Part III 1-3
- [Part III:BrepGaussian、拓扑组合、工业评估与失败模式](#Part III:BrepGaussian、拓扑组合、工业评估与失败模式)
-
- [1. B-rep 是什么](#1. B-rep 是什么)
-
- [1.1 B-rep 的基本对象](#1.1 B-rep 的基本对象)
- [1.2 几何层与拓扑层](#1.2 几何层与拓扑层)
- [1.3 Cell Complex / CW complex / Hasse graph](#1.3 Cell Complex / CW complex / Hasse graph)
- [1.4 B-rep 合法性的数学要求](#1.4 B-rep 合法性的数学要求)
- 小结
- [2. BrepGaussian:深度拆解](#2. BrepGaussian:深度拆解)
-
- [2.1 任务定义](#2.1 任务定义)
- [2.2 整体架构](#2.2 整体架构)
- [2.3 two-stage learning 的必要性](#2.3 two-stage learning 的必要性)
- [2.4 几何处理链路](#2.4 几何处理链路)
- [2.5 拓扑难点:geometry + combinatorics 的双重问题](#2.5 拓扑难点:geometry + combinatorics 的双重问题)
- [2.6 与 Point2CAD 的本质差异](#2.6 与 Point2CAD 的本质差异)
- [2.7 离工业可用还有多远](#2.7 离工业可用还有多远)
- 小结
- [3. 数学与算法深挖专题:拓扑、曲面相交、误差传播](#3. 数学与算法深挖专题:拓扑、曲面相交、误差传播)
-
- [3.1 参数曲面与工程曲面](#3.1 参数曲面与工程曲面)
- [3.2 曲面相交与边生成](#3.2 曲面相交与边生成)
- [3.3 trimming 与 parameter domain consistency](#3.3 trimming 与 parameter domain consistency)
- [3.4 误差传播链条](#3.4 误差传播链条)
- [3.5 链式误差的工程后果](#3.5 链式误差的工程后果)
- 小结
Part III:BrepGaussian、拓扑组合、工业评估与失败模式
1. B-rep 是什么
1.1 B-rep 的基本对象
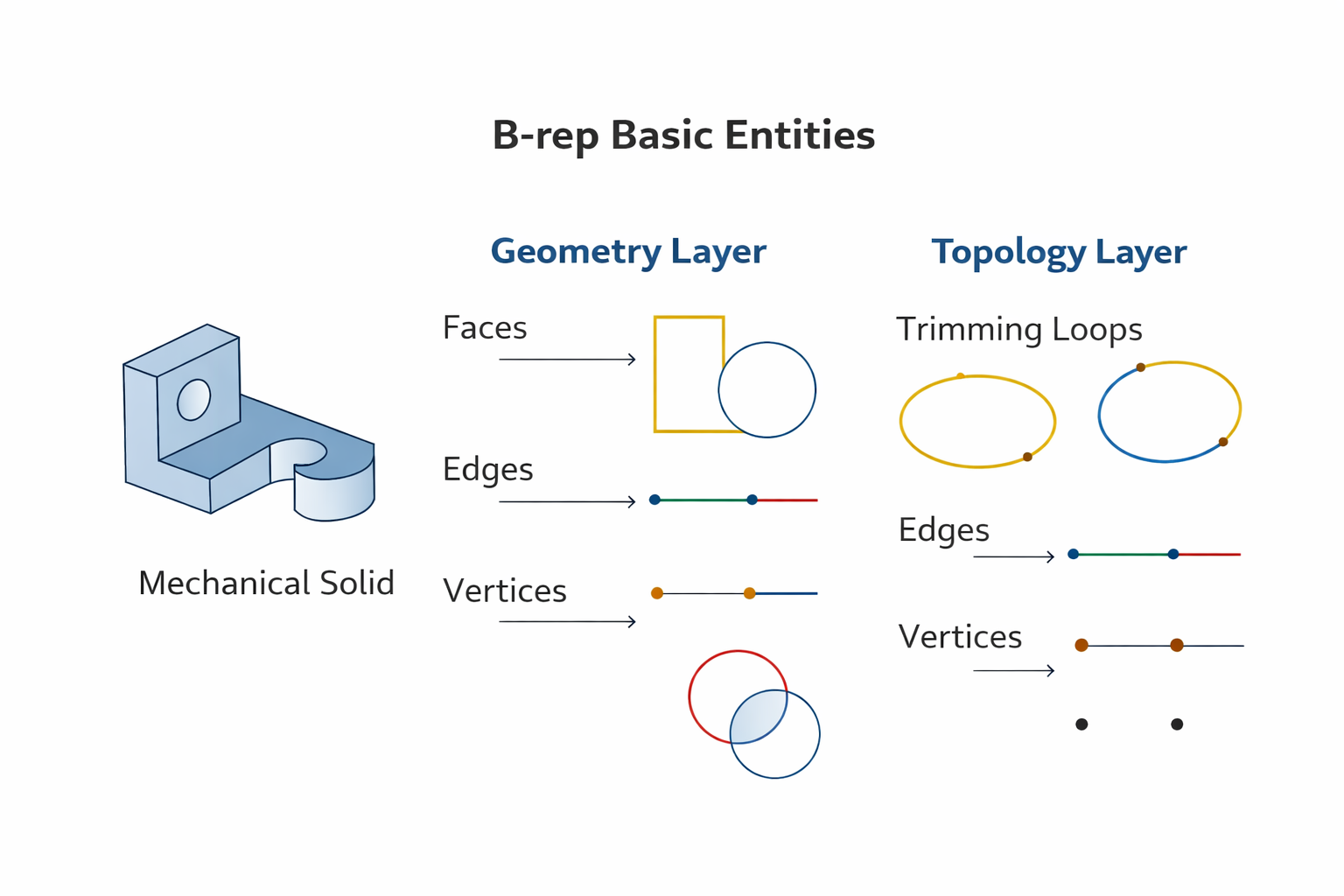
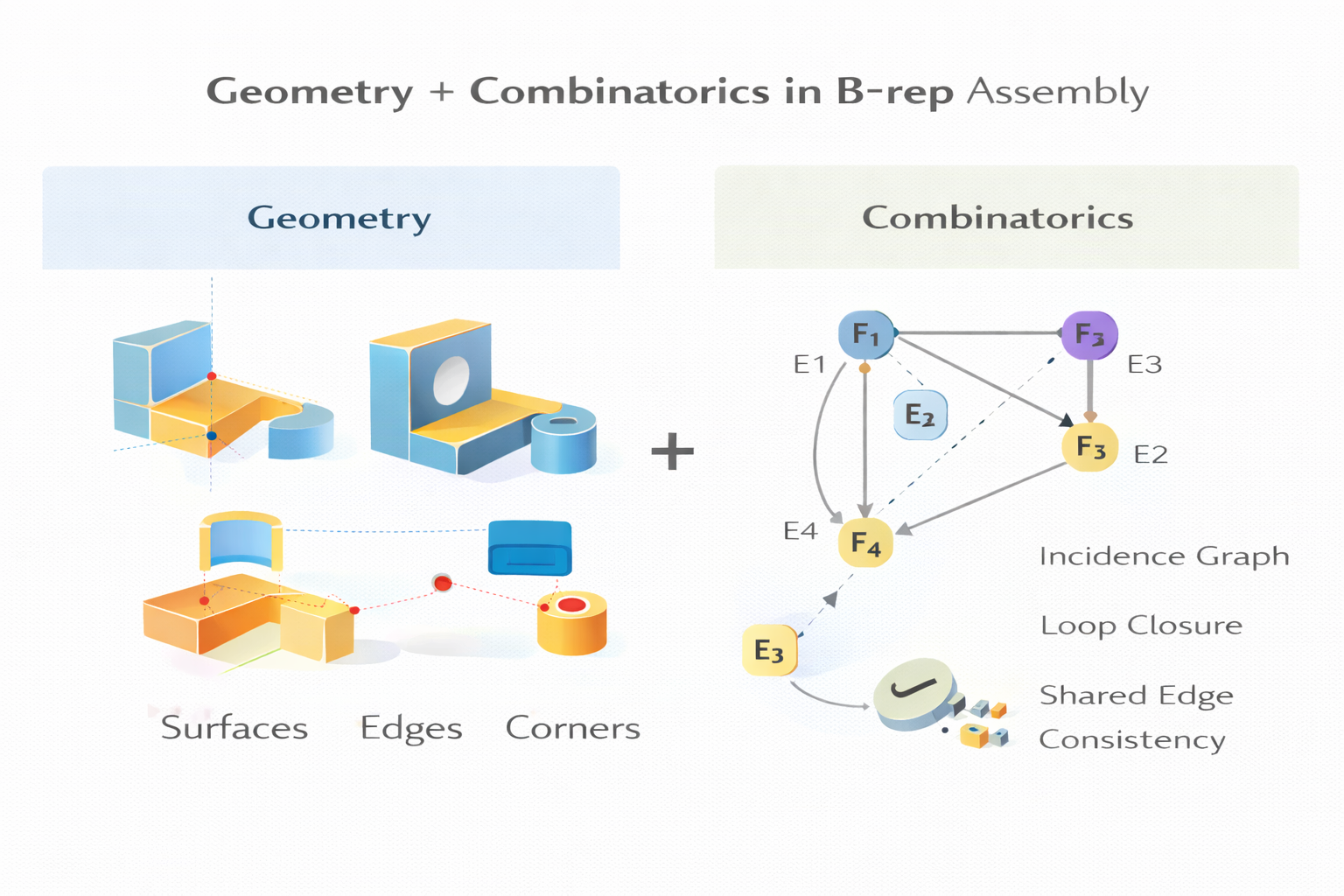
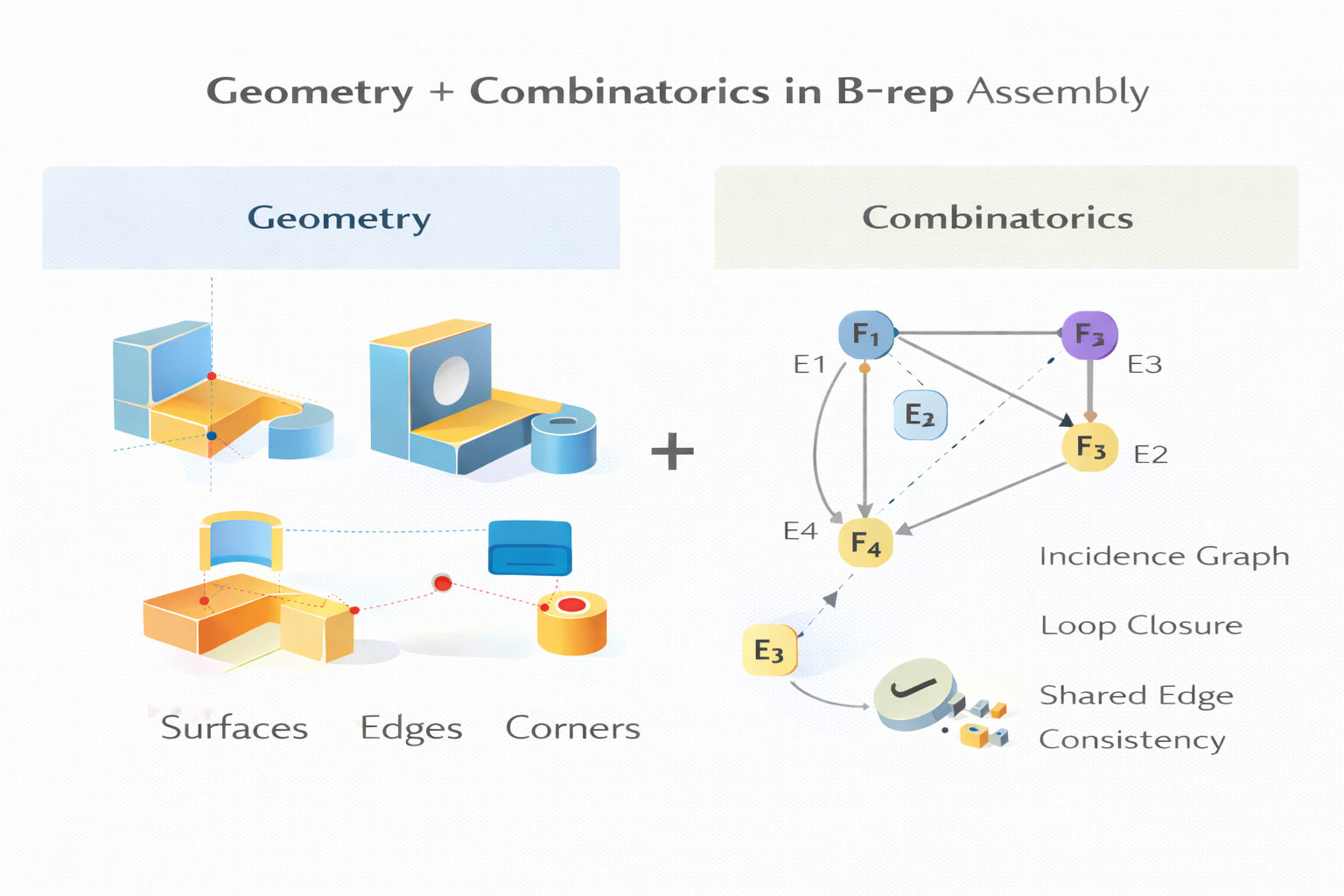
回顾一下:B-rep 的对象不是"多边形片元",而是带解析几何语义的结构化边界对象 ,是几何边界 + 组合拓扑共同定义的实体。在工程 CAD 内核中,B-rep 由两层同时构成:
- 几何层(geometry):曲线、曲面、参数域
- 拓扑层(topology):点、边、面及其邻接、关联、方向、闭合关系
形式上,可将一个 B-rep 实体写为:
B = ( V , E , F , I , A , T ) . (1) \mathcal{B}=(V,E,F,\mathcal{I},\mathcal{A},\mathcal{T}). \tag{1} B=(V,E,F,I,A,T).(1)
其中:
- V V V:顶点集合(vertices / corners)
- E E E:边集合(edges)
- F F F:面集合(faces)
- I \mathcal{I} I:incidence relations,关联关系
- A \mathcal{A} A:adjacency relations,邻接关系
- T \mathcal{T} T:trimming 信息
工程几何角度上,B-rep 至少包含以下基本对象:
- face:被裁剪后的参数曲面区域
- edge:定义在曲面边界上的参数曲线或交线片段
- vertex / corner:边的端点、多个边或多个面的交汇点
- trimming loop:在参数域内闭合的裁剪边界
- adjacency / incidence graph:描述 face-edge-vertex 之间的连接结构
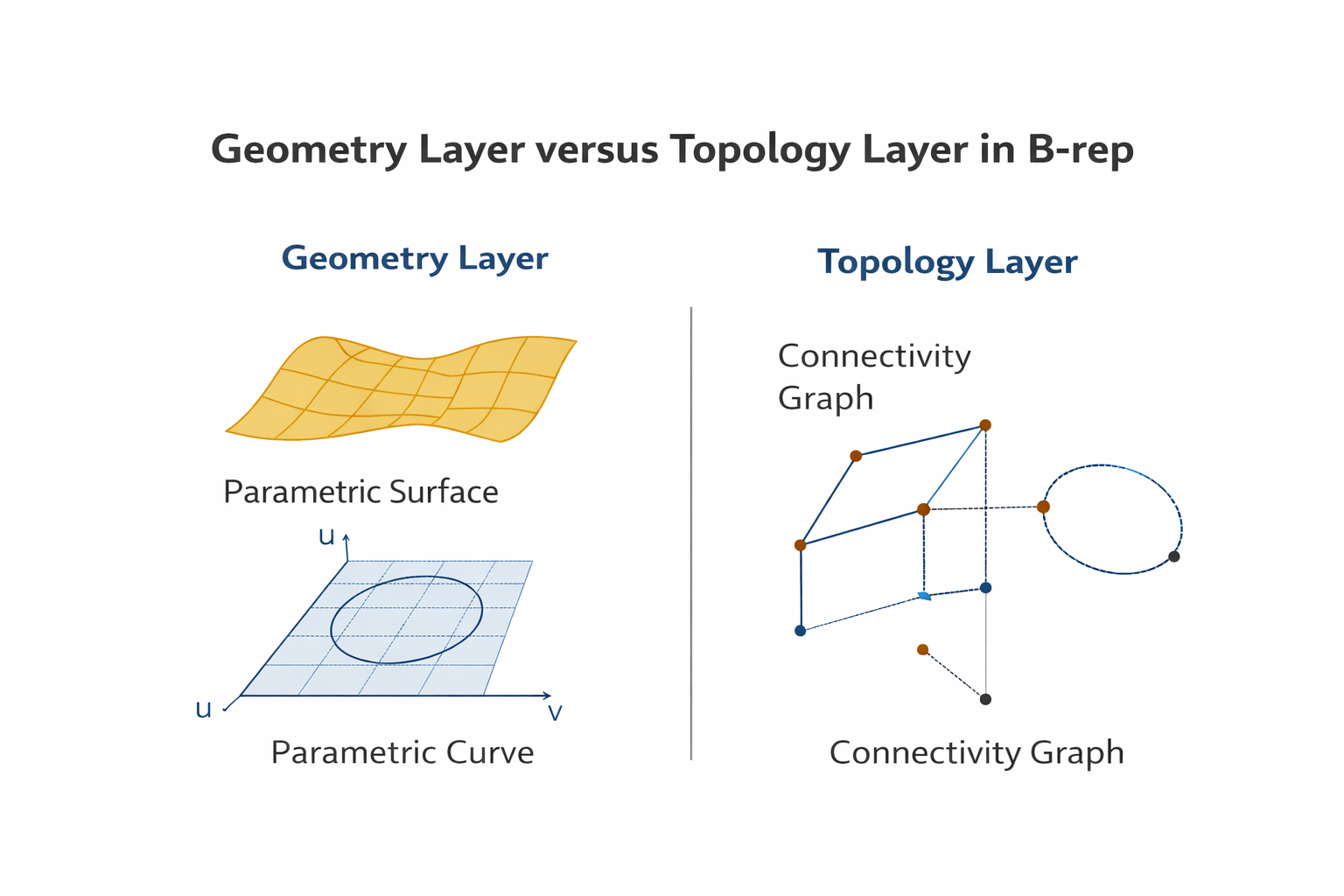
1.2 几何层与拓扑层
一个 B-rep face 不是"整张无限延展的曲面",而是参数曲面在参数域中被 trimming loop 裁剪后的有效区域。
对每个面 F i F_i Fi,更精确的表达应为:
F i = ( S i , { γ i , k } k = 1 m i ) , (2) F_i=\left(S_i,\{\gamma_{i,k}\}_{k=1}^{m_i}\right), \tag{2} Fi=(Si,{γi,k}k=1mi),(2)
其中:
- S i ( u , v ) S_i(u,v) Si(u,v):底层参数曲面
- γ i , k \gamma_{i,k} γi,k:定义在参数域上的第 k k k 条 trimming loop
因此,几何层与拓扑层的职责必须严格区分。
几何层负责
- 曲面 S ( u , v ) S(u,v) S(u,v) 的解析定义
- 曲线 c ( t ) c(t) c(t) 的解析定义
- 参数域 Ω \Omega Ω
- 曲面局部法向、曲率、参数连续性
拓扑层负责
- 哪些 edge 属于哪个 face 的边界
- 哪些 faces 共享一条 edge
- 哪些 edges 在某个 vertex 相交
- 边界环是否闭合
- orientation 是否一致
- 整体是否形成 manifold / watertight shell
几何正确不等于拓扑正确。即便某些曲面和曲线在 3D 空间中位置合理,若其关联关系、闭环关系、方向一致性不成立,仍然不能构成合法 B-rep。
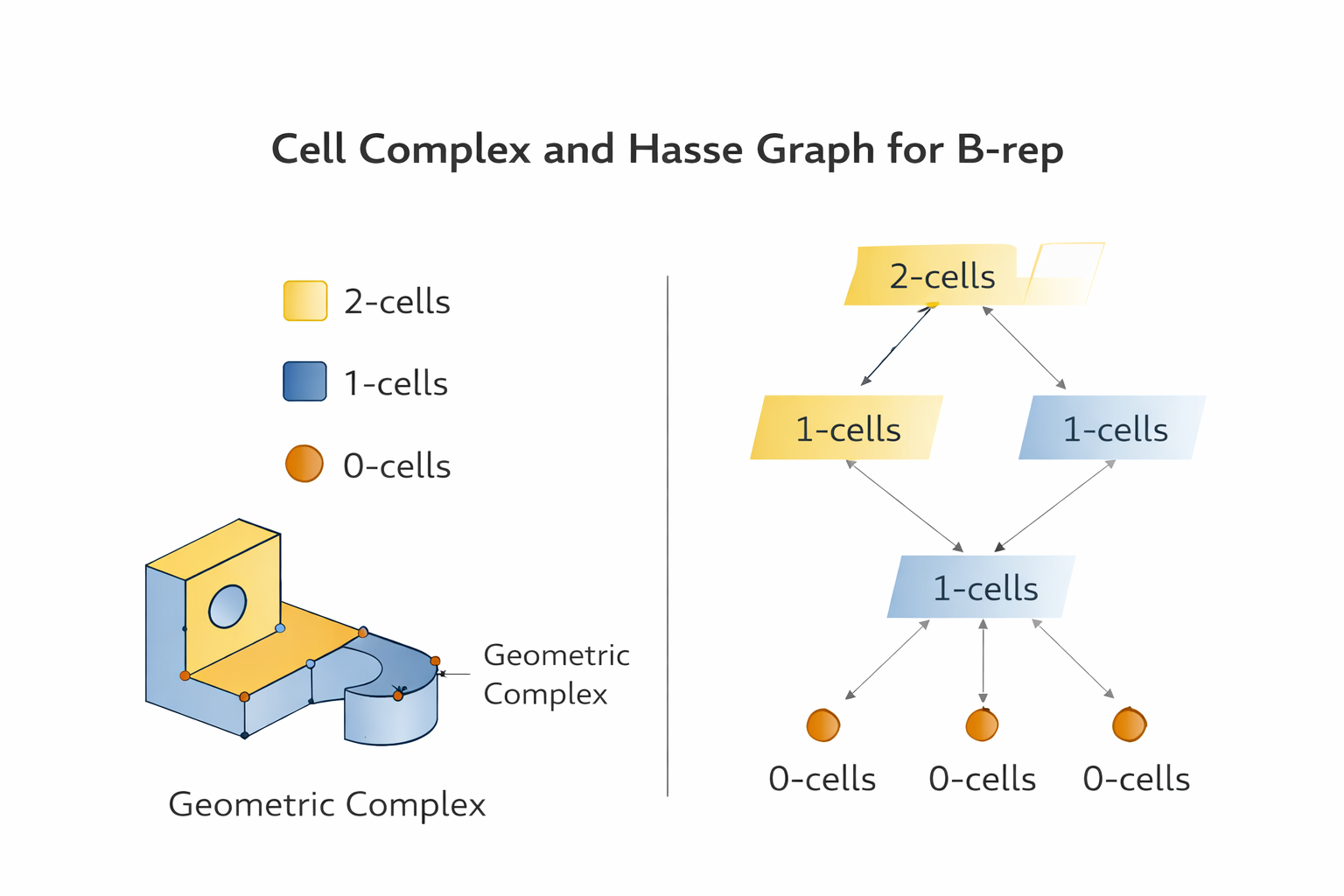
1.3 Cell Complex / CW complex / Hasse graph
从更统一的数学视角,B-rep 可以理解为嵌入到 R 3 \mathbb{R}^3 R3 中的一个几何 cell complex。其最核心的边界层包括:
- 0-cell:vertex
- 1-cell:edge
- 2-cell:face
记 cell 集合为:
C = C 0 ∪ C 1 ∪ C 2 , (3) \mathcal{C}=\mathcal{C}_0 \cup \mathcal{C}_1 \cup \mathcal{C}_2, \tag{3} C=C0∪C1∪C2,(3)
其中:
- C 0 \mathcal{C}_0 C0:0-cells
- C 1 \mathcal{C}_1 C1:1-cells
- C 2 \mathcal{C}_2 C2:2-cells
若用偏序关系 ≺ \prec ≺ 表示"某个低维 cell 是高维 cell 的边界组成部分",则可以定义 Hasse graph:
H = ( C , ≺ ) . (4) \mathcal{H}=(\mathcal{C},\prec). \tag{4} H=(C,≺).(4)
Hasse graph 的作用,是显式编码不同阶 cell 之间的 incidence 关系,例如:
- vertex 是否属于某条 edge
- edge 是否属于某个 face 的边界
- 某个 face 是否通过若干 edges 形成闭环
这种视角对 B-rep 学习与生成至关重要,原因在于:
- B-rep 本质上不是纯几何拟合问题,而是 geometry + combinatorics 联合问题。
- 若没有 cell-level 结构,便无法表达 face-edge-vertex 的边界链条。
- 若没有 Hasse graph 或 incidence graph,便无法对 topology correctness 建模。
1.4 B-rep 合法性的数学要求
一个"看起来像"的 patch / curve 集合,距离一个"合法可消费"的 B-rep,还差一整套 legality constraints。
首先,常见的全局拓扑检查包括 Euler 风格指标:
χ = ∣ V ∣ − ∣ E ∣ + ∣ F ∣ . (5) \chi = |V|-|E|+|F|. \tag{5} χ=∣V∣−∣E∣+∣F∣.(5)
当然,Euler characteristic 只是辅助信号,不是充分条件。一个合法 B-rep 至少还必须满足:
(1)watertight / manifold / orientation consistency
内部共享边应恰有两个 incident faces,边界边应恰有一个 incident face,且方向一致:
∀ e ∈ E int , # I n c F a c e s ( e ) = 2. (6) \forall e\in E_{\text{int}},\quad \#\mathrm{IncFaces}(e)=2. \tag{6} ∀e∈Eint,#IncFaces(e)=2.(6)
(2)trimming curves must lie on surfaces
裁剪边界曲线既要在 3D 空间中成立,也要在对应曲面的参数域内成立。设某条 trim curve 为 γ i , k ( t ) \gamma_{i,k}(t) γi,k(t),则需满足:
γ i , k ( 0 ) = γ i , k ( 1 ) , (7) \gamma_{i,k}(0)=\gamma_{i,k}(1), \tag{7} γi,k(0)=γi,k(1),(7)
并且其映射到三维空间后必须落在曲面边界上:
S i ( γ i , k ( t ) ) ∈ ∂ F i . (8) S_i(\gamma_{i,k}(t)) \in \partial F_i. \tag{8} Si(γi,k(t))∈∂Fi.(8)
(3)loops must close
每个 wire / trimming loop 必须闭合,不能出现 gap、悬挂边、断裂边界。
(4)shared edge consistency
若两个 faces 共享一条边,则该边在两个 face 上的参数表示、方向、3D 位置都应一致。
(5)vertex-edge-face incidence consistency
每个顶点、边、面的关联关系必须互相兼容,不能出现 edge 端点不属于该 edge、face 边界不经过其声明的 vertex 等情况。
(6)parameter domain consistency
一条边界曲线不仅要在 3D 中对,还必须在曲面参数域中有一致前像;这也是 trimmed surfaces 难于普通曲面片拼接的根源之一。
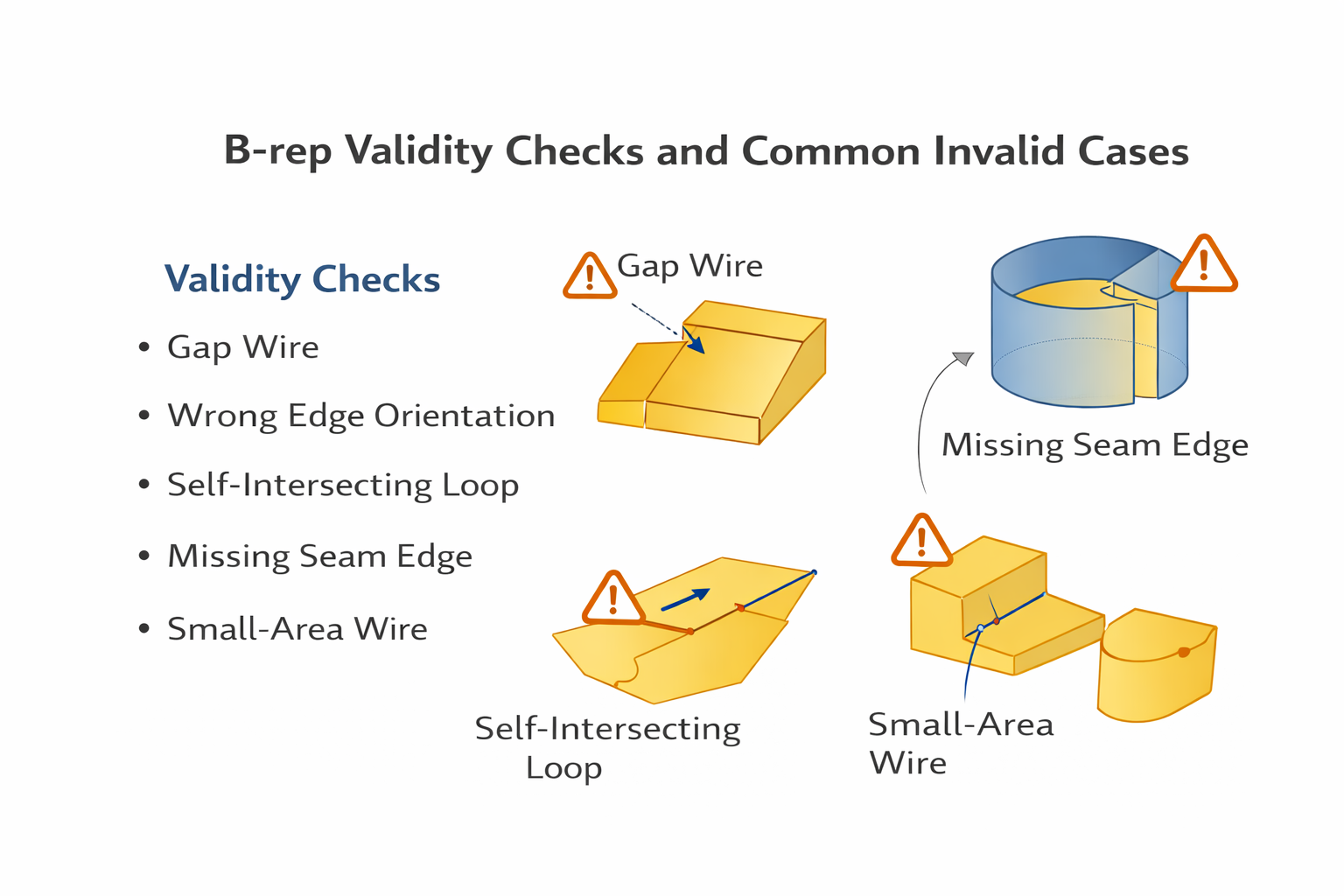
OpenCascade 的 Shape Healing / ShapeFix 文档明确给出了多种不合法面片与修复场景,例如:
- wire 在 3D 中闭合,但在参数域中存在 gap
- edge orientation 错误
- loop wire 自交
- 缺失 seam edge
- null-area wire / small-area wire 导致无效边界
小结
B-rep 不是"几何拟合结果的包装格式",而是"参数几何 + 裁剪边界 + 组合拓扑 + 合法性约束"的联合对象。
- 只有曲面拟合,没有 trim / topology / legality,不是 B-rep
- 只有边界检测,没有参数域一致性,不是 B-rep
- 只有局部结构正确,没有整体 incidence consistency,也不是 B-rep
这也是后文分析 BrepGaussian 时的前提:它真正挑战的,不是"从图像里多拟合几个 primitive",而是如何把几何元装配成合法 B-rep。
2. BrepGaussian:深度拆解
2.1 任务定义
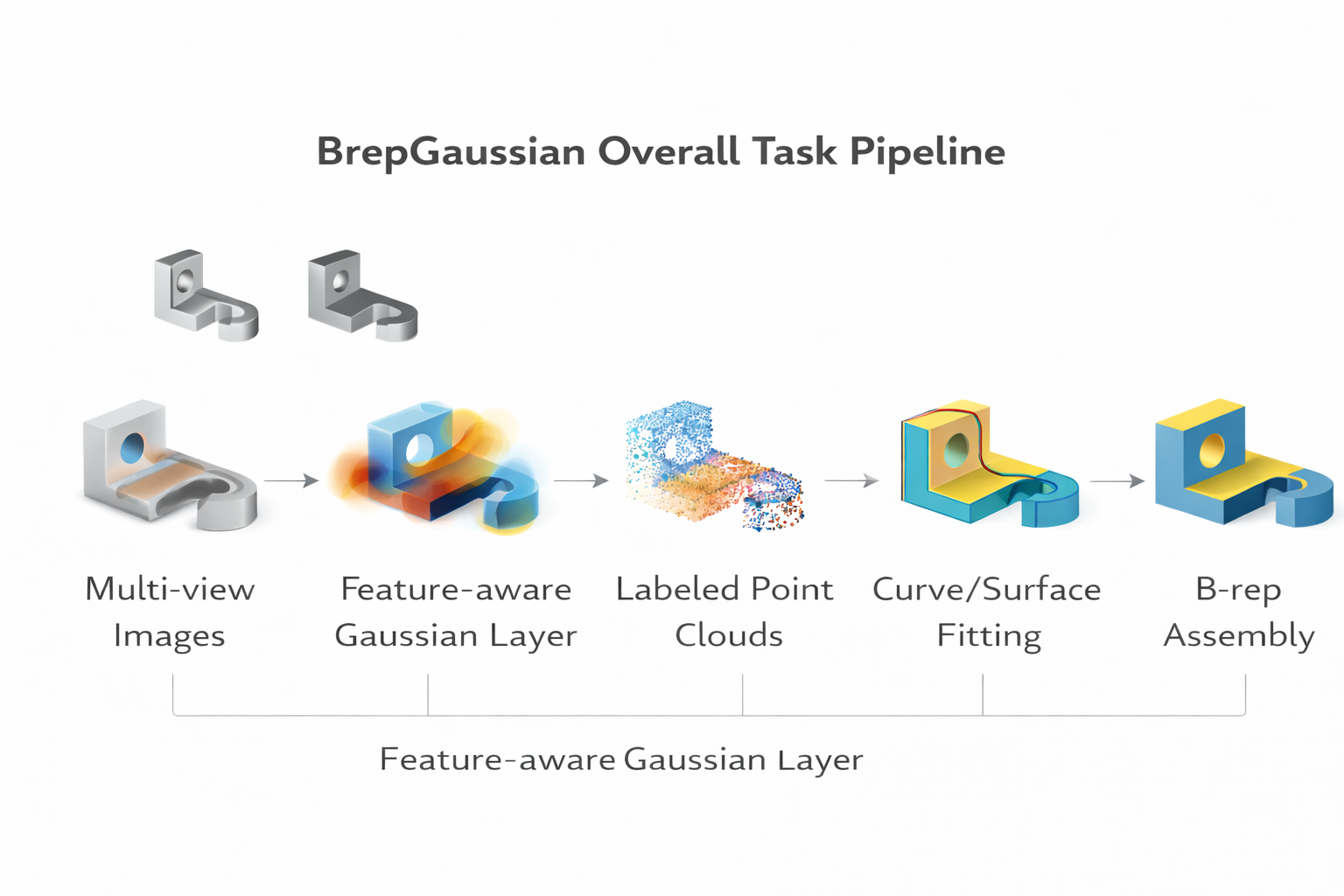
BrepGaussian 的核心任务,是从多视图图像直接恢复参数化 B-rep 。其论文明确声称,它是在不依赖 point cloud supervision的条件下,从 multi-view images 直接重建 complete B-rep CAD models 的首个框架之一。其主链路可以概括为:
multi-view images → feature-aware Gaussian intermediate layer → labeled point clouds → curve / surface fitting → B-rep assembly . (9) \text{multi-view images} \rightarrow \text{feature-aware Gaussian intermediate layer} \rightarrow \text{labeled point clouds} \rightarrow \text{curve / surface fitting} \rightarrow \text{B-rep assembly}. \tag{9} multi-view images→feature-aware Gaussian intermediate layer→labeled point clouds→curve / surface fitting→B-rep assembly.(9)
为什么这比 point cloud → \rightarrow → CAD 更难?因为它不只是把"点云逆向"换成"图像逆向",而是把原本点云已经提供的 3D 几何采样,也前移到了图像域中。也就是说,BrepGaussian 必须同时解决:
- 从多视图图像中恢复可稳定对齐的中间几何表示;
- 从该中间表示中恢复 patch / edge / corner 的结构线索;
- 将这些几何元进一步装配为合法 B-rep。
因此,它真正对应的是"图像到 CAD 的最后一公里"问题。
2.2 整体架构
根据论文公开描述,BrepGaussian 的整体结构大体可拆为四段。
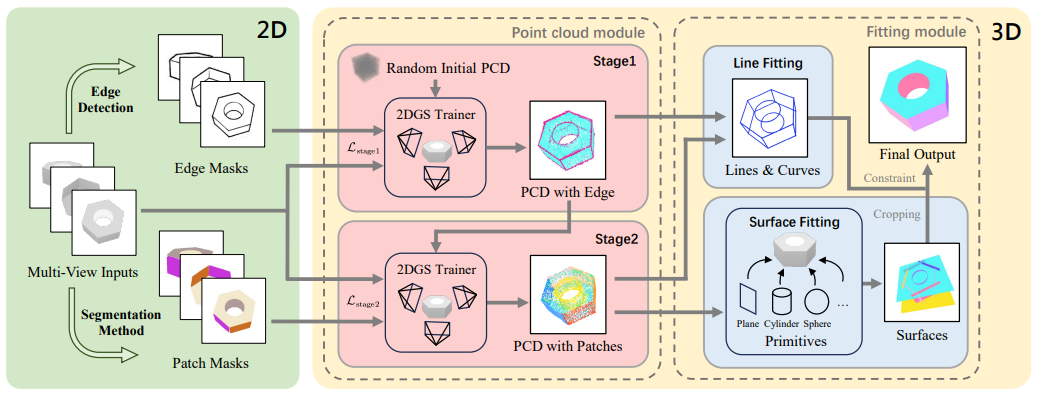
第一段:多视图语义预处理
使用图像处理模型从输入多视图图像中提取:
- 2D edge masks
- 2D patch masks
这些结果为后续 feature-aware Gaussian 学习提供监督或初始化信息。
第二段:feature splats 学习
在 Gaussian Splatting 框架中,为 surface-aligned Gaussian primitives 赋予可学习特征,使其不仅承载 radiance / visibility 信息,还承载:
- geometry-level information
- edge-level information
- patch-level information
第三段:从 Gaussian 到带标签点云
从 learned Gaussian disks 中采样点,并将其转化为带 patch / edge 标签的点云表示,用于后续参数几何拟合。
第四段:参数曲面与 B-rep 装配
在带标签点云基础上执行:
- primitive fitting
- patch coherence establishment
- edge extraction
- corner inference
- trimming / clipping
- topology assembly
- topological adjustment
最后输出 clean and watertight B-rep。
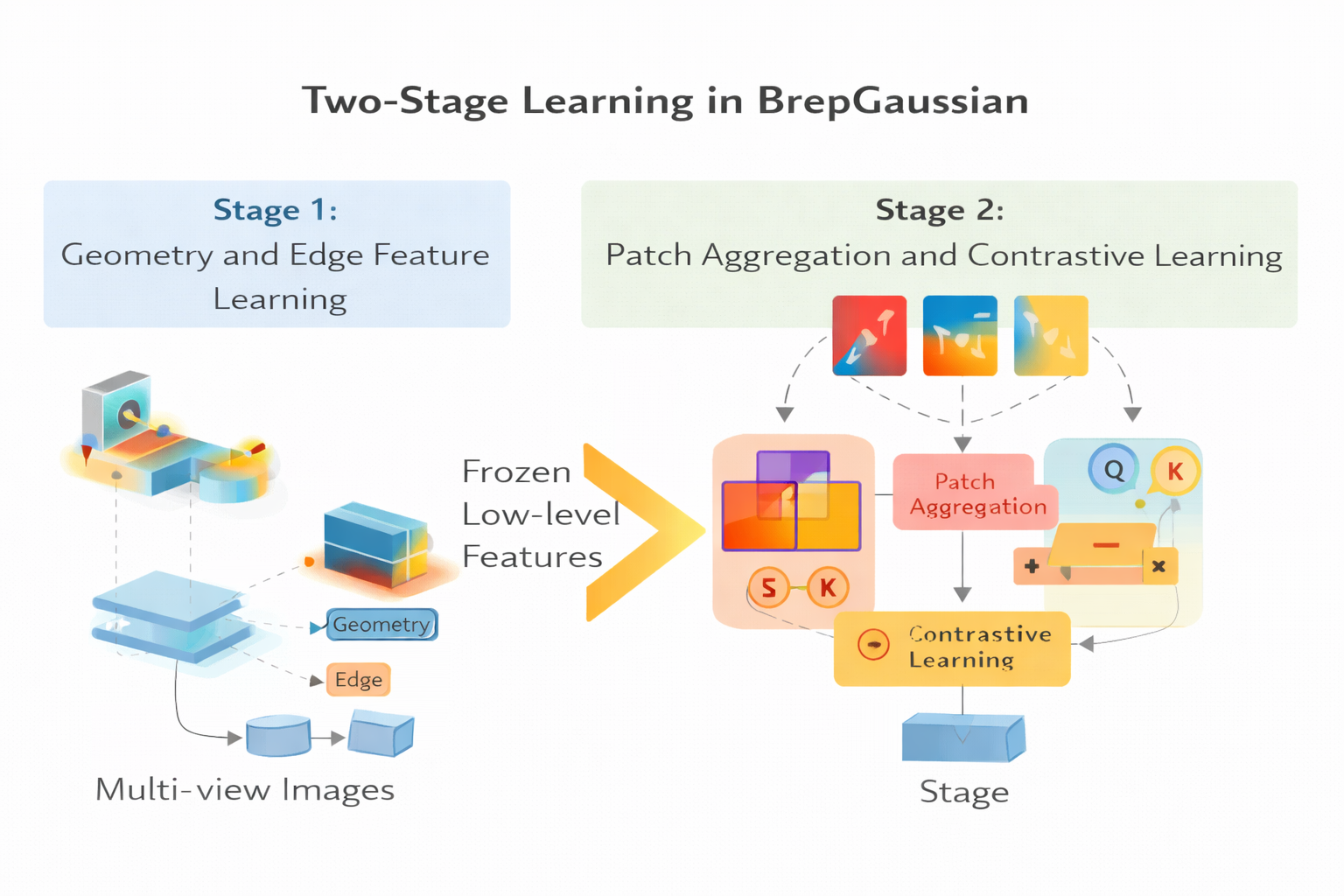
2.3 two-stage learning 的必要性
BrepGaussian 之所以采用 two-stage learning,不是为了"训练技巧更复杂",而是因为geometry / edge 与 patch coherence 的学习压力本来就不同。
根据论文描述:
第一阶段
重点学习:
- geometry
- edge features
原因在于,几何与边缘是更基础、更局部的结构信号。若一开始就同时强求 patch-level coherent instance labels,容易在 early stage 被 noisy segmentation、纹理差异、遮挡影响干扰。
第二阶段
冻结第一阶段得到的 geometry / edge features,进一步进行:
- patch-level feature aggregation
- contrastive learning
- coherent patch instance labeling
这一阶段的目标,不是再去重建最基础的局部 geometry,而是让更高层的 patch 语义在 feature space 中更稳定地聚合。
因此,两阶段设计背后的本质逻辑可以写成:
Θ ( 1 ) = arg min L geom + λ e L edge , (10) \Theta^{(1)} = \arg\min \mathcal{L}{\text{geom}} + \lambda_e \mathcal{L}{\text{edge}}, \tag{10} Θ(1)=argminLgeom+λeLedge,(10)
Θ ( 2 ) = arg min L patch + λ c L contrast , s.t. Θ geom/edge frozen . (11) \Theta^{(2)} = \arg\min \mathcal{L}{\text{patch}} + \lambda_c \mathcal{L}{\text{contrast}}, \quad \text{s.t. } \Theta_{\text{geom/edge}} \text{ frozen}. \tag{11} Θ(2)=argminLpatch+λcLcontrast,s.t. Θgeom/edge frozen.(11)
这里:
- Θ ( 1 ) \Theta^{(1)} Θ(1):第一阶段参数
- Θ ( 2 ) \Theta^{(2)} Θ(2):第二阶段 patch-level 学习参数
- L geom \mathcal{L}_{\text{geom}} Lgeom:几何一致性损失
- L edge \mathcal{L}_{\text{edge}} Ledge:边缘监督损失
- L patch \mathcal{L}_{\text{patch}} Lpatch:patch coherence / instance 分类相关损失
- L contrast \mathcal{L}_{\text{contrast}} Lcontrast:对比学习约束
这个 two-stage 设计的意义在于:B-rep 恢复不能把所有语义层级混成一个一次性黑箱目标。
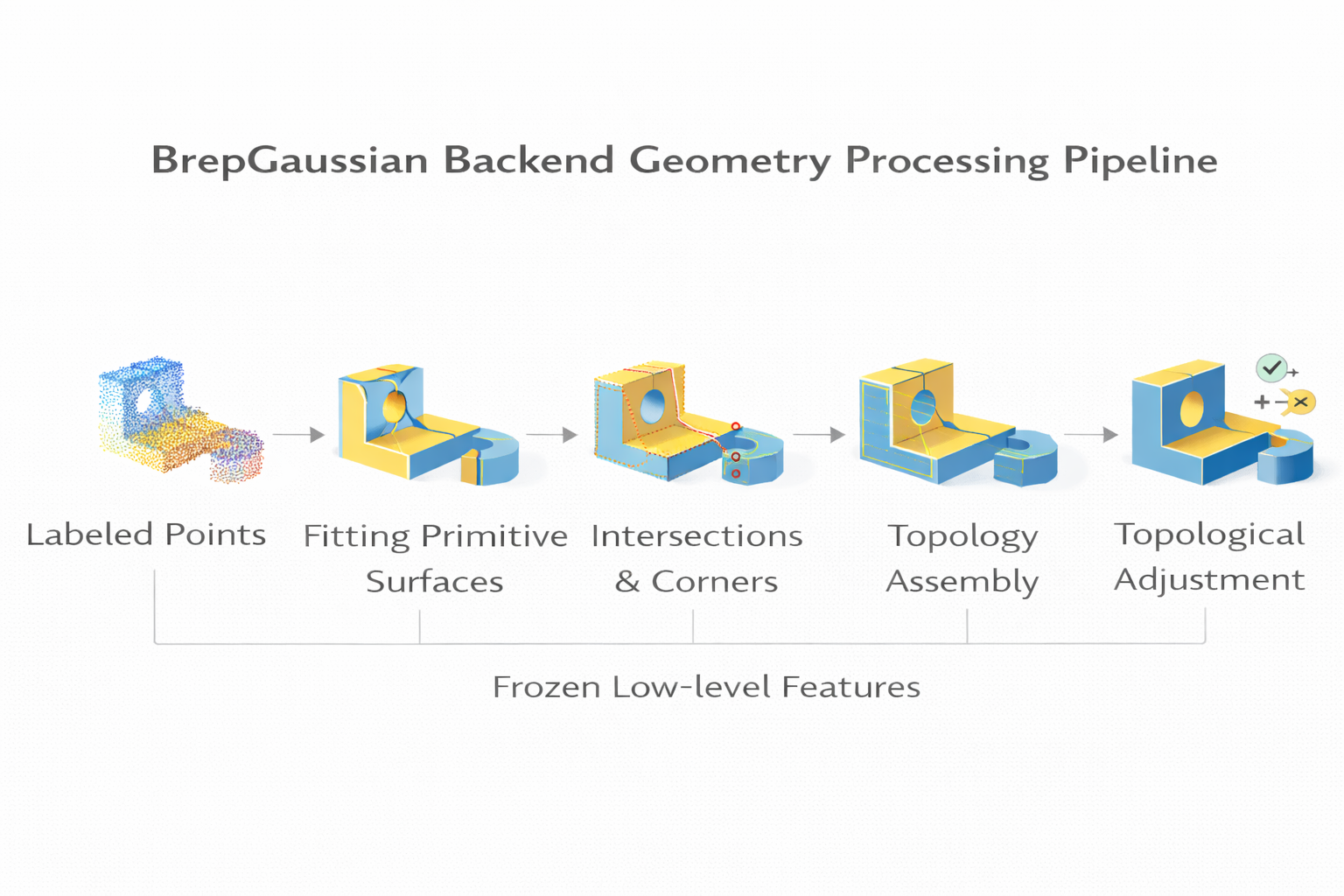
2.4 几何处理链路
BrepGaussian 后半段的几何处理链路,其实非常接近经典 reverse engineering,只是其输入不再是 raw point cloud,而是由 Gaussian 中间层导出的结构化点集。
可抽象为:
{ P ^ k } k = 1 K → { S ^ i } i = 1 m → { e ^ i j } → { v ^ ℓ } → B ^ . (12) \{\hat P_k\}{k=1}^{K} \rightarrow \{\hat S_i\}{i=1}^{m} \rightarrow \{\hat e_{ij}\} \rightarrow \{\hat v_\ell\} \rightarrow \hat{\mathcal B}. \tag{12} {P^k}k=1K→{S^i}i=1m→{e^ij}→{v^ℓ}→B^.(12)
其中:
- P ^ k \hat P_k P^k:带 patch / edge 标签的点子集
- S ^ i \hat S_i S^i:拟合出的参数曲面 primitive
- e ^ i j \hat e_{ij} e^ij:由曲面相交得到的边
- v ^ ℓ \hat v_\ell v^ℓ:由边交或面交推断得到的角点
- B ^ \hat{\mathcal B} B^:最终装配的 B-rep
具体步骤包括
(1)patch grouping
根据 patch labels 将点云划分为多个 surface candidates。
(2)primitive fitting
对每个 patch 拟合解析曲面。根据论文当前公开设定,主要是:
- plane
- cylinder
- sphere
(3)patch coherence establishment
在 patch 层面建立一致性,避免过碎的 patch 或语义混乱的 surface instances。
(4)edge extraction
对 primitive pairs 求交,得到 line / curve candidates;再结合 edge point cloud 约束其有效参数范围。
(5)corner inference
从多平面交、两直线交或曲线端点聚类中推断 corner candidates。
(6)topology assembly
根据 face-edge-vertex 关系组装初始拓扑结构。
(7)trimming / clipping / adjacency reconstruction
对无限延展的 primitive surfaces 进行裁剪,并恢复共享边、邻接面和有效边界环。
(8)topological adjustment
通过约束修正、布尔操作、局部修补等方式,使结果尽可能 clean and watertight。
2.5 拓扑难点:geometry + combinatorics 的双重问题
BrepGaussian 真正困难的地方,不在"曲面拟合",而在如何让几何对象之间的组合关系也同时成立。
必须明确以下不等价关系:
- patch 拟合正确 ≠ \neq = topology 正确
- edge 检出正确 ≠ \neq = trimming 合法
- corner 看起来合理 ≠ \neq = incidence graph 一致
- 各个 primitive 局部都对 ≠ \neq = 最终 B-rep 合法
换句话说,B-rep 装配不是单纯的几何拟合问题,而是一个 geometry + combinatorics 的联合优化问题。
这一点可以形式化为:
B ^ = arg min B L geom + λ s L struct + λ t L topo + λ v L valid . (13) \hat{\mathcal B}= \arg\min_{\mathcal B} \mathcal{L}{\text{geom}} + \lambda_s \mathcal{L}{\text{struct}} + \lambda_t \mathcal{L}{\text{topo}} + \lambda_v \mathcal{L}{\text{valid}}. \tag{13} B^=argBminLgeom+λsLstruct+λtLtopo+λvLvalid.(13)
其中:
- L geom \mathcal{L}_{\text{geom}} Lgeom:曲面、曲线、交线位置误差
- L struct \mathcal{L}_{\text{struct}} Lstruct:patch coherence、edge continuity、corner consistency
- L topo \mathcal{L}_{\text{topo}} Ltopo:adjacency / incidence / loop consistency
- L valid \mathcal{L}_{\text{valid}} Lvalid:watertightness、orientation、parameter-domain legality
这就是为什么 BrepGaussian 不应被轻描淡写理解为"GS + CAD 后处理"。迈不过的难点还是那个:几何和拓扑必须同时闭合。
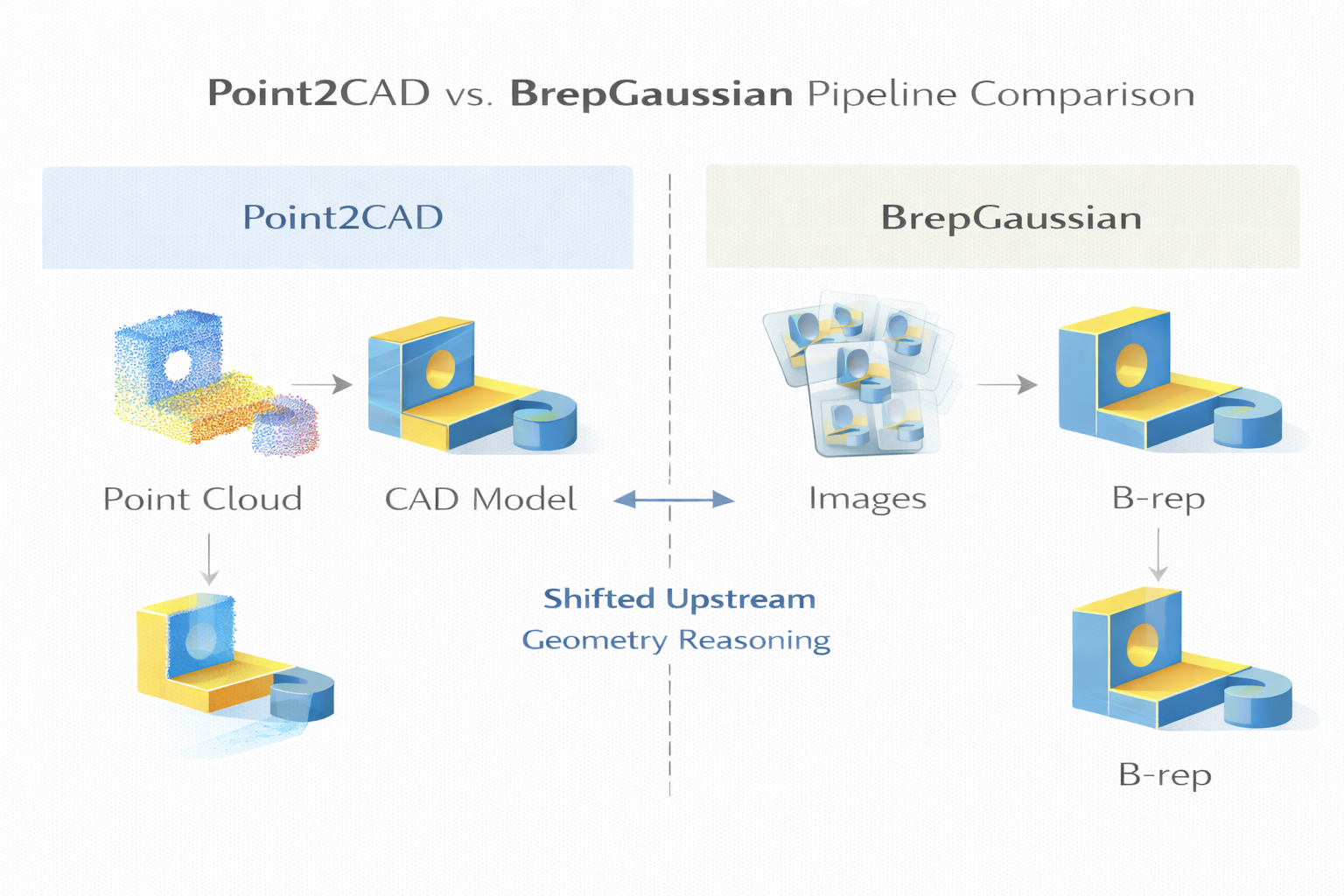
2.6 与 Point2CAD 的本质差异
Point2CAD 的链路可以概括为:
point cloud → surface clusters → fitted surfaces → edges → corners → B-rep . (14) \text{point cloud} \rightarrow \text{surface clusters} \rightarrow \text{fitted surfaces} \rightarrow \text{edges} \rightarrow \text{corners} \rightarrow \text{B-rep}. \tag{14} point cloud→surface clusters→fitted surfaces→edges→corners→B-rep.(14)
而 BrepGaussian 的链路是:
images → Gaussian intermediate layer → labeled points → structured fitting / assembly → B-rep . (15) \text{images} \rightarrow \text{Gaussian intermediate layer} \rightarrow \text{labeled points} \rightarrow \text{structured fitting / assembly} \rightarrow \text{B-rep}. \tag{15} images→Gaussian intermediate layer→labeled points→structured fitting / assembly→B-rep.(15)
-
更低输入门槛:BrepGaussian 直接从图像出发,不要求高质量 3D 点云扫描。
-
更强图像证据利用:edge / patch 信号在多视图渲染闭环中被学习,而不是完全依赖后端几何分割。
-
更高歧义与几何不稳定性:因为它少了一层原生 3D 点采样约束,前端图像歧义、纹理缺失、遮挡、视角不足都会直接影响后续拓扑链条。
2.7 离工业可用还有多远
这里必须保持保守判断。根据当前公开信息,BrepGaussian 距离工业可用仍有明显距离,至少表现在以下方面:
-
自由曲面精度不足:当前公开拟合的 primitive 仍主要集中在 plane / cylinder / sphere,尚未覆盖高精度自由曲面与复杂 trimmed NURBS。
-
复杂裁剪拓扑尚不充分:面对多重 loop、嵌套孔洞、复杂参数域裁剪时,公开结果还不足以证明其稳健性。
-
多零件装配问题未被系统验证:现实工业对象常包含多零件、多层级配合与跨零件接触关系,当前公开实验多聚焦单体对象。
-
尺度精度与测量可信度未知:对于工程系统,毫米级甚至更严的公差是关键;而 image-to-B-rep 链路中的尺度稳定性尚未被充分证明。
-
真实场景鲁棒性有限:对于以下情况,当前公开实验并不足以支持高信心外推:
- 高光 / 反光
- 遮挡
- 弱纹理
- 稀疏视角
- 视角基线不足
-
patch over-segmentation / under-segmentation:这会直接破坏后端 primitive fitting 与 topology assembly。
-
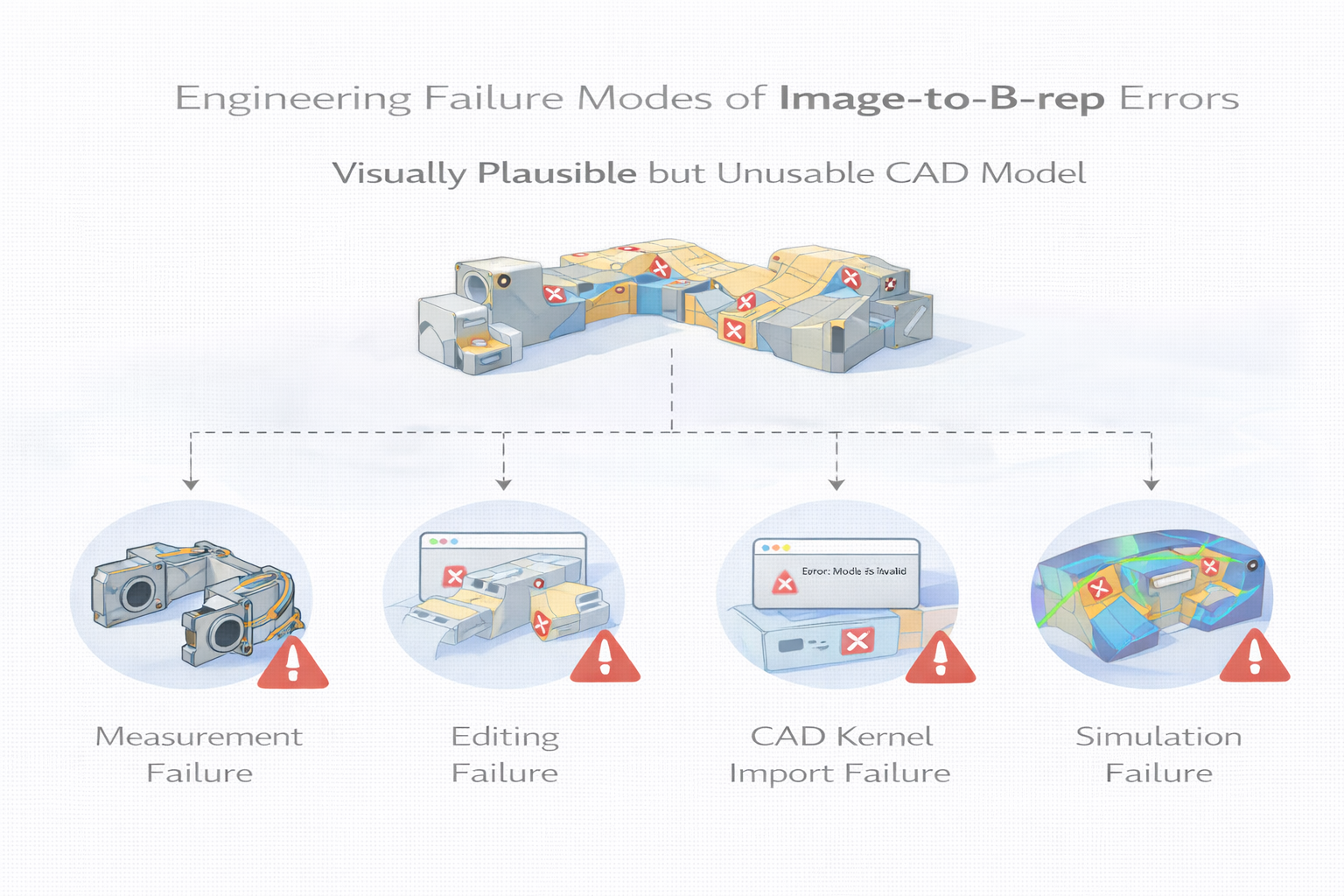
topology legality verification 仍不充分:即使生成了"看起来闭合"的结果,也不等于能稳定通过 CAD kernel 的合法性检查。
-
与现有 CAD kernel 的兼容性尚待验证:真实工业交付要求与 STEP、Parasolid、OpenCascade 等系统对接,而这不仅要求 geometry 对,还要求 topology / tolerance / trimming / orientation 都符合内核约束。
小结
它第一次在研究上证明:图像 → \rightarrow → 高斯中间层 → \rightarrow → 参数化几何元 → \rightarrow → B-rep 装配,这条路线开始具备可行性。
但必须同时承认:
- 它还没有解决高精度自由曲面主线问题
- 它还没有证明复杂工业拓扑的稳定恢复
- 它还没有达到可规模化工业交付的成熟度
因此,对企业技术团队而言,BrepGaussian 更适合作为高端前沿布局方向,而不是近期可直接替换现有 CAD 逆向链路的现成方案。
3. 数学与算法深挖专题:拓扑、曲面相交、误差传播
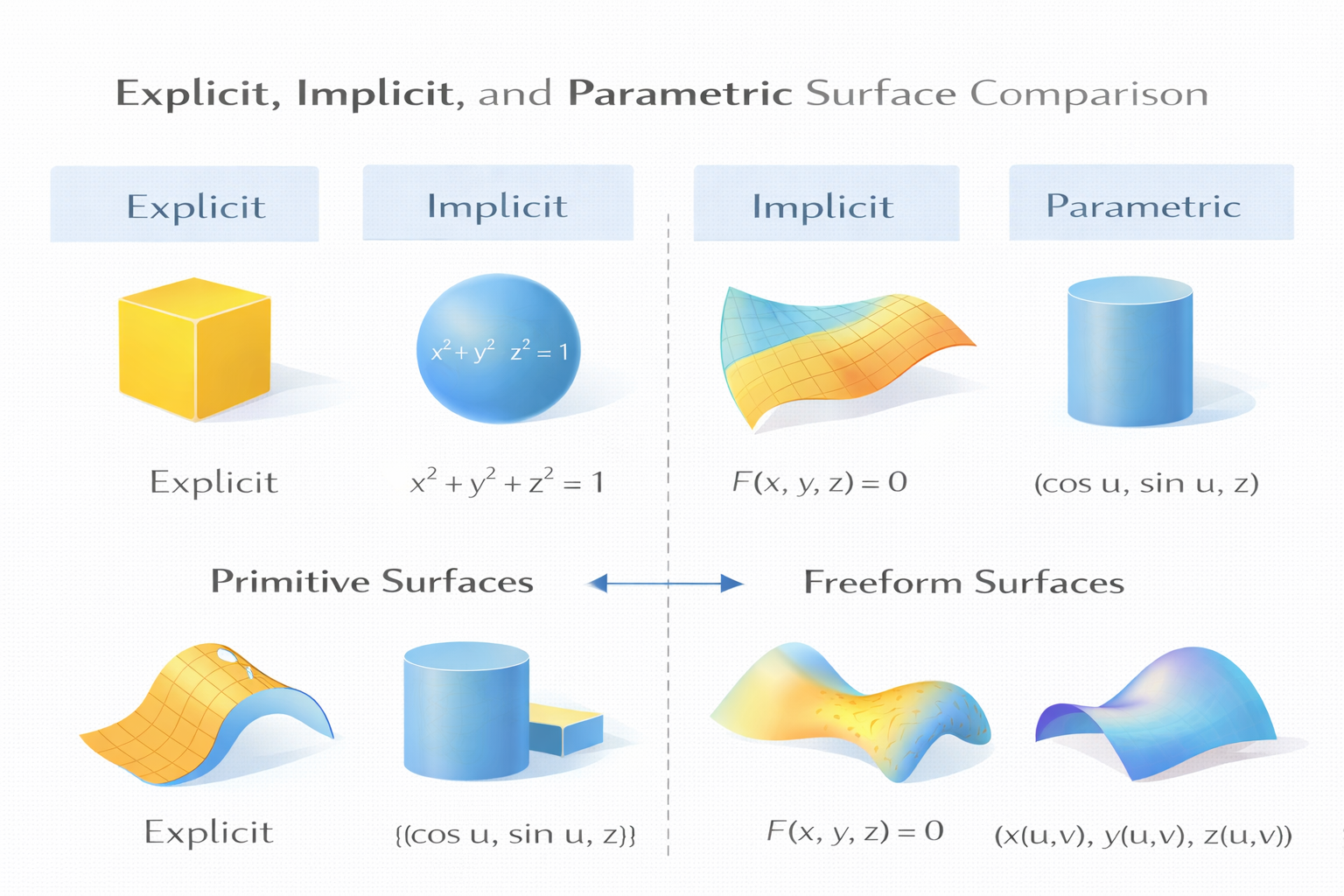
3.1 参数曲面与工程曲面
回顾一下,在工程几何中,曲面至少可分为三类表示。
(1)显式曲面
例如:
z = f ( x , y ) . (16) z=f(x,y). \tag{16} z=f(x,y).(16)
优点是表达直接,但对垂直切面、多值表面、闭合体边界支持较弱。
(2)隐式曲面
例如:
f ( x , y , z ) = 0. (17) f(x,y,z)=0. \tag{17} f(x,y,z)=0.(17)
隐式曲面适合表达闭合边界、布尔运算、全局法向,但要恢复参数域与 trimming 往往并不直接。
(3)参数曲面
例如:
S ( u , v ) = ( x ( u , v ) , y ( u , v ) , z ( u , v ) ) . (18) S(u,v)=(x(u,v),y(u,v),z(u,v)). \tag{18} S(u,v)=(x(u,v),y(u,v),z(u,v)).(18)
参数曲面是 B-rep 的核心几何对象,因为它不仅定义三维位置,还显式提供参数域 Ω \Omega Ω,从而允许 trimming curve 在参数空间中定义。
工程中常见的曲面又可进一步分为:
- primitive surfaces:plane、cylinder、sphere、cone、torus
- freeform surfaces:Bezier、B-spline、NURBS 等
primitive surfaces 的优势在于:
- 参数量少
- 拟合稳定
- 解析相交更容易
- 工程解释明确
freeform surfaces 的优势在于表达能力强,但带来的难度包括:
- 参数域分配
- 控制网格估计
- 节点向量选择
- trimming 边界恢复
- 曲面相交求解
因此,BrepGaussian 当前聚焦 canonical primitives 并不是偶然,而是因为这是 image-to-B-rep 路线上当前最可控的技术切入点。
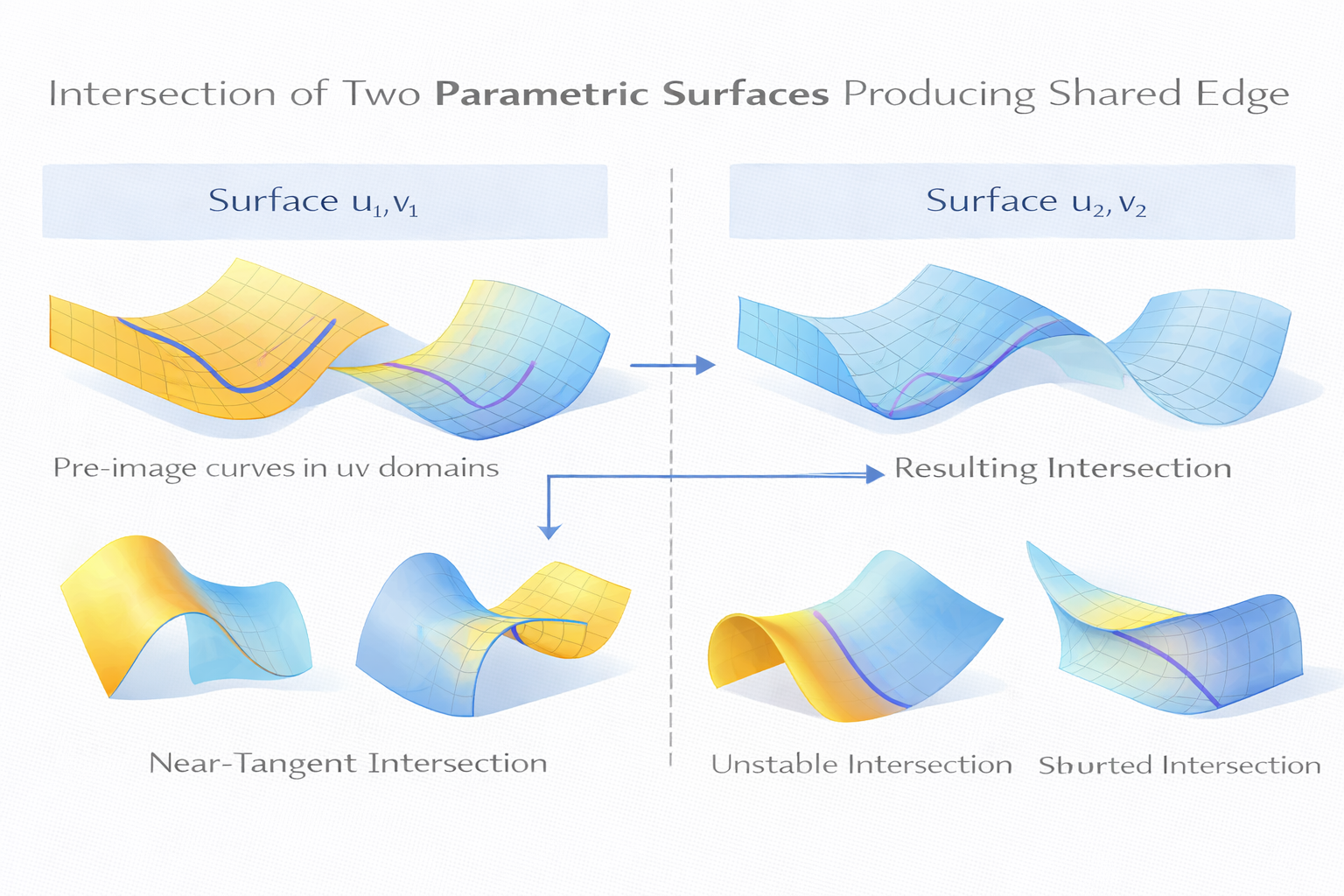
3.2 曲面相交与边生成
对两个曲面 S i S_i Si 与 S j S_j Sj,理想情况下,共享边可定义为:
e i j ( t ) = S i ( u i ( t ) , v i ( t ) ) = S j ( u j ( t ) , v j ( t ) ) . (19) e_{ij}(t)=S_i(u_i(t),v_i(t))=S_j(u_j(t),v_j(t)). \tag{19} eij(t)=Si(ui(t),vi(t))=Sj(uj(t),vj(t)).(19)
这意味着一条合法边必须同时满足:
- 在三维空间中位于两个曲面上;
- 在两个曲面的参数域中分别有一致前像;
- 在边界范围上具有明确有效区间。
在解析几何层面,这可抽象为求解:
S i ( u , v ) − S j ( ξ , η ) = 0. (20) S_i(u,v)-S_j(\xi,\eta)=0. \tag{20} Si(u,v)−Sj(ξ,η)=0.(20)
这是一个高维非线性系统,数值上通常非常困难。尤其在以下情况下更不稳定:
- 曲面几乎相切
- 曲面法向接近平行
- patch overlap / underlap
- 数据有噪声
- 曲面拟合本身已有偏差
因此,现实系统常不会直接做"完美解析交线",而会采用:
- primitive-specific analytic intersection
- sampling + optimization
- mesh-based approximation
- interval clipping + robust fitting
Point2CAD 之所以将 freeform surfaces 转换为 triangle meshes 再求交,恰恰说明:曲面相交本身就是 CAD reconstruction 中的高难度数值环节。
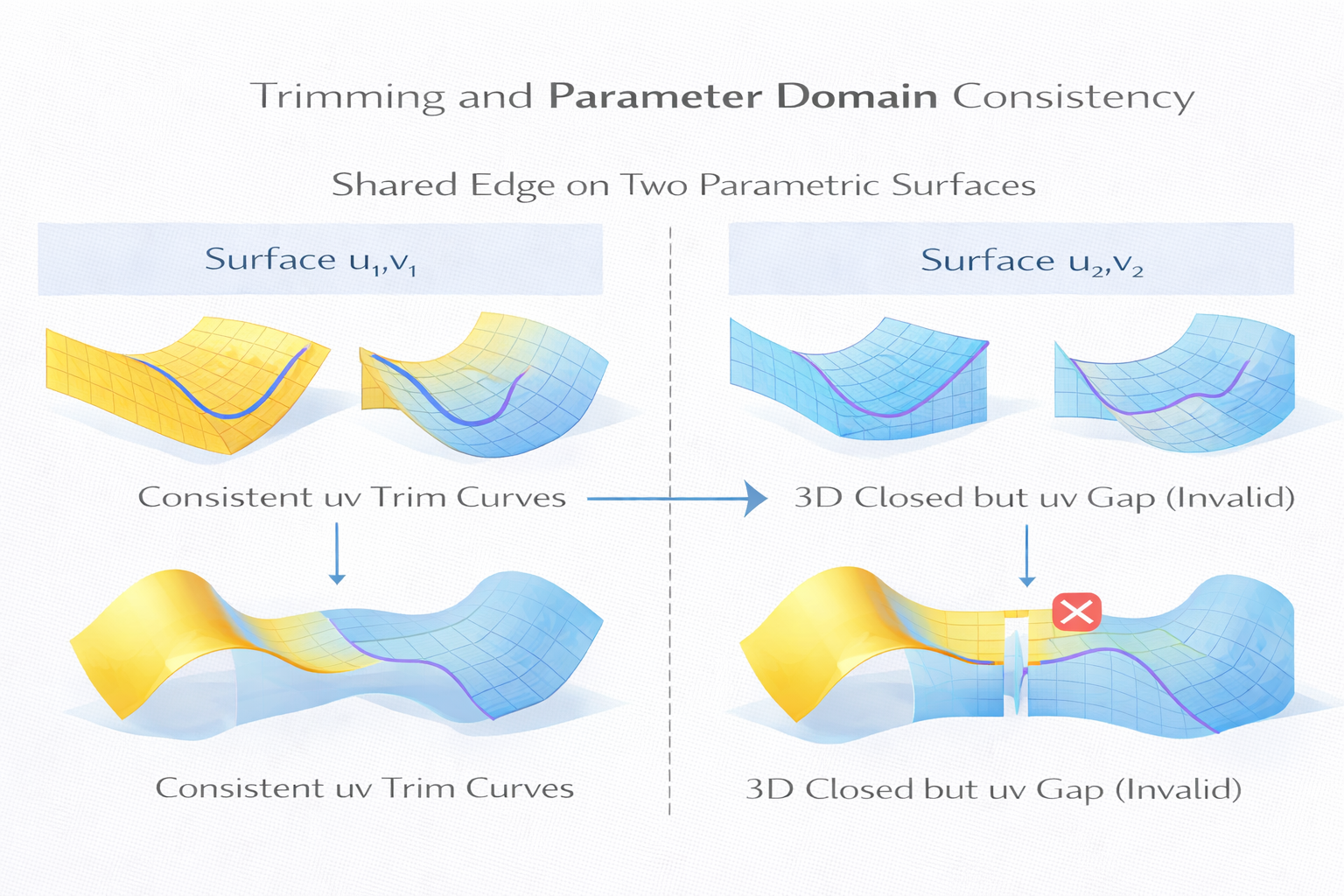
3.3 trimming 与 parameter domain consistency
对一个参数曲面 S i ( u , v ) S_i(u,v) Si(u,v),其有效面片不是整张曲面,而是参数域 Ω i \Omega_i Ωi 中被 trimming loop 限定的子区域。
设 trimming loop 为:
γ i : 0 , 1 → Ω i , γ i ( 0 ) = γ i ( 1 ) , (21) \gamma_i:0,1\rightarrow \Omega_i, \qquad \gamma_i(0)=\gamma_i(1), \tag{21} γi:0,1→Ωi,γi(0)=γi(1),(21)
则其三维边界映射为:
Γ i ( t ) = S i ( γ i ( t ) ) . (22) \Gamma_i(t)=S_i(\gamma_i(t)). \tag{22} Γi(t)=Si(γi(t)).(22)
这里有一个关键的工程要求:边界曲线既要在三维空间中一致,也要在曲面参数域中一致。
意味着若两个 faces 共享同一条边,则不仅需要:
Γ i ( t ) = Γ j ( t ) , (23) \Gamma_i(t)=\Gamma_j(t), \tag{23} Γi(t)=Γj(t),(23)
还需要它们在各自参数域中的前像都合法、闭合、方向兼容、无 gap。这就是为什么 trimmed NURBS 比普通 patch 拼接难得多:
- 普通 patch 拼接只关心几何连接
- trimmed surfaces 还必须维护参数域边界语义
- 共享边往往要同时服务于两个曲面的参数化表达
- 一旦 parameter domain consistency 破坏,CAD kernel 很可能判定面无效
OpenCascade 的修复文档中,wire 在 3D 中闭合、但在参数空间存在 gap 的情况,就是典型实例。
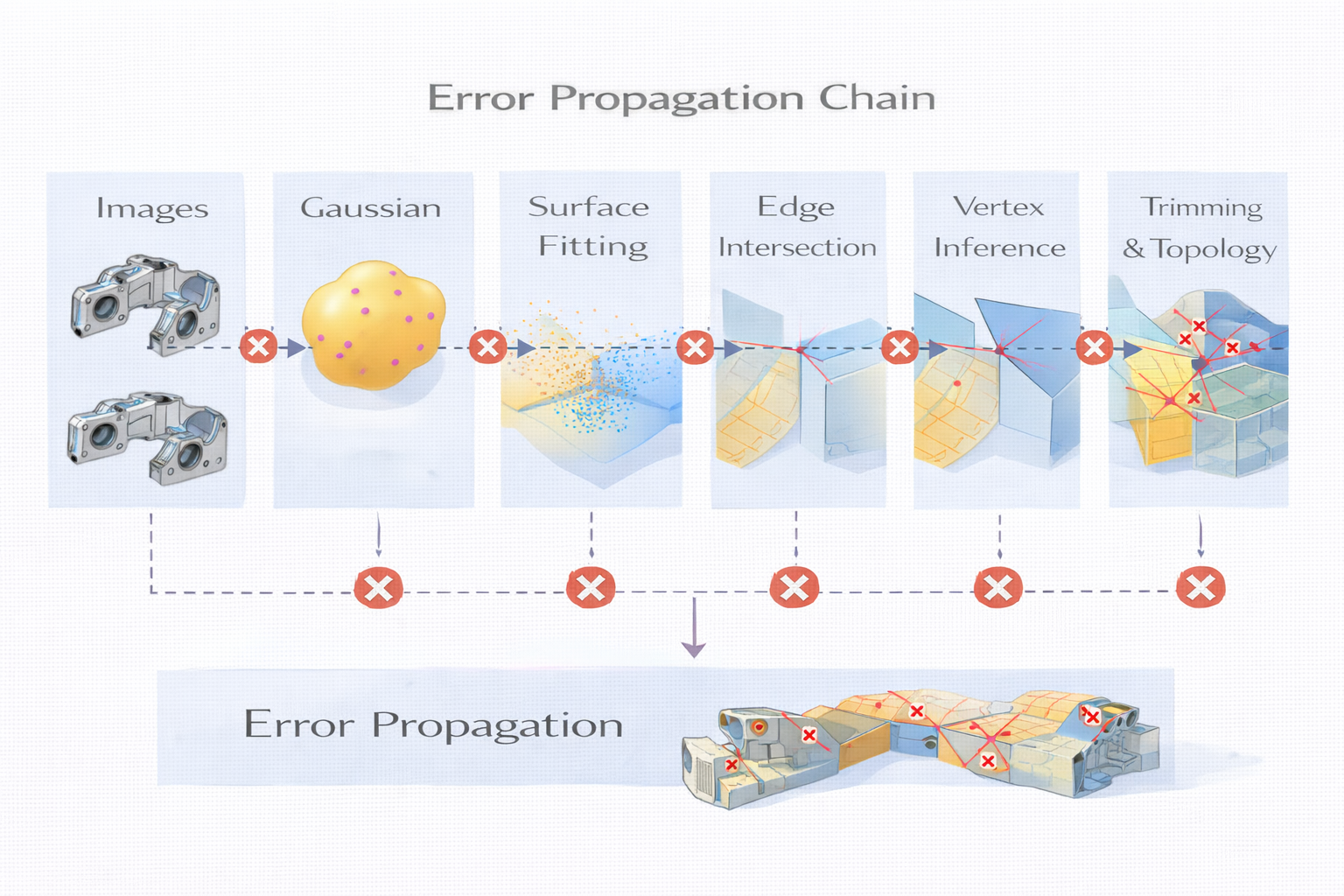
3.4 误差传播链条
图像到 B-rep 的误差传播,可以抽象写成:
δ I → δ G → δ S → δ e → δ v → δ T → δ B . (24) \delta I \rightarrow \delta G \rightarrow \delta S \rightarrow \delta e \rightarrow \delta v \rightarrow \delta \mathcal{T} \rightarrow \delta \mathcal{B}. \tag{24} δI→δG→δS→δe→δv→δT→δB.(24)
其中:
- δ I \delta I δI:图像噪声、分割误差、遮挡、反光等观测误差
- δ G \delta G δG:Gaussian 位置、协方差、特征标签误差
- δ S \delta S δS:局部曲面拟合误差
- δ e \delta e δe:曲面相交得到的边误差
- δ v \delta v δv:角点推断误差
- δ T \delta \mathcal{T} δT:trimming / adjacency / incidence 偏差
- δ B \delta \mathcal{B} δB:最终 B-rep 拓扑与合法性偏差
若做一个保守的链式放大抽象,可写为:
∥ δ B ∥ ≤ L T L V L E L S L G ∥ δ I ∥ , (25) \|\delta \mathcal{B}\| \le L_T L_V L_E L_S L_G \|\delta I\|, \tag{25} ∥δB∥≤LTLVLELSLG∥δI∥,(25)
其中:
- L G L_G LG:图像到 Gaussian 的敏感度
- L S L_S LS:Gaussian 到 surface fitting 的敏感度
- L E L_E LE:surface 到 edge intersection 的敏感度
- L V L_V LV:edge 到 vertex inference 的敏感度
- L T L_T LT:vertex / trim 到 topology validity 的敏感度
这个表达虽然是理论抽象,但本质在于:B-rep 恢复是链式误差放大系统,而不是平坦的单阶段回归问题。
3.5 链式误差的工程后果
对企业系统来说,image-to-B-rep 最大的风险不是"效果差一点",而是直接:结果在工程链路中根本不可消费。
小结
本节可以归结为三个判断:
- 边不是检测出来的轮廓线而已,它本质上是曲面关系的结果。
- trim 不是后处理修边,而是参数域与三维域的双重一致性问题。
- B-rep 恢复中的误差不是局部独立噪声,而是沿几何---拓扑链条级联传播。
这也是为什么 BrepGaussian 的难点不在"能不能拟合几个 primitives",而在于:如何让图像域中的不确定性,经过 Gaussian 中间层与几何拟合后,仍然能被约束在合法 B-rep 的容忍范围内。
参考资料: