双目立体视觉原理
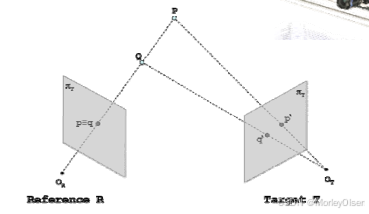
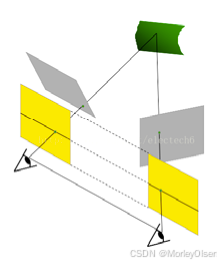
设一个为参考平面,一个为目标平面。增加了一个摄像头后,P与Q在目标面T上有分别的成像点
双目立体视觉:从两个不同的位置观察同一物体,用三角测量原理计算摄像机到该物体的距离的 方法
原理:三角测量
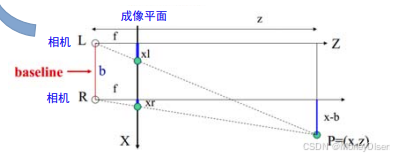
计算:
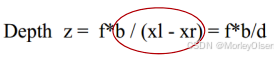
相机焦距 f
左右相机基线 b
视差 d :需要知道左相机的每个像素点(xl, yl)和右相机中对应点(xr, yr)的对应关系
双目相机标定
立体相机标定用于确定立体相机对中相机的内参以及相对位置
得到两个相机的内外参数、单应矩阵
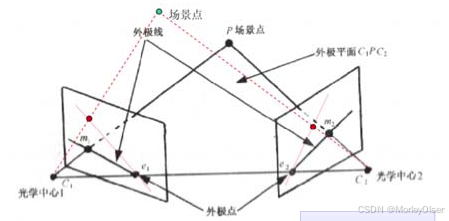
极线与视差计算
极线:
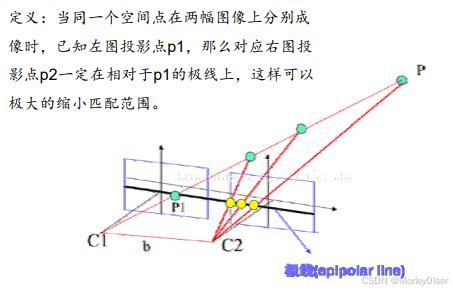
极线约束:在一个图像平面上,所有的外极线都交于外极点
外极平面:通过两个摄像机中心和场景特征点的平面
外极线:外极平面与图像平面的交线
外极点:两台摄像机中心的连线与图像平面的交点
相机C1,C2如果不是在同一直线上:对两张图片用单应矩阵变换
 互相平行
互相平行
图像匹配
对应点应该是在极线附近,搜索范围适当放宽
判断对应点时的问题:
(1)失真与噪声
(2)镜面反射
(3)透视失真
(4)透视缩放
图像"灰度"匹配:通过利用某种相似性度量,如相关函数、协方差函数、差平方和、差绝对值和等测度极值,判定两幅图像中的对应关系
图像"特征"匹配:通过分别提取两个或多个图像的特征(点、线、面等特征),对特征进行参数描述,然后运用所描述的参数来进行匹配
"双目立体视觉"测距步骤
Step 1-确定摄像机的相对几何位置和有关参数,即摄像机的标定(Calibration)
Step 2-寻找在两幅图像中都便于区分的特征,或用于匹配的 基元
Step 3-把左、右两幅图像中的有关特征进行匹配,即解决特征匹配的方法问题
Step 4-根据视差计算成像物体相对摄像机的距离
"双目立体视觉"应用特点
对相机硬件要求低,成本低
对环境光照非常敏感
不适用于单调缺乏纹理的场景
计算复杂度高,需要逐像素计算匹配
相机基线限制了测量范围:基线越大,测量范围越远