本文目录
- [一、Arbotix 简介](#一、Arbotix 简介)
- 二、安装Arbotix
- 三、配置Arbotix控制器
- 四、配置launch启动文件
- 五、数据交互接口
- 六、在rviz中仿真控制机器人
-
- [6.1 直接发topic控制](#6.1 直接发topic控制)
- [6.2 使用键盘控制](#6.2 使用键盘控制)
- [6.3 编写代码控制机器人移动](#6.3 编写代码控制机器人移动)
前面讲了机器人的建模,是静态的,接下来介绍对机器人的仿真控制,让你的机器人动起来。
一、Arbotix 简介
Arbotix 是一款控制电机、舵机的硬件控制板,并提供相应的 ros 功能包,是一款基于 ROS的机器人控制系统,它旨在为小型机器人提供硬件控制和传感器接口,以便于机器人的运动和感知。它不仅可以驱动真实的 arbotix 控制板,还提供一个差速控制器,通过接收速度控制指令更新机器人的 joint 状态,从而帮助我们实现机器人在仿真环境中的运动。
它的源代码可以在这个里得到:https://github.com/vanadiumlabs/arbotix_ros
arbotix_ros 源码包含如下几部分:
其中,
arbotix_controllers:控制器,现已合并到arbotix_python中。arbotix_firmware:处理与 ArbotiX-ROS 绑定通信的固件源代码。arbotix_msgs:ArbotiX 的消息和服务定义。arbotix_python:驱动程序、用于与驱动程序交互的 GUI 以及用于设置伺服电器的终端工具。arbotix_sensors:包含几个传感器模块,可在 arbotix_python 的基本结构上添加额外的 ROS 接口层。
我们主要使用 arbotix_python 的驱动程序模块 arbotix_driver 中的差速底盘控制器 diff_controller。
更多关于 Arbotix 的信息见 https://wiki.ros.org/arbotix
关于 diff_controller 的信息见 http://wiki.ros.org/arbotix_python/diff_controller
二、安装Arbotix
对于 ROS1 ,有两种安装方法,命令行和源码安装。
-
命令行安装
bashsudo apt install ros-<<VersionName()>>-arbotix* -
源码安装
首先在你的工作空间的
src目录下下载源代码:bashgit clone https://github.com/vanadiumlabs/arbotix_ros.git然后编译即可使用
Arbotixcatkin_make # 编译
三、配置Arbotix控制器
Arbotix 针对不同的机器人,需要配置不同的控制器,配置文件为 yaml 格式,如下:
yaml
# 该文件是控制器配置,一个机器人模型可能有多个控制器,比如: 底盘、机械臂、夹持器(机械手)....
# 因此,根 name 是 controllers
controllers: {
# 单控制器设置
base_controller: {
# 类型: 差速控制器
type: diff_controller,
# 参考坐标
base_frame_id: base_link,
# 两个轮子之间的间距,单位:m
base_width: 0.38,
# 机器人每移动一米,电机编码器所记录的脉冲数
ticks_meter: 2000,
# PID控制参数,使机器人车轮快速达到预期速度
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
# 加速度限制
accel_limit: 1.0
}
}四、配置launch启动文件
启动时 Arbotix 会作为一个节点加入到 ROS Master 中,我们使用 launch 文件配置快速启动。
xml
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find simulation_learning)/config/mbot_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node>其中,节点名注册为 arbotix,包名为 arbotix_python,节点可执行文件名为 arbotix_driver;rosparam 一行是载入上文的 Arbotix 配置文件;Arbotix 不仅可以用于真实控制板,也可以用于仿真环境,如用于仿真,需将参数 sim 设置为 true。
五、数据交互接口
该节点订阅一个话题:/cmd_vel,用于接收对机器人的速度控制信息
消息格式为:geometry_msgs/Twist
xml
geometry_msgs/Vector3 linear # 机器人三轴线速度
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular # 机器人三轴角速度
float64 x
float64 y
float64 z发布一个话题:/odom,用于发布机器人里程计信息,包括定位与速度等信息
消息格式为:nav_msgs/Odometry
xml
std_msgs/Header header
uint32 seq # 消息序列号
time stamp # 时间戳
string frame_id # 消息帧id
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/Pose pose
geometry_msgs/Point position # 机器人位置坐标
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation # 机器人方向的四元数表示
float64 x
float64 y
float64 z
float64 w
float64[36] covariance # 6x6协方差矩阵的行主表示
geometry_msgs/TwistWithCovariance twist
geometry_msgs/Twist twist
geometry_msgs/Vector3 linear # 机器人三轴线速度
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular # 机器人三轴角速度
float64 x
float64 y
float64 z
float64[36] covariance # 6x6协方差矩阵的行主表示其中6x6协方差矩阵,用于量化位姿估计不确定性。这个矩阵对角线上的元素分别代表了位置与方向估计值的方差,而矩阵的非对角线元素则表示了位置与方向各估计值之间的协方差。矩阵各向量依次表示 (x,y,z,绕x轴旋转,绕y轴旋转,围绕z轴旋转)的估计不确定性。
有了这两个话题,我们就可以控制并获取机器人的位姿了。
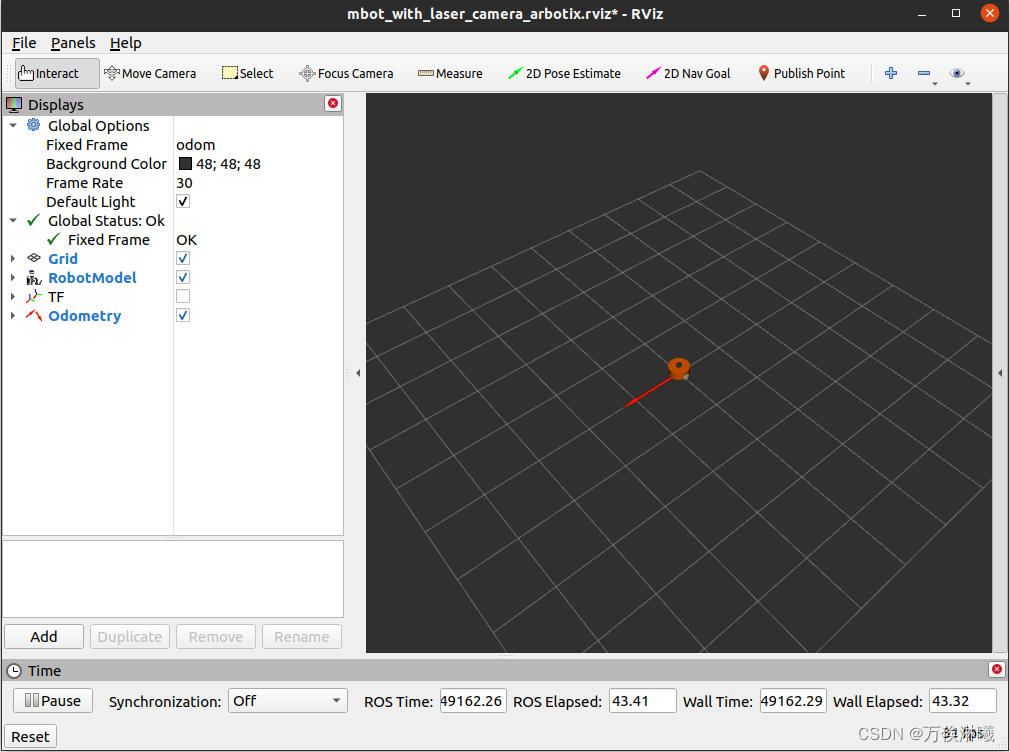
六、在rviz中仿真控制机器人
使用前文 URDF建模实践 创建的机器人模型,在 launch 文件中添加 Arbotix 节点的启动配置,启动后如下图:
6.1 直接发topic控制
发布 /cmd_vel 话题控制机器人移动,并订阅 /odom 显示机器人的实时位置与速度信息:
6.2 使用键盘控制
运行ROS提供的键盘控制包,控制机器人移动:
6.3 编写代码控制机器人移动
写两个节点,一个发布速度,一个订阅里程计,如下:
move.cpp 用于发布速度:
cpp
#include "ros/ros.h"
#include "geometry_msgs/Twist.h"
geometry_msgs::Twist moveRobot(const double& linear, const double& angular)
{
geometry_msgs::Twist msg;
msg.linear.x = linear;
msg.linear.y = 0.0;
msg.linear.z = 0.0;
msg.angular.x = 0.0;
msg.angular.y = 0.0;
msg.angular.z = angular;
ROS_INFO("moveRobot, linear: %.3lf, angular: %.1lf", linear, angular*180/M_PI);
return msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "move_robot");
ros::NodeHandle nh;
ros::Publisher velPub = nh.advertise<geometry_msgs::Twist>("/cmd_vel", 10);
ros::Rate r(1);
while (ros::ok())
{
velPub.publish(moveRobot(0.5, -0.3));
ros::Duration(3.0).sleep();
velPub.publish(moveRobot(-0.5, -0.3));
ros::Duration(3.0).sleep();
r.sleep();
}
return 0;
}odom.cpp 用于订阅里程计:
cpp
#include "ros/ros.h"
#include "nav_msgs/Odometry.h"
void odomCallback(const nav_msgs::Odometry::ConstPtr& msg)
{
geometry_msgs::Quaternion q = msg->pose.pose.orientation;
ROS_INFO("pose: [%.2lf, %.2lf, %.1lf], linear: %.2lf, angular: %.2lf",
msg->pose.pose.position.x, msg->pose.pose.position.y,
std::atan2(2.0 * (q.w * q.z + q.x * q.y), 1.0 - 2.0 * (q.y * q.y + q.z * q.z))*180/M_PI,
msg->twist.twist.linear.x, msg->twist.twist.angular.z*180/M_PI);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "robot_odom");
ros::NodeHandle nh;
ros::Subscriber odomSub = nh.subscribe<nav_msgs::Odometry>("/odom", 10, odomCallback);
ros::spin();
return 0;
}CMakeList.txt 中添加内容:
clike
add_executable(move_robot_node src/move.cpp)
add_executable(robot_odom_node src/odom.cpp)
target_link_libraries(move_robot_node
${catkin_LIBRARIES}
)
target_link_libraries(robot_odom_node
${catkin_LIBRARIES}
)启动 rviz 后,运行 move_robot_node 和 robot_odom_node ,如下: