原创代码,请勿翻卖
文章目录
程序简介
概览
针对三维雷达机动目标跟踪问题,构建状态向量 [x, vx, y, vy, z, vz]',其中包含目标在三维空间中的位置和速度信息。目标真实轨迹分为多个运动阶段,包括匀速运动和不同加速度机动过程,用于检验滤波器在目标机动情况下的跟踪能力。
雷达量测模型采用三维球坐标形式,观测量包括距离、方位角和俯仰角。程序首先根据真实轨迹生成带有高斯噪声的量测数据,然后将首帧量测由球坐标转换为直角坐标,作为标准EKF和自适应渐消EKF的初始状态估计。
自适应渐消因子设计(核心算法)
标准 EKF 在模型失配或目标发生机动时,预测协方差可能偏小,导致滤波器对新量测响应不足,从而产生较大的跟踪误差。为增强滤波器对突变运动的适应能力,程序引入自适应渐消因子 λ k \lambda_k λk 对预测协方差进行膨胀。
程序中采用新息实际能量与理论新息协方差能量的比值构造渐消因子。
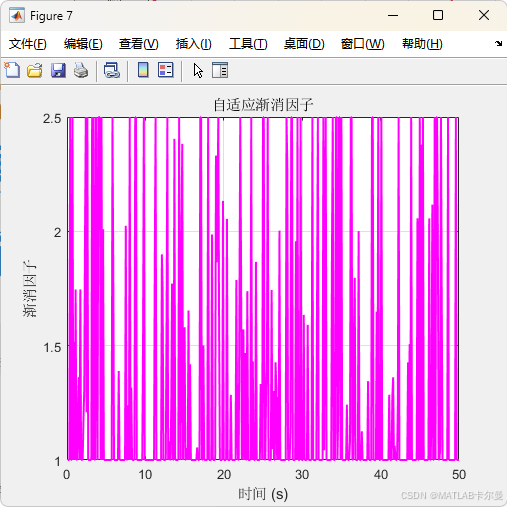
当系统运动平稳、模型预测与量测较一致时, λ k \lambda_k λk 接近 1,AFEKF 退化为常规 EKF;当目标发生明显机动或模型预测误差增大时, λ k \lambda_k λk 增大,从而增强滤波器的自适应跟踪能力。
运行结果
运行 mainAFEKF_3D_Ver1.m 后,程序会完成三维机动目标雷达跟踪仿真,并对比标准EKF与自适应渐消EKF(AFEKF)的跟踪效果。
程序运行后将生成以下图像结果:
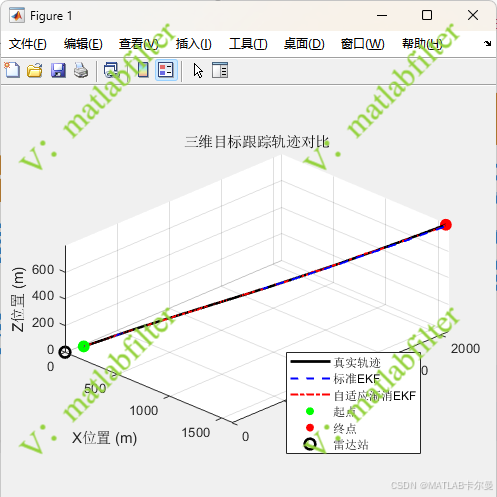
三维真实轨迹、标准EKF估计轨迹和自适应渐消EKF估计轨迹对比图。
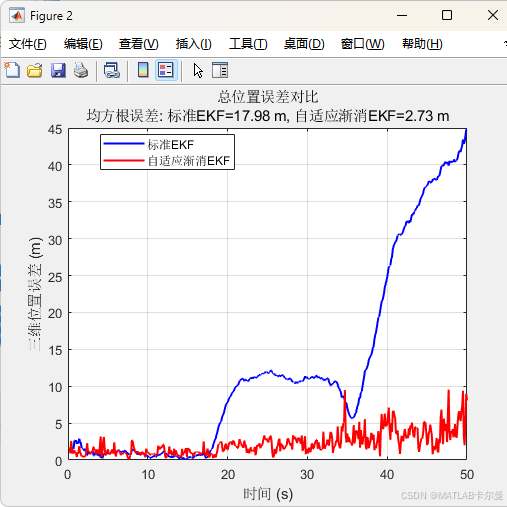
三维总位置误差对比图。
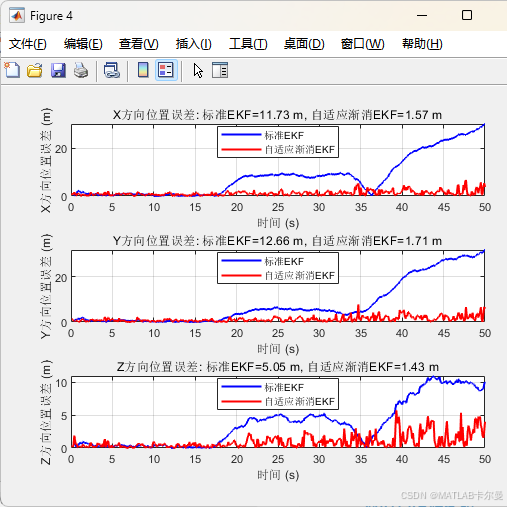
X、Y、Z三个方向的位置误差对比图。
X、Y、Z三个方向的速度估计对比图。
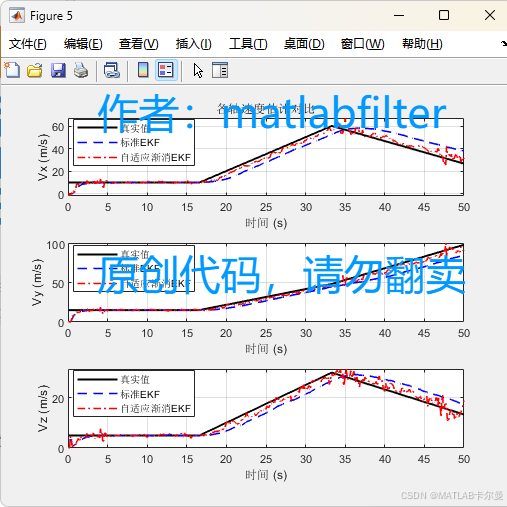
三维速度误差与自适应渐消因子变化曲线:
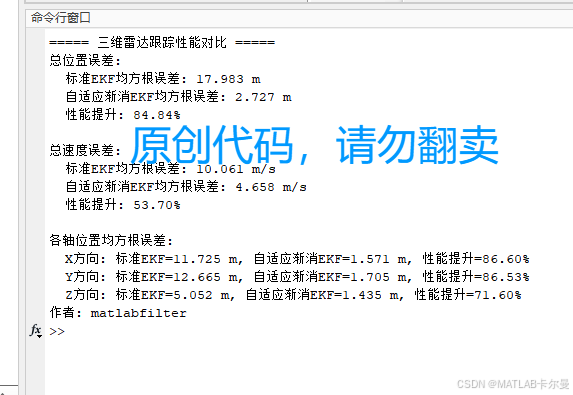
命令行会输出标准EKF和自适应渐消EKF的总位置均方根误差、总速度均方根误差、各轴位置均方根误差以及对应的性能提升百分比:
MATLAB源代码
部分代码(运行界面):
部分代码如下:
matlab
% 自适应渐消扩展卡尔曼滤波(AFEKF)三维雷达目标跟踪
% 状态向量: [x, vx, y, vy, z, vz]'
% 观测向量: [距离, 方位角, 俯仰角]'
% 作者:matlabfilter(V同号,可联系获取例程、定制)
clear; close all; clc;
rng(0);
%% 仿真参数设置
dt = 0.1;
T = 50;
N = T / dt;
time = (1:N) * dt;
%% 真实机动目标轨迹
true_x = zeros(6, N);
true_x(:,1) = [100; 10; 80; 15; 50; 5];
for k = 2:N
if k < N/3
ax = 0; ay = 0; az = 0;
elseif k < 2*N/3
ax = 3; ay = 2; az = 1.5;
else
ax = -2; ay = 3; az = -1;
end
true_x(1,k) = true_x(1,k-1) + true_x(2,k-1)*dt + 0.5*ax*dt^2;
true_x(2,k) = true_x(2,k-1) + ax*dt;
true_x(3,k) = true_x(3,k-1) + true_x(4,k-1)*dt + 0.5*ay*dt^2;
true_x(4,k) = true_x(4,k-1) + ay*dt;
true_x(5,k) = true_x(5,k-1) + true_x(6,k-1)*dt + 0.5*az*dt^2;
true_x(6,k) = true_x(6,k-1) + az*dt;
end
%% 量测噪声设置
sigma_r = 2;
sigma_az = 0.2 * pi / 180;
sigma_el = 0.15 * pi / 180;完整代码:
https://download.csdn.net/download/callmeup/92950818
扩展方向
结合该代码的 AFEKF、三维雷达量测、机动目标跟踪、自适应渐消因子、非线性滤波 等特点,可以向以下前沿方向扩展;这些方向与近年的自适应 Kalman 滤波、机动目标跟踪、IMM、鲁棒滤波和学习辅助滤波研究较接近。
- 面向机动目标跟踪的自适应渐消扩展卡尔曼滤波方法研究
- 基于新息协方差匹配的三维雷达目标自适应跟踪算法研究
- 强跟踪扩展卡尔曼滤波在三维雷达机动目标跟踪中的应用研究
- 面向模型失配的自适应渐消因子设计与滤波稳定性分析
- 基于变噪声估计的自适应 EKF 三维目标跟踪方法研究
- 非高斯噪声环境下的鲁棒自适应雷达目标跟踪算法研究
- 杂波干扰环境下的鲁棒 AFEKF 雷达目标跟踪方法研究
如需帮助,或有导航、定位滤波相关的代码定制需求,可从个人主页左侧联系我