面阵相机 vs 线阵相机:堡盟与海康相机选型差异全解析 附Python 实战演示
- [面阵 vs 线阵:工业视觉的"广角镜"与"扫描仪"](#面阵 vs 线阵:工业视觉的“广角镜”与“扫描仪”)
-
- [🔍 核心差异:一帧 vs 一行](#🔍 核心差异:一帧 vs 一行)
-
- [面阵相机 (Area Scan):瞬间的"广角镜"](#面阵相机 (Area Scan):瞬间的“广角镜”)
- [线阵相机 (Line Scan):连续的"扫描仪"](#线阵相机 (Line Scan):连续的“扫描仪”)
- [⚔️ 优缺点深度对比](#⚔️ 优缺点深度对比)
- [🛠️ Python 实战:代码层面的区别](#🛠️ Python 实战:代码层面的区别)
-
- 环境准备
- [示例 1:堡盟面阵相机 (Baumer) - "抓拍"](#示例 1:堡盟面阵相机 (Baumer) - “抓拍”)
- [示例 2:大恒线阵相机 (Line Scan) - "扫描"](#示例 2:大恒线阵相机 (Line Scan) - “扫描”)
- [⚠️ 踩坑指南与注意事项](#⚠️ 踩坑指南与注意事项)
-
- [1. Python 的 GIL 与性能](#1. Python 的 GIL 与性能)
- [2. 依赖库安装](#2. 依赖库安装)
- [3. 线阵相机的"黑边"问题](#3. 线阵相机的“黑边”问题)
- [4. 图像格式转换](#4. 图像格式转换)
- [✅ 总结](#✅ 总结)
面阵 vs 线阵:工业视觉的"广角镜"与"扫描仪"
------ 深度解析堡盟面阵与大恒线阵选型差异(附 Python 实战代码)
在机器视觉项目中,选型的第一步往往就是决定:用面阵相机(Area Scan)还是线阵相机(Line Scan)?
目前国内市场格局中,**堡盟(Baumer)凭借其简洁的 neoAPI 在高端面阵及跨平台开发领域备受青睐,而大恒图像(Daheng Imaging)**则凭借深厚的国产技术积累和高性价比,在科研及工业检测领域拥有庞大的用户群。
随着Python在AI视觉领域的普及,越来越多的工程师希望用Python直接控制工业相机。本文将以**堡盟(Baumer)面阵相机(使用 neoAPI Python Bindings)和大恒图像(Daheng)线阵相机(使用 Galaxy SDK Python API)**为例,从物理原理到 Python 代码实现,彻底讲透两者的区别与优缺点。
🔍 核心差异:一帧 vs 一行
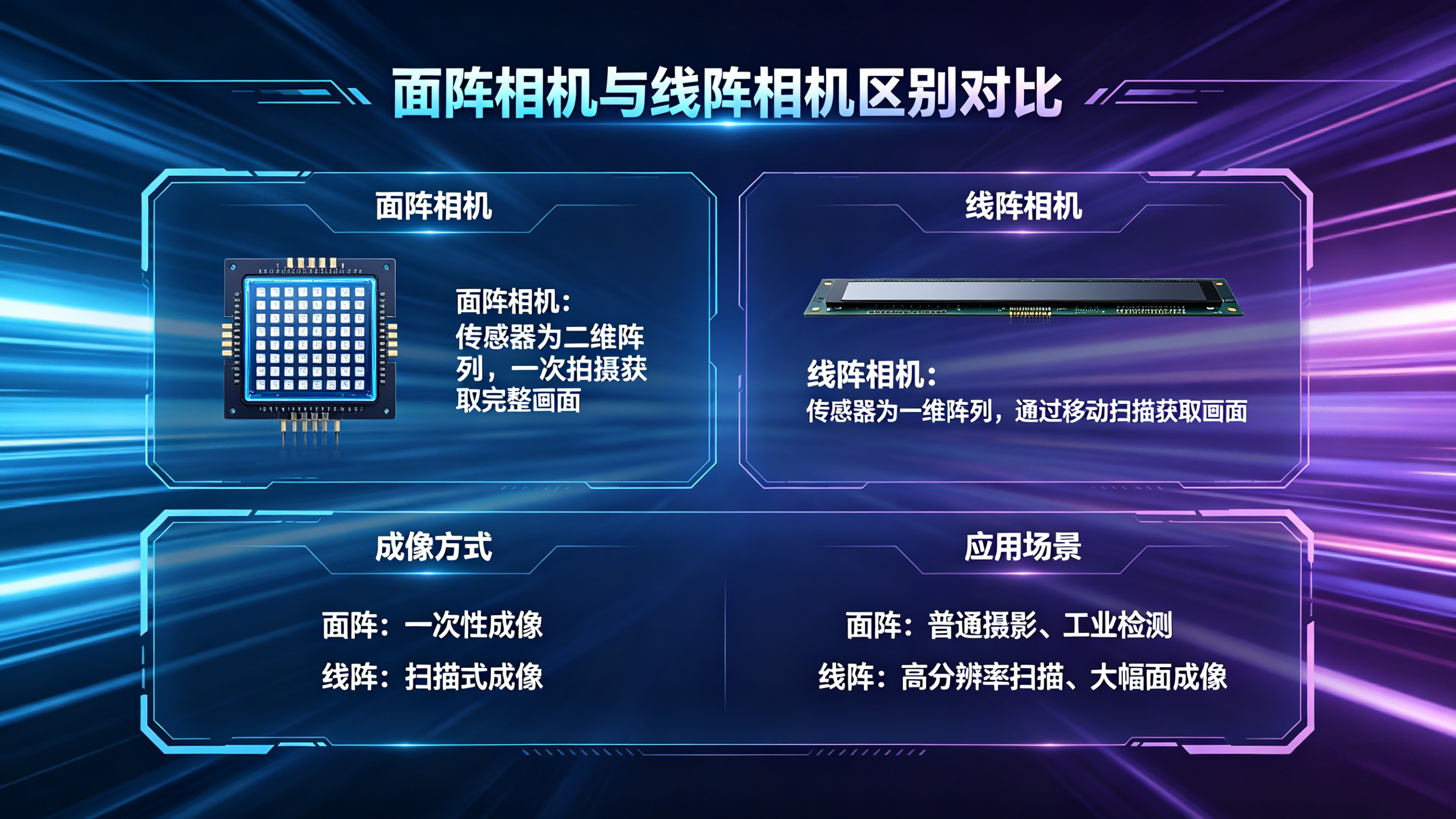
面阵相机 (Area Scan):瞬间的"广角镜"
就像我们平时用的手机摄像头,面阵相机一次曝光捕捉一整张二维图像。
- 代表选手:堡盟 CX/CXG 系列
- 工作方式 :传感器一次性读取所有像素,形成 W i d t h × H e i g h t Width \times Height Width×Height 的矩阵图像。
线阵相机 (Line Scan):连续的"扫描仪"
线阵相机每次曝光只捕捉一行像素 ( N × 1 N \times 1 N×1)。
- 代表选手:大恒 MER/MS系列
- 工作方式 :必须配合物体的高速运动,不断采集"一行",然后在软件中将成千上万行"拼"成一张完整的二维图像。
⚔️ 优缺点深度对比
| 维度 | 面阵相机 (如 堡盟 Baumer) | 线阵相机 (如 大恒 Daheng) |
|---|---|---|
| 成像原理 | 快照式,静态/动态皆可 | 扫描式,必须物体运动 |
| 分辨率 | 常见 2K, 4K (受限于读出速度) | 轻松实现 8K, 16K 甚至 32K 超高分辨率 |
| 帧率/行频 | 受限于全图读出时间 (通常 10-100fps) | 极高 (可达 100kHz 行频),适合高速产线 |
| 数据带宽 | 瞬时爆发高,需大缓存 | 带宽恒定,对传输压力较小 |
| 适用场景 | 电子元件检测、物流分拣、尺寸测量 | 印刷检测、金属/薄膜表面检测、高速飞拍 |
| SDK 特点 | neoAPI 支持 Python,语法极简 | Galaxy SDK 提供 Python 接口,功能丰富 |
💡 选型金句:
- 需要抓拍瞬间 、物体不规则运动 → \rightarrow → 选 面阵(堡盟)。
- 需要极高精度 、物体匀速连续运动 → \rightarrow → 选 线阵(大恒)。
🛠️ Python 实战:代码层面的区别
环境准备
- 面阵库 :
neoapi(需安装 Baumer neoAPI SDK,其自带 Python wheel 包) - 线阵库 :
gxipy(大恒 Galaxy SDK 安装目录下的 Python 包) - 通用库 :
OpenCV(用于显示),NumPy(用于矩阵拼接)
示例 1:堡盟面阵相机 (Baumer) - "抓拍"
面阵相机的逻辑非常简单:初始化 -> 连接 -> 抓一帧 -> 处理。
python
import neoapi
import cv2
import numpy as np
def main_baumer():
try:
# 1. 连接相机 (neoAPI 极其简洁)
cam = neoapi.Cam()
cam.Connect() # 自动连接第一台相机
print("堡盟面阵相机:开始采集...")
# 2. 开启流
cam.f.TriggerMode = neoapi.TriggerMode_Off # 关闭触发,自由运行
cam.StreamStart()
# 3. 获取单帧图像
# GetImage 是阻塞式的
image = cam.GetImage()
# 4. 转换为 OpenCV Mat
# neoAPI 的 Image 可以直接转为 numpy array
img_data = image.GetImageBuffer()
width = image.GetWidth()
height = image.GetHeight()
# 根据位深调整 (这里假设为 8bit)
img_mat = np.frombuffer(img_data, dtype=np.uint8).reshape((height, width))
# 5. 显示与保存
cv2.imshow("Baumer Area Scan", img_mat)
cv2.imwrite("baumer_result.jpg", img_mat)
cv2.waitKey(0)
cam.Disconnect()
except neoapi.NeoException as exc:
print(f"Error: {exc}")
if __name__ == "__main__":
main_baumer()代码解读 :
GetImage()直接返回了一个完整的二维矩阵,无需拼接。这是典型的"所见即所得"。
示例 2:大恒线阵相机 (Line Scan) - "扫描"
线阵相机的逻辑是:开启流 -> 循环采集单行 -> 拼接成图 -> 处理 。
(注:大恒 Galaxy SDK 的 Python 接口基于回调机制)
python
from gxipy import *
import cv2
import numpy as np
import threading
import time
# 全局变量用于拼接图像
g_stitched_mat = None
g_current_row = 0
MAX_HEIGHT = 2000 # 预设扫描高度
g_is_grabbing = False
def capture_thread(cam):
global g_is_grabbing, g_current_row, g_stitched_mat
while g_is_grabbing and g_current_row < MAX_HEIGHT:
# 获取一帧数据 (线阵相机每次 GetImage 通常高度为1)
raw_image = cam.data_stream[0].get_image()
if raw_image is None:
continue
# 检查高度 (线阵通常为1)
if raw_image.get_height() != 1:
continue
# 转为 numpy array
np_image = raw_image.get_numpy_array()
if np_image is None:
continue
# 初始化拼接画布 (第一次获取时)
if g_stitched_mat is None:
width = raw_image.get_width()
# 创建一个 (MAX_HEIGHT, width) 的画布
g_stitched_mat = np.zeros((MAX_HEIGHT, width), dtype=np.uint8)
# 拼接逻辑:将这一行放入大图
if g_current_row < MAX_HEIGHT:
g_stitched_mat[g_current_row, :] = np_image[0, :] # 取第一行数据
g_current_row += 1
print(f"扫描进度: {g_current_row}/{MAX_HEIGHT}", end='\r')
print("\n扫描完成!")
g_is_grabbing = False
def main_daheng():
# 1. 枚举设备
device_manager = gxipy.DeviceManager()
dev_num, dev_info_list = device_manager.update_device_list()
if dev_num == 0:
print("未找到相机")
return
# 2. 打开设备 (默认打开第一台)
cam = device_manager.open_device_by_index(1)
# 3. 配置线阵参数
# 设置为连续采集
cam.AcquisitionMode.set(gxipy.AcquisitionMode.CONTINUOUS)
# 设置行频 (Line Rate)
cam.AcquisitionLineRate.set(10000.0) # 10kHz
# 开启流
cam.stream_on()
cam.AcquisitionStart.send_command()
global g_is_grabbing
g_is_grabbing = True
# 启动采集线程
thread = threading.Thread(target=capture_thread, args=(cam,))
thread.start()
# 运行 5 秒后停止
time.sleep(5)
cam.AcquisitionStop.send_command()
g_is_grabbing = False
thread.join()
# 显示结果
if g_stitched_mat is not None:
cv2.imshow("Daheng Line Scan Result", g_stitched_mat)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 关闭流和设备
cam.stream_off()
cam.close_device()
if __name__ == "__main__":
main_daheng()代码解读:
AcquisitionLineRate:线阵相机的核心参数,必须与传送带速度严格同步。get_image():在 Python 中,我们通常在循环中调用get_image,或者使用回调函数(此处为了演示清晰,使用了独立线程循环)。np_image[0, :]:线阵图像在 NumPy 中的形状通常是(1, Width),我们需要提取第一行。g_stitched_mat:使用 NumPy 的切片操作g_stitched_mat[g_current_row, :]将单行数据写入拼接画布。
⚠️ 踩坑指南与注意事项
1. Python 的 GIL 与性能
Python 由于 GIL(全局解释器锁)的存在,在处理高频线阵数据(如 50kHz+)时,纯 Python 代码可能会丢帧。
解决方案:
- 大恒相机:利用 SDK 内部的缓存队列,Python 线程只负责取图,不要在取图线程中做复杂的图像处理。
- 堡盟相机 :
neoapi的底层是 C++,Python 只是胶水层,性能损耗较小,但仍需注意 NumPy 的内存拷贝效率。
2. 依赖库安装
- 堡盟 :安装较简单,通常使用
pip install neoapi或直接使用安装包提供的 wheel。 - 大恒 :必须先安装 Galaxy SDK,然后在 SDK 安装目录下找到
gxipy文件夹,将其复制到你的 Python 环境中,或者通过setup.py安装。
3. 线阵相机的"黑边"问题
在停止采集时,如果物体还在运动,拼接出来的图像底部可能是黑色的(未采集满)。
解决方案:在代码中维护一个实际有效高度变量,或者在显示前裁剪掉全黑的行。
4. 图像格式转换
- 线阵相机通常输出 Mono8 或 Bayer 格式。
- 在 Python 中使用 OpenCV 显示前,确保数据类型是
np.uint8。如果相机输出是 10bit 或 12bit,需要进行位移转换(如>> 2或// 4)。
✅ 总结
面阵相机(堡盟 neoAPI)是"稳" :Python 接口简洁,几行代码即可出图,适合快速原型开发。
线阵相机(大恒 Galaxy)是"精":配合 Python 的 NumPy 矩阵运算,能高效完成图像拼接,适合高分辨率表面检测。
你的项目,是需要"抓拍"还是"扫描"?