核心痛点:从"看不见"到"管不住"

传统的电力巡检面临着三维空间的感知断层:
高空盲区与风险:跨越深山、江河的巡检,人工无法触及,且高空作业事故率居高不下。
定位精度缺失:发现缺陷后,无法精确描述其在地理空间中的经纬度及海拔高度,导致消缺人员"找不准、走错路"。
非结构化数据堆积:海量视频无法自动关联台账,隐患无法在地图上形成历史演化曲线。
深度方案:构建"视觉+时空"数字全域体系
思通数科通过"AI视频卫士"将计算机视觉与GIS地理信息系统深度融合,构建起一个多维协同的立体巡检网络。
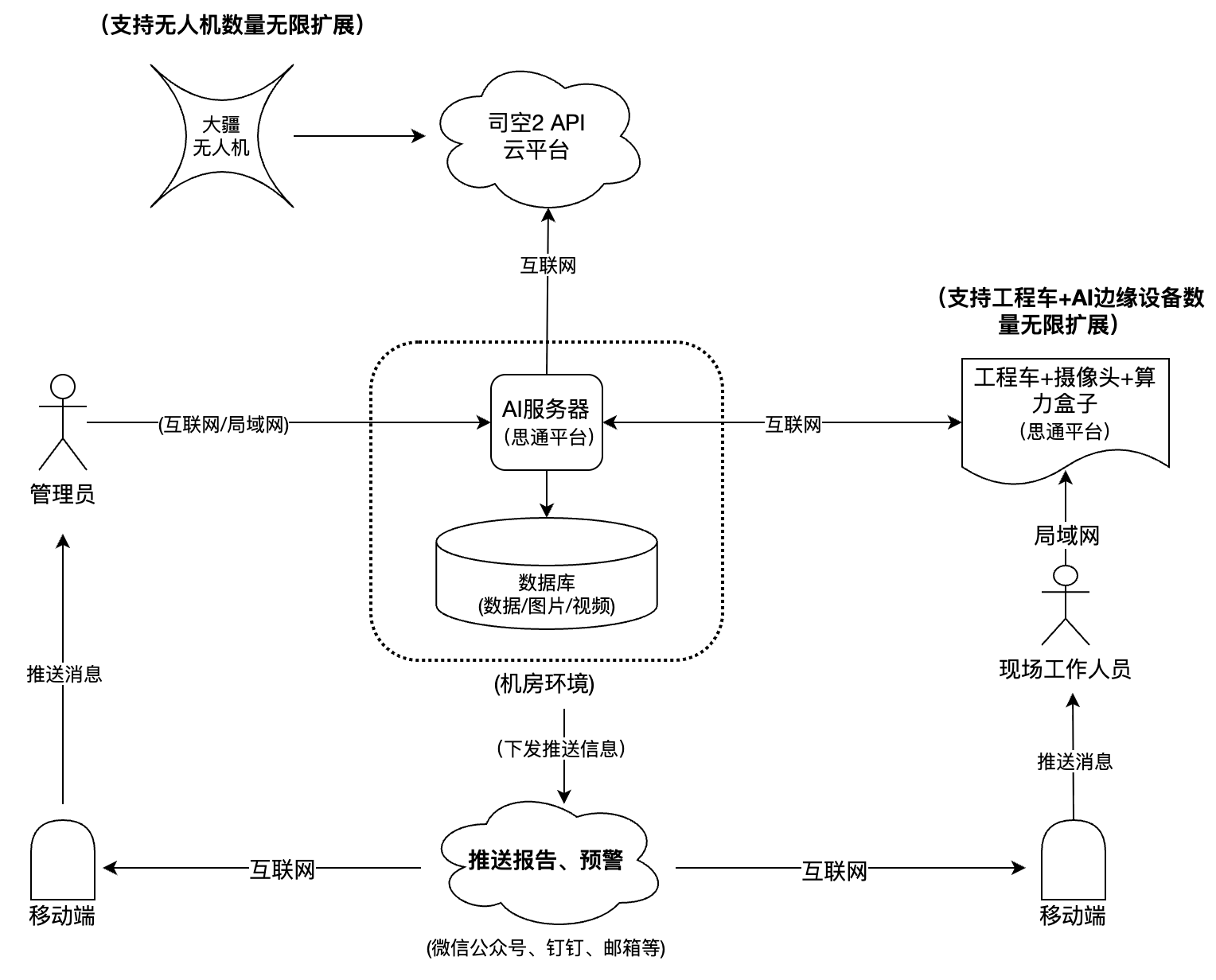
空中感知层:大疆无人机 + 司空2 + 思通AI算法
作业模式: 无人机搭载高清红外/可见光双光相机,按照预设的3D航路自动飞行。
深度算法: 思通数科自研的电力专用模型,可识别绝缘子自爆(缺失)、销钉脱落、防震锤位移、异物缠绕(风筝/遮阳网)以及线路下方的违章施工/超高植被。
GeoAI特征: 系统自动解析无人机Pos数据,将每一个缺陷瞬间映射为地图上的GIS坐标点。管理员在后台看到的不是一个孤立的视频,而是在电子地图上精准标注的"电力设备病历卡"。
地面移动层:工程车 + NVIDIA Orin + 5G边缘侧
作业模式: 巡检工程车搭载400万像素以上高清云台,在沿线道路行驶中进行常态化"扫街"。
边缘算力: 内置NVIDIA Jetson AGX Orin边缘计算模块。无需上传云端,在本地即可完成毫秒级的图像推理,识别塔基非法侵入、线缆破损、设备发热。
弱网保障: 借助华为5G工业路由器,即便在偏远山区,也能通过多链路切片技术,保障告警切片(带坐标的缩略图)优先回传。
决策闭环层:GIS地图一张图看板
自动落位: 所有的隐患告警自动在GIS底图上弹窗。
时空追溯: 系统能根据同一坐标点的历史数据,自动生成"隐患演化趋势"。例如:某处植被距离线路的净空距离在三个月内缩短了多少,从而触发主动式预警。

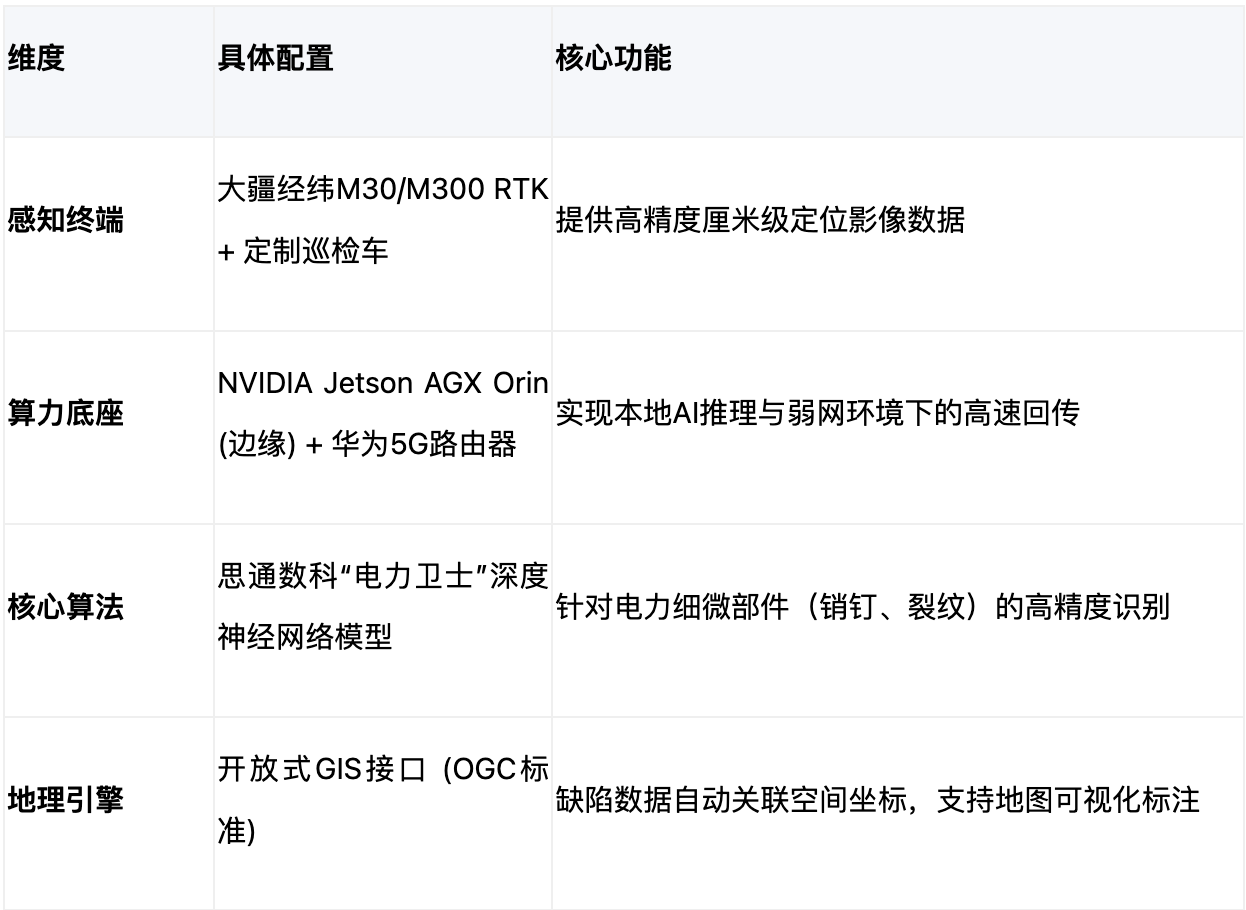
系统硬件与算法配置清单
核心结论:从"人力密集"转向"算法驱动"
通过思通数科这套"空地一体"方案,电力巡检将实现三个维度的彻底变革:
效率革命: 综合巡检效率提升 6-10倍。无人机与巡检车的协同,使单日巡检里程从传统的几公里跃升至数十公里。
安全重构: 实现了"人不下地、人不攀塔"。将高风险的作业环境完全交给自动驾驶与AI算法,从根本上杜绝了人员伤亡风险。
资产数字化: 结论不再是模糊的"某段线路有问题",而是"35kV某线12号塔左侧绝缘子缺失,坐标(E11X.XX, N3X.XX)"。这种基于GIS的精准定位,缩短了50%以上的维修响应时间。
