C# 基于OpenCv的视觉工作流-章58-相机标定
本章目标:
一、图像坐标与世界坐标关系;
二、多视几何;
三、为什么要相机标定;
四、相机标定;
一、图像坐标与世界坐标关系
拿着相机,对真实世界拍一张照,照片上某一个像素点坐标与真实世界的坐标关系,如下图所示。
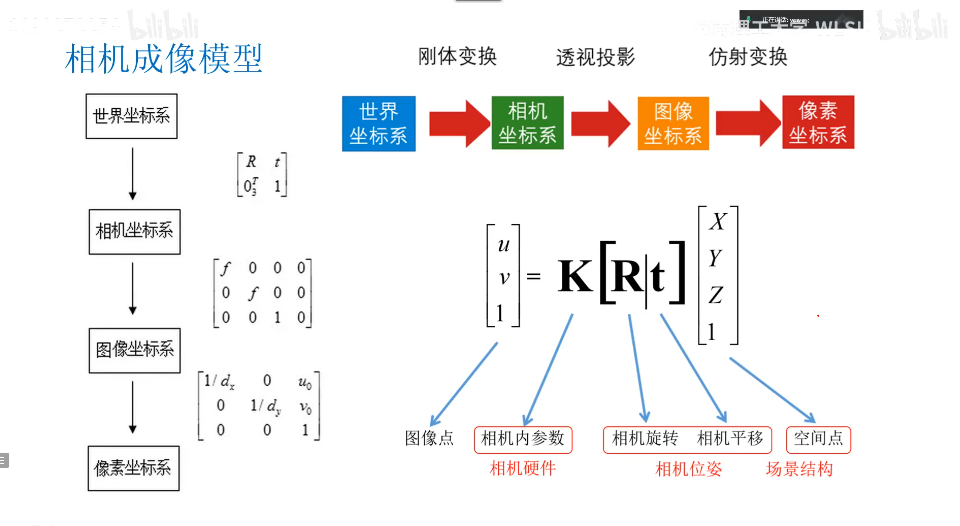
公式中有5个参数,图像坐标(u,v)、相机内参K、相机外参R、相机外参T、世界坐标(X,Y,Z),通过已知的某些参数,可以求得其它参数,如下图。
二、多视几何
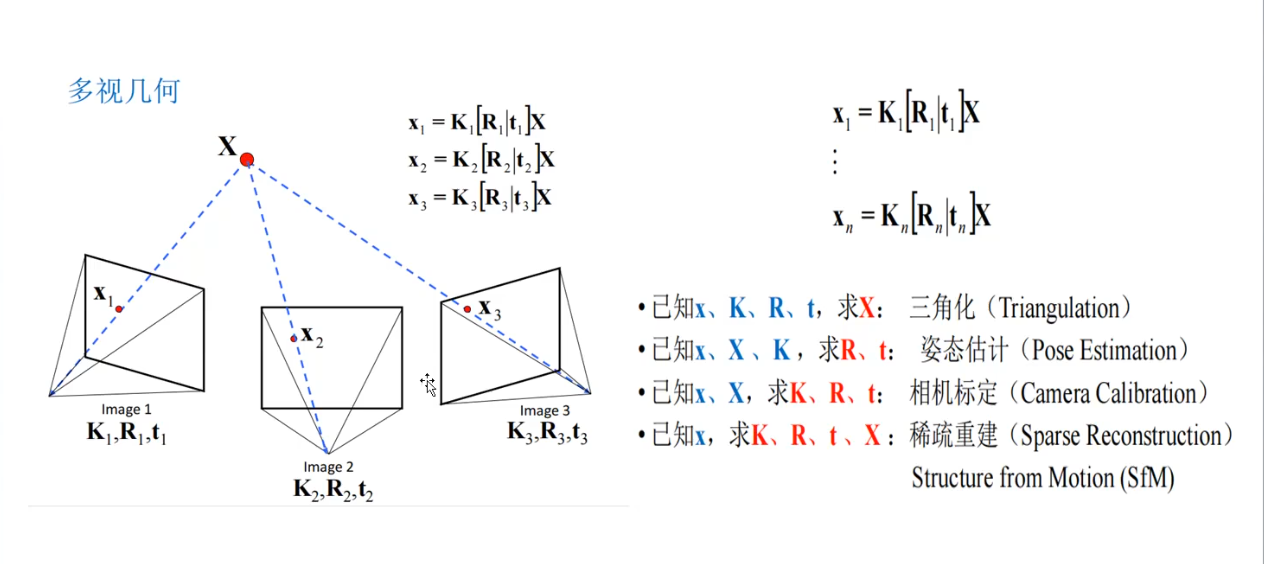
如图,x为图像坐标,X为世界坐标,用相机从多个角度拍同一个点;
1、三角化,根据已知参数x、K、R、t,,可算出该点的世界坐标,多目视觉,无人驾驶等应用;
2、姿态估计,根据已知参数x、X、K,可求出相机是在哪个位置进行拍照;
3、机相标定,根据已知参数x、X,可求出K、R、t值,通过多张图片,实现相机标定;
4、稀疏重建,根据已知参数x,求其它参数,通过几万更多的图像,还原真实世界的3D场景;
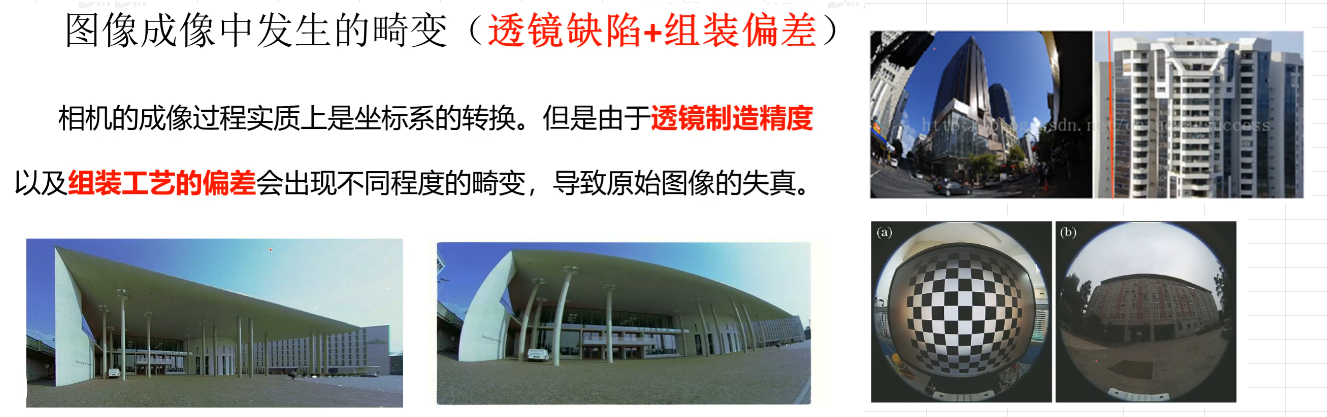
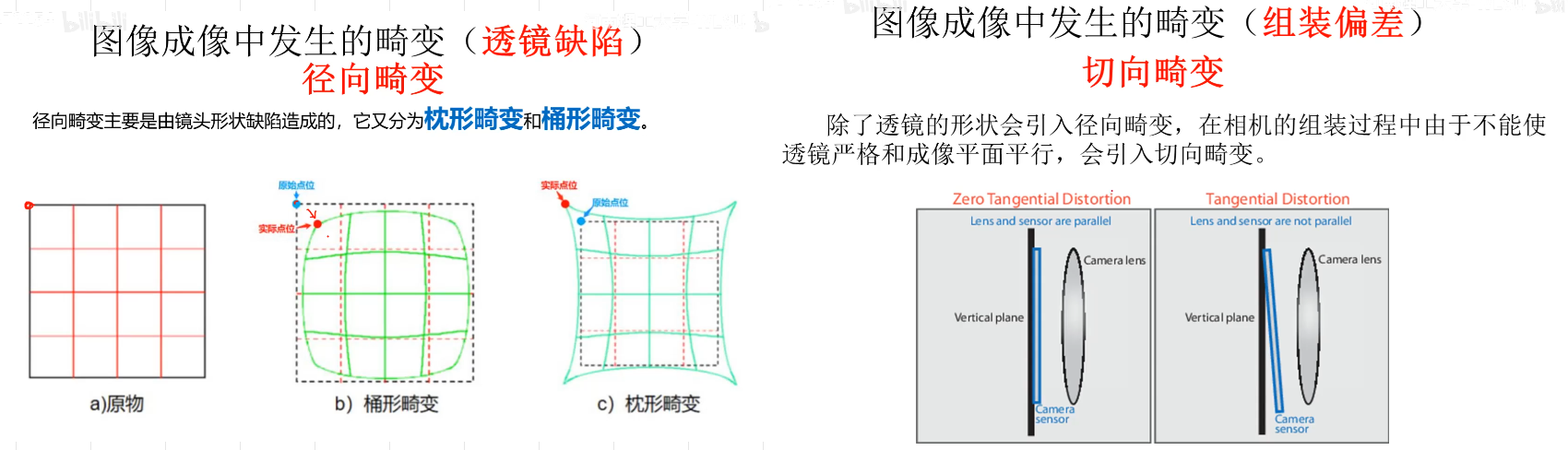
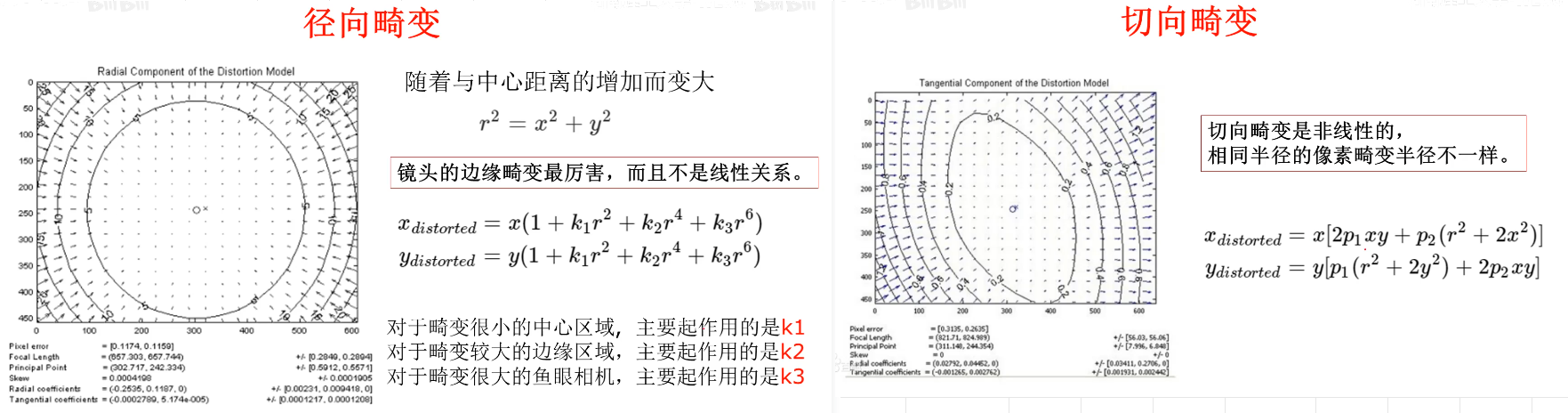
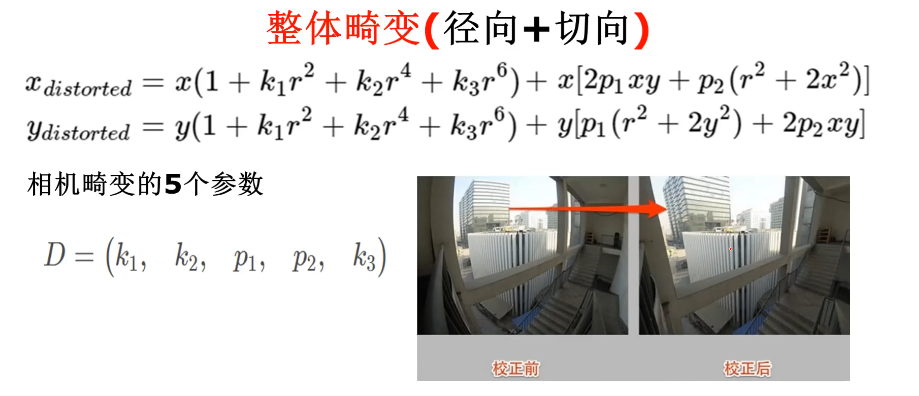
三、为什么要相机标定
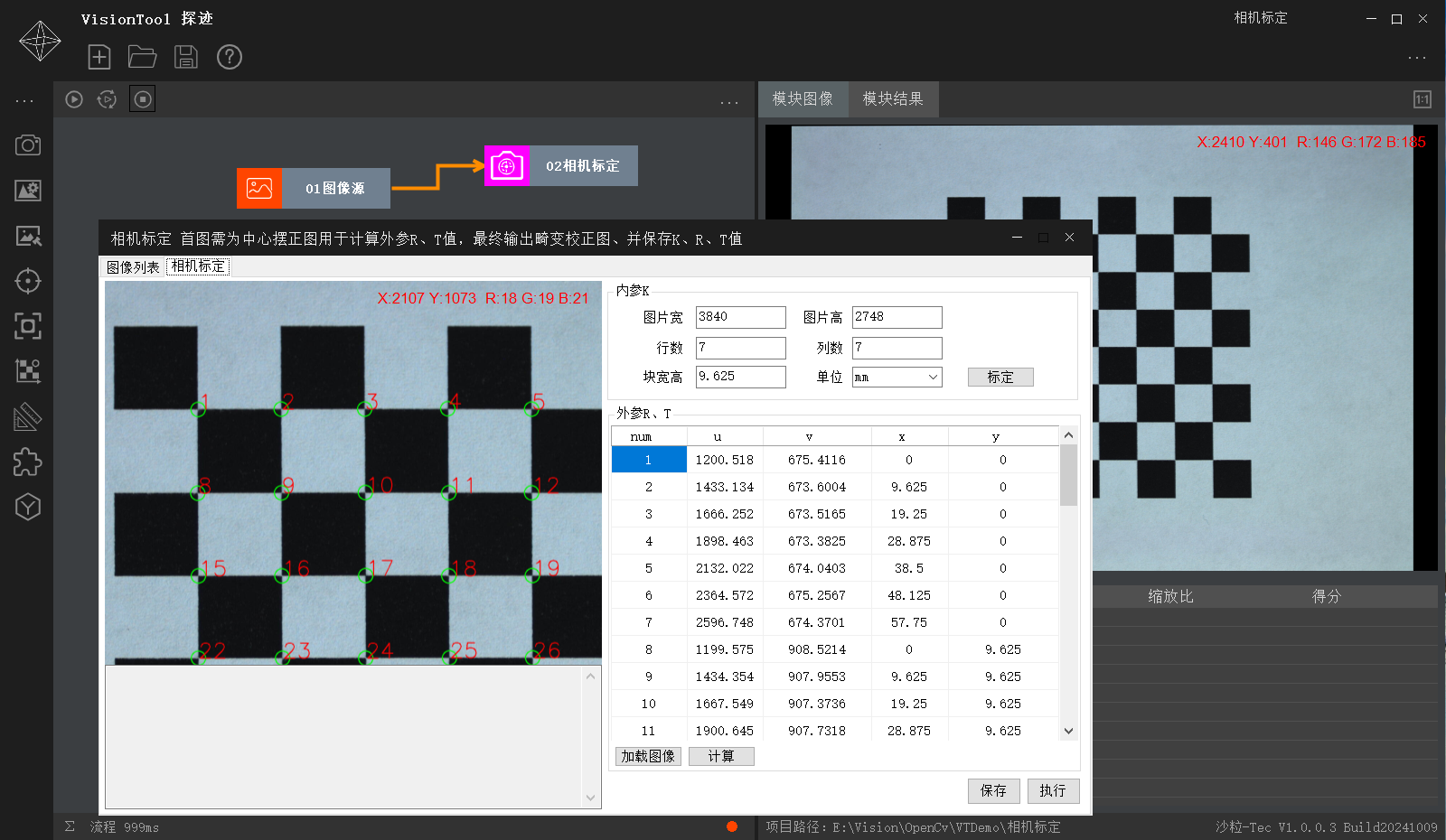
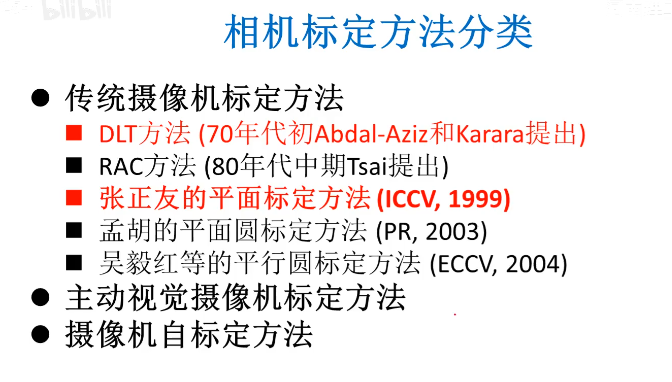
四、相机标定
相机标定除了解决图像变型外,在图像测量中也会使用到,本文以张正友博士的标定方法进行标定。
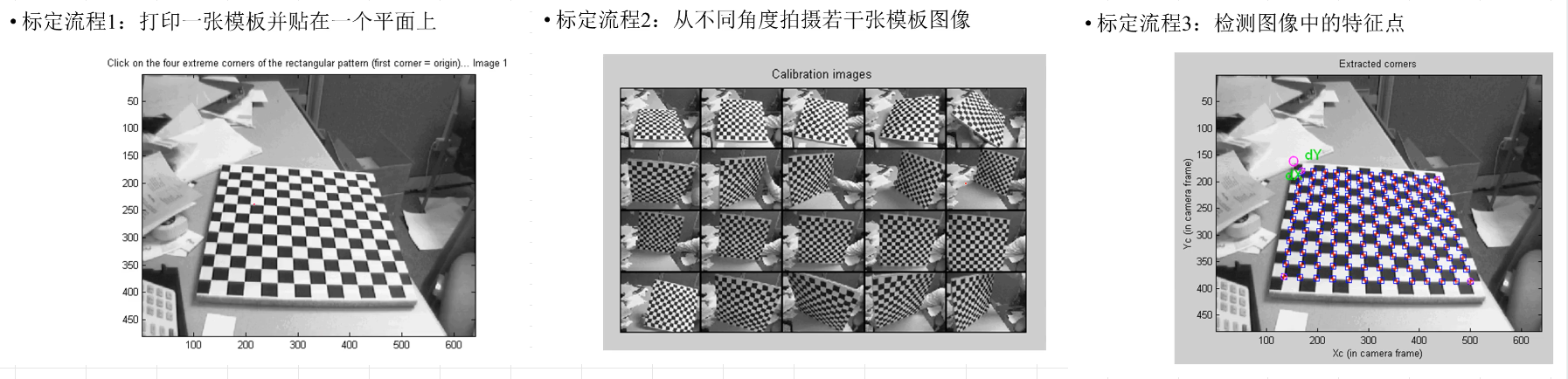
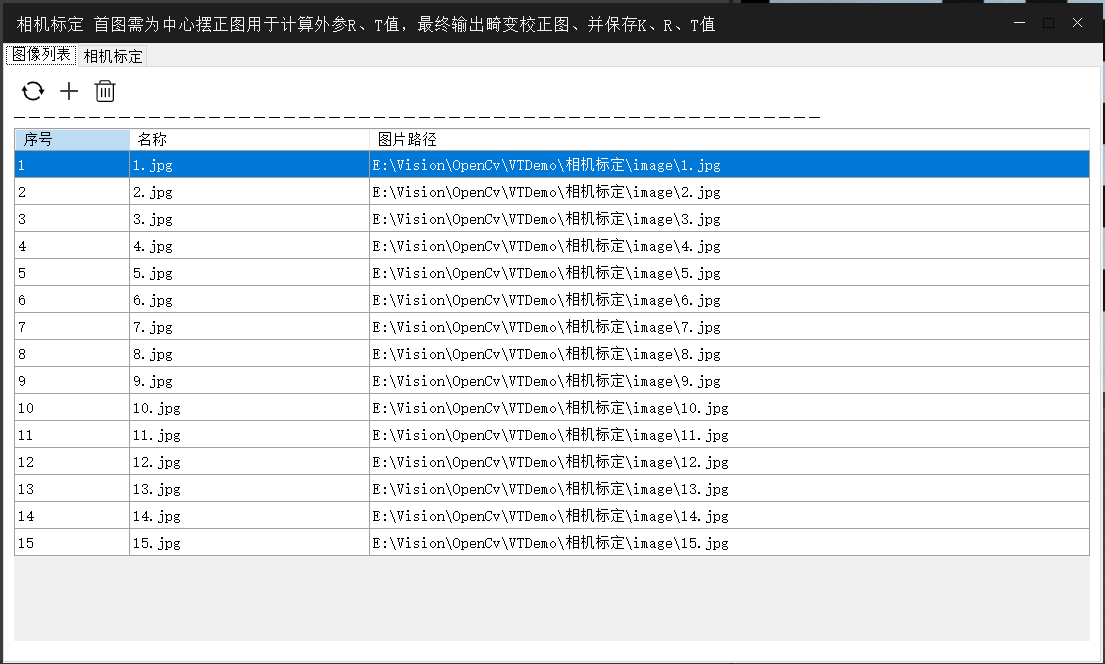
1.加载图像
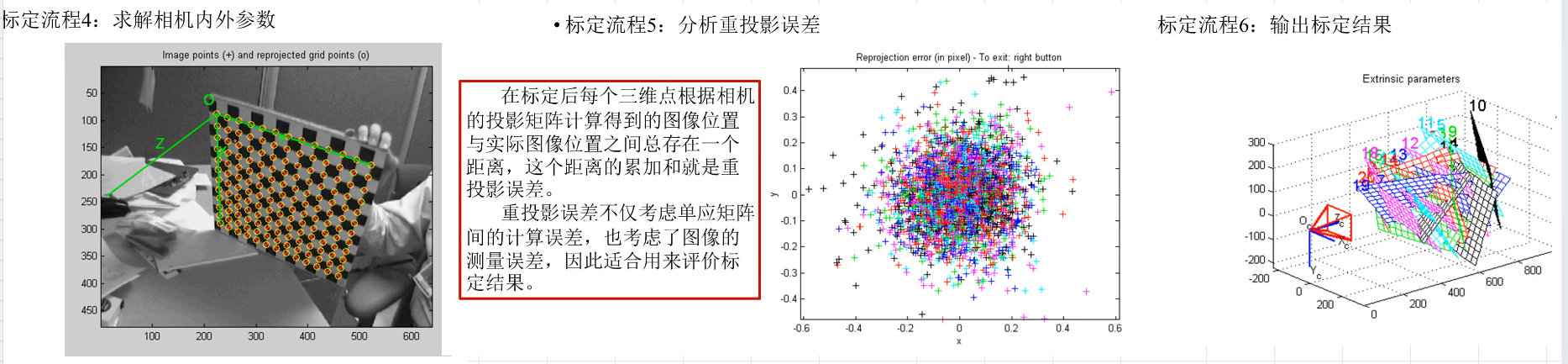
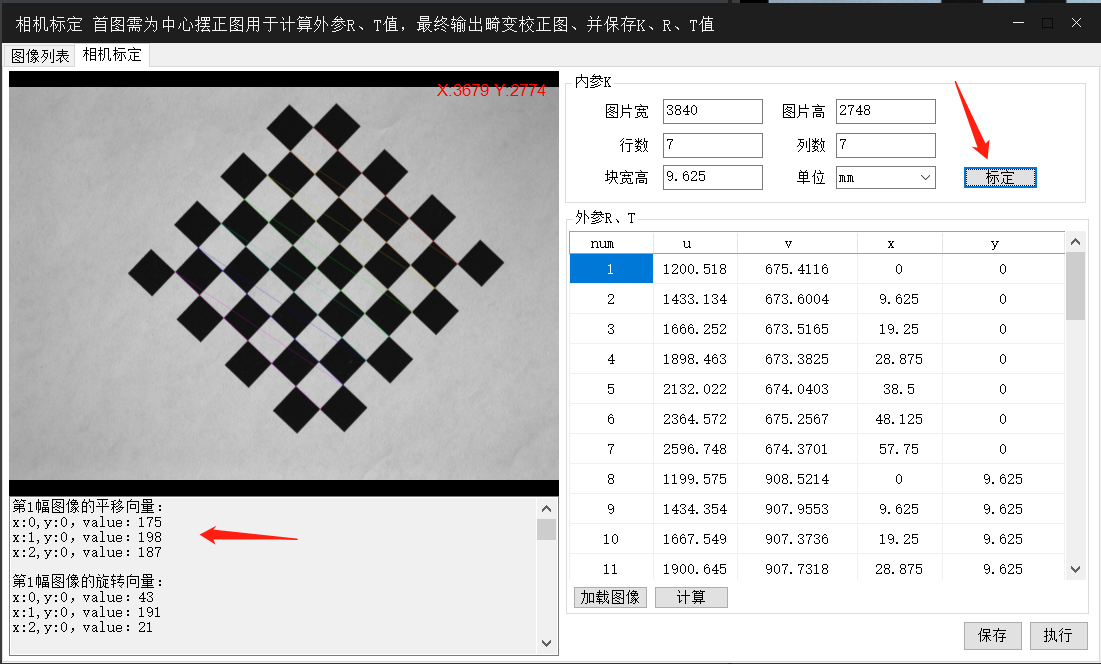
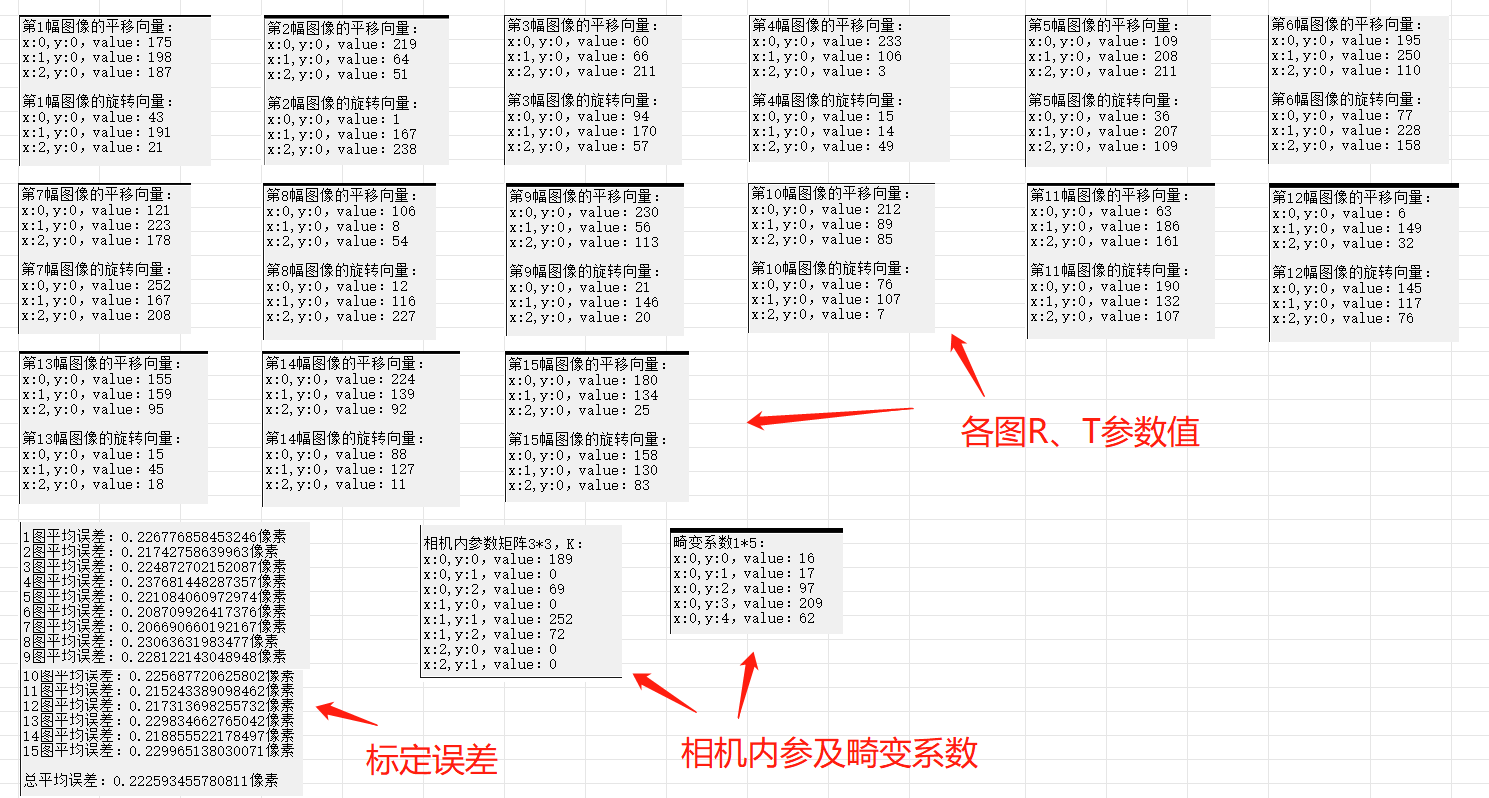
2、标定
对每张图像进行特征点提取,计算内外参数及计算误差,此步会取得相机内参K及畸变系数,用这两个参数就可以进行图像校正了。
3、计算R、T参数
如果要进行图像测量,需要先求出R、T参数,才能根据图像坐标,自动计算出世界坐标。但上一步中每张图像都有各自的R、T参数,要取哪个作为使用参数呢?因为R、T参数就是相机的位姿,即相机摆在哪个位置。以相机固定拍照来测量为例,被测物放在哪里,就取标定板放相同位置时计算的R、T值。
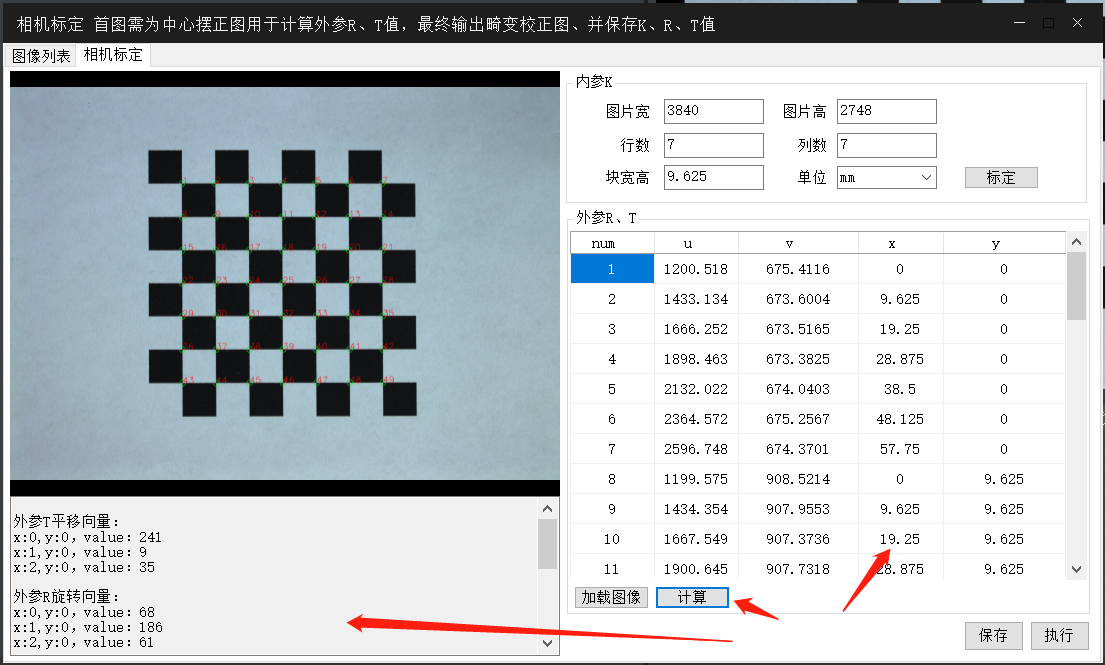
软件中,取摆在相机正下方的标定板来计算R、T值(实际测量时,不要移动相机,将被测物放在相机正下方即可),会自动获取标定板各点的图像坐标,之后人为将各点对应的真实物理坐标值录入,点计算即可计算出K、R、T三个值,最后将三值保存即可。
有了K、R、T三个值,而图像坐标又是可以自动获取得,根据公式,就可以实现自动测量距离了。
参考链接
"VisionTool 探迹"免费视觉工具
下载地址:https://pan.baidu.com/s/11tktKOSnepLNIEqNbvnv6w?pwd=qv5i
"VisionTool Halcon"付费视觉工具 (淘宝可搜)
对应系列文章"C# 基于Halcon的视觉工作流",欢迎前往阅读。
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!