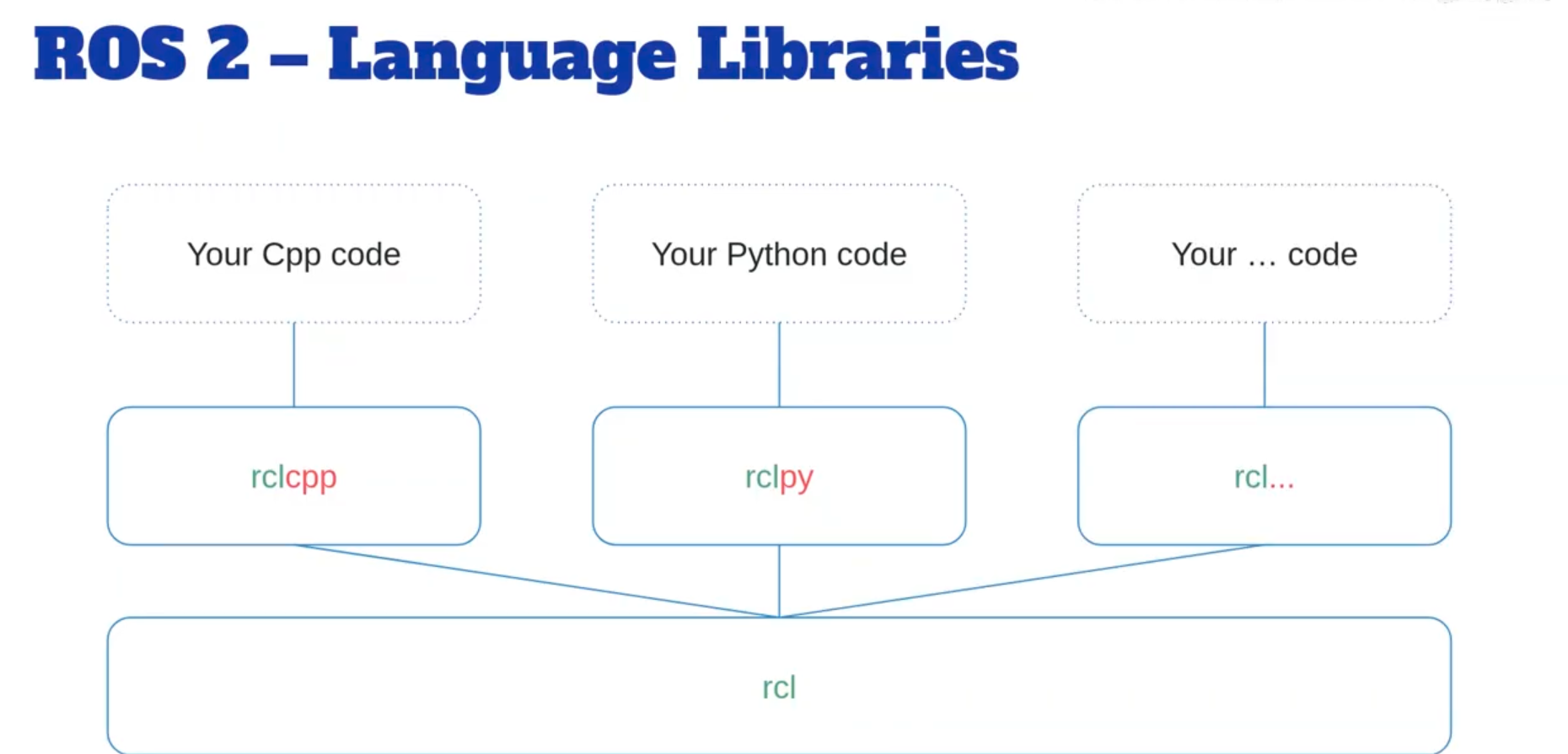
rcl
ros2的基础库,最最低级的,与ros2通信的
ros2指令
ros2 run [pkg_name] [executable filename]--ros-args -r: 重命名节点名称
示例:
ros2 run [pkg_name] [executable filename] --ros-args -r __node:=[重命名的名称]
or
ros2 run [pkg_name] [executable filename] --ros-args --remap __node:=[重命名的名称]
bash
# 看帮助手册
ros2 node -h
# 看运行中的节点
ros2 node list
# 看运行中的节点的详细信息,subscribes,publishers,service servers等等
ros2 node info [/节点名称]colcon
colcon build会build所有ros workspace/src下的所有文件--packages-select只build 指定的pkg
示例:
colcon build --packages-select [pkg name]- 针对python
--symlink-install: ros2直接运行可执行文件,这样编辑python文件不用重新build了
colcon build --packages-select [pkg name] --symlink-install
RQT
图形界面查看正在运行的节点
终端输入
bash
rqtPlugins->Introspection->Node Graph
or
bash
rqt_graphTurtlesim
bash
# 如果没安装, 一般情况下桌面版都安装了
sudo apt install ros-distro-turtlesim
# 打开模拟小乌龟的节点,也可以重命名节点
ros2 run turtlesim turtlesim_node
# 打开用键盘控制小乌龟的节点
ros2 run turtlesim turtle_teleop_key