目录
1.摘要
基于城市V2X网络中RSU部署和UAV调度的联合优化问题,本文提出了一种分层多目标规划框架,其考虑了显著的时空需求变化和操作不确定性,通过上层搜索非支配的基础设施配置,平衡总成本、时空覆盖和鲁棒性;下层通过状态感知的贪心调度策略评估每个配置,明确建模UAV的操作模式和电池/充电动态。鲁棒性通过冗余、覆盖变化和任务平衡的加权组合优化,并通过情景条件风险值(CVaR)评估需求扰动和组件故障下的尾部风险。
2.系统模型与问题表述
网络拓扑与组件
本文提出了一种联合规划方法,优化城市V2X网络中的RSU部署和UAV调度。RSU覆盖半径为800米,UAV服务半径为600米,UAV舰队规模 N U = ∑ i = 1 N R n i N_U=\sum_{i=1}^{N_R}n_i NU=i=1∑NRni
操作动态与状态管理
UAV操作包含五个状态:IDLE、DEPLOYING、COVERING、RETURNING 和 CHARGING。状态转移受任务分配、电池电量和操作约束控制。
状态转移和电池电量更新:
s j ( τ + 1 ) = { DEPLOYING if s j ( τ ) = IDLE ∧ assigned ( τ ) COVERING if s j ( τ ) = DEPLOYING ∧ reached_target RETURNING if E j ( τ ) < E return ∨ mission_complete CHARGING if s j ( τ ) = RETURNING ∧ at_base IDLE if s j ( τ ) = CHARGING ∧ E j ( τ ) ≥ E full s_j(\tau + 1) = \begin{cases} \text{DEPLOYING} & \text{if } s_j(\tau) = \text{IDLE} \land \text{assigned}(\tau) \\ \text{COVERING} & \text{if } s_j(\tau) = \text{DEPLOYING} \land \text{reached\target} \\ \text{RETURNING} & \text{if } E_j(\tau) < E{\text{return}} \lor \text{mission\_complete} \\ \text{CHARGING} & \text{if } s_j(\tau) = \text{RETURNING} \land \text{at\base} \\ \text{IDLE} & \text{if } s_j(\tau) = \text{CHARGING} \land E_j(\tau) \geq E{\text{full}} \end{cases} sj(τ+1)=⎩ ⎨ ⎧DEPLOYINGCOVERINGRETURNINGCHARGINGIDLEif sj(τ)=IDLE∧assigned(τ)if sj(τ)=DEPLOYING∧reached_targetif Ej(τ)<Ereturn∨mission_completeif sj(τ)=RETURNING∧at_baseif sj(τ)=CHARGING∧Ej(τ)≥Efull
电池电量更新:
E j ( τ ) = E j ( τ − 1 ) − P ( s j ( τ ) ) Δ τ , E j ( τ ) ≥ E m i n , ∀ j , τ E_j(\tau)=E_j(\tau-1)-P(s_j(\tau))\Delta\tau,\quad E_j(\tau)\geq E_\mathrm{min},\forall j,\tau Ej(τ)=Ej(τ−1)−P(sj(τ))Δτ,Ej(τ)≥Emin,∀j,τ
覆盖模型与服务质量
本文通过离散化服务区域为需求单元 G = { g 1 , ... , g N } \mathcal{G} = \{g_1, \dots, g_N\} G={g1,...,gN}来建模覆盖,每个单元 g k g_k gk在时段 ℓ \ell ℓ被认为是覆盖的,如果至少一个基础设施元素(RSU或UAV)提供足够的信号质量。覆盖公式:
c k , ℓ = max { max i : x i = 1 I d ( g k , r i ) ≤ R RSU , max j ∈ U ℓ I d ( g k , pos j ( ℓ ) ) ≤ R SVC } c_{k,\ell} = \max \left\{ \max_{i: x_i = 1} Id(g_k, r_i) \\le R_{\\text{RSU}}, \max_{j \in \mathcal{U}_\ell} Id(g_k, \\text{pos}_j(\\ell)) \\le R_{\\text{SVC}} \right\} ck,ℓ=max{i:xi=1maxId(gk,ri)≤RRSU,j∈UℓmaxId(gk,posj(ℓ))≤RSVC}
服务质量通过平均覆盖度 c ˉ k \bar{c}k cˉk、总覆盖度 C ˉ \bar{C} Cˉ和空间异质性 σ C 2 \sigma_C^2 σC2来评估。冗余度通过固定RSU冗余 ρ k \rho_k ρk来衡量,系统鲁棒性结合了冗余、空间均匀性和任务平衡,表示为:
R sys = ω 1 ρ ^ + ω 2 ( 1 − σ C 2 ) + ω 3 U m R{\text{sys}} = \omega_1 \hat{\rho} + \omega_2 (1 - \sigma_C^2) + \omega_3 U_m Rsys=ω1ρ^+ω2(1−σC2)+ω3Um
其中, ρ ^ \hat{\rho} ρ^ 是标准化后的RSU冗余, U m U_m Um 表示任务均匀性。
成本结构与风险评估
总系统成本 F F F包含基础设施获取成本和运营开支:
F = C RSU N RSU + C UAV N UAV + 24 C op ( N RSU + N UAV ) F=C_\text{RSU}N_\text{RSU}+C_\text{UAV}N_\text{UAV}+24C_\text{op}(N_\text{RSU}+N_\text{UAV}) F=CRSUNRSU+CUAVNUAV+24Cop(NRSU+NUAV)
其中, N R S U = ∑ i x i N_\mathrm{RSU}=\sum_ix_i NRSU=∑ixi, N U A V = ∑ i n i N_\mathrm{UAV}=\sum_in_i NUAV=∑ini,且 C o p C_\mathrm{op} Cop是每小时的运营成本。
为应对操作不确定性 (如交通波动和设备故障),本文使用条件价值(CVaR)来量化尾部风险。对于性能指标 Y Y Y在不确定性场景 Ω = { ω 1 , ... , ω S } \Omega=\{\omega_1,\ldots,\omega_S\} Ω={ω1,...,ωS}下,CVaR计算公式为:
C V a R α ( Y ) = 1 ( 1 − α ) S ∑ s : Y ( ω s ) ≥ V a R α Y ( ω s ) \mathrm{CVaR}\alpha(Y)=\frac{1}{(1-\alpha)S}\sum{s:Y(\omega_s)\geq\mathrm{VaR}_\alpha}Y(\omega_s) CVaRα(Y)=(1−α)S1s:Y(ωs)≥VaRα∑Y(ωs)
其中,VaRα 是α-分位数,CVaR衡量在最坏 ( 1 − α ) (1-\alpha) (1−α)场景下的预期损失。
分层优化问题
分层多目标优化问题包含上层基础设施部署与下层UAV调度,上层目标包含最小化成本 f 1 f_1 f1,最大化覆盖度 f 2 f_2 f2和鲁棒性 f 3 f_3 f3。
成本最小化:
f 1 = C R S U N R S U + C U A V N U A V + 24 C o p ( N R S U + N U A V ) f_{1}=C_{\mathrm{RSU}}N_{\mathrm{RSU}}+C_{\mathrm{UAV}}N_{\mathrm{UAV}}+24C_{\mathrm{op}}(N_{\mathrm{RSU}}+N_{\mathrm{UAV}}) f1=CRSUNRSU+CUAVNUAV+24Cop(NRSU+NUAV)
覆盖度最大化:
f 2 = 1 N T ∑ ℓ = 1 N T ∑ k = 1 N G c k , ℓ f_2=\frac{1}{N_T}\sum_{\ell=1}^{N_T}\sum_{k=1}^{N_G}c_{k,\ell} f2=NT1ℓ=1∑NTk=1∑NGck,ℓ
鲁棒性最大化:
f 3 = 1 N G ∑ k = 1 N G w k c ˉ k f_3=\frac{1}{N_G}\sum_{k=1}^{N_G}w_k\bar{c}_k f3=NG1k=1∑NGwkcˉk
下层UAV调度通过最小化覆盖短缺 Φ ( x , n , S ) \Phi(x,n,S) Φ(x,n,S)实现:
Φ ( x , n , S ) = min S ∑ k = 1 N G ∑ ℓ = 1 N T w k , ℓ ( 1 − c k , ℓ ) \Phi(x,n,S)=\min_S\sum_{k=1}^{N_G}\sum_{\ell=1}^{N_T}w_{k,\ell}(1-c_{k,\ell}) Φ(x,n,S)=Smink=1∑NGℓ=1∑NTwk,ℓ(1−ck,ℓ)
通信模型
RSU到车辆通信 接收信号功率 P r x ( q ) P_\mathrm{rx}(q) Prx(q)在车辆位置 q q q由以下公式表示:
P r x ( q ) = P t x ( i ) G t x G r x L − 1 ( d i , q ) P_\mathrm{rx}(q)=P_\mathrm{tx}(i)G_\mathrm{tx}G_\mathrm{rx}L^{-1}(d_{i,q}) Prx(q)=Ptx(i)GtxGrxL−1(di,q)
路径损耗 L ( d ) L(d) L(d)由距离 d i , q d_{i,q} di,q和阴影衰减模型描述:
L ( d ) = L 0 ( d d 0 ) α 10 χ 10 , χ ∼ N ( 0 , σ s h 2 ) L(d)=L_0\left(\frac{d}{d_0}\right)^\alpha10^{\frac{\chi}{10}},\quad\chi\sim\mathcal{N}(0,\sigma_{\mathrm{sh}}^2) L(d)=L0(d0d)α1010χ,χ∼N(0,σsh2)
UAV到车辆通信由于UAV的高度,空地通信表现出不同的传播特性。LoS概率为:
P L o S ( θ ) = 1 1 + a exp ( − b ( θ − a ) ) P_{\mathrm{LoS}}(\theta)=\frac1{1+a\exp(-b(\theta-a))} PLoS(θ)=1+aexp(−b(θ−a))1
综合路径损耗 L U A V ( d , h ) L_\mathrm{UAV}(d,h) LUAV(d,h)结合了LoS和NLoS条件:
L U A V ( d , h ) = P L o S ( θ ) L L o S ( d ) + 1 − P L o S ( θ ) L N L o S ( d ) L_{\mathrm{UAV}}(d,h)=P_{\mathrm{LoS}}(\theta)L_{\mathrm{LoS}}(d)+1-P_{\\mathrm{LoS}}(\\theta)L_{\mathrm{NLoS}}(d) LUAV(d,h)=PLoS(θ)LLoS(d)+1−PLoS(θ)LNLoS(d)
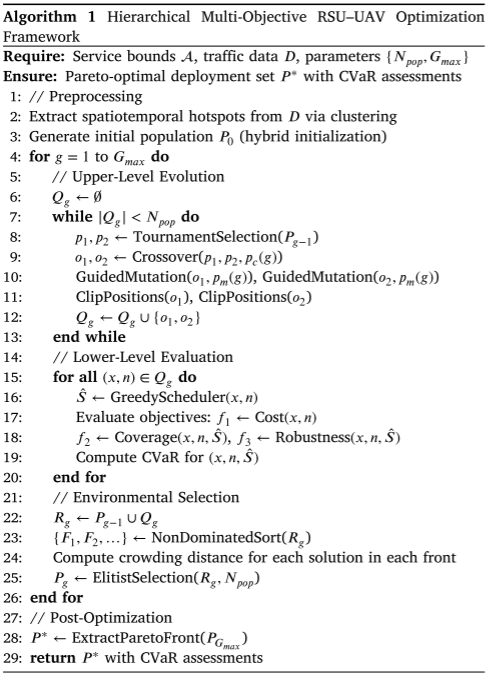
3.提出的算法
上层:多目标基础设施优化
上层基于NSGA-II框架,解通过二进制RSU部署掩码 x x x、RSU坐标和UAV分配向量 n n n编码。初始种群由70%随机采样和30%基于知识的种子构成。
下层:贪心UAV任务调度
下层采用贪心启发式算法,调度器根据权重 w k , ℓ w_{k,\ell} wk,ℓ对需求单元进行排序,并选择可
用且电池足够的UAV进行任务。选择最靠近UAV,确保其电量足够完成任务并安全返回:
j ∗ = arg min j ∈ U avail d ( pos j , g k ) s.t. E j ≥ E flight ( j , g k ) + E return ( j ) j^*=\arg\min_{j\in\mathcal{U}\text{avail}}d(\text{pos}j,g_k)\quad\text{s.t.}\quad E_j\ge E\text{flight}(j,g_k)+E\text{return}(j) j∗=argj∈Uavailmind(posj,gk)s.t.Ej≥Eflight(j,gk)+Ereturn(j)
基于CVaR的风险评估
对于每个Pareto最优解和场景 ω s \omega_s ωs,本文评估扰动后的覆盖短缺 Y ( ω s ) = 1 − C ˉ ( ω s ) Y(\omega_s)=1-\bar{C}(\omega_s) Y(ωs)=1−Cˉ(ωs)。
CVaR在置信度 α = 0.95 \alpha=0.95 α=0.95下量化最差5%场景中的期望短缺
C V a R 0.95 ( Y ) = 1 0.05 S ∑ s : Y ( ω s ) ≥ V a R 0.95 Y ( ω s ) \mathrm{CVaR}{0.95}(Y)=\frac{1}{0.05S}\sum{s:Y(\omega_s)\geq\mathrm{VaR}_{0.95}}Y(\omega_s) CVaR0.95(Y)=0.05S1s:Y(ωs)≥VaR0.95∑Y(ωs)
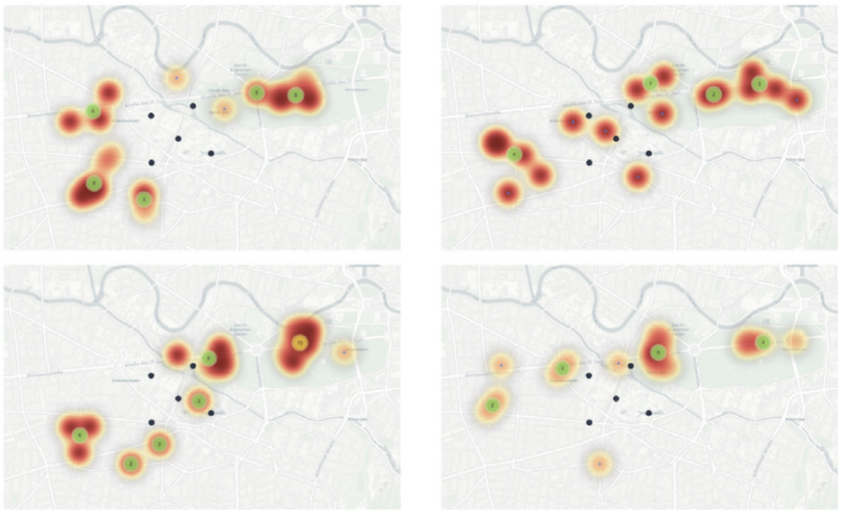
4.结果展示
5.参考文献
1 Guo W, Xiao Y, Cheng S, et al. Risk-aware hierarchical multi-objective planning of RSU deployment and UAV scheduling for urban V2X networksJ. Swarm and Evolutionary Computation, 2026, 103: 102348.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx