论文介绍
题目:MUST: The First Dataset and Unified Framework for Multispectral UAV Single Object Tracking
期刊:IEEE/CVF Computer Vision and Pattern Recognition Conference
论文:https://arxiv.org/abs/2503.17699
数据:https://github.com/q2479036243/MUST-Multispectral-UAV-Single-Object-Tracking
年份:2025
单位:北京理工大学
【遥感图像分类实战视频教程】
创新点
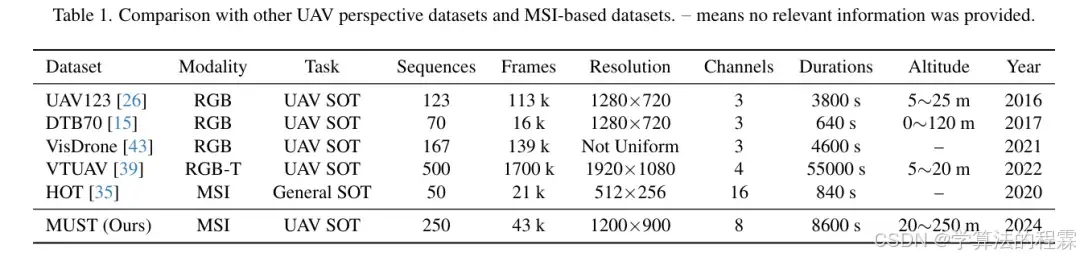
提出了首个面向无人机多光谱单目标跟踪的大规模数据集(MUST),包含250个视频序列,涵盖12类真实挑战情境,填补了该领域的空白。
构建了统一融合光谱、空间和时间特征的跟踪框架(UNTrack),综合利用历史光谱提示、初始模板和连续帧信息,提高在复杂场景中的鲁棒性。
引入非对称注意力机制和光谱背景抑制模块,有效降低计算量,提升了目标定位的精度和效率。
设计了光谱提示编码器并结合参数迁移策略,使RGB预训练模型能有效适用于多光谱任务,大幅提升模型性能。
数据
MUST 数据集
-
基本信息
包含 250 个多光谱视频序列,共 42671 帧,分辨率为 1200×900,帧率 5 fps。
-
光谱特征
每帧图像具有 8 个波段,覆盖 390--950 nm,涵盖可见光与近红外,增强目标与背景的光谱可分性。
-
挑战属性
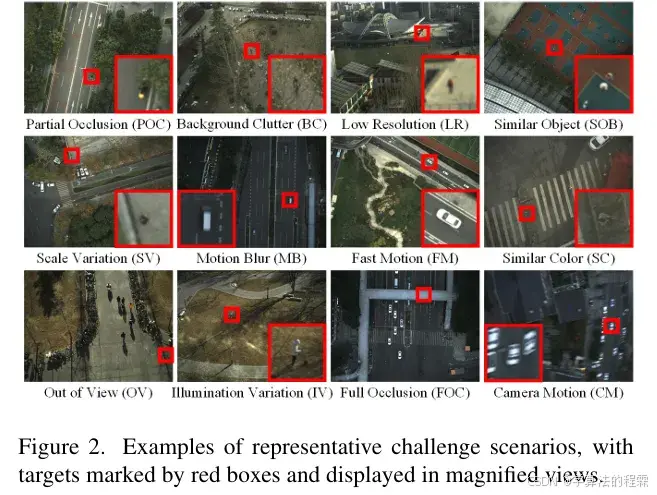
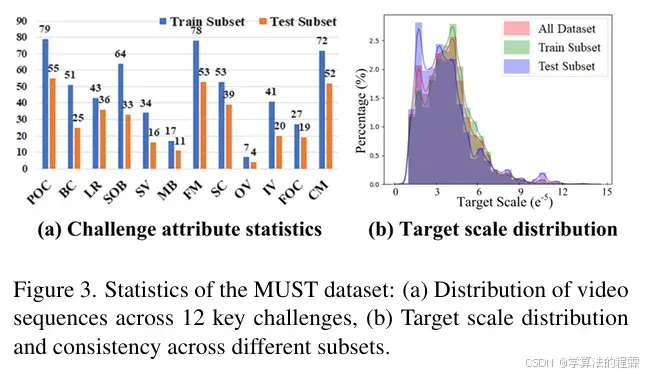
每个序列标注了 12 类跟踪挑战,如遮挡、快速运动、相似颜色、背景杂乱、出视野等,全面模拟真实无人机跟踪环境。
-
采集与标注
数据由无人机搭载多光谱相机采集,飞行高度 20--250 米。所有图像经几何与辐射校正,并由人工精确标注目标框和遮挡状态。
方法
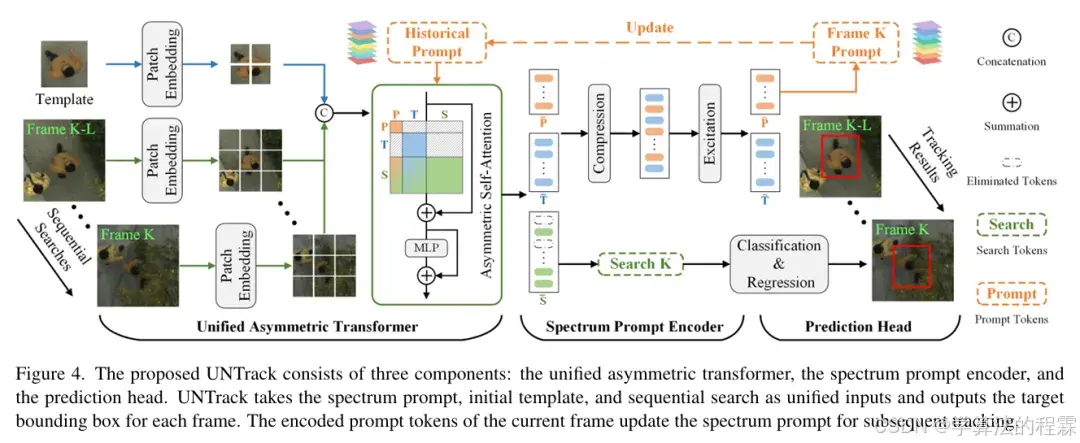
本文提出了一种名为 UNTrack 的多光谱无人机目标跟踪框架。该方法通过统一建模光谱、空间和时间特征,提升在复杂场景下的跟踪鲁棒性与效率。整体结构包括三个主要模块:统一非对称Transformer、光谱提示编码器,以及预测头。
该模块的目标是从多个维度提取目标的判别特征,具体包括:
-
输入信息:将历史帧的光谱提示、初始模板图像和连续搜索帧作为统一输入,构建一个融合的特征序列。
-
非对称注意力机制:与标准Transformer不同,UNTrack只保留与目标定位密切相关的注意力路径,例如模板与搜索帧之间的交互,历史提示与搜索帧之间的交互等;而剪除掉冗余或干扰性的部分(如模板与提示之间的相互作用),以降低计算开销并减少噪声干扰。
-
搜索序列输入:不同于只用当前帧进行搜索,UNTrack引入连续帧作为序列输入,从而更好地建模目标在时间上的连续性和运动轨迹。
-
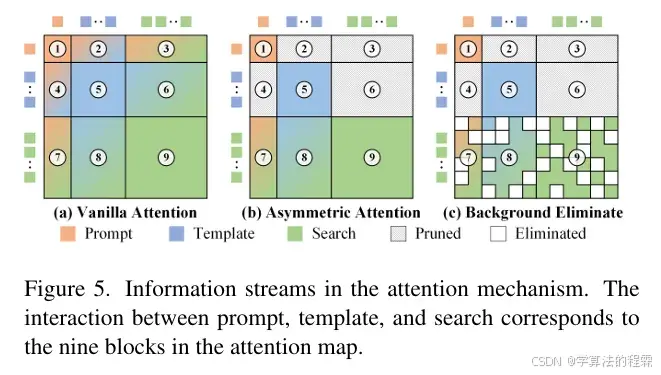
2. 光谱背景消除机制
为减少背景干扰和计算成本,UNTrack在Transformer中嵌入了一个背景消除模块,流程如下:
-
基于注意力结果判断图像中各区域与目标的相关性。
-
只保留与目标高度相关的区域作为候选,其余区域视为背景并剔除。
-
候选区域比例会在训练中动态调整,以适应不同场景下的目标显著性。
该机制利用多光谱信息增强了目标与背景的光谱差异感知,能够有效过滤外部干扰。
3. 光谱提示编码器
该模块用于生成并更新代表目标材料特征的光谱提示,具体做法如下:
-
首先,将历史光谱提示与当前模板信息进行特征融合,提取目标的稳定光谱特征。
-
使用 compression-excitation机制(通过轻量卷积和多层感知机)聚焦关键光谱通道,抑制冗余信息。
-
最终输出一个紧凑的光谱向量,用作下一个时间点的跟踪输入,从而增强跨帧一致性。
该设计确保了模型能持续感知目标的"材料本质",即使目标在颜色或外形上发生变化,也能维持准确跟踪。
4. 预测头与损失设计
UNTrack采用双分支预测头来同时进行目标定位与分类:
-
一条分支用于输出目标位置的边界框。
-
另一条分支用于输出每个候选区域是否为目标的置信度。
训练阶段使用了常见的分类损失与边界框回归损失,保证定位精度和分类准确性。
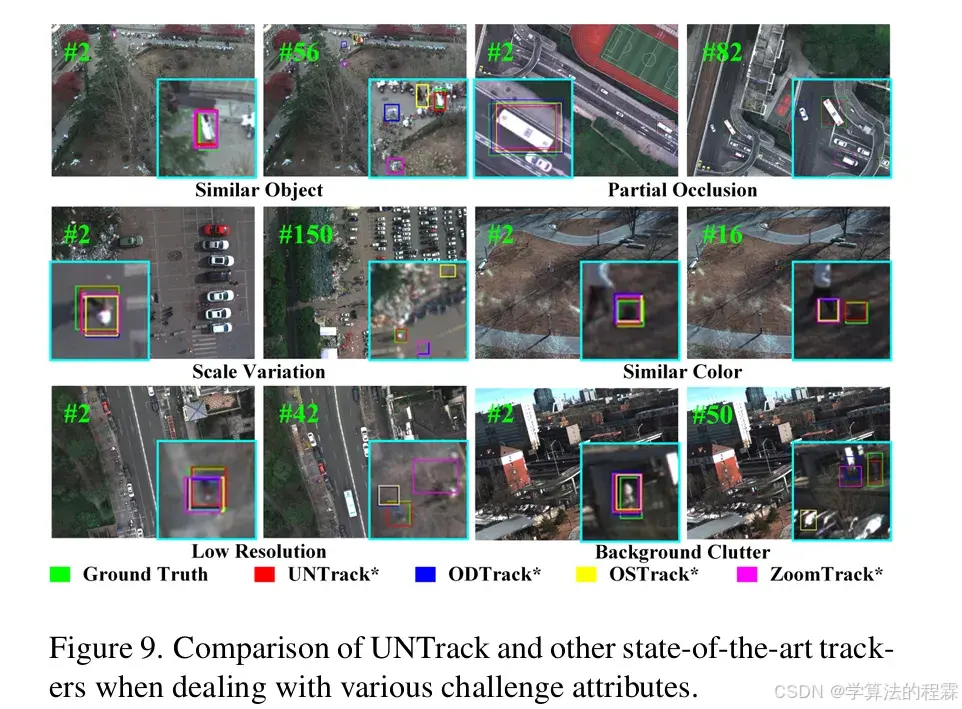
结果与分析
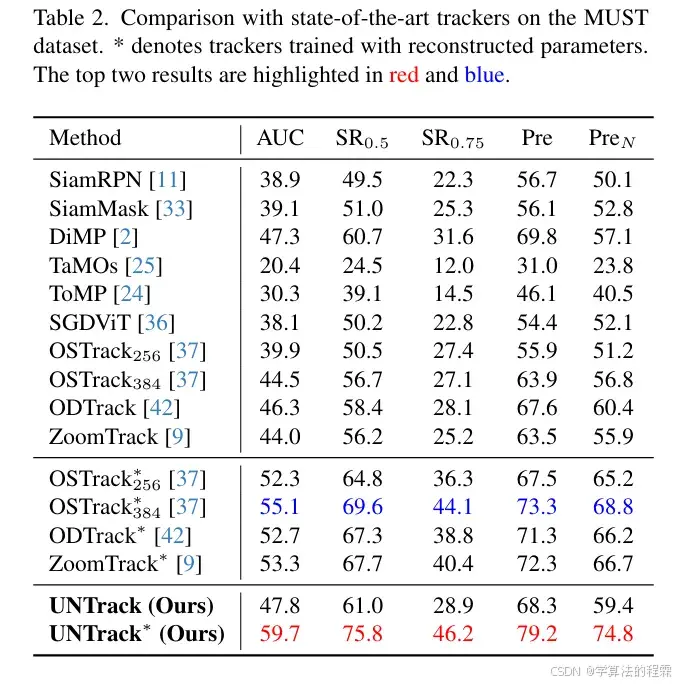
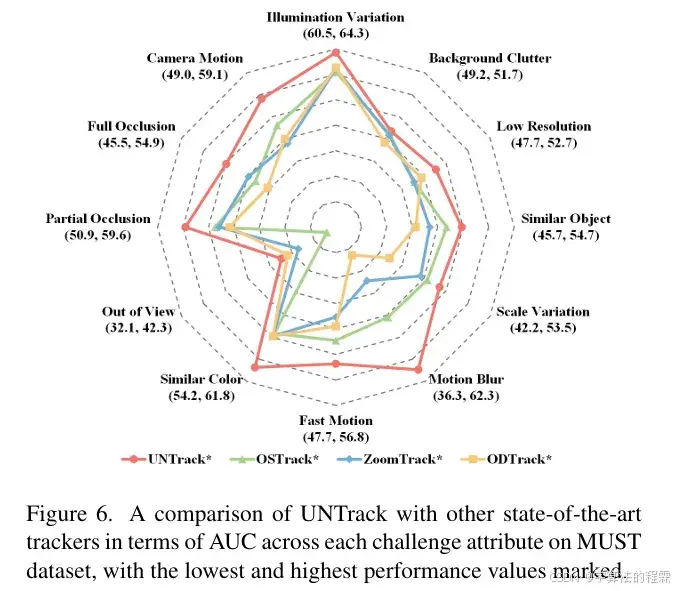
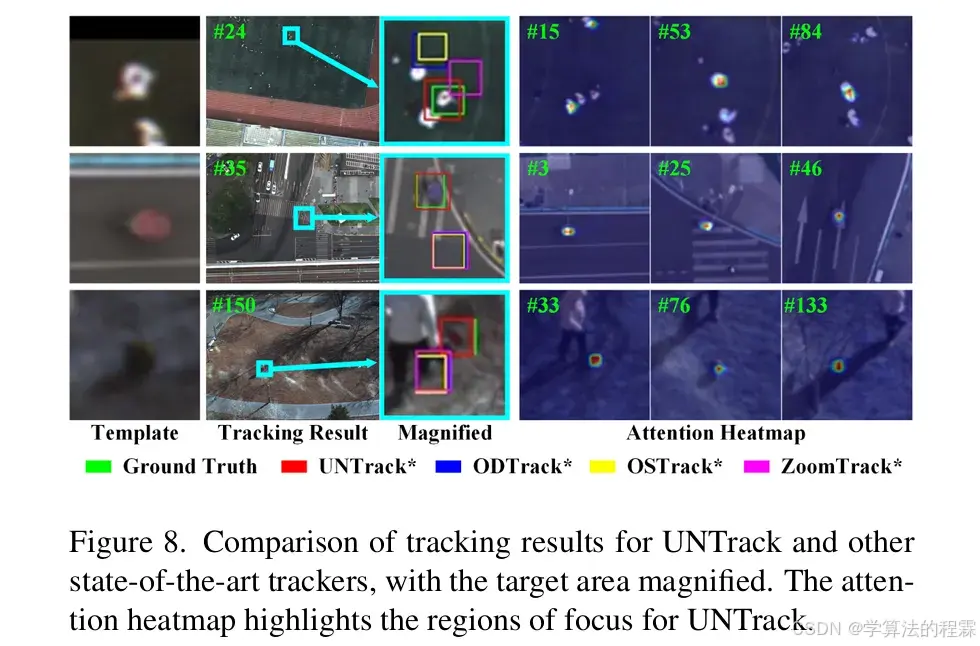
本文方法在多光谱无人机跟踪数据集上全面优于现有主流方法,表现出更强的鲁棒性和适应性。同时在多光谱和RGB通用数据集上也展现出良好的迁移能力,证明了其结构的通用性与效率。
【遥感图像分类实战视频教程】