目录
[2.1.1 法线估计和拼接函数](#2.1.1 法线估计和拼接函数)
[2.1.2 ICP配准算法](#2.1.2 ICP配准算法)
[2.1.3 点云可视化函数](#2.1.3 点云可视化函数)
PCL点云算法汇总及实战案例汇总的目录地址链接:
一、概述
ICP (Iterative Closest Point) 算法是一种用于点云配准的常见方法,它通过迭代来寻找两个点云之间的刚体变换关系。**本文实现了基于KD树加速的点到面ICP算法,该算法在精度配准中比点到点ICP效果更好。**此算法通过使用点云的法线信息来提高点云配准的精度。
1.1原理
ICP算法通过以下步骤进行配准:
- 初始对齐:给定两个点云,源点云和目标点云,ICP在每次迭代中计算每个点与其最近的对应点之间的距离。
- 最小化误差:计算源点云和目标点云之间的最小二乘误差,更新源点云的刚体变换。
- **迭代更新:**重复上述步骤,直到收敛条件满足为止(误差小于指定阈值或迭代次数超过限制)。
在点到面的ICP中,每个源点的最近对应点不仅包括空间坐标,还包括法线信息,使得误差最小化过程更为准确。
1.2实现步骤
- **加载点云数据:**从PCD文件中加载源点云和目标点云。
- **计算法线:**为源点云和目标点云计算法线信息,并拼接到点云中。
- **ICP点到面配准:**利用点到面ICP算法进行精确配准,输出最终的刚体变换矩阵。
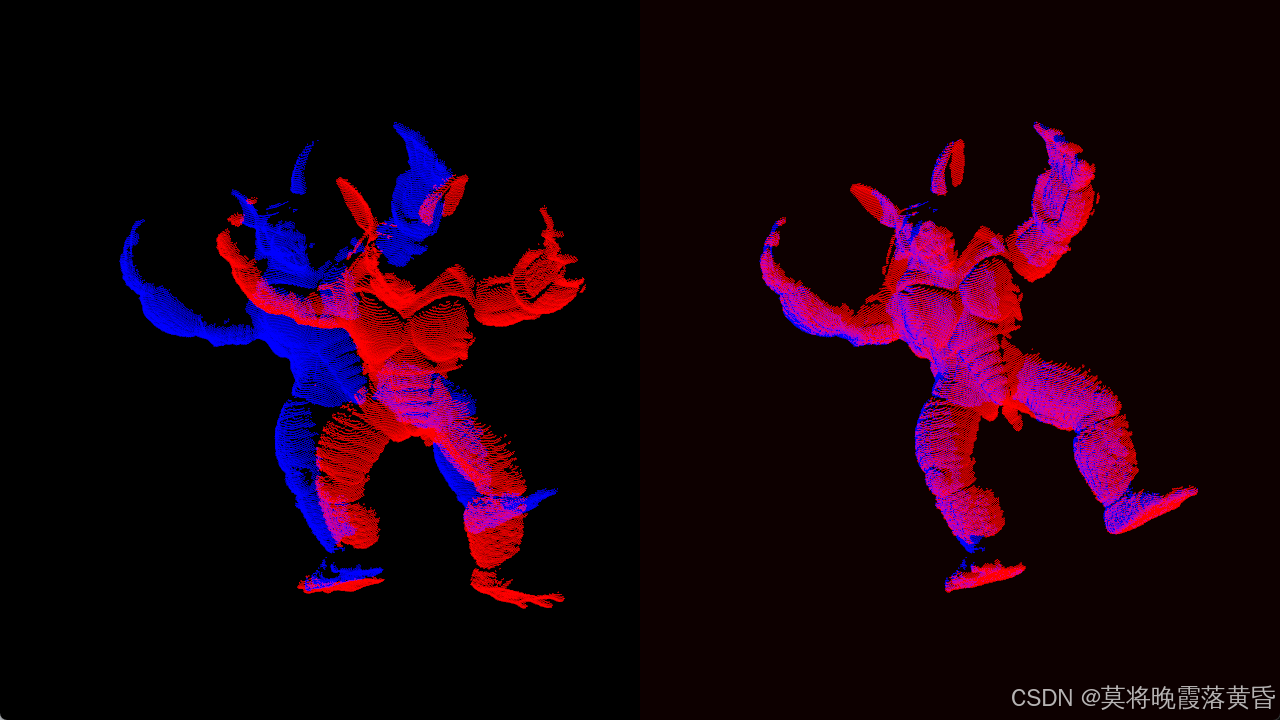
- **结果可视化:**可视化配准前后的点云,显示配准效果。
1.3应用场景
- 精密工业制造中的3D扫描物体配准。
- 机器人定位与导航中的环境点云对齐。
- 建筑模型重建中的多视角数据融合。
二、代码实现
2.1关键函数
2.1.1 法线估计和拼接函数
cpp
void cloud_with_normal(pcl::PointCloud<pcl::PointXYZ>::Ptr& cloud, pcl::PointCloud<pcl::PointNormal>::Ptr& cloud_normals)
{
// OMP并行计算法线,加速法线估计
pcl::NormalEstimationOMP<pcl::PointXYZ, pcl::Normal> n;
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
// 使用KD树进行近邻搜索,优化法线估计速度
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
n.setNumberOfThreads(10); // 设置OpenMP的线程数
n.setInputCloud(cloud);
n.setSearchMethod(tree);
n.setKSearch(10); // 使用K近邻搜索,寻找10个最近点
n.compute(*normals); // 计算法线
// 拼接点云和法线信息,生成包含法线的点云
pcl::concatenateFields(*cloud, *normals, *cloud_normals);
}2.1.2 ICP配准算法
cpp
// 点到面的ICP配准算法封装
void perform_icp_registration(pcl::PointCloud<pcl::PointNormal>::Ptr& source_with_normals,
pcl::PointCloud<pcl::PointNormal>::Ptr& target_with_normals, pcl::PointCloud<pcl::PointNormal>::Ptr& p_icp_cloud)
{
pcl::IterativeClosestPointWithNormals<pcl::PointNormal, pcl::PointNormal> p_icp;
p_icp.setInputSource(source_with_normals);
p_icp.setInputTarget(target_with_normals);
p_icp.setTransformationEpsilon(1e-10); // 设置转换终止条件
p_icp.setMaxCorrespondenceDistance(10); // 设置最大对应距离
p_icp.setEuclideanFitnessEpsilon(0.001); // 设置收敛条件
p_icp.setMaximumIterations(35); // 设置最大迭代次数
p_icp.align(*p_icp_cloud);
std::cout << "\nICP has converged, score is " << p_icp.getFitnessScore() << std::endl;
std::cout << "变换矩阵:\n" << p_icp.getFinalTransformation() << std::endl;
}2.1.3 点云可视化函数
cpp
void visualize_registration(pcl::PointCloud<pcl::PointXYZ>::Ptr& source,
pcl::PointCloud<pcl::PointXYZ>::Ptr& target, pcl::PointCloud<pcl::PointXYZ>::Ptr& icp)
{
// 创建PCL可视化对象
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("配准结果"));
// 创建两个视口用于显示配准前后的点云
int v1 = 0;
int v2 = 1;
viewer->createViewPort(0, 0, 0.5, 1, v1); // 左视口
viewer->createViewPort(0.5, 0, 1, 1, v2); // 右视口
viewer->setBackgroundColor(0, 0, 0, v1); // 左视口背景为黑色
viewer->setBackgroundColor(0.05, 0, 0, v2); // 右视口背景为深灰色
viewer->addText("Raw point clouds", 10, 10, "v1_text", v1); // 左视口标题
viewer->addText("Registed point clouds", 10, 10, "v2_text", v2); // 右视口标题
// 为源点云、目标点云和配准后的点云添加颜色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> src_h(source, 255, 0, 0); // 源点云红色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> tgt_h(target, 0, 0, 255); // 目标点云蓝色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> transe(icp, 255, 0, 0); // 配准后的点云红色
// 将点云添加到对应的视口中
viewer->addPointCloud(source, src_h, "source cloud", v1); // 左视口显示原始点云
viewer->addPointCloud(target, tgt_h, "target cloud", v1); // 左视口显示目标点云
viewer->addPointCloud(target, tgt_h, "target cloud1", v2); // 右视口显示目标点云
viewer->addPointCloud(icp, transe, "pcs cloud", v2); // 右视口显示配准后的点云
// 启动可视化窗口
while (!viewer->wasStopped())
{
viewer->spinOnce(100); // 每100ms刷新一次视图
boost::this_thread::sleep(boost::posix_time::microseconds(10000));
}
}2.2完整代码
cpp
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/registration/icp.h> // 点到面的ICP算法
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
// 计算点云法线并将法线信息拼接到点云数据中
void cloud_with_normal(pcl::PointCloud<pcl::PointXYZ>::Ptr& cloud, pcl::PointCloud<pcl::PointNormal>::Ptr& cloud_normals)
{
pcl::NormalEstimationOMP<pcl::PointXYZ, pcl::Normal> n;
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
n.setNumberOfThreads(10); // 设置并行线程数
n.setInputCloud(cloud);
n.setSearchMethod(tree);
n.setKSearch(10); // 设置近邻点的数量
n.compute(*normals); // 计算法线
// 将点云数据与法线信息拼接
pcl::concatenateFields(*cloud, *normals, *cloud_normals);
}
// 点到面的ICP配准算法封装
void perform_icp_registration(pcl::PointCloud<pcl::PointNormal>::Ptr& source_with_normals,
pcl::PointCloud<pcl::PointNormal>::Ptr& target_with_normals, pcl::PointCloud<pcl::PointNormal>::Ptr& p_icp_cloud, Eigen::Matrix4f& transformation)
{
pcl::IterativeClosestPointWithNormals<pcl::PointNormal, pcl::PointNormal> p_icp;
p_icp.setInputSource(source_with_normals);
p_icp.setInputTarget(target_with_normals);
p_icp.setTransformationEpsilon(1e-10); // 设置转换终止条件
p_icp.setMaxCorrespondenceDistance(10); // 设置最大对应距离
p_icp.setEuclideanFitnessEpsilon(0.001); // 设置收敛条件
p_icp.setMaximumIterations(35); // 设置最大迭代次数
p_icp.align(*p_icp_cloud);
std::cout << "\nICP has converged, score is " << p_icp.getFitnessScore() << std::endl;
transformation = p_icp.getFinalTransformation();
std::cout << "变换矩阵:\n" << transformation << std::endl;
}
// 可视化原始点云与配准后的点云
void visualize_registration(pcl::PointCloud<pcl::PointXYZ>::Ptr& source,
pcl::PointCloud<pcl::PointXYZ>::Ptr& target, pcl::PointCloud<pcl::PointXYZ>::Ptr& icp)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("配准结果"));
int v1 = 0, v2 = 1;
viewer->createViewPort(0, 0, 0.5, 1, v1); // 创建左视口
viewer->createViewPort(0.5, 0, 1, 1, v2); // 创建右视口
viewer->setBackgroundColor(0, 0, 0, v1); // 设置背景颜色
viewer->setBackgroundColor(0.05, 0, 0, v2);
// 设置点云的颜色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> src_h(source, 255, 0, 0); // 源点云颜色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> tgt_h(target, 0, 0, 255); // 目标点云颜色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> transe(icp, 255, 0, 0); // 配准后的点云颜色
viewer->addPointCloud(source, src_h, "source cloud", v1); // 添加源点云
viewer->addPointCloud(target, tgt_h, "target cloud", v1); // 添加目标点云
viewer->addPointCloud(target, tgt_h, "target cloud1", v2); // 目标点云
viewer->addPointCloud(icp, transe, "pcs cloud", v2); // 添加配准后的点云
// 启动可视化窗口
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(10000));
}
}
int main()
{
// 加载源点云数据
pcl::PointCloud<pcl::PointXYZ>::Ptr source(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile<pcl::PointXYZ>("1.pcd", *source);
// 加载目标点云数据
pcl::PointCloud<pcl::PointXYZ>::Ptr target(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile<pcl::PointXYZ>("2.pcd", *target);
// 计算法线并拼接到源点云和目标点云
pcl::PointCloud<pcl::PointNormal>::Ptr source_with_normals(new pcl::PointCloud<pcl::PointNormal>);
cloud_with_normal(source, source_with_normals);
pcl::PointCloud<pcl::PointNormal>::Ptr target_with_normals(new pcl::PointCloud<pcl::PointNormal>);
cloud_with_normal(target, target_with_normals);
// 点到面的ICP配准
pcl::PointCloud<pcl::PointNormal>::Ptr p_icp_cloud(new pcl::PointCloud<pcl::PointNormal>);
Eigen::Matrix4f transformation;
perform_icp_registration(source_with_normals, target_with_normals, p_icp_cloud, transformation);
// 使用ICP计算的刚体变换对源点云进行变换
pcl::PointCloud<pcl::PointXYZ>::Ptr out_cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::transformPointCloud(*source, *out_cloud, transformation);
// 保存配准结果
pcl::io::savePCDFileASCII("test.pcd", *out_cloud);
// 可视化配准结果
visualize_registration(source, target, out_cloud);
return (0);
}三、实现效果