视频讲解
第1季:第9章_视觉SLAM系统
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------
添加图片注释,不超过 140 字(可选)
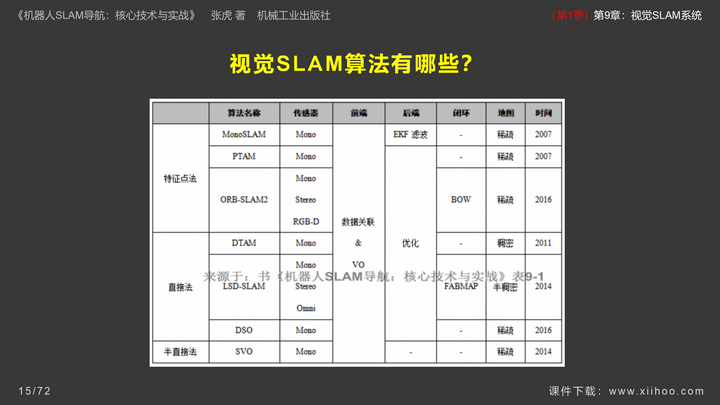
本书内容安排

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
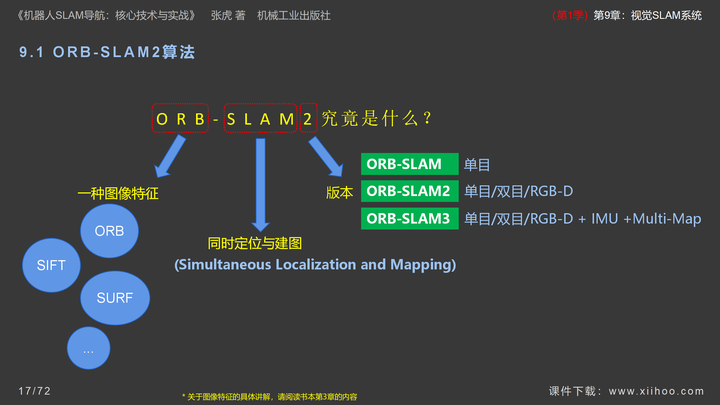
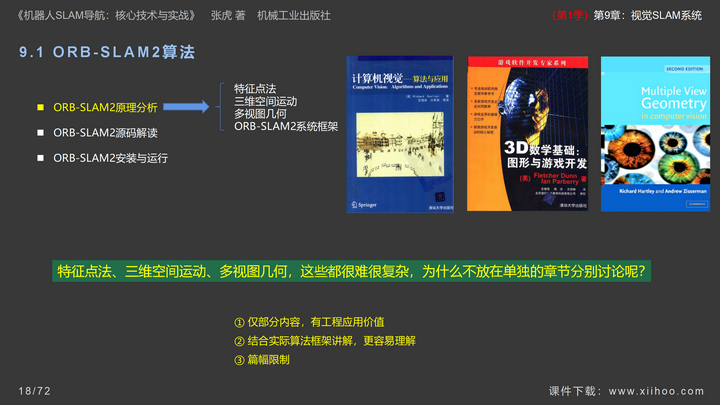
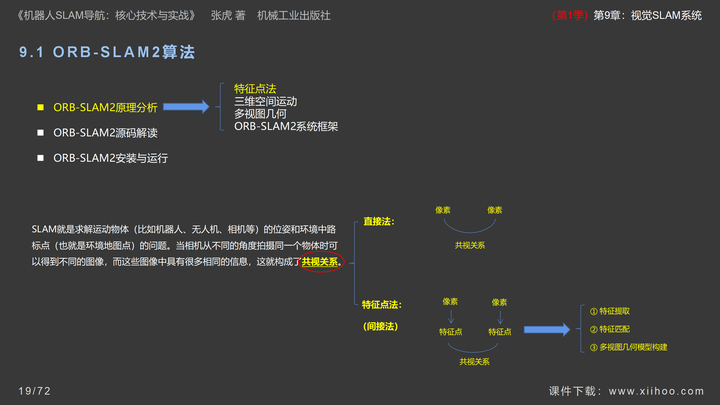
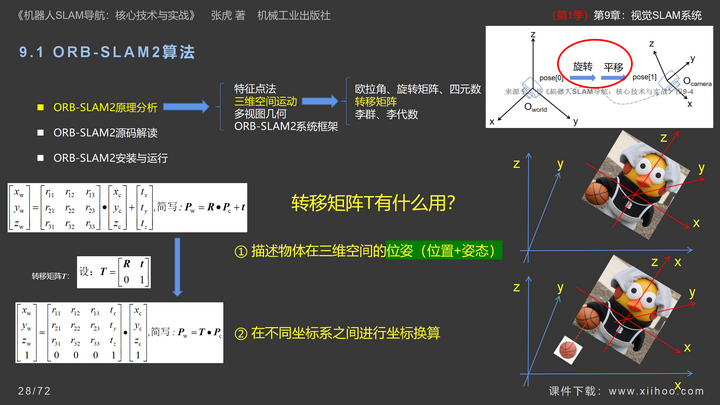
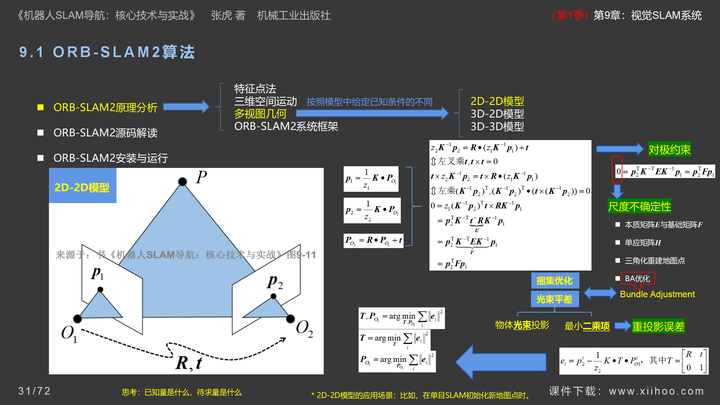
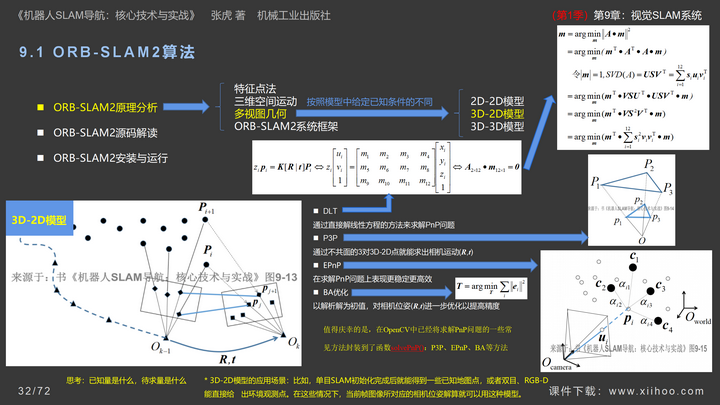
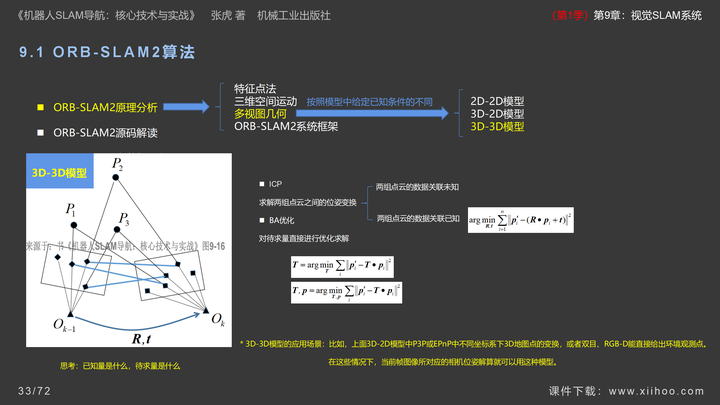
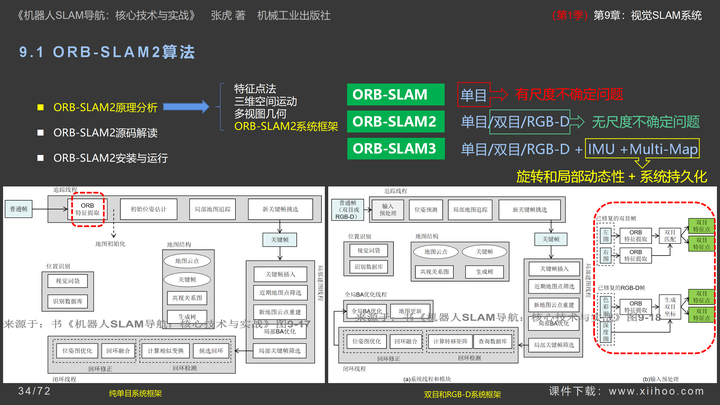
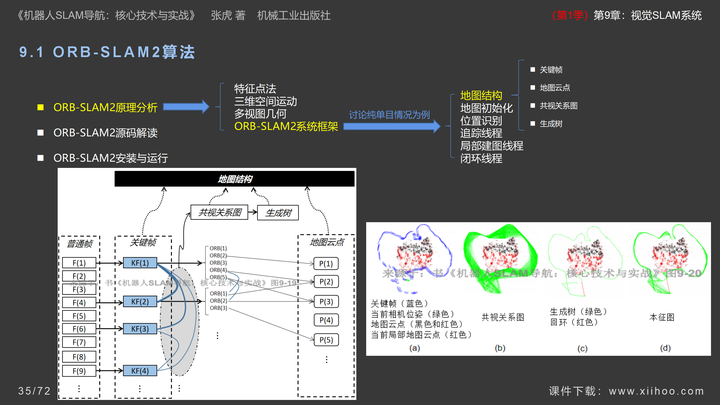
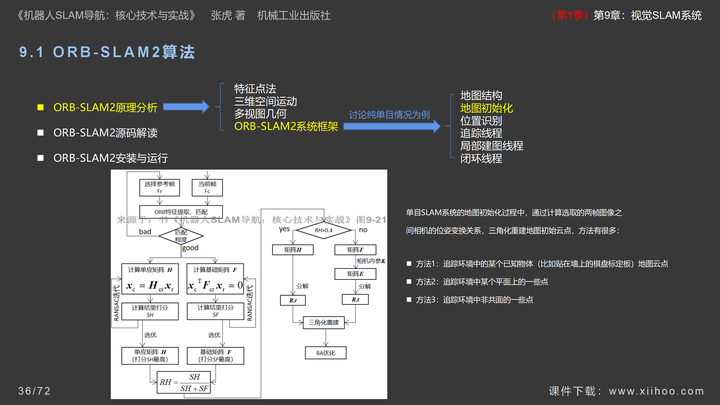
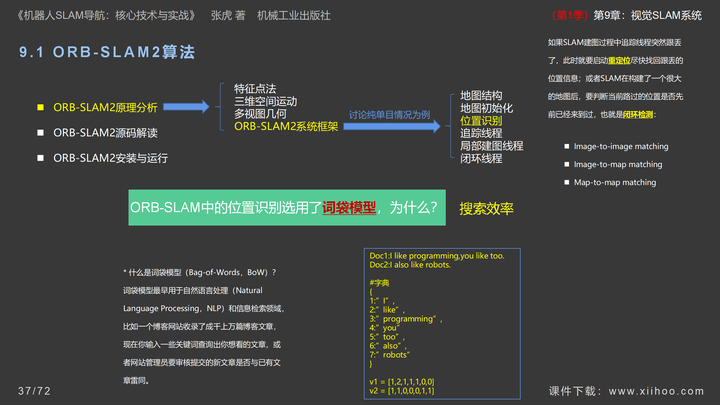
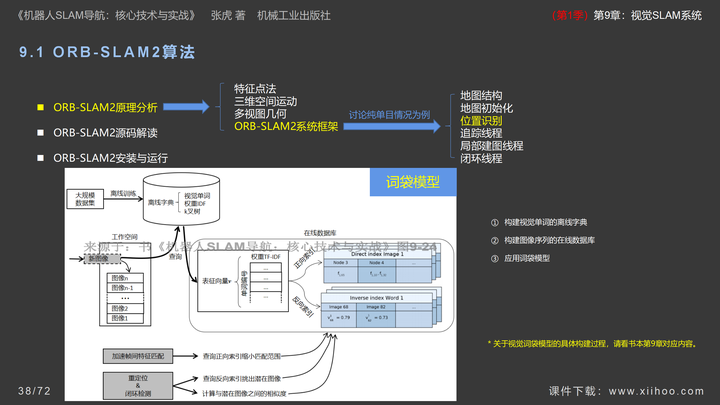
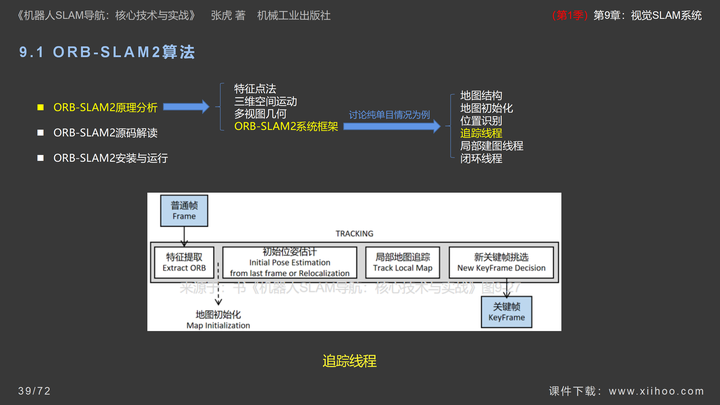
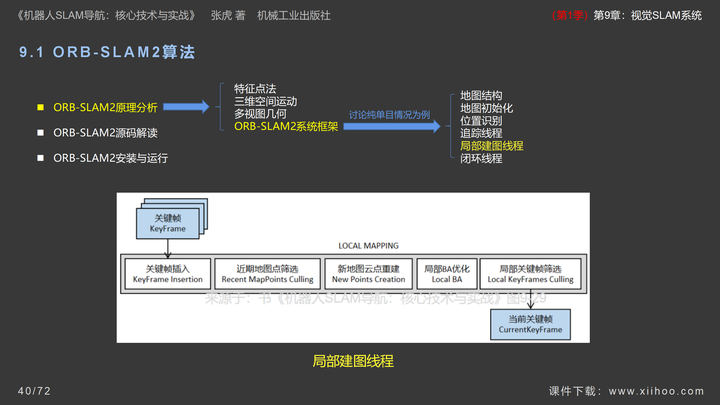
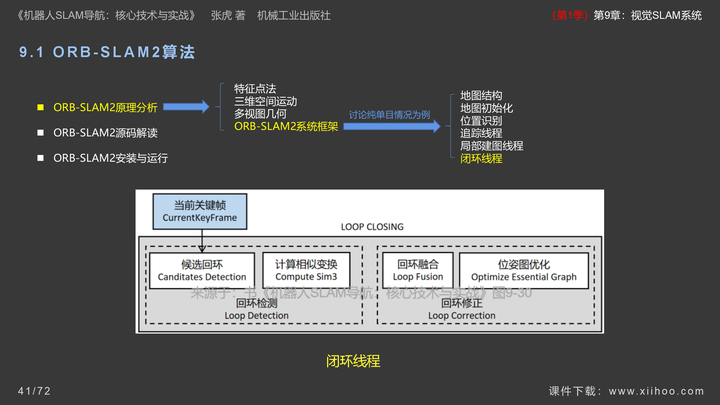
9.1 ORB-SLAM2算法
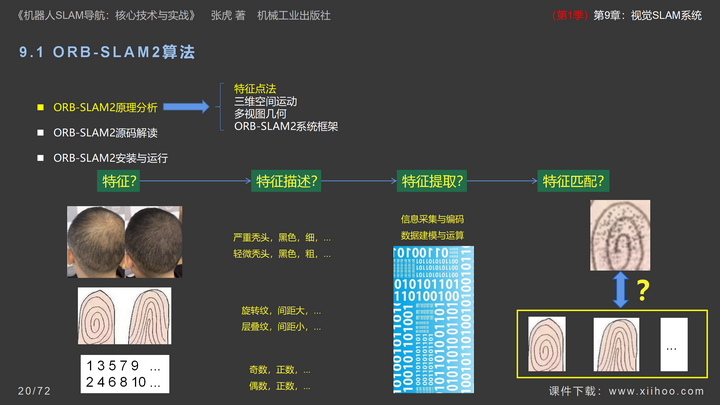
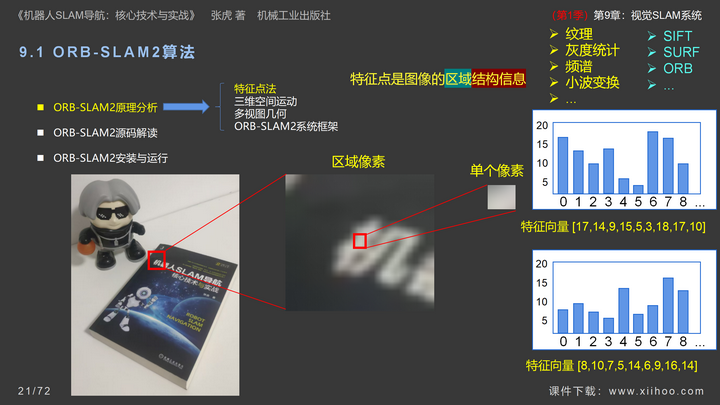
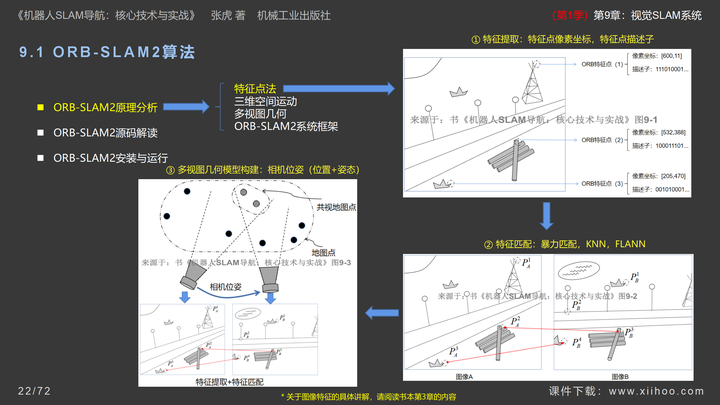
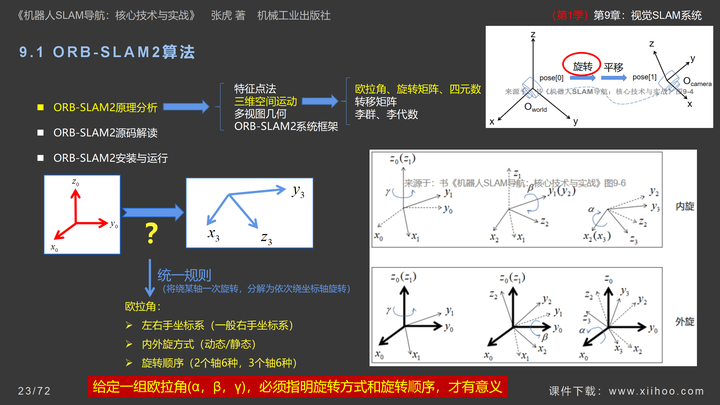
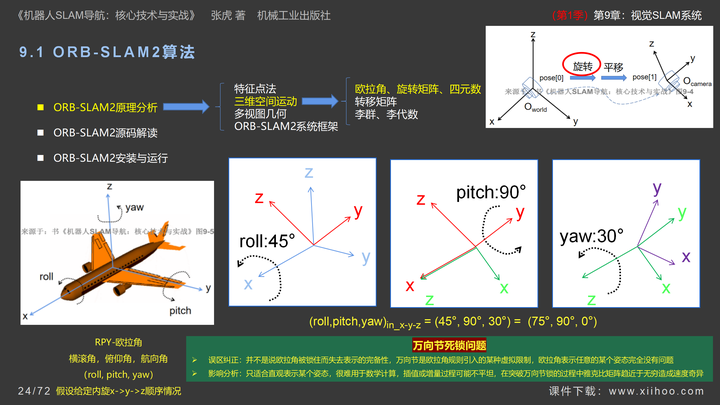
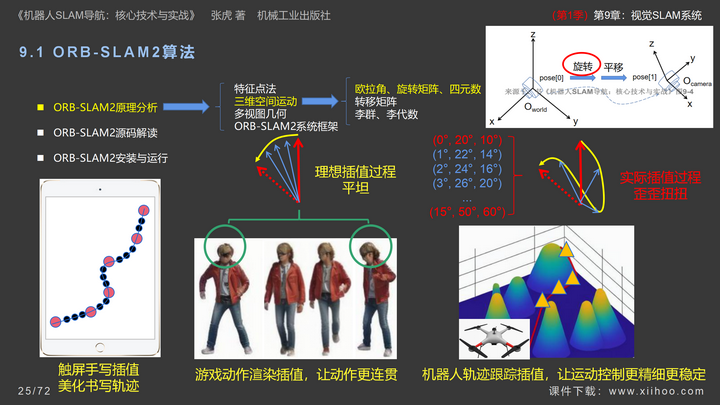
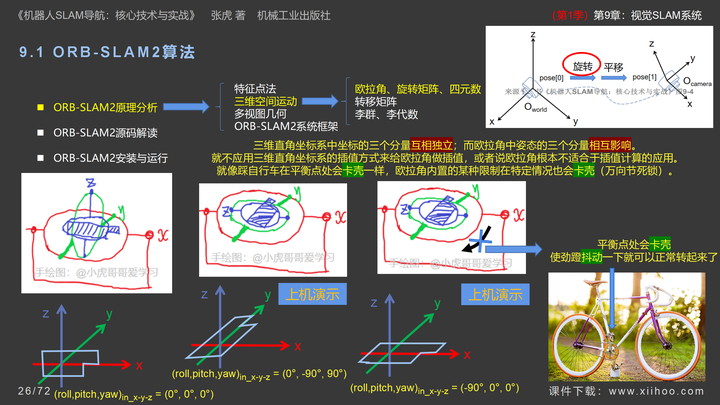
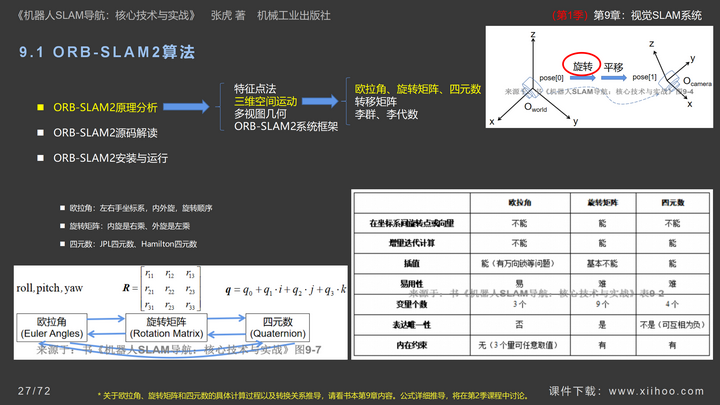
①ORB-SLAM2原理分析
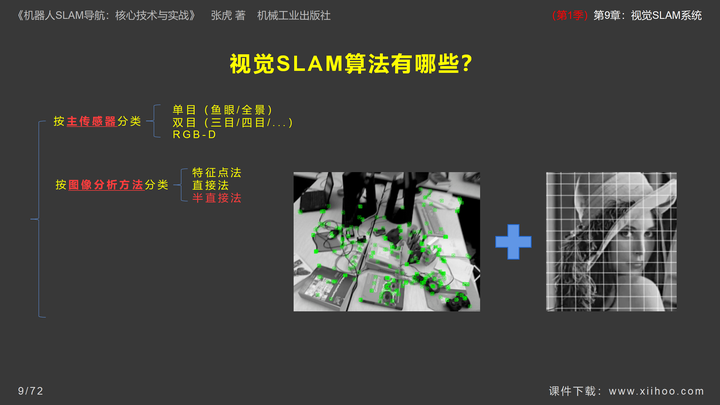
特征点法、三维空间运动、多视图几何、ORB-SLAM2系统框架
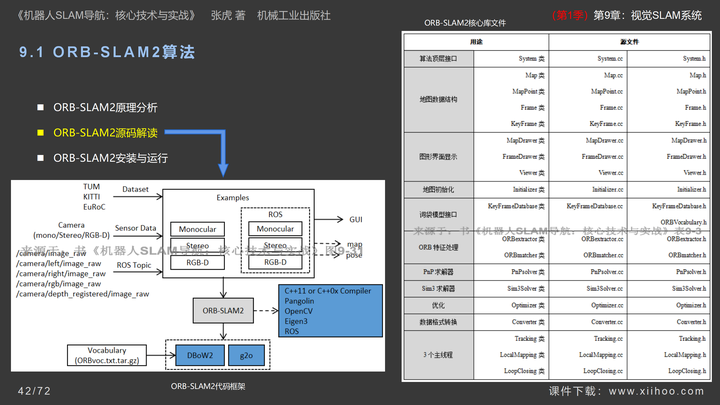
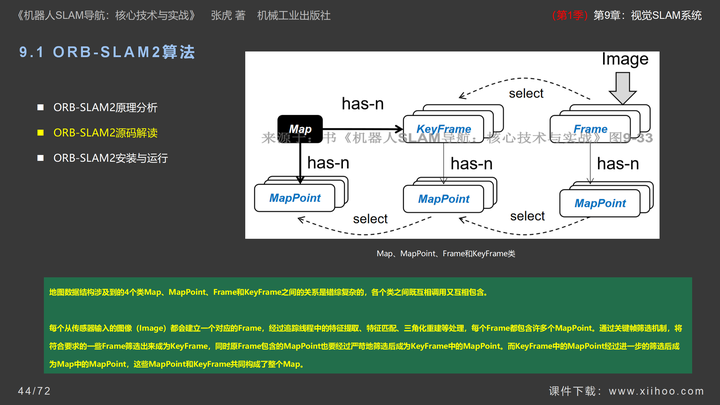
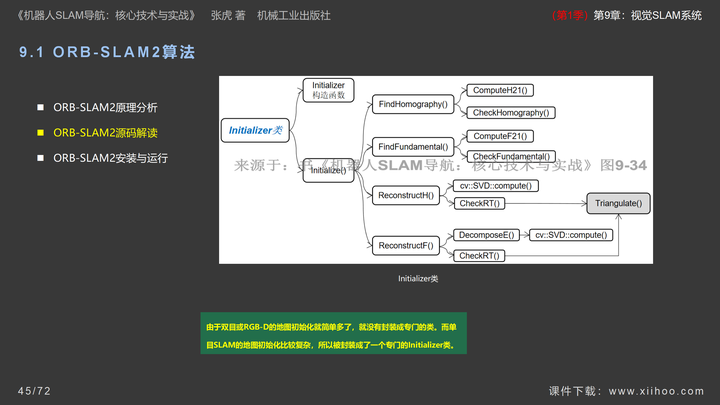
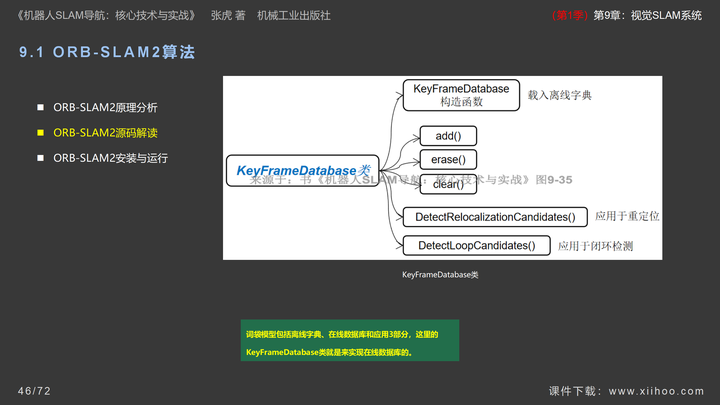
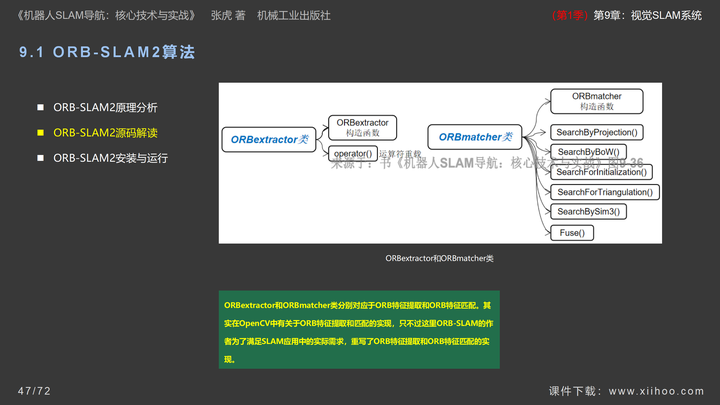
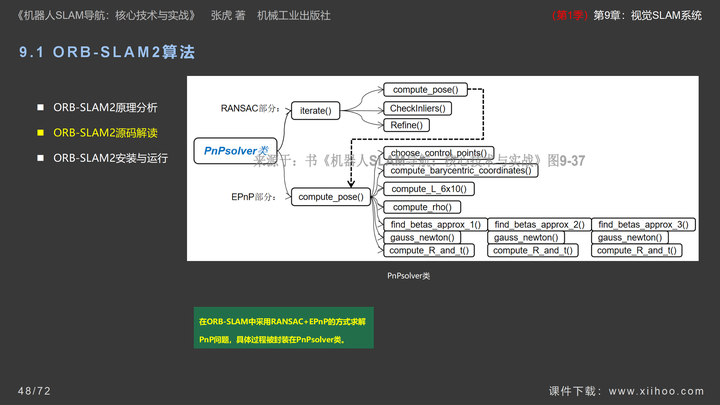
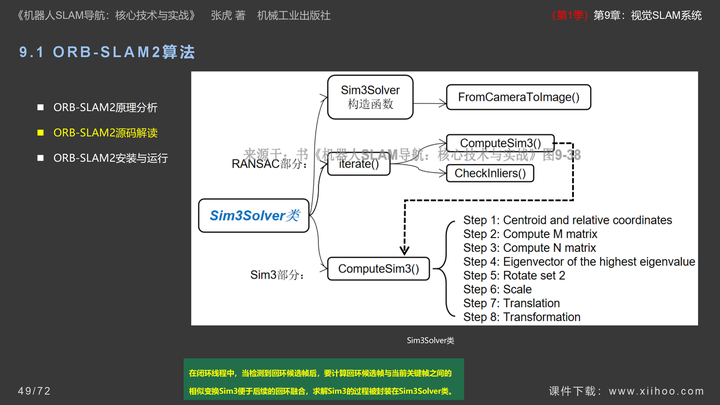
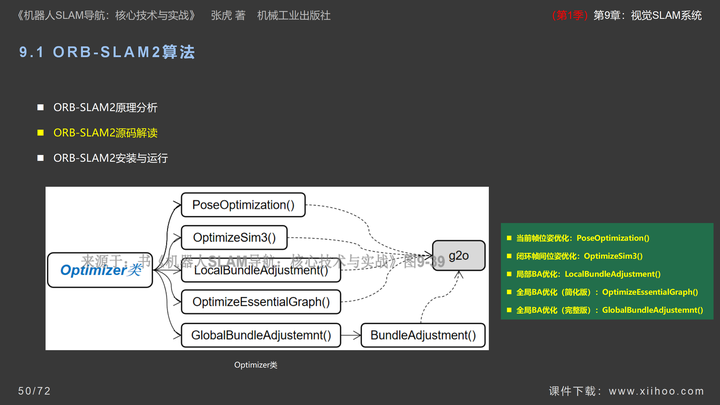
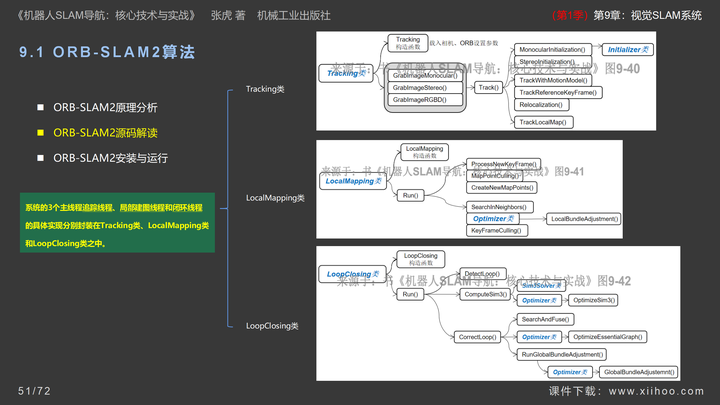
②ORB-SLAM2源码解读
ORB-SLAM2代码框架、ORB-SLAM2核心库文件
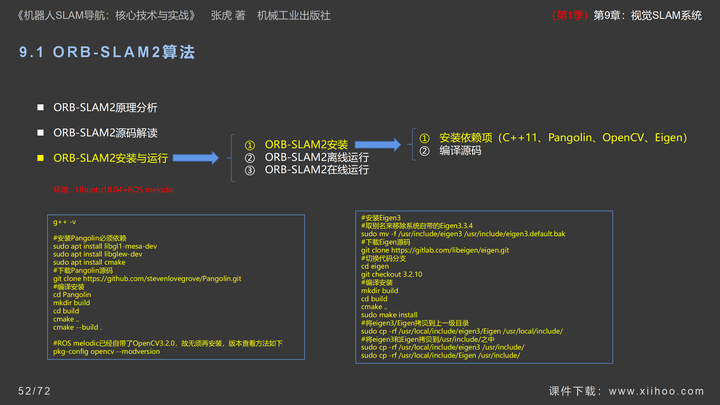
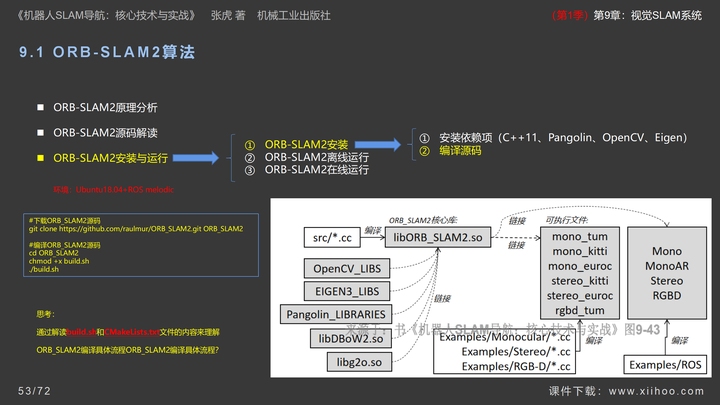
③ORB-SLAM2安装与运行
ORB-SLAM2安装、ORB-SLAM2离线运行、ORB-SLAM2在线运行
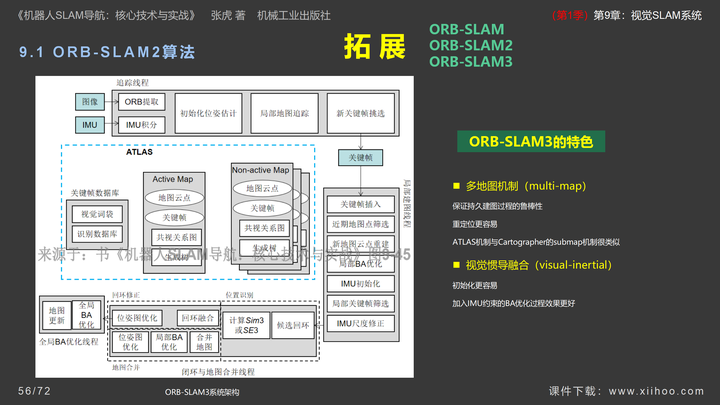
④ORB-SLAM3
多地图机制(multi-map)、视觉惯导融合(visual-inertial)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
9.2 LSD-SLAM算法
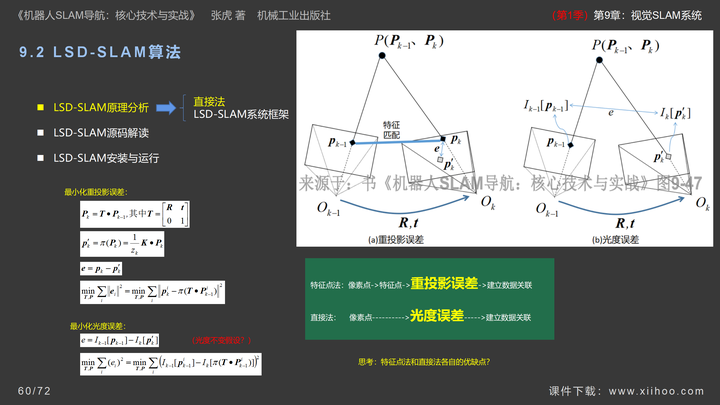
①LSD-SLAM原理分析
直接法、LSD-SLAM系统框架、追踪、深度估计、地图优化
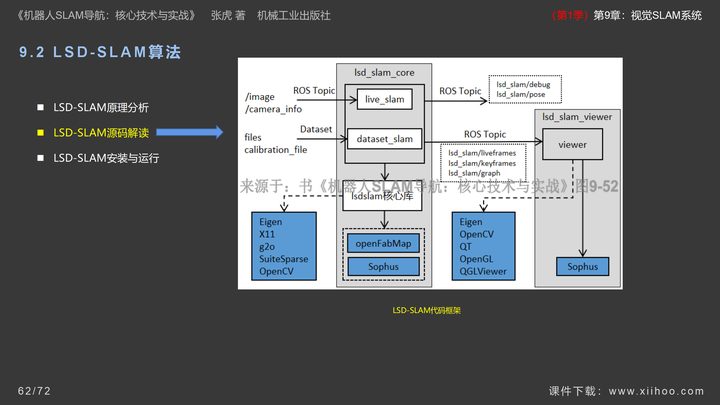
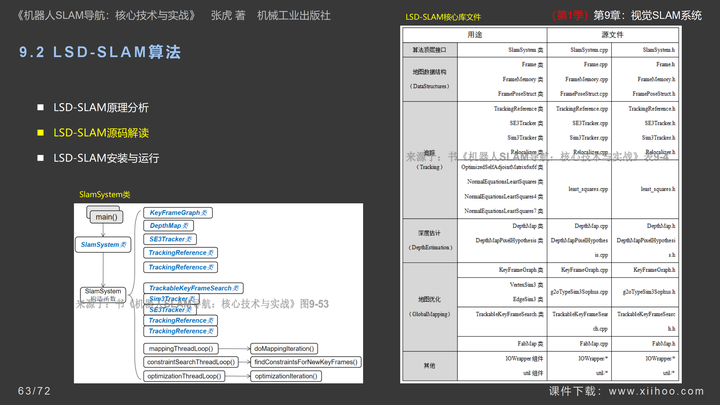
②LSD-SLAM源码解读
LSD-SLAM代码框架、LSD-SLAM核心库文件
③LSD-SLAM安装与运行
LSD-SLAM安装、LSD-SLAM离线运行、LSD-SLAM在线运行
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
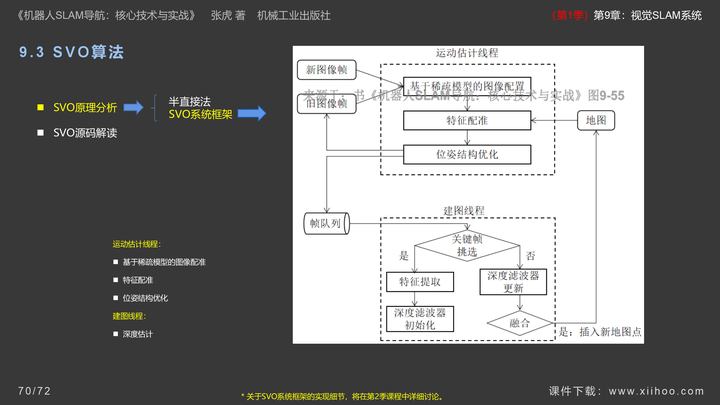
9.3 SVO算法
①SVO原理分析
半直接法、SVO系统框架
②SVO源码解读
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
PPT课件下载:
PDF课件下载: