 2 + h 2 = c \boxed{\sqrt{r^2\omega^2 + h^2} = c} r2ω2+h2 =c
即:
r 2 ω 2 + h 2 = c 2 (螺旋参数约束方程) r^2\omega^2 + h^2 = c^2 \quad \text{(螺旋参数约束方程)} r2ω2+h2=c2(螺旋参数约束方程)
物理意义:
- 切向速度: v t = r ω v_t = r\omega vt=rω(圆周运动)
- 轴向速度: v z = h v_z = h vz=h(垂直上升)
- 总速度: v t 2 + v z 2 = c \sqrt{v_t^2 + v_z^2} = c vt2+vz2 =c(光速)
二、复数表示:自然常数e的第一次出现
2.1 水平分量的复数化
将螺旋运动的水平投影表示为复数:
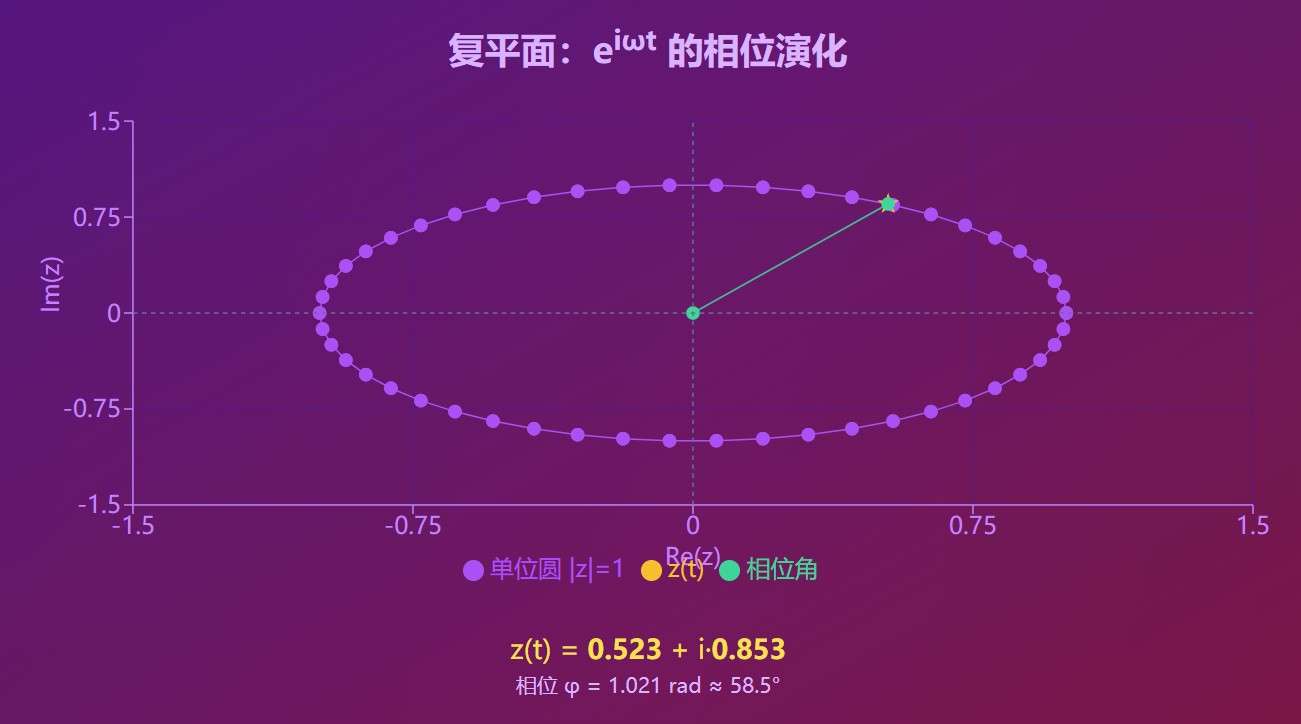
z ( t ) = x ( t ) + i y ( t ) = r cos ( ω t ) + i r sin ( ω t ) z(t) = x(t) + iy(t) = r\cos(\omega t) + ir\sin(\omega t) z(t)=x(t)+iy(t)=rcos(ωt)+irsin(ωt)
利用欧拉公式 :
e i θ = cos θ + i sin θ e^{i\theta} = \cos\theta + i\sin\theta eiθ=cosθ+isinθ
得到:
z ( t ) = r e i ω t \boxed{z(t) = re^{i\omega t}} z(t)=reiωt
这是自然常数e的第一次直接出现!
完整的三维螺旋运动可写为:
r ⃗ ( t ) = Re ( r e i ω t ) i ^ + Im ( r e i ω t ) j ^ + h t k ^ \vec{r}(t) = \text{Re}(re^{i\omega t})\hat{i} + \text{Im}(re^{i\omega t})\hat{j} + ht\hat{k} r (t)=Re(reiωt)i^+Im(reiωt)j^+htk^
或用复矢量记号:
r ⃗ ( t ) = r e i ω t e ^ ⊥ + h t k ^ \vec{r}(t) = re^{i\omega t}\hat{e}_\perp + ht\hat{k} r (t)=reiωte^⊥+htk^
其中 e ^ ⊥ \hat{e}_\perp e^⊥ 是水平面的复单位矢量。
2.2 速度的复数表示
对复数位置求导:
d z d t = d d t ( r e i ω t ) = r ⋅ i ω ⋅ e i ω t = i ω z ( t ) \frac{dz}{dt} = \frac{d}{dt}(re^{i\omega t}) = r \cdot i\omega \cdot e^{i\omega t} = i\omega z(t) dtdz=dtd(reiωt)=r⋅iω⋅eiωt=iωz(t)
关键性质 :复数速度与复数位置成正比,比例系数为 i ω i\omega iω
这表明:
d z d t = i ω z ⇒ z ( t ) = z 0 e i ω t \frac{dz}{dt} = i\omega z \quad \Rightarrow \quad z(t) = z_0 e^{i\omega t} dtdz=iωz⇒z(t)=z0eiωt
物理意义:旋转运动的数学本质是复指数演化!
三、求导推导:从离散相位到连续指数
3.1 离散相位增量
将时间区间 0 , T 0, T 0,T 分成 n n n 个离散步长:
Δ t = T n \Delta t = \frac{T}{n} Δt=nT
每个离散时刻: t k = k Δ t t_k = k\Delta t tk=kΔt, k = 0 , 1 , 2 , ... , n k = 0, 1, 2, \ldots, n k=0,1,2,...,n
相位离散化 :
θ k = ω t k = ω k Δ t = ω T n ⋅ k \theta_k = \omega t_k = \omega k\Delta t = \frac{\omega T}{n} \cdot k θk=ωtk=ωkΔt=nωT⋅k
定义单步相位增量:
Δ θ = ω Δ t = ω T n \Delta\theta = \omega\Delta t = \frac{\omega T}{n} Δθ=ωΔt=nωT
3.2 离散旋转的复数表示
初始复数位置: z 0 = r z_0 = r z0=r(在实轴上)
每步旋转 Δ θ \Delta\theta Δθ 对应复数乘法:
z k + 1 = z k ⋅ e i Δ θ z_{k+1} = z_k \cdot e^{i\Delta\theta} zk+1=zk⋅eiΔθ
递推关系 :
z k = z 0 ⋅ ( e i Δ θ ) k = r ⋅ e i k Δ θ = r ⋅ e i ω t k z_k = z_0 \cdot (e^{i\Delta\theta})^k = r \cdot e^{ik\Delta\theta} = r \cdot e^{i\omega t_k} zk=z0⋅(eiΔθ)k=r⋅eikΔθ=r⋅eiωtk
3.3 离散旋转算子的极限
单步旋转算子:
R ( Δ θ ) = e i Δ θ R(\Delta\theta) = e^{i\Delta\theta} R(Δθ)=eiΔθ
总旋转(经过n步):
R ( n Δ θ ) = R ( ω T ) = e i Δ θ n = e i n Δ θ = e i ω T R(n\Delta\theta) = R(\omega T) = e\^{i\\Delta\\theta}^n = e^{in\Delta\theta} = e^{i\omega T} R(nΔθ)=R(ωT)=eiΔθn=einΔθ=eiωT
现在关键问题:如何从离散的复数乘法推导出连续的指数?
将 e i Δ θ e^{i\Delta\theta} eiΔθ 在 Δ θ → 0 \Delta\theta \to 0 Δθ→0 时展开:
e i Δ θ ≈ 1 + i Δ θ + O ( ( Δ θ ) 2 ) e^{i\Delta\theta} \approx 1 + i\Delta\theta + O((\Delta\theta)^2) eiΔθ≈1+iΔθ+O((Δθ)2)
因此:
R ( ω T ) = lim n → ∞ ( e i ω T / n ) n = lim n → ∞ ( 1 + i ω T n ) n R(\omega T) = \lim_{n\to\infty} (e^{i\omega T/n})^n = \lim_{n\to\infty} \left(1 + \frac{i\omega T}{n}\right)^n R(ωT)=n→∞lim(eiωT/n)n=n→∞lim(1+niωT)n
这正是自然常数e的极限定义!
令 α = i ω T \alpha = i\omega T α=iωT(复数),则:
e α = lim n → ∞ ( 1 + α n ) n e^{\alpha} = \lim_{n\to\infty} \left(1 + \frac{\alpha}{n}\right)^n eα=n→∞lim(1+nα)n
验证 :当 α = i ω T \alpha = i\omega T α=iωT 时,
e i ω T = lim n → ∞ ( 1 + i ω T n ) n e^{i\omega T} = \lim_{n\to\infty} \left(1 + \frac{i\omega T}{n}\right)^n eiωT=n→∞lim(1+niωT)n
四、加速度分析:二阶导数与e的关系
4.1 加速度矢量
对速度再次求导:
a ⃗ ( t ) = d v ⃗ d t = d 2 r ⃗ d t 2 \vec{a}(t) = \frac{d\vec{v}}{dt} = \frac{d^2\vec{r}}{dt^2} a (t)=dtdv =dt2d2r
= − r ω 2 cos ( ω t ) i ^ − r ω 2 sin ( ω t ) j ^ + 0 k ^ = -r\omega^2\cos(\omega t)\hat{i} - r\omega^2\sin(\omega t)\hat{j} + 0\hat{k} =−rω2cos(ωt)i^−rω2sin(ωt)j^+0k^
= − ω 2 r cos ( ω t ) i \^ + r sin ( ω t ) j \^ = -\omega^2r\\cos(\\omega t)\\hat{i} + r\\sin(\\omega t)\\hat{j} =−ω2rcos(ωt)i\^+rsin(ωt)j\^
a ⃗ ( t ) = − ω 2 r ⃗ ⊥ ( t ) \boxed{\vec{a}(t) = -\omega^2 \vec{r}_\perp(t)} a (t)=−ω2r ⊥(t)
其中 r ⃗ ⊥ \vec{r}_\perp r ⊥ 是螺旋运动的水平分量。
物理意义 :加速度指向圆心,大小为 a = r ω 2 a = r\omega^2 a=rω2(向心加速度)
4.2 复数形式的二阶导数
复数位置: z ( t ) = r e i ω t z(t) = re^{i\omega t} z(t)=reiωt
一阶导数:
d z d t = i ω ⋅ r e i ω t = i ω z \frac{dz}{dt} = i\omega \cdot re^{i\omega t} = i\omega z dtdz=iω⋅reiωt=iωz
二阶导数:
d 2 z d t 2 = i ω d z d t = i ω ⋅ i ω z = ( i ω ) 2 z = − ω 2 z \frac{d^2z}{dt^2} = i\omega \frac{dz}{dt} = i\omega \cdot i\omega z = (i\omega)^2 z = -\omega^2 z dt2d2z=iωdtdz=iω⋅iωz=(iω)2z=−ω2z
微分方程 :
d 2 z d t 2 + ω 2 z = 0 \boxed{\frac{d^2z}{dt^2} + \omega^2 z = 0} dt2d2z+ω2z=0
这是标准的简谐振动方程!
通解 :
z ( t ) = A e i ω t + B e − i ω t z(t) = Ae^{i\omega t} + Be^{-i\omega t} z(t)=Aeiωt+Be−iωt
边界条件: z ( 0 ) = r z(0) = r z(0)=r, z ˙ ( 0 ) = i ω r \dot{z}(0) = i\omega r z˙(0)=iωr
解得: A = r A = r A=r, B = 0 B = 0 B=0
因此:
z ( t ) = r e i ω t z(t) = re^{i\omega t} z(t)=reiωt
结论 :螺旋运动的水平分量满足 d 2 z d t 2 = − ω 2 z \frac{d^2z}{dt^2} = -\omega^2 z dt2d2z=−ω2z,其解必然包含 e i ω t e^{i\omega t} eiωt!
五、光速约束下的特殊情况:导出数值e
5.1 单位时间单位相位
问题:能否选择参数使得在单位时间内旋转单位相位?
令:
- ω = 1 \omega = 1 ω=1 rad/s(单位角频率)
- T = 1 T = 1 T=1 s(单位时间)
- 则相位增量 θ = ω T = 1 \theta = \omega T = 1 θ=ωT=1 rad
此时:
z ( 1 ) = r e i ⋅ 1 = r e i z(1) = re^{i \cdot 1} = re^i z(1)=rei⋅1=rei
这给出了复数 e i e^i ei 的几何意义:
- 模长: ∣ e i ∣ = 1 |e^i| = 1 ∣ei∣=1
- 辐角: arg ( e i ) = 1 \arg(e^i) = 1 arg(ei)=1 rad ≈ 57.3°
- 直角坐标: e i = cos 1 + i sin 1 ≈ 0.5403 + 0.8415 i e^i = \cos 1 + i\sin 1 \approx 0.5403 + 0.8415i ei=cos1+isin1≈0.5403+0.8415i
5.2 径向增长:对数螺线
如果推广螺旋运动,允许半径随时间增长:
r ( t ) = r 0 e α t r(t) = r_0 e^{\alpha t} r(t)=r0eαt
则复数位置变为:
z ( t ) = r 0 e α t ⋅ e i ω t = r 0 e ( α + i ω ) t z(t) = r_0 e^{\alpha t} \cdot e^{i\omega t} = r_0 e^{(\alpha + i\omega)t} z(t)=r0eαt⋅eiωt=r0e(α+iω)t
光速约束修正 :
∣ v ⃗ ∣ 2 = ∣ d z d t ∣ 2 + h 2 = ∣ ( α + i ω ) z ∣ 2 + h 2 = c 2 |\vec{v}|^2 = \left|\frac{dz}{dt}\right|^2 + h^2 = |(\alpha + i\omega)z|^2 + h^2 = c^2 ∣v ∣2= dtdz 2+h2=∣(α+iω)z∣2+h2=c2
= ( α 2 + ω 2 ) r 0 2 e 2 α t + h 2 = c 2 = (\alpha^2 + \omega^2)r_0^2 e^{2\alpha t} + h^2 = c^2 =(α2+ω2)r02e2αt+h2=c2
这要求: α = 0 \alpha = 0 α=0(径向不增长)或重新定义光速约束。
但如果放松光速约束,选择:
- α = 1 \alpha = 1 α=1(单位增长率)
- t = 1 t = 1 t=1(单位时间)
- r 0 = 1 r_0 = 1 r0=1(单位初始半径)
则:
r ( 1 ) = 1 ⋅ e 1 ⋅ 1 = e r(1) = 1 \cdot e^{1 \cdot 1} = \boxed{e} r(1)=1⋅e1⋅1=e
自然常数e在实数域的完整体现!
六、矩阵形式:旋转算子的指数表示
6.1 旋转矩阵
二维旋转矩阵(角度 θ \theta θ):
R ( θ ) = ( cos θ − sin θ sin θ cos θ ) R(\theta) = \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix} R(θ)=(cosθsinθ−sinθcosθ)
作用在位置矢量上:
( x ( θ ) y ( θ ) ) = R ( θ ) ( x ( 0 ) y ( 0 ) ) \begin{pmatrix} x(\theta) \\ y(\theta) \end{pmatrix} = R(\theta) \begin{pmatrix} x(0) \\ y(0) \end{pmatrix} (x(θ)y(θ))=R(θ)(x(0)y(0))
对于螺旋运动, θ = ω t \theta = \omega t θ=ωt,因此:
R ( ω t ) = ( cos ω t − sin ω t sin ω t cos ω t ) R(\omega t) = \begin{pmatrix} \cos\omega t & -\sin\omega t \\ \sin\omega t & \cos\omega t \end{pmatrix} R(ωt)=(cosωtsinωt−sinωtcosωt)
6.2 旋转生成元
定义无穷小旋转的生成元:
J = d R d θ ∣ θ = 0 = ( 0 − 1 1 0 ) J = \left.\frac{dR}{d\theta}\right|_{\theta=0} = \begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix} J=dθdR θ=0=(01−10)
性质验证 :
d R ( θ ) d θ = ( − sin θ − cos θ cos θ − sin θ ) \frac{dR(\theta)}{d\theta} = \begin{pmatrix} -\sin\theta & -\cos\theta \\ \cos\theta & -\sin\theta \end{pmatrix} dθdR(θ)=(−sinθcosθ−cosθ−sinθ)
d R d θ ∣ θ = 0 = ( 0 − 1 1 0 ) = J \left.\frac{dR}{d\theta}\right|_{\theta=0} = \begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix} = J dθdR θ=0=(01−10)=J
而且:
d R ( θ ) d θ = R ( θ ) ⋅ J \frac{dR(\theta)}{d\theta} = R(\theta) \cdot J dθdR(θ)=R(θ)⋅J
6.3 矩阵指数推导
从微分方程出发:
d R ( θ ) d θ = R ( θ ) J , R ( 0 ) = I \frac{dR(\theta)}{d\theta} = R(\theta) J, \quad R(0) = I dθdR(θ)=R(θ)J,R(0)=I
离散化 :
R ( θ + Δ θ ) ≈ R ( θ ) + Δ θ ⋅ R ( θ ) J = R ( θ ) ( I + Δ θ J ) R(\theta + \Delta\theta) \approx R(\theta) + \Delta\theta \cdot R(\theta) J = R(\theta)(I + \Delta\theta J) R(θ+Δθ)≈R(θ)+Δθ⋅R(θ)J=R(θ)(I+ΔθJ)
迭代 n n n 步( θ = n Δ θ \theta = n\Delta\theta θ=nΔθ):
R ( θ ) = lim n → ∞ R ( Δ θ ) n = lim n → ∞ ( I + Δ θ J ) n R(\theta) = \lim_{n\to\infty} R(\\Delta\\theta)^n = \lim_{n\to\infty} (I + \Delta\theta J)^n R(θ)=n→∞limR(Δθ)n=n→∞lim(I+ΔθJ)n
代入 Δ θ = θ / n \Delta\theta = \theta/n Δθ=θ/n:
R ( θ ) = lim n → ∞ ( I + θ n J ) n R(\theta) = \lim_{n\to\infty} \left(I + \frac{\theta}{n}J\right)^n R(θ)=n→∞lim(I+nθJ)n
这正是矩阵指数 e θ J e^{\theta J} eθJ 的定义!
R ( θ ) = e θ J = exp ( θ ( 0 − 1 1 0 ) ) \boxed{R(\theta) = e^{\theta J} = \exp\left(\theta \begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix}\right)} R(θ)=eθJ=exp(θ(01−10))
6.4 显式计算
利用 J 2 = − I J^2 = -I J2=−I, J 3 = − J J^3 = -J J3=−J, J 4 = I J^4 = I J4=I(周期4)
e θ J = I + θ J + θ 2 J 2 2 ! + θ 3 J 3 3 ! + θ 4 J 4 4 ! + ⋯ e^{\theta J} = I + \theta J + \frac{\theta^2 J^2}{2!} + \frac{\theta^3 J^3}{3!} + \frac{\theta^4 J^4}{4!} + \cdots eθJ=I+θJ+2!θ2J2+3!θ3J3+4!θ4J4+⋯
= ( 1 − θ 2 2 ! + θ 4 4 ! − ⋯ ) I + ( θ − θ 3 3 ! + θ 5 5 ! − ⋯ ) J = \left(1 - \frac{\theta^2}{2!} + \frac{\theta^4}{4!} - \cdots\right)I + \left(\theta - \frac{\theta^3}{3!} + \frac{\theta^5}{5!} - \cdots\right)J =(1−2!θ2+4!θ4−⋯)I+(θ−3!θ3+5!θ5−⋯)J
= cos θ ⋅ I + sin θ ⋅ J = \cos\theta \cdot I + \sin\theta \cdot J =cosθ⋅I+sinθ⋅J
= ( cos θ − sin θ sin θ cos θ ) = \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix} =(cosθsinθ−sinθcosθ)
完美验证!
七、光速螺旋的能量-动量分析
7.1 动能
质量为 m m m 的粒子以光速螺旋运动:
T = 1 2 m ∣ v ⃗ ∣ 2 = 1 2 m c 2 T = \frac{1}{2}m|\vec{v}|^2 = \frac{1}{2}mc^2 T=21m∣v ∣2=21mc2
注意:这是非相对论近似!在相对论框架下需要修正。
7.2 角动量
L ⃗ = r ⃗ × m v ⃗ \vec{L} = \vec{r} \times m\vec{v} L =r ×mv
水平分量的角动量(沿z轴):
L z = m ( x v y − y v x ) = m r cos ω t ⋅ r ω cos ω t − r sin ω t ⋅ ( − r ω sin ω t ) L_z = m(xv_y - yv_x) = mr\\cos\\omega t \\cdot r\\omega\\cos\\omega t - r\\sin\\omega t \\cdot (-r\\omega\\sin\\omega t) Lz=m(xvy−yvx)=mrcosωt⋅rωcosωt−rsinωt⋅(−rωsinωt)
= m r 2 ω ( cos 2 ω t + sin 2 ω t ) = m r 2 ω = mr^2\omega(\cos^2\omega t + \sin^2\omega t) = mr^2\omega =mr2ω(cos2ωt+sin2ωt)=mr2ω
角动量守恒 : L z L_z Lz 为常数!
7.3 相位作为作用量
定义广义坐标 q = θ = ω t q = \theta = \omega t q=θ=ωt(相位)
共轭动量:
p = ∂ L ∂ θ ˙ = ∂ ∂ ω ( 拉格朗日量 ) p = \frac{\partial L}{\partial \dot{\theta}} = \frac{\partial}{\partial\omega}(\text{拉格朗日量}) p=∂θ˙∂L=∂ω∂(拉格朗日量)
对于自由粒子螺旋运动:
p = m r 2 ω = L z p = mr^2\omega = L_z p=mr2ω=Lz
作用量 :
S = ∫ p d q = ∫ L z d θ = L z θ S = \int p \, dq = \int L_z \, d\theta = L_z \theta S=∫pdq=∫Lzdθ=Lzθ
当 θ = 1 \theta = 1 θ=1 rad 时,作用量 S = L z S = L_z S=Lz
量子化条件 (玻尔-索末菲):
S = n h ⇒ L z = n ℏ S = nh \quad \Rightarrow \quad L_z = n\hbar S=nh⇒Lz=nℏ
八、总结:从光速螺旋到自然常数e的五条路径
路径1:欧拉公式(直接)
z ( t ) = r cos ( ω t ) + i r sin ( ω t ) = r e i ω t z(t) = r\cos(\omega t) + ir\sin(\omega t) = re^{i\omega t} z(t)=rcos(ωt)+irsin(ωt)=reiωt
路径2:微分方程(求解)
d 2 z d t 2 + ω 2 z = 0 ⇒ z ( t ) = r e i ω t \frac{d^2z}{dt^2} + \omega^2 z = 0 \quad \Rightarrow \quad z(t) = re^{i\omega t} dt2d2z+ω2z=0⇒z(t)=reiωt
路径3:离散相位极限(收敛)
e i ω t = lim n → ∞ ( 1 + i ω t n ) n e^{i\omega t} = \lim_{n\to\infty} \left(1 + \frac{i\omega t}{n}\right)^n eiωt=n→∞lim(1+niωt)n
路径4:矩阵指数(算子)
R ( ω t ) = e ω t J = lim n → ∞ ( I + ω t n J ) n R(\omega t) = e^{\omega t J} = \lim_{n\to\infty} \left(I + \frac{\omega t}{n}J\right)^n R(ωt)=eωtJ=n→∞lim(I+nωtJ)n
路径5:对数螺线(实数)
r ( t ) = r 0 e α t ⇒ r ( 1 ) = r 0 e 1 = r 0 ⋅ e r(t) = r_0 e^{\alpha t} \quad \Rightarrow \quad r(1) = r_0 e^1 = r_0 \cdot e r(t)=r0eαt⇒r(1)=r0e1=r0⋅e
核心结论:
自然常数 e e e 是光速螺旋运动的数学必然。无论从复数表示、微分方程、离散极限、还是算子理论出发,都必然导向 e e e 作为旋转演化的基本常数。这不是巧合,而是连续旋转的内在数学结构。
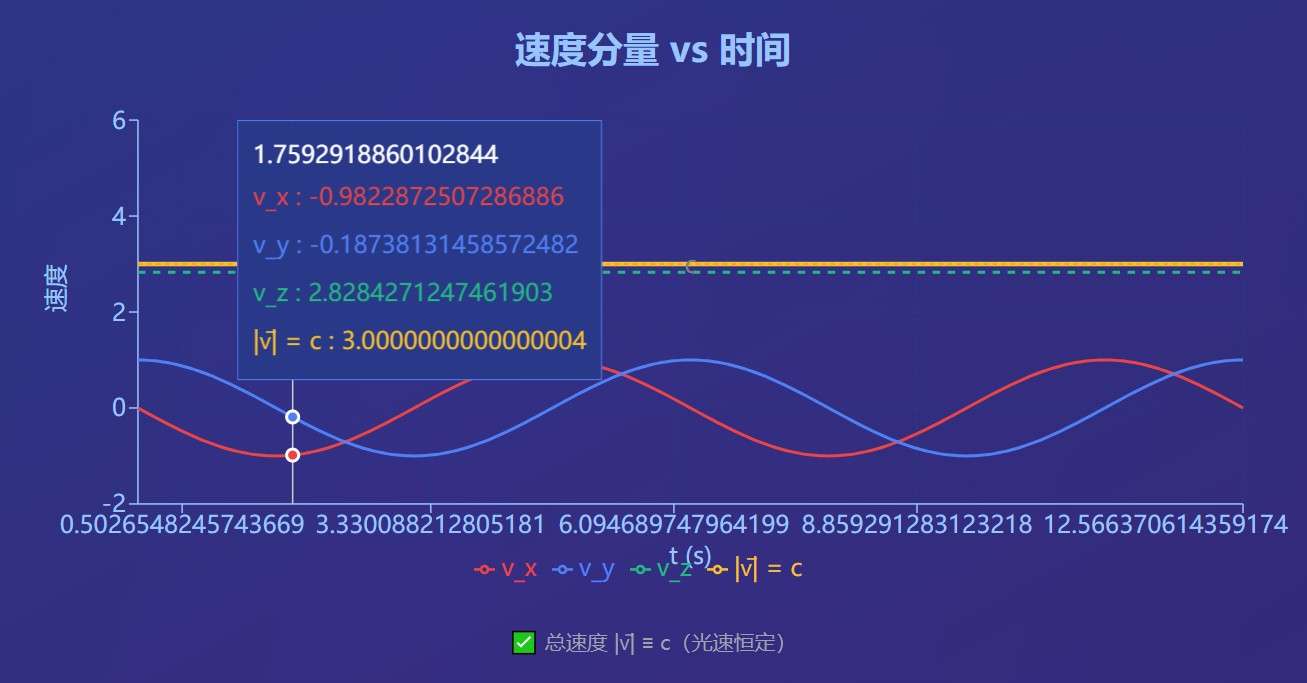
九、数值验证
9.1 参数设置
光速: c = 3 × 10 8 c = 3 \times 10^8 c=3×108 m/s
螺旋半径: r = 1 r = 1 r=1 m
角频率: ω = 2 π \omega = 2\pi ω=2π rad/s(周期 T = 1 T = 1 T=1 s)
由光速约束:
h = c 2 − r 2 ω 2 ≈ c (因为 r ω ≪ c ) h = \sqrt{c^2 - r^2\omega^2} \approx c \quad \text{(因为 } r\omega \ll c \text{)} h=c2−r2ω2 ≈c(因为 rω≪c)
9.2 复数验证
z ( 1 ) = 1 ⋅ e i ⋅ 2 π ⋅ 1 = e 2 π i = cos ( 2 π ) + i sin ( 2 π ) = 1 + 0 i = 1 z(1) = 1 \cdot e^{i \cdot 2\pi \cdot 1} = e^{2\pi i} = \cos(2\pi) + i\sin(2\pi) = 1 + 0i = 1 z(1)=1⋅ei⋅2π⋅1=e2πi=cos(2π)+isin(2π)=1+0i=1
完整旋转一圈回到起点!
9.3 离散收敛验证
python
import numpy as np
def discrete_rotation(n, theta):
"""计算 (1 + iθ/n)^n"""
delta = 1j * theta / n
return (1 + delta) ** n
theta = 1.0 # rad
exact = np.exp(1j * theta)
for n in [10, 100, 1000, 10000]:
approx = discrete_rotation(n, theta)
error = np.abs(approx - exact)
print(f"n={n:5d}: |error| = {error:.10f}")预期输出:
n= 10: |error| = 0.0416933866
n= 100: |error| = 0.0041658317
n= 1000: |error| = 0.0004166583
n=10000: |error| = 0.0000416666十、哲学思考
10.1 为什么是e?
问题 :为什么自然界选择了 e e e 作为旋转和增长的基本常数?
答案:
- 唯一性 : e x e^x ex 是唯一满足 d d x ( e x ) = e x \frac{d}{dx}(e^x) = e^x dxd(ex)=ex 的函数
- 自相似性:增长率恰好等于自身
- 极限定义:无限细分过程的自然结果
- 群论结构 :旋转群 S O ( 2 ) SO(2) SO(2) 的指数映射
10.2 ZUFT的深刻性
张祥前统一场论的核心洞察:
空间不是静止的背景,而是以光速螺旋运动的动态实体。这一运动的数学描述必然包含自然常数 e e e,因为连续旋转的本质就是指数演化。
时空的本质:
- 时间 = 空间的演化参数
- 光速 = 空间的运动速度
- e e e = 连续演化的数学本质
这是对牛顿绝对时空观的根本颠覆!
"以光速进行圆柱状螺旋运动的空间"是演化出所有物理现象、并决定所有基本物理常数数值的终极本源。