看了网上的很多的SPI+DMA的代码,感觉都有一些缺陷,就是基本都是需要有手动等待DMA完成的这个操作,我感觉这种等待操作在很大程度上浪费了时间,那么我加入的"队列"就是一种将等待时间利用起来的方法。
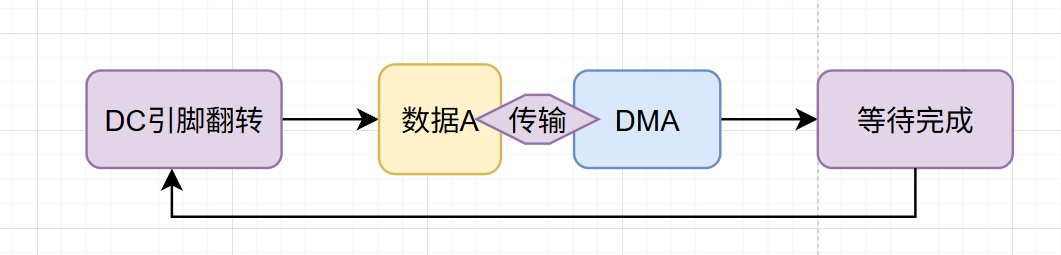
原本的SPI+DMA的操作逻辑如下图,是比较简单的
下面是我加入队列逻辑的过程图,会变得比较庞大,占用的内容资源也多会比较多,需要斟酌使用
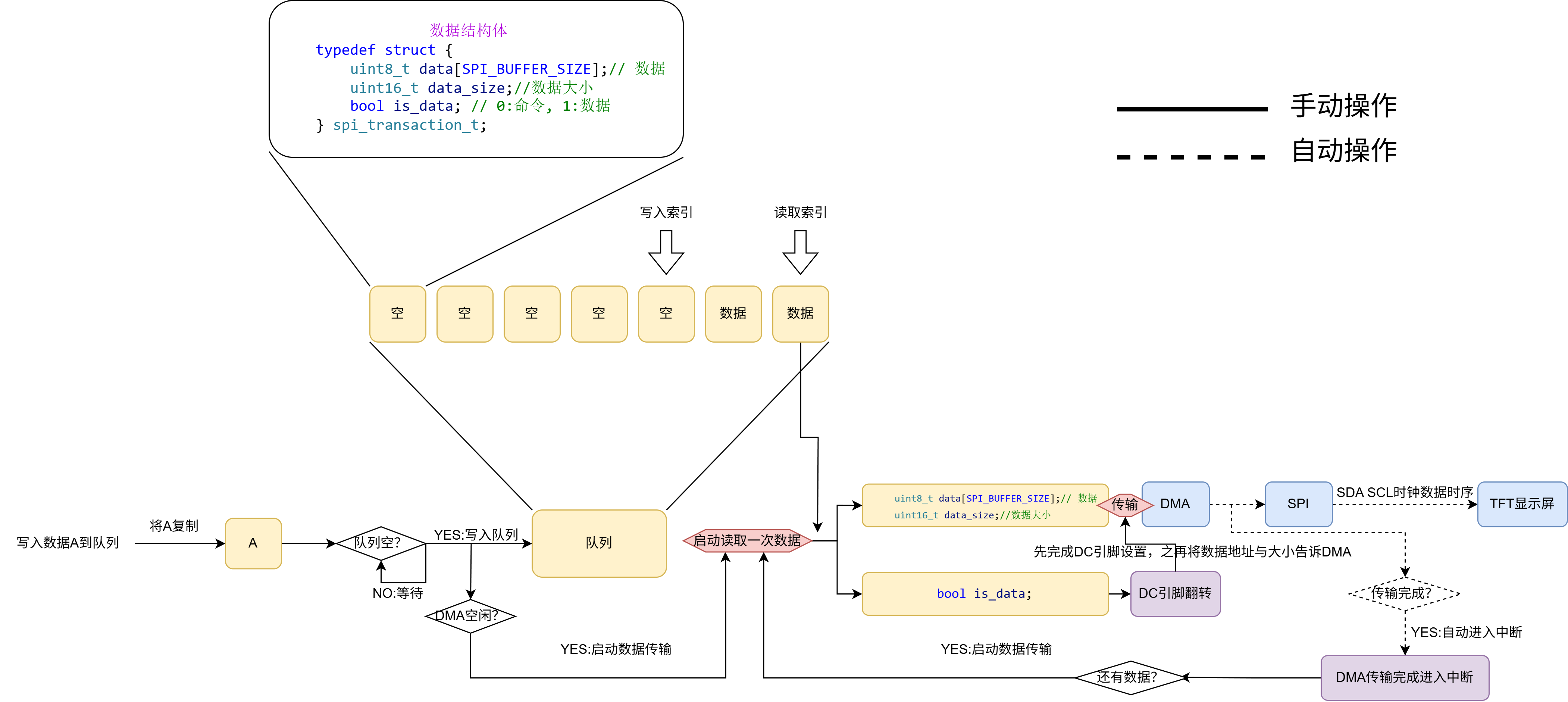
加入队列前的基本流程是控制"DC电平->写入数据->等待DMA传输完成->DC电平->写入数据->等待DMA传输完成"这种操作是很浪费时间资源的,那么加入队列之后的操作是"写入数据->写入数据->写入数据"大部分时间都在写入队列与中断中,其它部分都是DMA自己在传输数据,不需要一直等待
我会在最后放一个完整的代码(我使用的是ST7789,其中的执行代码是适配LVGL的)包括我自己使用芯片的驱动,有需要的可以直接拿走,基本上只需要修改一点点就可以用了。
首先是队列的创建,我这里只是简单写了一下,这个队列创建很占内存,内存分配也不是很灵活,其中忙标志也没有锁,小概率会出事,的如果有大佬的话可以修改一下,使其更完善一点
cpp
#define SPI_BUFFER_SIZE 4096
#define SPI_QUEUE_SIZE 8
//数据结构体
typedef struct {
uint8_t data[SPI_BUFFER_SIZE];
uint16_t data_size;
bool is_data; // 0:命令, 1:数据 用于控制DC
} spi_transaction_t;
// 全局传输队列
spi_transaction_t tx_queue[SPI_QUEUE_SIZE];
//队列索引
volatile uint16_t tx_read_index = 0;
volatile uint16_t tx_write_index = 0;
volatile uint16_t tx_count = 0;
//DMA忙标志
volatile uint8_t dma_busy = 0;之后是队列数据的输入,需要输入数据地址,数据大小还有DC电平翻转方向(0命令/1数据),如果是ESP32的话好像可以实现DC的自动翻转,会方便很多,这里实现不了,就只能在DMA之前先把DC翻转给提前完成 if (tx->is_data)。还要注意队列的索引变化
cpp
/******************************************************************************
函数说明:添加SPI传输任务到队列
******************************************************************************/
static void LCD_Add_To_Queue(uint8_t *data, uint16_t size, uint8_t is_data)
{
// 等待队列有空位(非阻塞式可添加超时机制)
while (tx_count >= SPI_QUEUE_SIZE) {
// 可在此处添加少量延迟或任务调度
}
// 复制数据到队列
uint8_t index = tx_write_index;
memcpy(tx_queue[index].data, data, size);
tx_queue[index].data_size = size;
tx_queue[index].is_data = is_data;
// 更新队列索引
tx_write_index = (tx_write_index + 1) % SPI_QUEUE_SIZE;
tx_count++;
// 如果DMA空闲,立即启动传输
if (!dma_busy) {
LCD_Start_Next_Transaction();
}
}
/******************************************************************************
函数说明:启动下一个DMA传输任务
******************************************************************************/
static void LCD_Start_Next_Transaction(void)
{
if (tx_count == 0)
{
//lv_disp_t *disp = lv_disp_get_default();
//if (disp != NULL) {
// lv_disp_flush_ready(disp->driver);
//}这个是为了适配LVGL加的
return;
}
else if(dma_busy)
{
return;
}
uint8_t index = tx_read_index;
spi_transaction_t *tx = &tx_queue[index];
// 设置DC引脚
if (tx->is_data) {
OLED_DC_Set(); // 数据模式
} else {
OLED_DC_Clr(); // 命令模式
}
OLED_CS_Clr();
dma_busy = 1;
HAL_SPI_Transmit_DMA(&hspi1, tx->data, tx->data_size);
}然后最后一个是DMA传输完成的回调,进入回调后需要寻找队列中是否还有数据,如果还有数据,就把数据传给DMA
cpp
/******************************************************************************
函数说明:DMA传输完成回调
******************************************************************************/
void HAL_SPI_TxCpltCallback(SPI_HandleTypeDef *hspi)
{
if (hspi == &hspi1) {
OLED_CS_Set(); // 传输完成,拉高CS
dma_busy = 0;
// 更新队列
tx_read_index = (tx_read_index + 1) % SPI_QUEUE_SIZE;
tx_count--;
// 立即启动下一个传输
if (tx_count == 0)
{
//lv_disp_t *disp = lv_disp_get_default();
//if (disp != NULL) {
// lv_disp_flush_ready(disp->driver);
//}这个是为了适配LVGL
}
else if (tx_count > 0) {
LCD_Start_Next_Transaction();
}
}
}最后是完整版本的代码
cpp
#include "oled.h"
#include <stdbool.h>
#include <stdint.h>
//#include "lvgl.h"
#include "stm32f4xx_hal.h"
// 在oled.h中定义
#define SPI_BUFFER_SIZE 4096
#define SPI_QUEUE_SIZE 8
typedef struct {
uint8_t data[SPI_BUFFER_SIZE];
uint16_t data_size;
bool is_data; // 0:命令, 1:数据
} spi_transaction_t;
// 全局传输队列
spi_transaction_t tx_queue[SPI_QUEUE_SIZE];
//队列索引
volatile uint16_t tx_read_index = 0;
volatile uint16_t tx_write_index = 0;
volatile uint16_t tx_count = 0;
//DMA忙标志
volatile uint8_t dma_busy = 0;
// 外部 SPI 句柄
extern SPI_HandleTypeDef hspi1;
/******************************************************************************
函数说明:启动下一个DMA传输任务
******************************************************************************/
static void LCD_Start_Next_Transaction(void)
{
if (tx_count == 0)
{
//lv_disp_t *disp = lv_disp_get_default();
//if (disp != NULL) {
// lv_disp_flush_ready(disp->driver); // 正确!
//}
return;
}
else if(dma_busy)
{
return;
}
uint8_t index = tx_read_index;
spi_transaction_t *tx = &tx_queue[index];
// 设置DC引脚
if (tx->is_data) {
OLED_DC_Set(); // 数据模式
} else {
OLED_DC_Clr(); // 命令模式
}
OLED_CS_Clr();
dma_busy = 1;
HAL_SPI_Transmit_DMA(&hspi1, tx->data, tx->data_size);
}
/******************************************************************************
函数说明:添加SPI传输任务到队列
******************************************************************************/
static void LCD_Add_To_Queue(uint8_t *data, uint16_t size, uint8_t is_data)
{
// 等待队列有空位(非阻塞式可添加超时机制)
while (tx_count >= SPI_QUEUE_SIZE) {
// 可在此处添加少量延迟或任务调度
}
// 复制数据到队列
uint8_t index = tx_write_index;
memcpy(tx_queue[index].data, data, size);
tx_queue[index].data_size = size;
tx_queue[index].is_data = is_data;
// 更新队列索引
tx_write_index = (tx_write_index + 1) % SPI_QUEUE_SIZE;
tx_count++;
// 如果DMA空闲,立即启动传输
if (!dma_busy) {
LCD_Start_Next_Transaction();
}
}
/******************************************************************************
函数说明:DMA传输完成回调
******************************************************************************/
void HAL_SPI_TxCpltCallback(SPI_HandleTypeDef *hspi)
{
if (hspi == &hspi1) {
OLED_CS_Set(); // 传输完成,拉高CS
dma_busy = 0;
// 更新队列
tx_read_index = (tx_read_index + 1) % SPI_QUEUE_SIZE;
tx_count--;
// 立即启动下一个传输
if (tx_count == 0)
{
//lv_disp_t *disp = lv_disp_get_default();
//if (disp != NULL) {
// lv_disp_flush_ready(disp->driver);
//}
}
else if (tx_count > 0) {
LCD_Start_Next_Transaction();
}
}
}
/******************************************************************************
函数说明:DMA传输错误回调
******************************************************************************/
void HAL_SPI_ErrorCallback(SPI_HandleTypeDef *hspi)
{
if (hspi == &hspi1) {
//OLED_CS_Set(); // 错误时也要拉高CS
dma_busy = 0;
// 可添加错误处理逻辑
}
}
/******************************************************************************
函数说明:LCD写命令
******************************************************************************/
void LCD_WR_REG(u8 dat)
{
LCD_Add_To_Queue(&dat, 1, 0); // 0表示命令
}
/******************************************************************************
函数说明:LCD写8位数据
******************************************************************************/
void LCD_WR_DATA8(u8 dat)
{
LCD_Add_To_Queue(&dat, 1, 1); // 1表示数据
}
/******************************************************************************
函数说明:LCD写16位数据
******************************************************************************/
void LCD_WR_DATA(u16 dat)
{
uint8_t temp[2] = {dat >> 8, dat & 0xFF};
LCD_Add_To_Queue(temp, 2, 1); // 1表示数据
}
/******************************************************************************
函数说明:批量写入数据(优化性能)
******************************************************************************/
void LCD_Write_Bulk(uint8_t *data, uint16_t size)
{
LCD_Add_To_Queue(data, size, 1);
}
/******************************************************************************
函数说明:设置显示区域起始坐标和结束坐标
参数说明:x1,x2 起始和结束的列地址
y1,y2 起始和结束的行地址
返回值: 无
******************************************************************************/
void LCD_Address_Set(u16 x1, u16 y1, u16 x2, u16 y2)
{
if (USE_HORIZONTAL == 0)
{
LCD_WR_REG(0x2A); // Column Address Set
LCD_WR_DATA(x1);
LCD_WR_DATA(x2);
LCD_WR_REG(0x2B); // Page Address Set
LCD_WR_DATA(y1);
LCD_WR_DATA(y2);
LCD_WR_REG(0x2C); // Memory Write
}
else if (USE_HORIZONTAL == 1)
{
LCD_WR_REG(0x2A);
LCD_WR_DATA(y1); // 注意:x 和 y 互换
LCD_WR_DATA(y2);
LCD_WR_REG(0x2B);
LCD_WR_DATA(239 - x2); // 坐标翻转
LCD_WR_DATA(239 - x1);
LCD_WR_REG(0x2C);
}
else if (USE_HORIZONTAL == 2)
{
LCD_WR_REG(0x2A);
LCD_WR_DATA(239 - x2);
LCD_WR_DATA(239 - x1);
LCD_WR_REG(0x2B);
LCD_WR_DATA(319 - y2);
LCD_WR_DATA(319 - y1);
LCD_WR_REG(0x2C);
}
else if (USE_HORIZONTAL == 3)
{
LCD_WR_REG(0x2A);
LCD_WR_DATA(319 - y2);
LCD_WR_DATA(319 - y1);
LCD_WR_REG(0x2B);
LCD_WR_DATA(x1);
LCD_WR_DATA(x2);
LCD_WR_REG(0x2C);
}
}
/******************************************************************************
函数说明:LCD初始化
参数说明:无
返回值: 无
******************************************************************************/
void Lcd_Init(void)
{
OLED_RES_Clr();
HAL_Delay(200);
OLED_RES_Set();
HAL_Delay(100);
//************* Start Initial Sequence **********//
LCD_WR_REG(0x36);
if (USE_HORIZONTAL == 0) LCD_WR_DATA8(0x00);
else if (USE_HORIZONTAL == 1) LCD_WR_DATA8(0xC0);
else if (USE_HORIZONTAL == 2) LCD_WR_DATA8(0x70);
else LCD_WR_DATA8(0xA0);
LCD_WR_REG(0x3A);
LCD_WR_DATA8(0x05);
LCD_WR_REG(0xB2);
LCD_WR_DATA8(0x0C);
LCD_WR_DATA8(0x0C);
LCD_WR_DATA8(0x00);
LCD_WR_DATA8(0x33);
LCD_WR_DATA8(0x33);
LCD_WR_REG(0xB7);
LCD_WR_DATA8(0x35);
LCD_WR_REG(0xBB);
LCD_WR_DATA8(0x19);
LCD_WR_REG(0xC0);
LCD_WR_DATA8(0x2C);
LCD_WR_REG(0xC2);
LCD_WR_DATA8(0x01);
LCD_WR_REG(0xC3);
LCD_WR_DATA8(0x12);
LCD_WR_REG(0xC4);
LCD_WR_DATA8(0x20);
LCD_WR_REG(0xC6);
LCD_WR_DATA8(0x0F);
LCD_WR_REG(0xD0);
LCD_WR_DATA8(0xA4);
LCD_WR_DATA8(0xA1);
LCD_WR_REG(0xE0);
LCD_WR_DATA8(0xD0);
LCD_WR_DATA8(0x04);
LCD_WR_DATA8(0x0D);
LCD_WR_DATA8(0x11);
LCD_WR_DATA8(0x13);
LCD_WR_DATA8(0x2B);
LCD_WR_DATA8(0x3F);
LCD_WR_DATA8(0x54);
LCD_WR_DATA8(0x4C);
LCD_WR_DATA8(0x18);
LCD_WR_DATA8(0x0D);
LCD_WR_DATA8(0x0B);
LCD_WR_DATA8(0x1F);
LCD_WR_DATA8(0x23);
LCD_WR_REG(0xE1);
LCD_WR_DATA8(0xD0);
LCD_WR_DATA8(0x04);
LCD_WR_DATA8(0x0C);
LCD_WR_DATA8(0x11);
LCD_WR_DATA8(0x13);
LCD_WR_DATA8(0x2C);
LCD_WR_DATA8(0x3F);
LCD_WR_DATA8(0x44);
LCD_WR_DATA8(0x51);
LCD_WR_DATA8(0x2F);
LCD_WR_DATA8(0x1F);
LCD_WR_DATA8(0x1F);
LCD_WR_DATA8(0x20);
LCD_WR_DATA8(0x23);
LCD_WR_REG(0x21); // 逆显示
LCD_WR_REG(0x11); // Sleep Out
HAL_Delay(120);
LCD_WR_REG(0x29); // Display On
}
/******************************************************************************
函数说明:填充指定区域
参数说明:xsta,ysta 起始坐标
xend,yend 结束坐标
返回值: 无
******************************************************************************/
void LCD_Fill(u16 xsta, u16 ysta, u16 xend, u16 yend, u16 *color) {
LCD_Address_Set(xsta, ysta, xend, yend);
uint32_t total_pixels = (xend - xsta + 1) * (yend - ysta + 1);
uint8_t *color_byte = (uint8_t*)color; // 转换为字节指针
uint32_t transferred_pixels = 0;
while (transferred_pixels < total_pixels) {
// 每次传输最大块(SPI_BUFFER_SIZE字节 = 缓冲区容量)
uint32_t chunk_bytes = SPI_BUFFER_SIZE;
// 剩余像素对应的字节数 = (总像素 - 已传像素) * 2
uint32_t remaining_bytes = (total_pixels - transferred_pixels) * 2;
if (chunk_bytes > remaining_bytes) {
chunk_bytes = remaining_bytes;
}
// 入队当前块
LCD_Write_Bulk(color_byte + (transferred_pixels * 2), chunk_bytes);
transferred_pixels += chunk_bytes / 2; // 字节数转像素数
}
}
// 临时缓冲区:10 行
static u16 fill_buf[LCD_H * 10];
/**
* @brief 测试:逐块填充整个屏幕为蓝色
*/
void test_fill_entire_screen_blue(void)
{
uint16_t y;
HAL_Delay(500);
// 填充当前块为蓝色
for (int i = 0; i < LCD_H * 10; i++) {
fill_buf[i] = YELLOW;
}
// 从 Y=0 开始,每次填充 10 行,直到填满 240 行
for (y = 0; y < LCD_H; y += 10) {
uint16_t y_end = (y + 9) < LCD_H ? (y + 9) : (LCD_H - 1);
LCD_Fill(0, y, LCD_W, y_end, fill_buf);
}
}还有对应的.h文件
cpp
#ifndef __OLED_H
#define __OLED_H
#include "main.h"
#include "stdlib.h"
#include "string.h"
#define USE_HORIZONTAL 0
#if USE_HORIZONTAL == 0 || USE_HORIZONTAL == 2
#define LCD_W 240
#define LCD_H 320
#else
#define LCD_W 320
#define LCD_H 240
#endif
#define u8 unsigned char
#define u16 unsigned int
#define u32 unsigned long
#define OLED_CS_Clr() HAL_GPIO_WritePin(LCD_CS_GPIO_Port, LCD_CS_Pin, GPIO_PIN_RESET)
#define OLED_CS_Set() HAL_GPIO_WritePin(LCD_CS_GPIO_Port, LCD_CS_Pin, GPIO_PIN_SET)
#define OLED_DC_Clr() HAL_GPIO_WritePin(LCD_DC_GPIO_Port, LCD_DC_Pin, GPIO_PIN_RESET)
#define OLED_DC_Set() HAL_GPIO_WritePin(LCD_DC_GPIO_Port, LCD_DC_Pin, GPIO_PIN_SET)
#define OLED_RES_Clr() HAL_GPIO_WritePin(LCD_RST_GPIO_Port, LCD_RST_Pin, GPIO_PIN_RESET)
#define OLED_RES_Set() HAL_GPIO_WritePin(LCD_RST_GPIO_Port, LCD_RST_Pin, GPIO_PIN_SET)
#define OLED_CMD 0
#define OLED_DATA 1
void Lcd_Init(void);
void test_fill_entire_screen_blue(void);
#define WHITE 0xFFFF
#define BLACK 0x0000
#define BLUE 0x001F
#define BRED 0XF81F
#define GRED 0x07E0
#define GBLUE 0X07FF
#define RED 0xF800
#define MAGENTA 0xF81F
#define GREEN 0x07E0
#define CYAN 0x7FFF
#define YELLOW 0xFFE0
#define BROWN 0XBC40
#define BRRED 0XFC07
#define GRAY 0X8430
#define DARKBLUE 0X01CF
#define LIGHTBLUE 0X7D7C
#define GRAYBLUE 0X5458
#define LIGHTGREEN 0X841F
#define LGRAY 0XC618
#define LGRAYBLUE 0XA651
#define LBBLUE 0X2B12
#endif