目录
1.摘要
针对地质灾害监测中无人机续航受限的问题,本文提出一种多航次路径规划模型。考虑不同灾害点的紧急程度,并设定收益随航次数增加而递减,在保证每个灾害点仅访问一次的前提下,最大化总收益并最小化航次数量,该问题为 NP-难问题,文中提出基于禁忌搜索的元启发式算法,并通过实际案例验证了模型与算法的有效性。
2.问题描述与数学模型
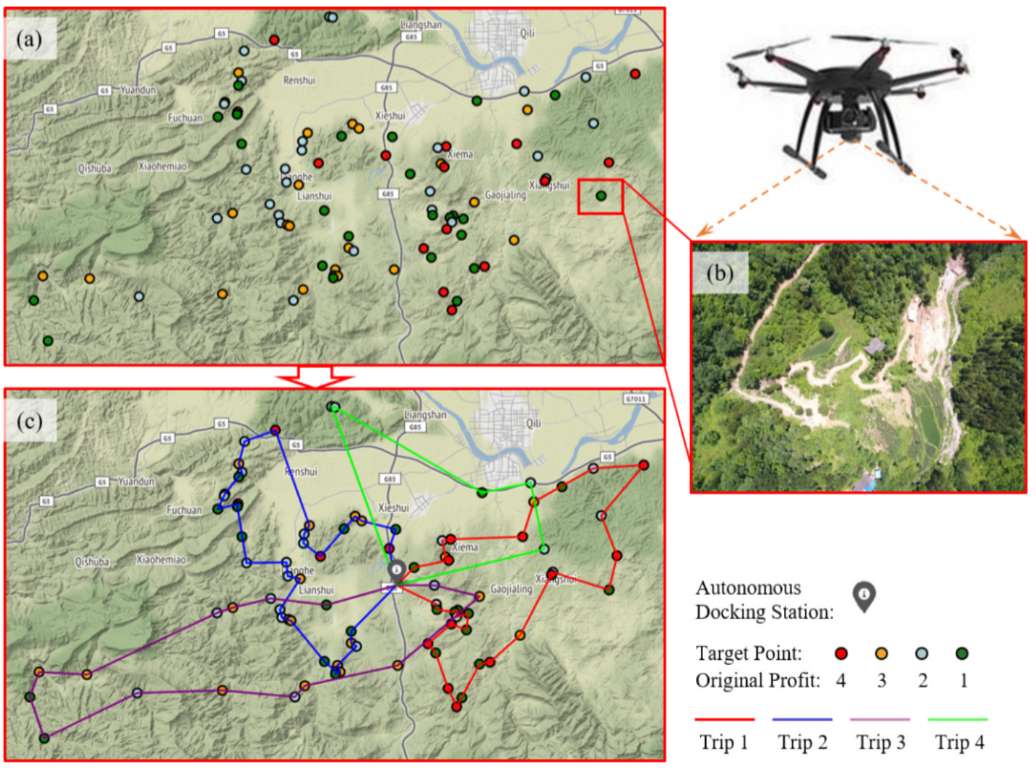
论文构建了一个具有递减收益的多航次无人机地质灾害监测路径规划模型,研究区域包含 n n n个地质灾害点(GS)和 1 个自主对接站(ADS),无人机从 ADS 出发并返回,受单次最大飞行时长限制,可能需多次往返完成全部监测任务。
模型以图 G = ( V , A ) G=(V,A) G=(V,A)表示监测网络,综合考虑飞行时间、服务时间及电池容量约束。每个灾害点根据其稳定性、危险等级等因素赋予非负收益 p i p_i pi ,且收益随航次数增加按比例递减,以体现越早监测越有价值的原则。目标是在确保每个灾害点恰好访问一次的前提下,优先监测高优先级目标,最小化航次数并最大化总收益。
模型以最大化递减收益为目标,在保证每个灾害点仅访问一次的前提下,优化各航次访问顺序与路径,使单次飞行时间不超过最大续航限制,并确保无人机每次均从对接站出发并返回。
3.算法设计
初始路径规划&邻域搜索
针对多航次无人机路径规划问题,本文采用基于局部搜索的元启发式算法求解。初始解通过2-Nearest随机插入方法生成,即在两个最近邻节点中随机选择插入,以平衡收敛速度与随机性;随后引入2-Nearest贪婪插入,优先选择收益更高的节点以提升解质量。
禁忌表
TS4GM算法在每次迭代中选择目标值最高的邻域解,并通过为各航次设置动态禁忌表避免重复搜索;若新解优于当前全局最优解,则可触发特赦准则不受禁忌限制。算法以2-Nearest贪婪插入生成初始解,结合航次内与航次间邻域操作持续改进路径,直至达到迭代上限或长时间无改进为止。
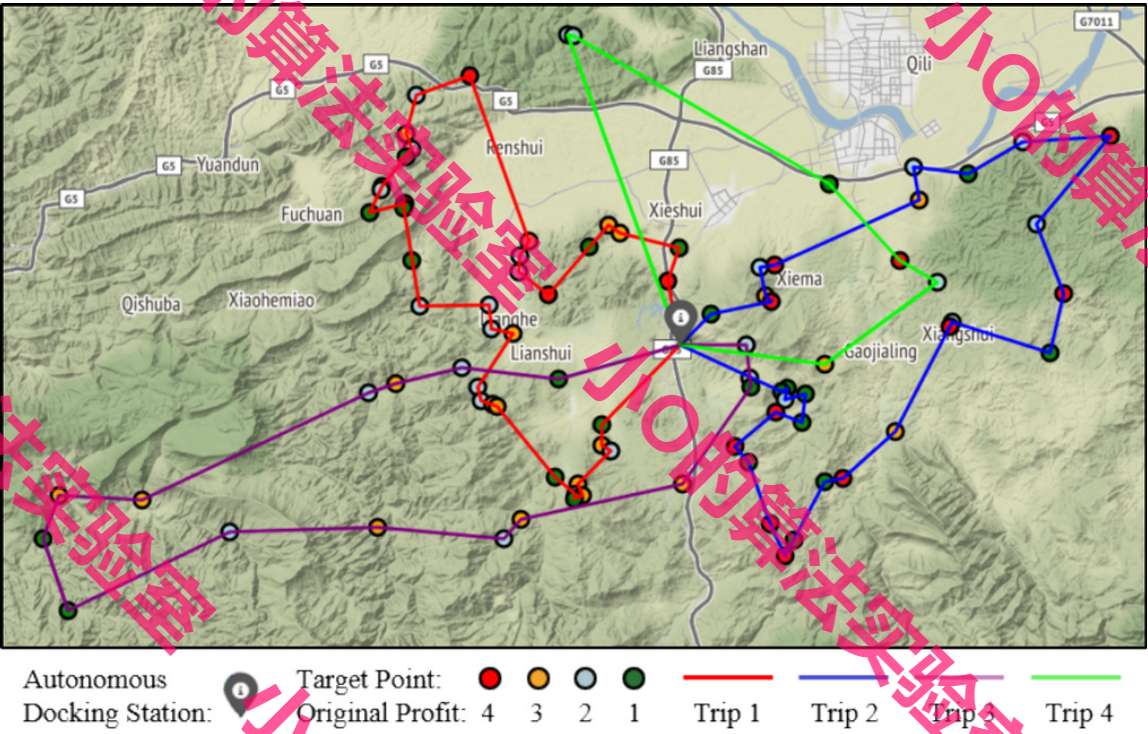
4.结果展示
5.参考文献
1 Wang W, Wen C. Multi-trip path planning for UAV with autonomous docking station in geohazards monitoringJ. Computers & Industrial Engineering, 2025: 111578.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx