基于 MATLAB 编写的扩展卡尔曼滤波(EKF)仿真程序。该代码旨在模拟和验证 EKF 算法在处理非线性系统时的状态估计性能,具体场景设定为惯性导航系统(INS)与多普勒测速仪(DVL)的数据融合。
如有程序答疑等需求,可通过文末的卡片联系作者
文章目录
代码概述
该程序构建了一个三轴速度估计的仿真环境。它通过生成带有噪声的"真实"运动轨迹和观测数据,分别对比了"未滤波(仅惯性推算)"与"EKF 滤波"两种情况下的估计精度,直观展示了多传感器融合在抑制误差发散方面的优势。
核心模块
-
仿真环境与参数初始化
-
运动模型(状态方程)
-
观测模型(量测方程)
-
EKF 核心算法
这是代码的主体部分,实现了标准的扩展卡尔曼滤波流程:
-
状态预测(Time Update):
利用非线性运动方程预测下一时刻的状态 X p r e X_{pre} Xpre。
X p r e = f ( X e k f , k − 1 ) + w k X_{pre} = f(X_{ekf, k-1}) + w_k Xpre=f(Xekf,k−1)+wk -
雅可比矩阵计算(线性化):
由于 X 轴运动方程是非线性的,代码计算了状态转移矩阵 F F F(即雅可比矩阵 ∂ f ∂ x \frac{\partial f}{\partial x} ∂x∂f):
F 1 , 1 = 1 + 2.5 ( 1 − v x 2 ) ( 1 + v x 2 ) 2 F_{1,1} = 1 + \frac{2.5(1 - v_x^2)}{(1 + v_x^2)^2} F1,1=1+(1+vx2)22.5(1−vx2)这是 EKF 处理非线性问题的关键步骤。
-
协方差预测:
P p r e = F P k − 1 F T + Q P_{pre} = F P_{k-1} F^T + Q Ppre=FPk−1FT+Q -
卡尔曼增益计算:
K k = P p r e H T ( H P p r e H T + R ) − 1 K_k = P_{pre} H^T (H P_{pre} H^T + R)^{-1} Kk=PpreHT(HPpreHT+R)−1其中观测矩阵 H H H 为单位矩阵。
-
状态更新(Measurement Update):
利用观测值 Z Z Z 修正预测值:
X e k f , k = X p r e + K k ( Z k − Z ^ ) X_{ekf, k} = X_{pre} + K_k (Z_k - \hat{Z}) Xekf,k=Xpre+Kk(Zk−Z^)
P k = ( I − K k H ) P p r e P_k = (I - K_k H) P_{pre} Pk=(I−KkH)Ppre
- 结果可视化与评估
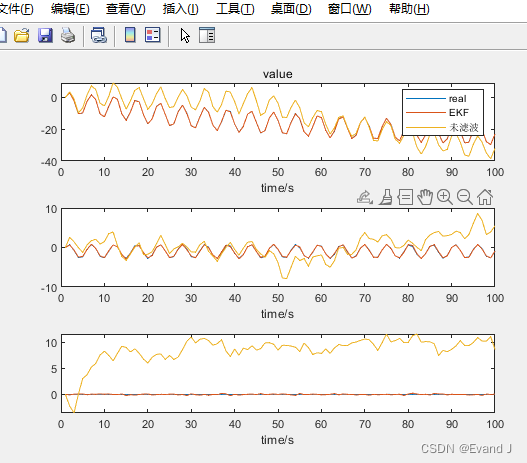
- 轨迹对比图: 绘制了"真实值"、"EKF 估计值"和"未滤波值"的对比曲线,直观展示 EKF 如何紧贴真实轨迹。
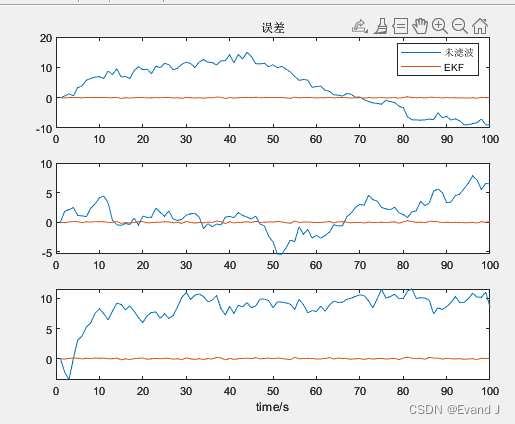
- 误差分析图: 绘制了未滤波误差与 EKF 滤波误差的对比,显示 EKF 显著降低了误差幅值。
- 定量输出: 在命令行窗口打印 X、Y、Z 三轴速度误差的最大绝对值,量化滤波效果。
运行结果
三轴速度对比:
估计误差对比:
源代码
部分代码:
matlab
% EKF融合INS与DVL的核心程序
clear;clc;close all;
rng(0); %注释此行可以在每次运行时使用不同的随机数
%% 滤波模型初始化
t = 1:1:100;
Q = 1*diag([1,1,1]);w=sqrt(Q)*randn(size(Q,1),length(t));
R = 0.1^2*diag([1,1,1]);v=sqrt(R)*randn(size(R,1),length(t));
P0 = 1*eye(3);
X=zeros(3,length(t)); %构建滤波状态量(三轴速度)
X_ekf=zeros(3,length(t)); %构建滤波后的输出状态
X_ekf(1,1)=X(1,1);
Z=zeros(3,length(t)); %定义观测值形式
Z(:,1)=[X(1,1);X(2,1);X(3,1)]+v(:,1); %观测量------对三轴速度进行观测
%% 运动模型
X_=zeros(3,length(t));
X_(:,1)=X(:,1);
for i1 = 2:length(t)完整代码:
https://blog.csdn.net/callmeup/article/details/136966605?spm=1011.2415.3001.5331