Forecasting from LiDAR via Future Object Detection
基础信息
- 论文:cvpr2022
- paper https://openaccess.thecvf.com/content/CVPR2022/papers/Peri_Forecasting_From_LiDAR_via_Future_Object_Detection_CVPR_2022_paper.pdf
- github:https://github.com/neeharperi/FutureDet?tab=readme-ov-file
- 单位:Carnegie Mellon University,RWTH Aachen University,TUM Munich,Argo AI
摘要
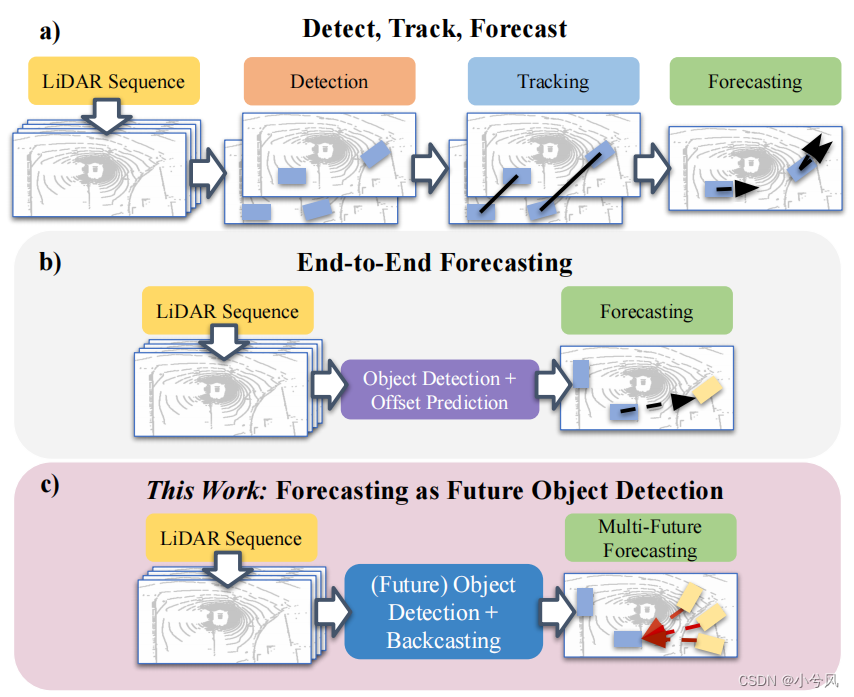
1.目标检测和预测是具身感知的基本组成部分。
-
然而,这两个问题目前都是孤立地进行研究
-
在本文中,我们提出了一种端到端基于点云数据的端到端检测和运动预测方法,而不是根据一些真值。
-
我们不是预测当前的帧位置再向前预测,而是直接预测未来的物体位置和反推每个轨迹的起点
-
与其他模块化或端到端基线相比,我们的方法不仅提高了整体的准确性,而且还促使我们重新思考显式跟踪在具体化感知中的作用。
-
此外,通过以多个方式连接未来和当前位置,我们的方法能够推断多个未来,这是以前被认为是端到端方法困难的能力。
-
我们在流行的nuScenes数据集上进行了广泛的实验,并证明了我们的方法的经验有效性
-
此外,我们还研究了对端到端设置重用标准预测指标的适当性,并发现了一些允许我们构建简单的基线来博弈这些指标的限制。
-
我们通过一套新的联合预测和检测度量来解决这个问题,该度量将常用的AP度量从检测社区扩展到度量预测精度。
-
我们的代码可以在GitHub上找到。