作为C++开发的视觉工程师,日常开发的相机驱动、视觉检测、特征提取等节点,核心痛点是资源管控复杂(相机句柄、模型内存、GPU资源)、故障恢复难、远程协同管控缺标准------而ROS2生命周期节点(Lifecycle Node)正是为解决这些问题设计的核心特性。
一、核心定位
普通ROS2节点只有"运行/停止"两种状态,启动时一次性加载所有资源(相机、模型、参数),停止时强制释放,在视觉场景中会暴露三大问题:
- 初始化容错低:相机内参加载失败、模型文件损坏会直接导致节点崩溃,无法单独排查参数/硬件问题;
- 资源管控粗放:机器人待机时,视觉节点仍占用相机、GPU资源,功耗高且易导致设备过热;
- 远程交互无标准:上位机无法精准控制"加载模型→启动推理→暂停推理"等阶段,只能通过自定义话题/服务实现,兼容性差。
生命周期节点的核心价值是将节点生命周期拆分为可管控、可校验、可回滚的标准化状态,每个状态对应明确的资源操作(如"加载参数""启动采集""释放模型"),且内置标准化服务接口,完美适配视觉节点"多阶段、高资源依赖、需精准管控"的特性。
二、标准状态与合法转换规则
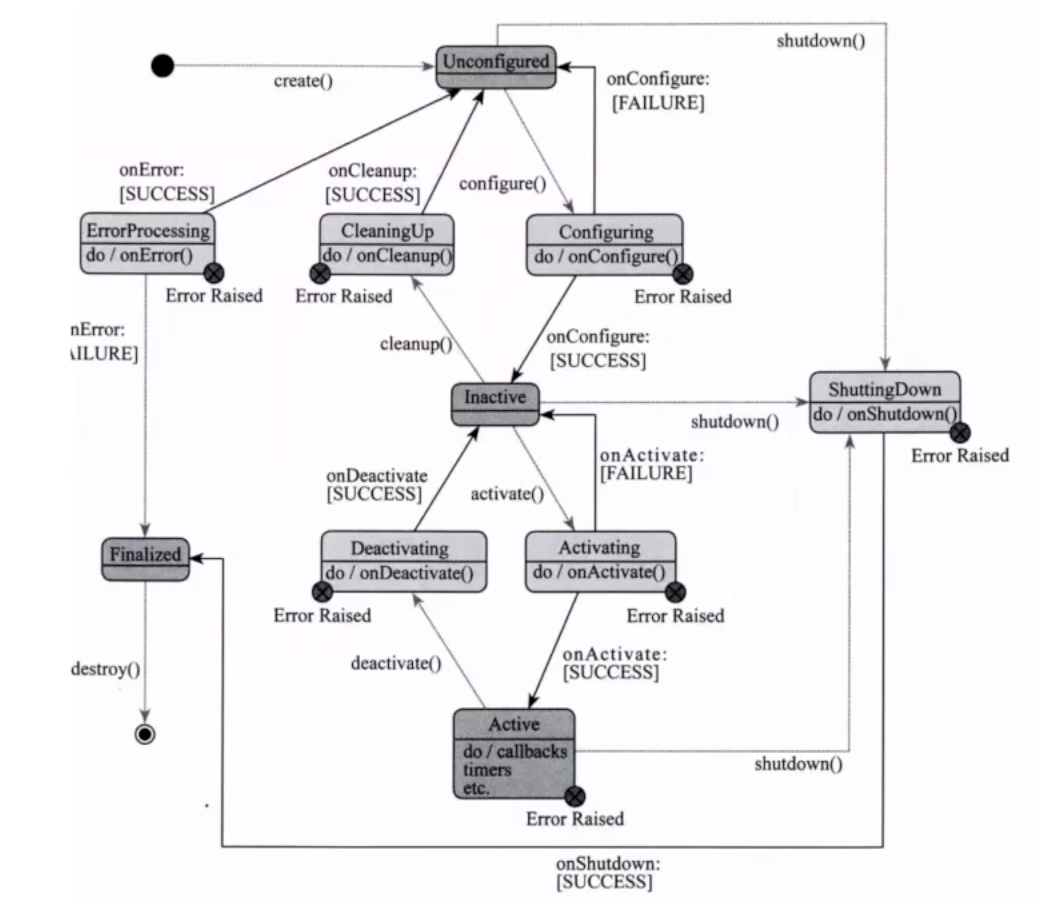
ROS2生命周期节点定义了9个核心状态 和12种合法状态转换(非合法转换会直接失败),是所有开发的基础,需牢记:
| 状态名称 | 核心特征(结合视觉开发场景举例) |
|---|---|
| Unconfigured | 节点启动,仅加载基础框架,无任何视觉资源(相机/模型/参数) |
| Configuring | 执行配置逻辑(加载相机内参、模型路径、GPU参数),未启动业务逻辑 |
| Inactive | 配置完成,视觉资源初始化完成(相机句柄创建、模型加载到内存),但未执行采集/推理 |
| Activating | 启动核心业务(相机开始采集、推理线程启动) |
| Active | 正常运行(发布图像话题、输出检测结果) |
| Deactivating | 暂停核心业务(停止采集/推理,保留相机/模型资源) |
| CleaningUp | 清理配置(释放相机句柄、卸载模型、清空参数) |
| Finalized | 最终化(释放所有资源,节点退出) |
| Error | 异常状态(相机断开、模型推理出错),需手动/自动恢复 |
关键合法转换(视觉场景高频)
- Unconfigured → Configuring → Inactive(基础配置流程);
- Inactive → Activating → Active(启动视觉业务);
- Active → Deactivating → Inactive(暂停视觉业务,保留资源);
- Inactive → CleaningUp → Unconfigured(清理资源,可重新配置);
- 任意状态 → Error(异常触发)→ Unconfigured/Finalized(恢复/退出);
- 任意状态 → Finalized(强制退出)。
核心原则:状态转换是原子性的,视觉场景中需避免"Activating状态下强制断开相机"等操作,否则会导致资源泄漏。
三、C++核心API(rclcpp_lifecycle)
ROS2提供rclcpp_lifecycle库实现生命周期节点,核心类和接口如下(以C++视觉开发举例):
1. 基类:rclcpp_lifecycle::LifecycleNode
继承自rclcpp::Node,是所有生命周期节点的基类,核心构造函数:
cpp
// 视觉节点示例构造函数
class VisionLifecycleNode : public rclcpp_lifecycle::LifecycleNode {
public:
VisionLifecycleNode() : LifecycleNode("vision_lifecycle_node",
//打破 ROS2 "参数必须先声明后使用" 的强制规则,让节点可以灵活处理 "未提前定义" 的参数(适配视觉节点中 "参数类型多、动态新增、硬件差异化" 的问题)
rclcpp::NodeOptions().allow_undeclared_parameters(true)) {
// 仅初始化日志、基础参数,不加载视觉资源
logger_ = this->get_logger();
}
private:
rclcpp::Logger logger_;
cv::VideoCapture cap_; // 相机句柄
std::shared_ptr<Ort::Session> model_session_; // ONNX模型会话(视觉推理)
};2. 核心回调函数
所有回调函数返回CallbackReturn(SUCCESS/FAILURE/ERROR),决定状态转换是否成功:
| 回调函数 | 触发时机 | 视觉场景实现逻辑 |
|---|---|---|
| on_configure() | Unconfigured→Configuring | 加载相机内参(从参数服务器读取)、初始化相机句柄、加载ONNX模型到内存 |
| on_activate() | Inactive→Activating | 启动相机采集线程、开启推理线程、激活生命周期发布器(发布图像/检测结果) |
| on_deactivate() | Active→Deactivating | 停止采集/推理线程、暂停图像发布(保留相机/模型资源) |
| on_cleanup() | Inactive→CleaningUp | 释放相机句柄、卸载模型、清空GPU缓存 |
| on_shutdown() | 任意状态→Finalized | 紧急释放所有资源(如机器人急停时) |
| on_error() | 任意状态→Error | 记录异常日志(如相机断开原因)、尝试自动恢复(重新连接相机) |
| on_state_transition() | 状态转换前后 | 记录状态转换日志(用于视觉节点故障溯源) |
3. 生命周期感知的通信组件
视觉节点高频使用LifecyclePublisher(普通Publisher无状态管控,激活前发布会失败):
cpp
// 声明生命周期发布器(发布检测结果)
using LifecyclePublisher = rclcpp_lifecycle::LifecyclePublisher;
LifecyclePublisher<sensor_msgs::msg::Image>::SharedPtr img_pub_;
LifecyclePublisher<vision_msgs::msg::Detection2DArray>::SharedPtr det_pub_;
// 在on_configure中初始化
img_pub_ = this->create_lifecycle_publisher<sensor_msgs::msg::Image>("camera/image_raw", 10);
det_pub_ = this->create_lifecycle_publisher<vision_msgs::msg::Detection2DArray>("vision/detections", 10);
// 在on_activate中激活(仅激活后才会真正发布消息)
img_pub_->on_activate();
det_pub_->on_activate();4. 状态查询API
用于实时获取节点状态(如上位机监控视觉节点是否正常):
cpp
// 获取当前状态
auto current_state = this->get_current_state();
RCLCPP_INFO(logger_, "当前状态:%s", current_state.label().c_str());
// 获取可用的状态转换
auto transitions = this->get_available_transitions();
for (auto &t : transitions) {
RCLCPP_INFO(logger_, "可转换至:%s", t.label.c_str());
}四、视觉场景实战:相机+检测节点完整实现
cpp
#include "rclcpp/rclcpp.hpp"
#include "rclcpp_lifecycle/lifecycle_node.hpp"
#include "rclcpp_lifecycle/lifecycle_publisher.hpp"
#include "sensor_msgs/msg/image.hpp"
#include "vision_msgs/msg/detection2d_array.hpp"
#include <opencv2/opencv.hpp>
#include <onnxruntime_cxx_api.h>
using namespace rclcpp_lifecycle;
using lifecycle_msgs::msg::Transition;
using CallbackReturn = LifecycleNode::CallbackReturn;
class VisionLifecycleNode : public LifecycleNode {
public:
VisionLifecycleNode() : LifecycleNode("vision_lifecycle_node") {
// 声明参数(相机ID、模型路径、内参文件)
this->declare_parameter<int>("camera_id", 0);
this->declare_parameter<std::string>("model_path", "detector.onnx");
this->declare_parameter<std::string>("calib_file", "camera_calib.yaml");
}
// 1. 配置阶段:加载参数、初始化资源(不启动业务)
CallbackReturn on_configure(const State &previous_state) {
RCLCPP_INFO(get_logger(), "进入配置阶段:加载视觉资源");
// 读取参数
int camera_id = this->get_parameter("camera_id").as_int();
std::string model_path = this->get_parameter("model_path").as_string();
std::string calib_file = this->get_parameter("calib_file").as_string();
// 加载相机内参
cv::FileStorage fs(calib_file, cv::FileStorage::READ);
if (!fs.isOpened()) {
RCLCPP_ERROR(get_logger(), "内参文件加载失败:%s", calib_file.c_str());
return CallbackReturn::FAILURE;
}
fs["camera_matrix"] >> camera_matrix_;
fs.release();
// 初始化相机
cap_.open(camera_id);
if (!cap_.isOpened()) {
RCLCPP_ERROR(get_logger(), "相机打开失败:ID=%d", camera_id);
return CallbackReturn::FAILURE;
}
// 加载ONNX模型
try {
Ort::Env env(ORT_LOGGING_LEVEL_WARNING, "VisionModel");
Ort::SessionOptions session_options;
session_options.SetIntraOpNumThreads(4); // GPU/CPU线程数
model_session_ = std::make_shared<Ort::Session>(env, model_path.c_str(), session_options);
} catch (const std::exception &e) {
RCLCPP_ERROR(get_logger(), "模型加载失败:%s", e.what());
return CallbackReturn::FAILURE;
}
// 初始化生命周期发布器
img_pub_ = create_lifecycle_publisher<sensor_msgs::msg::Image>("camera/image_raw", 10);
det_pub_ = create_lifecycle_publisher<vision_msgs::msg::Detection2DArray>("vision/detections", 10);
RCLCPP_INFO(get_logger(), "配置完成:相机/模型/内参加载成功");
return CallbackReturn::SUCCESS;
}
// 2. 激活阶段:启动采集/推理
CallbackReturn on_activate(const State &previous_state) {
RCLCPP_INFO(get_logger(), "激活节点:启动视觉业务");
// 激活发布器(仅激活后才会发布消息)
img_pub_->on_activate();
det_pub_->on_activate();
// 启动采集线程(视觉场景核心:循环采集+推理)
is_running_ = true;
capture_thread_ = std::thread(&VisionLifecycleNode::capture_and_infer, this);
return CallbackReturn::SUCCESS;
}
// 3. 去激活阶段:暂停采集/推理
CallbackReturn on_deactivate(const State &previous_state) {
RCLCPP_INFO(get_logger(), "去激活节点:暂停视觉业务");
// 停止采集线程
is_running_ = false;
if (capture_thread_.joinable()) {
capture_thread_.join();
}
// 暂停发布器
img_pub_->on_deactivate();
det_pub_->on_deactivate();
return CallbackReturn::SUCCESS;
}
// 4. 清理阶段:释放资源
CallbackReturn on_cleanup(const State &previous_state) {
RCLCPP_INFO(get_logger(), "清理资源:释放相机/模型");
// 释放相机
if (cap_.isOpened()) {
cap_.release();
}
// 释放模型
model_session_.reset();
camera_matrix_ = cv::Mat();
return CallbackReturn::SUCCESS;
}
// 5. 错误处理:异常恢复
CallbackReturn on_error(const State &previous_state) {
RCLCPP_ERROR(get_logger(), "进入错误状态:尝试恢复");
// 清理资源后返回未配置状态
on_cleanup(previous_state);
return CallbackReturn::SUCCESS;
}
private:
// 视觉资源
cv::VideoCapture cap_;
cv::Mat camera_matrix_;
std::shared_ptr<Ort::Session> model_session_;
// 通信组件
LifecyclePublisher<sensor_msgs::msg::Image>::SharedPtr img_pub_;
LifecyclePublisher<vision_msgs::msg::Detection2DArray>::SharedPtr det_pub_;
// 业务控制
std::thread capture_thread_;
std::atomic<bool> is_running_{false};
// 采集+推理核心函数
void capture_and_infer() {
cv::Mat frame;
while (is_running_ && rclcpp::ok()) {
// 采集图像
cap_ >> frame;
if (frame.empty()) {
RCLCPP_WARN(get_logger(), "图像采集为空,进入错误状态");
this->trigger_transition(Transition::TRANSITION_ON_ERROR); // 触发错误转换
break;
}
// 图像消息封装(省略:cv::Mat转sensor_msgs::msg::Image)
auto img_msg = std::make_unique<sensor_msgs::msg::Image>();
// ... 填充img_msg(编码、宽高、数据)
img_pub_->publish(std::move(img_msg));//通过move避免publish对img_msg进行深拷贝
// 模型推理(省略:ONNX Runtime推理逻辑)
auto det_msg = std::make_unique<vision_msgs::msg::Detection2DArray>();
// ... 填充检测结果
det_pub_->publish(std::move(det_msg));
cv::waitKey(10); // 10ms帧率控制
}
}
};
int main(int argc, char *argv[]) {
rclcpp::init(argc, argv);
auto node = std::make_shared<VisionLifecycleNode>();
// 生命周期节点需用spin循环(支持状态转换)
rclcpp::spin(node->get_node_base_interface());
rclcpp::shutdown();
return 0;
}五、状态控制方式
作为视觉工程师,需掌握三种主流的状态控制方式,适配机器人系统集成:
1. 命令行控制(调试/手动操作)
ROS2内置ros2 lifecycle命令,直接控制视觉节点:
bash
# 查看视觉节点当前状态
ros2 lifecycle get /vision_lifecycle_node
# 配置节点(加载相机/模型)
ros2 lifecycle set /vision_lifecycle_node configure
# 激活节点(启动采集/推理)
ros2 lifecycle set /vision_lifecycle_node activate
# 暂停节点(停止采集/推理)
ros2 lifecycle set /vision_lifecycle_node deactivate
# 清理资源
ros2 lifecycle set /vision_lifecycle_node cleanup
# 强制退出
ros2 lifecycle set /vision_lifecycle_node shutdown2. C++服务调用(远程自动控制)
通过调用生命周期节点的标准化服务(lifecycle_msgs/srv/ChangeState),实现上位机/其他节点控制视觉节点:
cpp
// 控制视觉节点激活的客户端示例
#include "rclcpp/rclcpp.hpp"
#include "lifecycle_msgs/srv/change_state.hpp"
int main(int argc, char *argv[]) {
rclcpp::init(argc, argv);
auto client_node = rclcpp::Node::make_shared("vision_controller");
auto client = client_node->create_client<lifecycle_msgs::srv::ChangeState>("/vision_lifecycle_node/change_state");
// 等待服务可用
while (!client->wait_for_service(std::chrono::seconds(5))) {
RCLCPP_INFO(client_node->get_logger(), "等待视觉节点服务可用...");
}
// 构造请求:激活节点(TRANSITION_ACTIVATE=3)
auto request = std::make_shared<lifecycle_msgs::srv::ChangeState::Request>();
request->transition.id = lifecycle_msgs::msg::Transition::TRANSITION_ACTIVATE;
// 发送请求
auto future = client->async_send_request(request);
if (rclcpp::spin_until_future_complete(client_node, future) == rclcpp::FutureReturnCode::SUCCESS) {
RCLCPP_INFO(client_node->get_logger(), "视觉节点激活成功");
} else {
RCLCPP_ERROR(client_node->get_logger(), "视觉节点激活失败");
}
rclcpp::shutdown();
return 0;
}3. 生命周期管理器(批量管控)
ROS2提供lifecycle_manager包,可批量管控多个节点的状态(如视觉节点+导航节点同步激活),适合机器人系统级管控:
bash
# 启动生命周期管理器,配置需管控的节点列表
ros2 run lifecycle_manager lifecycle_manager --ros-args -p node_names:="[vision_lifecycle_node,nav_lifecycle_node]"六、视觉场景高级特性
1. 错误处理
视觉节点易出现"相机断开、模型推理超时、GPU内存不足"等异常,建议:
- 在
on_error回调中记录详细日志(如相机ID、模型路径、异常原因); - 实现自动恢复逻辑(如重新连接相机、释放GPU缓存后重新加载模型);
- 避免直接进入Finalized,优先尝试回到Unconfigured状态重新配置。
2. 资源管控最佳实践
- 资源释放顺序:先停止采集/推理线程 → 暂停发布器 → 释放相机/模型 → 清空参数;
- 多线程隔离:视觉推理耗时(如YOLO检测),需将推理逻辑放在独立线程,避免阻塞状态转换;
- 参数校验前置 :在
on_configure阶段校验所有视觉参数(内参文件存在性、模型文件完整性),避免激活后出错。
3. 性能优化
- 生命周期发布器默认开启"延迟发布",激活前的发布请求会被丢弃,无需额外判断状态;
- 结合ROS2的
CallbackGroup,将状态转换回调和视觉推理回调放在不同组,避免互相阻塞。
总结
- 生命周期节点的核心是标准化状态拆分,解决视觉节点"资源管控粗放、容错低、交互无标准"的问题;
- 9个核心状态中,视觉场景高频使用Unconfigured/Inactive/Active/Error,需严格遵循合法转换规则;
- C++开发核心是继承
LifecycleNode,实现on_configure/on_activate等回调,结合LifecyclePublisher管控消息发布;