目录
[(四)传统 Transformer 与 Universal Transformer 的架构差异](#(四)传统 Transformer 与 Universal Transformer 的架构差异)
[二、Universal Transformer(UT)模型的数学原理](#二、Universal Transformer(UT)模型的数学原理)
[模块 1:多头自注意力(Multi-Head Attention)](#模块 1:多头自注意力(Multi-Head Attention))
[1.1 基础:缩放点积注意力(Single-Head)](#1.1 基础:缩放点积注意力(Single-Head))
[1.2 多头扩展(Multi-Head)](#1.2 多头扩展(Multi-Head))
[模块 2:UT 层状态更新(UniversalTransformerLayer)](#模块 2:UT 层状态更新(UniversalTransformerLayer))
[2.1 层归一化(LayerNorm)](#2.1 层归一化(LayerNorm))
[2.2 残差连接与状态更新](#2.2 残差连接与状态更新)
[模块 3:自适应计算时间(ACT)机制](#模块 3:自适应计算时间(ACT)机制)
[3.1 停止概率(Halt Probability)](#3.1 停止概率(Halt Probability))
[3.2 有效停止概率与累积信号](#3.2 有效停止概率与累积信号)
[3.3 活跃掩码更新](#3.3 活跃掩码更新)
[3.4 剩余概率(防止过冲)](#3.4 剩余概率(防止过冲))
[3.5 ACT 状态更新](#3.5 ACT 状态更新)
[4.1 位置嵌入(固定正弦余弦)](#4.1 位置嵌入(固定正弦余弦))
[4.2 时间嵌入(可学习)](#4.2 时间嵌入(可学习))
[4.3 二维嵌入融合](#4.3 二维嵌入融合)
[5.1 预测损失(交叉熵)](#5.1 预测损失(交叉熵))
[5.2 ACT正则项(惩罚过度迭代)](#5.2 ACT正则项(惩罚过度迭代))
[5.3 总损失](#5.3 总损失)
[四、Universal Transformer(UT)模型的Python代码完整实现](#四、Universal Transformer(UT)模型的Python代码完整实现)
一、引言
Transformer 模型凭借自注意力机制实现了并行计算能力与全局感受野,成为自然语言处理、计算机视觉等领域的基础架构。其核心优势包括并行处理长序列数据的高效性、捕捉全局依赖关系的能力,以及作为 GPT、BERT 等模型基础的可扩展性。然而,标准 Transformer 存在两大关键局限性:一是固定计算资源分配机制 ,即对序列中每个符号(token)执行相同次数的层堆叠变换,无法根据输入复杂度动态调整计算量;二是缺乏循环归纳偏置 ,固定深度的前馈结构难以建模迭代式推理过程,导致在长序列泛化(如复制字符串、逻辑推理)和算法任务中表现不佳,且理论上不具备图灵完备性。这些缺陷促使研究者探索更通用的序列建模架构,Universal Transformer(UT)由此应运而生。
UT 作为 Transformer 的泛化形式,旨在融合前馈序列模型的并行性与循环神经网络(RNN 的递归归纳偏置,其核心创新体现在三大机制上,共同实现了计算通用性与动态适应性的突破。
(一)并行时间递归结构:参数共享与全局-循环融合
UT 摒弃了标准 Transformer 中"固定堆栈的不同变换函数"设计,转而采用跨层参数共享的循环转换函数 ,在多个时间步骤中并行应用于序列所有位置。具体而言,模型对输入序列的每个位置初始化向量表示 \( h0 \),随后通过自注意力机制聚合全局信息,并经循环转换函数迭代更新表示至 \( h t \)(\( t \) 为时间步)。这种"并行-时间递归"结构保留了 Transformer 的并行训练优势------所有位置在每个时间步同步更新,而非 RNN 的串行处理------同时通过参数共享引入递归归纳偏置,使模型能学习跨步骤的依赖关系。实验表明,该机制在逻辑推理、字符串复制等组合任务上的表现显著优于标准 Transformer,因其更符合人类解决结构化问题的迭代思维模式。
(二)自适应计算时间机制:动态资源分配与效率优化
为解决固定计算深度的局限性,UT 引入自适应计算时间(Adaptive Computation Time, ACT) 机制,允许模型为每个位置动态决定迭代步骤数。通过在每个时间步计算"停止概率",模型可自主判断是否继续细化当前位置的表示:对于简单或明确的符号(如常见词汇),较早停止以节省计算;对于模糊或复杂的符号(如歧义单词"bank"),分配更多步骤整合上下文信息。这种机制不仅提升了计算效率,还增强了模型对输入复杂度的适应性,例如在心算任务中,UT 会为多位数运算分配更多迭代步骤,而对个位数运算快速收敛。
(三)图灵完备性与泛化能力:理论突破与任务验证
在特定假设下(如无限内存与时间步),UT 通过递归结构与动态停止机制被证明具备图灵完备性 ------这是标准 Transformer 无法实现的理论特性,使其能够模拟任意算法流程。实验层面,UT 在多项任务中展现出强泛化能力:在 LAMBADA 语言建模任务上实现当时最先进性能,在 WMT 14 英德机器翻译数据集上较 Transformer 提升 0.9 BLEU 值,在 bAbI 推理任务准确率上超越 LSTM 和 Transformer 基线。尤其在长序列泛化测试中,当输入长度超过训练分布时,UT 仍能保持稳定性能,而标准 Transformer 则因缺乏递归偏置出现显著精度下降。
(四)传统 Transformer 与 Universal Transformer 的架构差异
|------------|---------------------|---------------------------|
| 对比维度 | 传统 Transformer | Universal Transformer |
| 计算结构 | 固定深度的前馈层堆叠(不同层参数独立) | 循环参数共享的时间步迭代(相同转换函数) |
| 计算资源分配 | 所有位置固定层数(如 6 层编码器) | 动态每位置停止(步骤数自适应输入复杂度) |
| 归纳偏置 | 并行化与全局感受野 | 并行化+循环递归偏置 |
| 图灵完备性 | 非图灵完备 | 特定假设下图灵完备 |
| 典型优势任务 | 大规模语言建模、翻译(固定复杂度输入) | 算法推理、长序列泛化、逻辑任务 |
核心创新总结 :Universal Transformer 通过"并行时间递归结构"融合 Transformer 并行性与 RNN 递归能力,"自适应计算时间"实现动态资源分配,"图灵完备性"拓展通用计算边界,三者共同解决了标准 Transformer 在结构化任务与长序列泛化中的固有缺陷,为后续动态计算模型(如自适应注意力、混合专家架构)奠定了理论基础。
UT 的理论突破不仅体现在架构设计上,更通过实验验证了其在算法任务与语言理解中的优越性。例如,在复制字符串任务中,UT 能通过动态步骤数准确处理远超训练长度的序列;在逻辑推理任务中,递归更新机制使其能模拟"条件判断-结论推导"的迭代过程。这些特性使 UT 成为连接深度学习与符号推理的重要桥梁,为复杂认知任务的建模提供了新范式。本文将详细讲解Universal Transformer(UT)模型的数学原理及Python代码完整实现。
二、Universal Transformer(UT)模型的数学原理
(一)符号定义(与代码变量对应)
为统一推导逻辑,先定义核心符号及代码映射关系,避免歧义:
| 数学符号 | 含义 | 代码对应变量 |
|---|---|---|
| B | 批大小(batch size) | batch_size(如input_ids.shape[0]) |
| L | 序列长度(sequence length) | seq_len(如input_ids.shape[1]) |
| D | 模型维度(d_model) |
d_model(默认 256) |
| H | 注意力头数(num_heads) |
num_heads(默认 4) |
| 单个注意力头的维度 | 代码中d_model // num_heads |
|
| t | 时间步(迭代步数,ACT 机制的核心变量) | t(循环变量,如for t in range(max_steps)) |
| θ | ACT 停止阈值(累积停止信号需≥此值才停止) | halt_threshold(默认 0.9) |
 |
第i个位置、第t个时间步的隐藏状态 | current_state[:, i, :] |
 |
第i个位置、第t个时间步的停止概率 | halt_prob[:, i] |
 |
第i个位置、第t个时间步的累积停止信号 | cumulative_halt[:, i] |
 |
第i个位置、第t个时间步的活跃掩码(1 = 活跃,0 = 停止) | active_mask[:, i] |
 |
Q/K/V 线性投影矩阵 | w_q, w_k, w_v(nn.Linear) |
 |
多头注意力输出投影矩阵 | w_o(nn.Linear) |
| σ(⋅) | Sigmoid 激活函数(输出∈0,1,用于 ACT 停止概率) | nn.Sigmoid() |
| softmax(⋅) | Softmax 函数(按最后一维归一化,用于注意力权重) | F.softmax() |
| LayerNorm(⋅) | 层归一化(稳定训练,加速收敛) | nn.LayerNorm(d_model) |
(二)核心模块数学推导
模块 1:多头自注意力(Multi-Head Attention)
代码中MultiHeadAttention类实现该机制,核心是 "拆分头→并行计算缩放点积→合并头",捕捉多维度序列依赖。
1.1 基础:缩放点积注意力(Single-Head)
作用 :通过查询(Q)、键(K)的相似度计算注意力权重,加权求和值(V)得到注意力输出。推导步骤:
-
Q/K/V 线性投影 将输入隐藏状态
 通过线性层映射为 Q、K、V(维度不变,转换特征空间):
通过线性层映射为 Q、K、V(维度不变,转换特征空间): 其中⋅表示批量矩阵乘法 (适配B×L×D的三维张量,对每个样本独立计算),对应代码中
其中⋅表示批量矩阵乘法 (适配B×L×D的三维张量,对每个样本独立计算),对应代码中self.w_q(q)等操作。 -
注意力分数计算(缩放) 用 Q 与 K 的点积衡量位置相关性,除以
 避免维度增大导致分数过大,进而引发 Softmax 梯度消失:
避免维度增大导致分数过大,进而引发 Softmax 梯度消失:
- 维度变化:B×L×D⋅B×D×L→B×L×L(每个位置对所有位置的分数);
- 代码对应:
torch.matmul(q, k.transpose(-2, -1)) / self.scale(self.scale = sqrt(d_k))。
-
注意力掩码(Mask) 对无效位置(如 PAD)的分数设为
 ,确保 Softmax 后权重趋近于 0,不影响有效位置:
,确保 Softmax 后权重趋近于 0,不影响有效位置: 其中
其中 是掩码矩阵(0 = 无效,1 = 有效),⊗表示逐元素乘法,对应代码中
是掩码矩阵(0 = 无效,1 = 有效),⊗表示逐元素乘法,对应代码中attn_scores.masked_fill(attn_mask == 0, -1e9)。 -
注意力权重与输出 对分数 Softmax 归一化得到权重,加权求和 V 得到单头注意力输出:

- 权重
 (每行和为 1);
(每行和为 1); - 输出
 ,对应代码中
,对应代码中torch.matmul(attn_weights, v)。
- 权重
1.2 多头扩展(Multi-Head)
作用 :拆分注意力头并行计算,捕捉多维度依赖(如语法、语义不同层面)。推导步骤:
-
拆分多头 将 Q、K、V 按头数H拆分,每个头维度为
,通过
view和transpose调整维度: 代码对应:
代码对应:q = self.w_q(q).view(batch_size, -1, self.num_heads, self.d_k).transpose(1, 2)(先 reshape 为B×L×H× -
单头并行计算 对每个头独立执行 1.1 节的缩放点积注意力:
 其中
其中 是第h个头的 Q/K/V(h=1,2,...,H),除以H平衡多头输出的方差,对应代码中多头循环计算(因
是第h个头的 Q/K/V(h=1,2,...,H),除以H平衡多头输出的方差,对应代码中多头循环计算(因view后并行,代码未显式循环,而是通过张量维度自动并行)。 -
合并多头与输出投影 将H个单头输出拼接,通过线性层Wo投影回D维:

- 拼接维度变化:B×H×L×
- 代码对应:
output = output.transpose(1, 2).contiguous().view(batch_size, -1, self.d_model)(先转置回B×L×H×self.w_o(output)投影。
- 拼接维度变化:B×H×L×
模块 2:UT 层状态更新(UniversalTransformerLayer)
代码中UniversalTransformerLayer实现 "自注意力 + 前馈网络 + 残差 + 层归一化" 的循环状态更新,是 UT 的基础计算单元。
2.1 层归一化(LayerNorm)
作用 :标准化隐藏状态,减少内部协变量偏移,稳定训练。公式 :对每个样本的每个位置,计算D维特征的均值和方差,再归一化 + 缩放平移: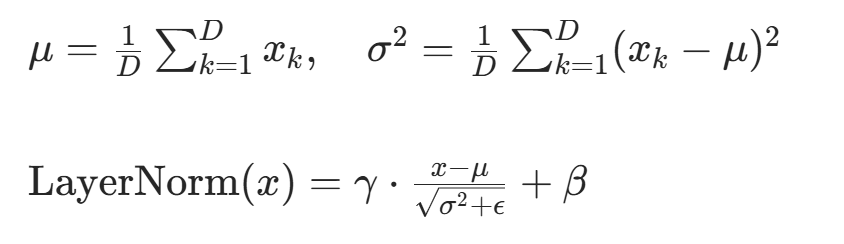
 (缩放参数)、
(缩放参数)、 (平移参数)为可学习参数,对应
(平移参数)为可学习参数,对应nn.LayerNorm的内部参数;- ϵ=1e−5(避免方差为 0),代码中
nn.LayerNorm(d_model)自动实现此逻辑。
2.2 残差连接与状态更新
推导步骤:
-
自注意力子层 输入x经多头注意力 + 残差连接 + 层归一化,更新为

- 残差连接:
 (输入加注意力输出,保留原始特征);
(输入加注意力输出,保留原始特征); - Dropout:随机失活部分神经元,防止过拟合,对应代码中
self.dropout(attn_output); - 代码对应:
x = self.norm1(x + self.dropout(attn_output))。
- 残差连接:
-
前馈网络(FFN)子层
- 前馈网络:代码中
self.transition = nn.Sequential(nn.Linear(D, 2D), nn.ReLU(), nn.Linear(2D, D))(隐藏层维度为2D,代码中d_model*2); - 代码对应:
x = self.norm2(x + self.dropout(transition_output))。
- 前馈网络:代码中
模块 3:自适应计算时间(ACT)机制
代码中ACTLayer实现动态步数分配,核心是 "停止概率→累积信号→活跃掩码更新",是 UT 的核心创新。
3.1 停止概率(Halt Probability)
作用:预测每个位置在当前时间步是否停止更新,输出∈0,1。
公式 :对当前状态 线性投影后用 Sigmoid 激活(确保输出在 0,1):
线性投影后用 Sigmoid 激活(确保输出在 0,1):
 是线性层参数,对应代码中
是线性层参数,对应代码中self.halt_proj = nn.Sequential(nn.Linear(d_model, 1), nn.Sigmoid());- 代码对应:
halt_prob = self.halt_proj(current_state).squeeze(-1)(squeeze 去除最后一维,得到B×L的停止概率)。
3.2 有效停止概率与累积信号
作用 :仅活跃位置 的停止概率参与累积,避免停止位置重复计算。公式:
的停止概率参与累积,避免停止位置重复计算。公式:
-
有效停止概率 :
 其中
其中 是当前活跃掩码(1 = 活跃,0 = 停止),对应代码中
是当前活跃掩码(1 = 活跃,0 = 停止),对应代码中effective_halt = halt_prob * active_mask。 -
累积停止信号 :迭代累积有效概率,当
 时停止:
时停止:
- 初始值
 (代码中
(代码中cumulative_halt = torch.zeros(...)); - 代码对应:
cumulative_halt += effective_halt。
- 初始值
3.3 活跃掩码更新
作用:标记停止位置,后续时间步不再更新。
公式 :用指示函数I(⋅)(条件为真返回 1,否则返回 0)更新掩码:
- 含义:若
 (累积信号达标),则
(累积信号达标),则 (停止);否则保持
(停止);否则保持 (继续活跃);
(继续活跃); - 代码对应:
newly_halted = (cumulative_halt >= self.halt_threshold) & active_mask.bool(),active_mask = active_mask.masked_fill(newly_halted, 0)。
3.4 剩余概率(防止过冲)
作用 :确保累积信号 最终收敛到 1(避免超过 1 导致权重异常)。
最终收敛到 1(避免超过 1 导致权重异常)。
公式 :
- 当位置刚停止时(
 但
但 ),用
),用 加权状态更新,确保
加权状态更新,确保 ;
; - 代码对应:
remaining = 1 - cumulative_halt + effective_halt,update_weight根据活跃掩码选择effective_halt或remaining。
3.5 ACT 状态更新
公式:活跃位置用新状态更新,停止位置保留原状态:
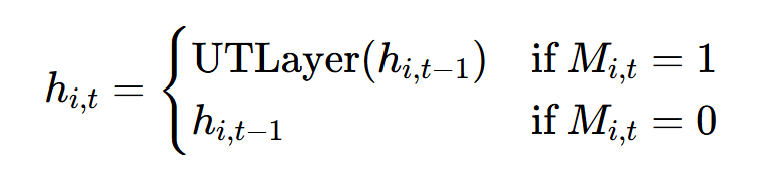
- UTLayer(⋅)是2.2节的UT层状态更新函数;
- 代码对应:
current_state = torch.where(active_mask.bool().unsqueeze(-1), updated_state, current_state)。
模块4:位置-时间二维嵌入
代码中PositionalTimeEmbedding类实现"空间位置+时间步"的联合编码,解决循环歧义。
4.1 位置嵌入(固定正弦余弦)
作用:注入序列顺序信息,支持长序列外推(无需重新训练即可处理长于训练长度的序列)。
公式:对位置i(1≤i≤L),按维度奇偶性分别用正弦、余弦编码:

- k是维度索引(0≤k<D/2),
 是位置i的嵌入向量;
是位置i的嵌入向量; - 代码对应:
pos_emb[:, 0, 0::2] = torch.sin(position * div_term),pos_emb[:, 0, 1::2] = torch.cos(position * div_term)(div_term = exp(2k/D * (-log(10000))))。
4.2 时间嵌入(可学习)
作用 :标记迭代时间步,让模型区分不同时间步的同一位置状态。公式 :为每个时间步t 分配可学习向量:
分配可学习向量:
其中 是可学习嵌入矩阵(对应代码中
是可学习嵌入矩阵(对应代码中self.time_embedding = nn.Embedding(max_time, d_model)),Tmax是最大时间步(代码中max_time_steps=5)。
4.3 二维嵌入融合
作用:合并位置与时间信息,注入到词嵌入中。代码支持两种融合方式:
-
加法融合(Add):计算高效,适合D≥256:

其中
 是词嵌入(代码中
是词嵌入(代码中self.embedding(input_ids)),对应代码中combined_enc = pos_enc + time_enc。 -
拼接融合(Concat):保留更多信息,适合D≤128:

其中
 是投影矩阵(代码中
是投影矩阵(代码中self.proj),将拼接后的2D维向量压缩回D维,对应代码中combined_enc = torch.cat([pos_enc, time_enc], dim=-1)再经过self.proj。
模块5:ACT损失函数(ACTLoss)
代码中ACTLoss类实现"预测损失+计算效率正则",平衡模型精度与计算成本。
5.1 预测损失(交叉熵)
作用 :优化模型对答案的预测精度(适用于bAbI问答等分类任务)。公式:对批样本B,计算预测概率与真实标签的交叉熵:

 :样本b的真实标签(独热编码,c为类别索引);
:样本b的真实标签(独热编码,c为类别索引); :模型预测类别c的概率,
:模型预测类别c的概率, 是预测头输出(代码中
是预测头输出(代码中self.predict_head(cls_output));- 代码对应:
self.ce_loss(logits, labels)(nn.CrossEntropyLoss自动实现Softmax和交叉熵)。
5.2 ACT正则项(惩罚过度迭代)
作用 :避免模型为简单位置分配过多计算步数,降低推理成本。公式:
-
单个位置的期望步数:基于停止概率计算位置i的平均迭代步数:

-
全局期望步数:对所有有效位置(非PAD)求平均:

其中
 表示位置i为有效token(非PAD),对应代码中
表示位置i为有效token(非PAD),对应代码中attention_mask。 -
正则项 :用惩罚系数λ(代码中
ponder_penalty=0.001)控制强度:
5.3 总损失
公式:预测损失与正则项之和,兼顾精度与效率:

代码对应:total_loss = ce_loss + act_reg。
(三)关键模块协同关系
上述数学公式在代码中形成闭环:
- 输入编码 :词嵌入+位置-时间嵌入→
 (模块4);
(模块4); - 循环更新 :UT层状态更新(模块2)+ ACT动态步数(模块3)→
 ;
; - 预测损失 :基于
 (最终时间步状态)计算交叉熵+ACT正则(模块5);
(最终时间步状态)计算交叉熵+ACT正则(模块5); - 优化 :反向传播最小化
 ,更新模型参数(如
,更新模型参数(如 等)。
等)。
三、文本数据集
(一)可以运行以下Python代码获取
python
import random
import os
# -------------------------- 1. 固定词汇表(严格匹配LocalTokenizer,不可新增) --------------------------
PEOPLE = ["Mary", "John", "Sandra"] # 人物
PLACES = ["garden", "bathroom", "hallway", "kitchen", "bedroom", "living room"] # 地点
ITEMS = ["football", "book", "cup", "key", "ball", "toy"] # 物品
ACTIONS = {
# 动作模板:(动作字符串模板, 需填充的参数数量, 参数类型列表)
"move_person": ("{person} moved to the {place}.", 2, ["person", "place"]), # 人物移到某地
"go_person": ("{person} went to the {place}.", 2, ["person", "place"]), # 人物去某地
"pick_item": ("{person} picked up the {item}.", 2, ["person", "item"]), # 人物拿起物品
"take_item_place": ("{person} took the {item} to the {place}.", 3, ["person", "item", "place"]), # 人物带物品去某地
"put_item_place": ("{person} put the {item} in the {place}.", 3, ["person", "item", "place"]), # 人物放物品到某地
"negate_go": ("{person} did not go to the {place}.", 2, ["person", "place"]), # 人物没去某地
"negate_take": ("{person} did not take the {item}.", 2, ["person", "item"]), # 人物没拿物品
"multi_hop_item": ("The {item} was in the {place1}. {person} moved it to the {place2}.", 3,
["item", "place1", "person", "place2"]) # 物品多跳转移
}
# 问题模板(对应任务类型)
QUESTION_TEMPLATES = {
"where_person": ("Where is {person}?", "{place}"), # 单跳:人物位置→答案=地点
"where_item": ("Where is the {item}?", "{place}"), # 单跳:物品位置→答案=地点
"where_item_first": ("Where was the {item} first?", "{place1}"), # 多跳:物品初始位置→答案=初始地点
"who_took_item": ("Who took the {item}?", "{person}"), # 单跳:谁拿物品→答案=人物
"where_not_go": ("Where did {person} not go?", "{place}"), # 否定:人物没去的地方→答案=地点
"who_put_item": ("Who put the {item} in the {place}?", "{person}") # 单跳:谁放物品→答案=人物
}
# -------------------------- 2. 样本生成函数(5类任务,确保多样性) --------------------------
def generate_single_hop_person_place() -> tuple[str, str, str]:
"""任务1:单跳推理(人物→地点)"""
person = random.choice(PEOPLE)
place = random.choice(PLACES)
# 生成故事(二选一动作)
action = random.choice(["move_person", "go_person"])
story = ACTIONS[action][0].format(person=person, place=place)
# 生成问题和答案
q_template, a_template = QUESTION_TEMPLATES["where_person"]
question = q_template.format(person=person)
answer = a_template.format(place=place)
return story, question, answer
def generate_single_hop_item_place() -> tuple[str, str, str]:
"""任务2:单跳推理(物品→地点)"""
person = random.choice(PEOPLE)
item = random.choice(ITEMS)
place = random.choice(PLACES)
# 生成故事(带物品转移)
story = ACTIONS["take_item_place"][0].format(person=person, item=item, place=place)
# 生成问题和答案
q_template, a_template = QUESTION_TEMPLATES["where_item"]
question = q_template.format(item=item)
answer = a_template.format(place=place)
return story, question, answer
def generate_multi_hop_item() -> tuple[str, str, str]:
"""任务3:多跳推理(物品多跳转移)"""
item = random.choice(ITEMS)
place1 = random.choice(PLACES)
place2 = random.choice([p for p in PLACES if p != place1]) # 避免地点重复
person = random.choice(PEOPLE)
# 生成故事(2句:初始位置+转移)
story = ACTIONS["multi_hop_item"][0].format(item=item, place1=place1, person=person, place2=place2)
# 随机生成"当前位置"或"初始位置"问题
if random.random() < 0.5:
q_template, a_template = QUESTION_TEMPLATES["where_item"]
question = q_template.format(item=item)
answer = a_template.format(place=place2) # 答案=当前地点
else:
q_template, a_template = QUESTION_TEMPLATES["where_item_first"]
question = q_template.format(item=item)
answer = a_template.format(place1=place1) # 答案=初始地点
return story, question, answer
def generate_negative_action() -> tuple[str, str, str]:
"""任务4:否定句推理(人物未做的动作)"""
person = random.choice(PEOPLE)
# 随机选择"否定去某地"或"否定拿物品"
if random.random() < 0.5:
place_not = random.choice(PLACES)
place_go = random.choice([p for p in PLACES if p != place_not])
# 故事:否定句+肯定句
story = f"{ACTIONS['negate_go'][0].format(person=person, place=place_not)} He went to the {place_go}."
# 问题:问未去的地方
q_template, a_template = QUESTION_TEMPLATES["where_not_go"]
question = q_template.format(person=person)
answer = a_template.format(place=place_not)
else:
item_not = random.choice(ITEMS)
item_take = random.choice([i for i in ITEMS if i != item_not])
# 故事:否定句+肯定句
story = f"{ACTIONS['negate_take'][0].format(person=person, item=item_not)} He took the {item_take}."
# 问题:问未拿的物品(复用物品位置模板,适配答案)
question = f"What item did {person} not take?"
answer = item_not
return story, question, answer
def generate_item_belong() -> tuple[str, str, str]:
"""任务5:物品归属推理(谁拥有/操作物品)"""
person1 = random.choice(PEOPLE)
person2 = random.choice([p for p in PEOPLE if p != person1]) # 避免人物重复
item = random.choice(ITEMS)
place = random.choice(PLACES)
# 故事:两人动作对比
story = f"{person1} put the {item} in the {place}. {person2} went to the garden."
# 问题:谁放了物品
q_template, a_template = QUESTION_TEMPLATES["who_put_item"]
question = q_template.format(item=item, place=place)
answer = a_template.format(person=person1)
return story, question, answer
# -------------------------- 3. 批量生成10000条数据 --------------------------
def generate_large_dataset(
total_samples: int = 10000,
train_ratio: float = 0.9, # 9:1划分训练/测试
save_dir: str = ".",
train_filename: str = "babi_train.txt",
test_filename: str = "babi_test.txt"
):
# 1. 定义任务类型及比例(总占比100%)
task_config = [
(generate_single_hop_person_place, 0.3), # 30% 单跳人物-地点
(generate_single_hop_item_place, 0.2), # 20% 单跳物品-地点
(generate_multi_hop_item, 0.2), # 20% 多跳物品转移
(generate_negative_action, 0.15), # 15% 否定句推理
(generate_item_belong, 0.15) # 15% 物品归属推理
]
# 2. 计算各任务需生成的样本数量
task_counts = []
remaining = total_samples
for func, ratio in task_config[:-1]:
count = int(total_samples * ratio)
task_counts.append((func, count))
remaining -= count
task_counts.append((task_config[-1][0], remaining)) # 最后一个任务承接剩余样本
# 3. 生成所有样本
all_samples = []
print("开始生成10000条样本...")
for func, count in task_counts:
task_name = func.__name__.replace("generate_", "").replace("_", " ")
print(f"生成{task_name}样本:{count}条")
for _ in range(count):
story, question, answer = func()
all_samples.append((story, question, answer))
# 4. 打乱样本顺序(避免同类样本集中)
random.shuffle(all_samples)
# 5. 划分训练集和测试集
train_size = int(total_samples * train_ratio)
train_samples = all_samples[:train_size]
test_samples = all_samples[train_size:]
# 6. 保存训练集(严格用\t分隔,UTF-8编码)
train_path = os.path.join(save_dir, train_filename)
with open(train_path, "w", encoding="utf-8") as f:
for story, question, answer in train_samples:
f.write(f"{story}\t{question}\t{answer}\n")
# 7. 保存测试集
test_path = os.path.join(save_dir, test_filename)
with open(test_path, "w", encoding="utf-8") as f:
for story, question, answer in test_samples:
f.write(f"{story}\t{question}\t{answer}\n")
# 8. 验证生成结果
def count_valid_lines(path):
with open(path, "r", encoding="utf-8") as f:
return sum(1 for line in f if len(line.strip().split("\t")) == 3)
train_valid = count_valid_lines(train_path)
test_valid = count_valid_lines(test_path)
# 9. 打印生成报告
print("\n" + "=" * 50)
print("数据集生成完成!")
print(f"总样本数:{len(all_samples)}条")
print(f"训练集:{train_path} → {len(train_samples)}条(有效:{train_valid}条)")
print(f"测试集:{test_path} → {len(test_samples)}条(有效:{test_valid}条)")
print(f"任务类型分布:")
print(f" - 单跳人物-地点:30%(约3000条)")
print(f" - 单跳物品-地点:20%(约2000条)")
print(f" - 多跳物品转移:20%(约2000条)")
print(f" - 否定句推理:15%(约1500条)")
print(f" - 物品归属推理:15%(约1500条)")
print("=" * 50)
# -------------------------- 4. 执行生成(直接运行即可) --------------------------
if __name__ == "__main__":
# 生成10000条样本(9000训练+1000测试)
generate_large_dataset(
total_samples=10000,
train_ratio=0.9,
save_dir=".", # 保存到当前目录
train_filename="babi_train.txt",
test_filename="babi_test.txt"
)(二)也可以使用下面的问答数据集
python
Sandra went to the living room. Where is Sandra? living room
John took the book to the bedroom. Where is the book? bedroom
John took the cup to the kitchen. Where is the cup? kitchen
Mary went to the bathroom. Where is Mary? bathroom
John did not take the toy. He took the key. What item did John not take? toy
The key was in the garden. Sandra moved it to the hallway. Where was the key first? garden
The football was in the garden. Sandra moved it to the living room. Where is the football? living room
Sandra put the key in the bathroom. Mary went to the garden. Who put the key in the bathroom? Sandra
John took the ball to the living room. Where is the ball? living room
Mary took the cup to the living room. Where is the cup? living room
Mary went to the garden. Where is Mary? garden
Mary did not go to the bathroom. He went to the garden. Where did Mary not go? bathroom
Sandra moved to the living room. Where is Sandra? living room
Mary did not go to the bedroom. He went to the hallway. Where did Mary not go? bedroom
The key was in the garden. Sandra moved it to the kitchen. Where is the key? kitchen
John took the key to the garden. Where is the key? garden
John put the football in the hallway. Sandra went to the garden. Who put the football in the hallway? John
Sandra moved to the hallway. Where is Sandra? hallway
John took the book to the garden. Where is the book? garden
John took the football to the bathroom. Where is the football? bathroom
Sandra took the football to the bedroom. Where is the football? bedroom
Mary moved to the bedroom. Where is Mary? bedroom
The key was in the bedroom. Sandra moved it to the hallway. Where was the key first? bedroom
Sandra put the ball in the bathroom. Mary went to the garden. Who put the ball in the bathroom? Sandra
John went to the bathroom. Where is John? bathroom
The book was in the kitchen. Sandra moved it to the bathroom. Where is the book? bathroom
Mary did not take the cup. He took the football. What item did Mary not take? cup
The toy was in the living room. Mary moved it to the bedroom. Where is the toy? bedroom
Sandra moved to the bathroom. Where is Sandra? bathroom
The football was in the bedroom. Mary moved it to the garden. Where was the football first? bedroom
John took the key to the hallway. Where is the key? hallway
Sandra took the key to the hallway. Where is the key? hallway
Mary took the book to the bathroom. Where is the book? bathroom
Mary took the ball to the hallway. Where is the ball? hallway
Sandra did not take the book. He took the cup. What item did Sandra not take? book
Sandra moved to the kitchen. Where is Sandra? kitchen
John put the key in the kitchen. Mary went to the garden. Who put the key in the kitchen? John
Sandra took the ball to the living room. Where is the ball? living room
John took the football to the living room. Where is the football? living room
Mary did not take the cup. He took the book. What item did Mary not take? cup
Sandra went to the kitchen. Where is Sandra? kitchen
John moved to the bedroom. Where is John? bedroom
John did not take the toy. He took the football. What item did John not take? toy
John took the toy to the hallway. Where is the toy? hallway
Mary moved to the kitchen. Where is Mary? kitchen
Mary took the cup to the kitchen. Where is the cup? kitchen
Mary took the cup to the garden. Where is the cup? garden
John did not go to the living room. He went to the kitchen. Where did John not go? living room
Sandra moved to the hallway. Where is Sandra? hallway
John moved to the bathroom. Where is John? bathroom
Mary went to the garden. Where is Mary? garden
Sandra moved to the garden. Where is Sandra? garden
Sandra put the toy in the kitchen. John went to the garden. Who put the toy in the kitchen? Sandra
Mary moved to the garden. Where is Mary? garden
John put the book in the living room. Sandra went to the garden. Who put the book in the living room? John
Mary did not go to the kitchen. He went to the hallway. Where did Mary not go? kitchen
Sandra went to the bedroom. Where is Sandra? bedroom
Mary did not go to the kitchen. He went to the bedroom. Where did Mary not go? kitchen
Mary went to the bedroom. Where is Mary? bedroom
The football was in the bathroom. John moved it to the hallway. Where was the football first? bathroom
The cup was in the bathroom. Mary moved it to the bedroom. Where was the cup first? bathroom
Mary took the key to the bedroom. Where is the key? bedroom
Sandra moved to the bedroom. Where is Sandra? bedroom
The key was in the hallway. Sandra moved it to the bathroom. Where was the key first? hallway
Sandra went to the garden. Where is Sandra? garden
Mary took the toy to the living room. Where is the toy? living room
The cup was in the bathroom. John moved it to the hallway. Where was the cup first? bathroom
Sandra took the football to the bedroom. Where is the football? bedroom
Mary took the book to the garden. Where is the book? garden
The book was in the living room. John moved it to the hallway. Where was the book first? living room
John moved to the kitchen. Where is John? kitchen
Mary put the book in the living room. Sandra went to the garden. Who put the book in the living room? Mary
The football was in the bedroom. John moved it to the hallway. Where was the football first? bedroom
Sandra went to the bedroom. Where is Sandra? bedroom
Sandra took the book to the garden. Where is the book? garden
The cup was in the bathroom. John moved it to the living room. Where is the cup? living room
John went to the garden. Where is John? garden
Sandra put the cup in the bedroom. Mary went to the garden. Who put the cup in the bedroom? Sandra
Mary took the football to the kitchen. Where is the football? kitchen
Sandra put the ball in the hallway. John went to the garden. Who put the ball in the hallway? Sandra
John did not go to the bedroom. He went to the hallway. Where did John not go? bedroom
Mary put the cup in the garden. John went to the garden. Who put the cup in the garden? Mary
John moved to the kitchen. Where is John? kitchen
Mary put the ball in the bedroom. John went to the garden. Who put the ball in the bedroom? Mary
John took the toy to the garden. Where is the toy? garden
The toy was in the bathroom. Mary moved it to the living room. Where is the toy? living room
Sandra put the toy in the garden. John went to the garden. Who put the toy in the garden? Sandra
The key was in the bedroom. John moved it to the kitchen. Where was the key first? bedroom
Mary took the toy to the bedroom. Where is the toy? bedroom
Sandra went to the hallway. Where is Sandra? hallway
John went to the kitchen. Where is John? kitchen
Sandra put the toy in the hallway. Mary went to the garden. Who put the toy in the hallway? Sandra
Mary did not go to the hallway. He went to the bathroom. Where did Mary not go? hallway
John did not go to the hallway. He went to the bedroom. Where did John not go? hallway
Mary did not go to the living room. He went to the bathroom. Where did Mary not go? living room
Mary went to the bedroom. Where is Mary? bedroom
Mary moved to the hallway. Where is Mary? hallway
John took the football to the bedroom. Where is the football? bedroom
Sandra did not take the key. He took the football. What item did Sandra not take? key
John did not go to the bedroom. He went to the living room. Where did John not go? bedroom
Mary put the ball in the bathroom. Sandra went to the garden. Who put the ball in the bathroom? Mary
Sandra did not go to the living room. He went to the garden. Where did Sandra not go? living room
Mary put the football in the hallway. John went to the garden. Who put the football in the hallway? Mary
The key was in the garden. John moved it to the bathroom. Where was the key first? garden
Sandra did not take the key. He took the toy. What item did Sandra not take? key
Sandra went to the kitchen. Where is Sandra? kitchen
Mary put the football in the bathroom. Sandra went to the garden. Who put the football in the bathroom? Mary
John moved to the hallway. Where is John? hallway
Mary moved to the hallway. Where is Mary? hallway
Sandra moved to the bathroom. Where is Sandra? bathroom
The book was in the garden. Mary moved it to the kitchen. Where was the book first? garden
Sandra moved to the living room. Where is Sandra? living room
Sandra went to the kitchen. Where is Sandra? kitchen
Mary took the book to the hallway. Where is the book? hallway
Sandra went to the bathroom. Where is Sandra? bathroom
John went to the living room. Where is John? living room
The key was in the garden. John moved it to the hallway. Where was the key first? garden
Mary went to the living room. Where is Mary? living room
Mary went to the bathroom. Where is Mary? bathroom
Mary went to the bathroom. Where is Mary? bathroom
Sandra took the toy to the bedroom. Where is the toy? bedroom
John moved to the hallway. Where is John? hallway
The football was in the hallway. Mary moved it to the garden. Where is the football? garden
The toy was in the hallway. Sandra moved it to the bathroom. Where is the toy? bathroom四、Universal Transformer(UT)模型的Python代码完整实现
python
import os
import torch
import torch.nn as nn
import torch.nn.functional as F
import math
import numpy as np
from torch.utils.data import Dataset, DataLoader
from torch.optim import AdamW
from tqdm import tqdm
from torch.utils.tensorboard import SummaryWriter
import matplotlib.pyplot as plt
import seaborn as sns
from matplotlib.animation import FuncAnimation
import re # 用于基础分词
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
# -------------------------- 自定义分词器 --------------------------
class LocalTokenizer:
"""
基础分词器:支持文本→ID、ID→文本、词汇表管理
适配bAbI数据集场景(英文短句、简单词汇)
"""
def __init__(self):
# 1. 基础词汇表(覆盖bAbI常见词汇,可根据数据扩展)
self.vocab = {
"[PAD]": 0, # 填充token
"[CLS]": 1, # 句子起始token
"[SEP]": 2, # 句子分隔token
"[UNK]": 3, # 未知词token
# bAbI常见词汇(根据实际数据补充)
"mary": 4, "john": 5, "sandra": 6, "football": 7, "garden": 8, "bathroom": 9,
"hallway": 10, "kitchen": 11, "bedroom": 12, "moved": 13, "went": 14, "picked": 15,
"up": 16, "to": 17, "the": 18, "is": 19, "where": 20, "what": 21, "who": 22,
"did": 23, "took": 24, "put": 25, "in": 26, "on": 27, "under": 28, "and": 29, "or": 30
}
# 反向词汇表(ID→token)
self.id_to_token = {v: k for k, v in self.vocab.items()}
# 关键属性
self.pad_token = "[PAD]"
self.pad_token_id = self.vocab[self.pad_token]
self.cls_token = "[CLS]"
self.cls_token_id = self.vocab[self.cls_token]
self.sep_token = "[SEP]"
self.sep_token_id = self.vocab[self.sep_token]
self.unk_token = "[UNK]"
self.unk_token_id = self.vocab[self.unk_token]
self.vocab_size = len(self.vocab)
def _basic_tokenize(self, text: str) -> list[str]:
"""基础分词逻辑:小写化→去除标点→按空格分割"""
# 1. 小写化(统一大小写)
text = text.lower()
# 2. 去除标点(保留问号,因为bAbI问题含问号)
text = re.sub(r"[^\w\s?]", "", text) # 仅保留字母、数字、空格、问号
# 3. 按空格分割,过滤空字符串
tokens = [t for t in text.split() if t.strip()]
return tokens
def encode(self, text: str, max_length: int = 64, truncation: bool = True) -> list[int]:
"""文本→ID:支持截断和补全"""
# 1. 基础分词
tokens = self._basic_tokenize(text)
# 2. 添加[CLS]和[SEP](与原代码格式对齐)
tokens = [self.cls_token] + tokens + [self.sep_token]
# 3. 截断(超过max_length时)
if truncation and len(tokens) > max_length:
tokens = tokens[:max_length - 1] + [self.sep_token] # 确保最后一个是[SEP]
# 4. 转换为ID(未知词用[UNK])
input_ids = [self.vocab.get(token, self.unk_token_id) for token in tokens]
# 5. 补全(不足max_length时用[PAD])
if len(input_ids) < max_length:
input_ids += [self.pad_token_id] * (max_length - len(input_ids))
return input_ids
def decode(self, input_ids: list[int], skip_special_tokens: bool = True) -> str:
"""ID→文本:支持跳过特殊token"""
# 1. 转换为token
tokens = [self.id_to_token.get(id, self.unk_token) for id in input_ids]
# 2. 跳过特殊token(可选)
if skip_special_tokens:
special_tokens = {self.cls_token, self.sep_token, self.pad_token}
tokens = [t for t in tokens if t not in special_tokens]
# 3. 拼接为文本
return " ".join(tokens)
def convert_tokens_to_ids(self, tokens: list[str]) -> list[int]:
"""token列表→ID列表"""
return [self.vocab.get(token, self.unk_token_id) for token in tokens]
def __call__(self, text: str, return_tensors: str = None, padding: str = None,
truncation: bool = True, max_length: int = 64) -> dict:
"""模拟Hugging Face Tokenizer调用接口,返回字典格式结果"""
# 1. 编码文本
input_ids = self.encode(text, max_length=max_length, truncation=truncation)
# 2. 生成attention_mask(1=有效token,0=PAD)
attention_mask = [1 if id != self.pad_token_id else 0 for id in input_ids]
# 3. 转换为张量(若指定return_tensors="pt")
if return_tensors == "pt":
input_ids = torch.tensor([input_ids], dtype=torch.long)
attention_mask = torch.tensor([attention_mask], dtype=torch.long)
# 4. 返回结果(与原代码接口对齐)
return {
"input_ids": input_ids,
"attention_mask": attention_mask
}
# 初始化分词器
def init_tokenizer() -> LocalTokenizer:
return LocalTokenizer()
tokenizer = init_tokenizer() # 初始化
# -------------------------- 1. 手动实现MultiHeadAttention --------------------------
class MultiHeadAttention(nn.Module):
def __init__(self, d_model=256, num_heads=4, dropout=0.1):
super().__init__()
assert d_model % num_heads == 0, "d_model必须能被num_heads整除"
self.d_model = d_model
self.num_heads = num_heads
self.d_k = d_model // num_heads
self.w_q = nn.Linear(d_model, d_model)
self.w_k = nn.Linear(d_model, d_model)
self.w_v = nn.Linear(d_model, d_model)
self.w_o = nn.Linear(d_model, d_model)
self.dropout = nn.Dropout(dropout)
self.scale = torch.sqrt(torch.FloatTensor([self.d_k]))
def forward(self, q, k, v, attn_mask=None):
batch_size = q.shape[0]
q = self.w_q(q).view(batch_size, -1, self.num_heads, self.d_k).transpose(1, 2)
k = self.w_k(k).view(batch_size, -1, self.num_heads, self.d_k).transpose(1, 2)
v = self.w_v(v).view(batch_size, -1, self.num_heads, self.d_k).transpose(1, 2)
attn_scores = torch.matmul(q, k.transpose(-2, -1)) / self.scale.to(q.device)
if attn_mask is not None:
if attn_mask.dim() == 3:
attn_mask = attn_mask.unsqueeze(1)
attn_scores = attn_scores.masked_fill(attn_mask == 0, -1e9)
attn_weights = F.softmax(attn_scores, dim=-1)
attn_weights = self.dropout(attn_weights)
output = torch.matmul(attn_weights, v)
output = output.transpose(1, 2).contiguous().view(batch_size, -1, self.d_model)
output = self.w_o(output)
return output, attn_weights
# -------------------------- 2. 模型组件 --------------------------
class UniversalTransformerLayer(nn.Module):
def __init__(self, d_model=256, num_heads=4, transition_type='fc', dropout=0.1):
super().__init__()
self.self_attn = MultiHeadAttention(d_model=d_model, num_heads=num_heads, dropout=dropout)
self.norm1 = nn.LayerNorm(d_model)
self.dropout = nn.Dropout(dropout)
self.transition = nn.Sequential(
nn.Linear(d_model, d_model * 2),
nn.ReLU(),
nn.Linear(d_model * 2, d_model)
)
self.norm2 = nn.LayerNorm(d_model)
def forward(self, x, mask=None):
attn_output, attn_weights = self.self_attn(x, x, x, attn_mask=mask)
x = self.norm1(x + self.dropout(attn_output))
transition_output = self.transition(x)
x = self.norm2(x + self.dropout(transition_output))
return x, attn_weights
def universal_transformer_forward(x, layer, max_steps=5, active_mask=None):
all_attn_weights = []
for t in range(max_steps):
if active_mask is not None:
x_active = x * active_mask.unsqueeze(-1)
x_update, attn_weights = layer(x_active)
x = x * (~active_mask.bool()).unsqueeze(-1) + x_update
else:
x, attn_weights = layer(x)
all_attn_weights.append(attn_weights)
if active_mask is not None and active_mask.sum() == 0:
break
while len(all_attn_weights) < max_steps:
fill_tensor = torch.zeros_like(all_attn_weights[0]) if all_attn_weights else torch.zeros(
x.shape[0], layer.self_attn.num_heads, x.shape[1], x.shape[1], device=x.device
)
all_attn_weights.append(fill_tensor)
return x, torch.stack(all_attn_weights, dim=0)
class ACTLayer(nn.Module):
def __init__(self, d_model=256, max_steps=5, halt_threshold=0.9, num_heads=4):
super().__init__()
self.max_steps = max_steps
self.halt_threshold = halt_threshold
self.halt_proj = nn.Sequential(
nn.Linear(d_model, 1),
nn.Sigmoid()
)
self.ut_layer = UniversalTransformerLayer(d_model=d_model, num_heads=num_heads)
def forward(self, initial_state):
batch_size, seq_len, d_model = initial_state.shape
current_state = initial_state
cumulative_halt = torch.zeros(batch_size, seq_len, device=initial_state.device)
active_mask = torch.ones(batch_size, seq_len, device=initial_state.device)
stop_probs = []
all_attn_weights = []
for t in range(self.max_steps):
halt_prob = self.halt_proj(current_state).squeeze(-1)
stop_probs.append(halt_prob)
effective_halt = halt_prob * active_mask
cumulative_halt += effective_halt
newly_halted = (cumulative_halt >= self.halt_threshold) & active_mask.bool()
active_mask = active_mask.masked_fill(newly_halted, 0)
updated_state, attn_weights = self.ut_layer(current_state)
all_attn_weights.append(attn_weights)
current_state = torch.where(
active_mask.bool().unsqueeze(-1),
updated_state,
current_state
)
if active_mask.sum() == 0:
break
stop_probs = torch.stack(stop_probs, dim=1)
if stop_probs.shape[1] < self.max_steps:
pad = torch.zeros(batch_size, self.max_steps - stop_probs.shape[1], seq_len, device=stop_probs.device)
stop_probs = torch.cat([stop_probs, pad], dim=1)
while len(all_attn_weights) < self.max_steps:
fill_tensor = torch.zeros_like(all_attn_weights[0]) if all_attn_weights else torch.zeros(
batch_size, self.ut_layer.self_attn.num_heads, seq_len, seq_len, device=initial_state.device
)
all_attn_weights.append(fill_tensor)
all_attn_weights = torch.stack(all_attn_weights, dim=0)
return current_state, stop_probs, active_mask, all_attn_weights
class PositionalTimeEmbedding(nn.Module):
def __init__(self, d_model=256, max_len=64, max_time=10, merge_mode='add'):
super().__init__()
self.d_model = d_model
self.merge_mode = merge_mode
position = torch.arange(max_len).unsqueeze(1)
div_term = torch.exp(torch.arange(0, d_model, 2) * (-math.log(10000.0) / d_model))
pos_emb = torch.zeros(max_len, 1, d_model)
pos_emb[:, 0, 0::2] = torch.sin(position * div_term)
pos_emb[:, 0, 1::2] = torch.cos(position * div_term)
self.register_buffer('pos_emb', pos_emb)
self.time_emb = nn.Embedding(max_time, d_model)
if merge_mode == 'concat':
self.proj = nn.Linear(2 * d_model, d_model)
def forward(self, x, time_step):
batch_size, seq_len = x.shape[:2]
pos_enc = self.pos_emb[:seq_len].expand(-1, batch_size, -1).transpose(0, 1)
time_enc = self.time_emb(torch.tensor(time_step, device=x.device))
time_enc = time_enc.unsqueeze(0).unsqueeze(0).expand(batch_size, seq_len, -1)
if self.merge_mode == 'add':
combined_enc = pos_enc + time_enc
else:
combined_enc = torch.cat([pos_enc, time_enc], dim=-1)
combined_enc = self.proj(combined_enc)
return x + combined_enc
# -------------------------- 3. 数据预处理(适配自定义分词器) --------------------------
def preprocess_text(context: str, question: str, tokenizer: LocalTokenizer, max_len=64) -> dict:
"""文本预处理:生成[CLS] 上下文 [SEP] 问题 [SEP]格式"""
input_text = f"{context} {question}" # 自定义分词器已自动添加[CLS]和[SEP]
inputs = tokenizer(
input_text,
return_tensors="pt",
padding="max_length",
truncation=True,
max_length=max_len
)
return {
"input_ids": inputs["input_ids"],
"attention_mask": inputs["attention_mask"]
}
def create_masks(input_ids: torch.Tensor, tokenizer: LocalTokenizer) -> tuple[torch.Tensor, torch.Tensor]:
"""生成填充掩码和时间步掩码"""
device = input_ids.device
padding_mask = (input_ids != tokenizer.pad_token_id).float().to(device)
time_mask = torch.ones(
(input_ids.shape[0], input_ids.shape[1], input_ids.shape[1]),
device=device
)
pad_mask = (input_ids == tokenizer.pad_token_id).unsqueeze(1).expand(-1, input_ids.shape[1], -1).to(device)
time_mask = time_mask.masked_fill(pad_mask, 0)
return padding_mask, time_mask
class BAbIDataset(Dataset):
def __init__(self, data_path: str, tokenizer: LocalTokenizer, max_len=64):
self.data = self._load_data(data_path)
self.tokenizer = tokenizer
self.max_len = max_len
def _load_data(self, data_path: str) -> list[tuple[str, str, str]]:
"""加载bAbI数据(每行格式:故事\t问题\t答案)"""
data = []
try:
with open(data_path, "r", encoding="utf-8") as f:
for line_num, line in enumerate(f, 1):
line = line.strip()
if not line:
continue
parts = line.split("\t")
if len(parts) != 3:
print(f"警告:第{line_num}行格式错误,跳过(需3个字段,实际{len(parts)}个)")
continue
context, question, answer = parts
data.append((context, question, answer))
except FileNotFoundError:
print(f"错误:未找到数据文件 {data_path},请检查路径!")
return data
def __len__(self) -> int:
return len(self.data)
def __getitem__(self, idx: int) -> dict:
context, question, answer = self.data[idx]
inputs = preprocess_text(context, question, self.tokenizer, self.max_len)
# 答案转ID(自定义分词器处理)
answer_tokens = self.tokenizer._basic_tokenize(answer)
# 取答案第一个token(简化处理,bAbI答案多为单个词)
answer_token = answer_tokens[0] if answer_tokens else self.tokenizer.unk_token
answer_id = self.tokenizer.vocab.get(answer_token, self.tokenizer.unk_token_id)
return {
"input_ids": inputs["input_ids"].squeeze(0), # [L]
"attention_mask": inputs["attention_mask"].squeeze(0), # [L]
"answer_id": torch.tensor(answer_id, dtype=torch.long) # 标量
}
def get_babi_dataloader(data_path: str, tokenizer: LocalTokenizer, max_len=64, batch_size=4,
shuffle=True) -> DataLoader:
dataset = BAbIDataset(data_path, tokenizer, max_len)
if len(dataset) == 0:
return None
return DataLoader(
dataset,
batch_size=batch_size,
shuffle=shuffle,
num_workers=0,
pin_memory=False,
drop_last=True
)
# 初始化DataLoader(需确保babi_train.txt在指定路径)
train_dataloader = get_babi_dataloader(
data_path="babi_train.txt", # 替换为你的本地数据路径
tokenizer=tokenizer,
max_len=64,
batch_size=4
)
# -------------------------- 4. 主模型与训练(保持CPU适配) --------------------------
class UniversalTransformer(nn.Module):
def __init__(
self,
vocab_size: int,
d_model=256,
num_heads=4,
max_len=64,
max_time_steps=5,
halt_threshold=0.9,
merge_mode='add',
dropout=0.1
):
super().__init__()
self.d_model = d_model
self.max_time_steps = max_time_steps
self.halt_threshold = halt_threshold
self.num_heads = num_heads
self.embedding = nn.Embedding(vocab_size, d_model)
self.embedding_dropout = nn.Dropout(dropout)
self.pos_time_emb = PositionalTimeEmbedding(
d_model=d_model,
max_len=max_len,
max_time=max_time_steps,
merge_mode=merge_mode
)
self.act_layer = ACTLayer(
d_model=d_model,
max_steps=max_time_steps,
halt_threshold=halt_threshold,
num_heads=num_heads
)
self.predict_head = nn.Linear(d_model, vocab_size)
def forward(self, input_ids: torch.Tensor) -> tuple[torch.Tensor, torch.Tensor, torch.Tensor, torch.Tensor]:
device = input_ids.device
batch_size, seq_len = input_ids.shape
x = self.embedding(input_ids)
x = self.pos_time_emb(x, time_step=0)
x = self.embedding_dropout(x)
x, stop_probs, active_mask, all_attn_weights = self.act_layer(x)
cls_output = x[:, 0, :]
logits = self.predict_head(cls_output)
return logits, stop_probs, active_mask, all_attn_weights
# 初始化模型(强制CPU)
vocab_size = tokenizer.vocab_size
device = torch.device("cpu")
model = UniversalTransformer(
vocab_size=vocab_size,
d_model=256,
num_heads=4,
max_len=64,
max_time_steps=5
).to(device)
class ACTLoss(nn.Module):
def __init__(self, ponder_penalty=0.001):
super().__init__()
self.ce_loss = nn.CrossEntropyLoss()
self.ponder_penalty = ponder_penalty
def forward(
self,
logits: torch.Tensor,
labels: torch.Tensor,
stop_probs: torch.Tensor,
attention_mask: torch.Tensor
) -> tuple[torch.Tensor, torch.Tensor, torch.Tensor]:
device = logits.device
batch_size, max_time, seq_len = stop_probs.shape
ce_loss = self.ce_loss(logits, labels)
time_steps = torch.arange(max_time, device=device).unsqueeze(0).unsqueeze(-1)
expected_steps_per_pos = (stop_probs * time_steps).sum(1)
valid_pos_count = attention_mask.sum()
if valid_pos_count == 0:
act_reg = torch.tensor(0.0, device=device)
else:
expected_steps = (expected_steps_per_pos * attention_mask).sum() / valid_pos_count
act_reg = self.ponder_penalty * expected_steps
total_loss = ce_loss + act_reg
return total_loss, ce_loss, act_reg
def train_ut_model(
model: UniversalTransformer,
train_dataloader: DataLoader,
tokenizer: LocalTokenizer,
num_epochs=5,
lr=3e-5,
weight_decay=1e-4,
ponder_penalty=0.001,
log_dir="runs/ut_babi_cpu_offline"
):
if train_dataloader is None:
print("无训练数据,终止训练!")
return
device = next(model.parameters()).device
criterion = ACTLoss(ponder_penalty=ponder_penalty)
optimizer = AdamW(model.parameters(), lr=lr, weight_decay=weight_decay, amsgrad=False)
writer = SummaryWriter(log_dir=log_dir)
model.train()
for epoch in range(num_epochs):
total_loss = 0.0
total_ce_loss = 0.0
total_act_reg = 0.0
total_avg_steps = 0.0
sample_count = 0
pbar = tqdm(train_dataloader, desc=f"Epoch {epoch + 1}/{num_epochs}", dynamic_ncols=False)
for batch in pbar:
input_ids = batch["input_ids"]
attention_mask = batch["attention_mask"]
labels = batch["answer_id"]
batch_size = input_ids.shape[0]
sample_count += batch_size
logits, stop_probs, active_mask, _ = model(input_ids)
loss, ce_loss, act_reg = criterion(logits, labels, stop_probs, attention_mask)
cumulative_halt = torch.cumsum(stop_probs, dim=1)
step_mask = (cumulative_halt >= model.halt_threshold).float()
steps_per_pos = torch.argmax(step_mask, dim=1)
steps_per_pos[step_mask.sum(1) == 0] = model.max_time_steps
valid_pos_count = attention_mask.sum()
if valid_pos_count > 0:
avg_steps_batch = (steps_per_pos * attention_mask).sum() / valid_pos_count
total_avg_steps += avg_steps_batch.item() * batch_size
optimizer.zero_grad()
loss.backward()
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=0.5)
optimizer.step()
total_loss += loss.item() * batch_size
total_ce_loss += ce_loss.item() * batch_size
total_act_reg += act_reg.item() * batch_size
pbar.set_postfix({
"loss": f"{loss.item():.4f}",
"ce_loss": f"{ce_loss.item():.4f}",
"avg_steps": f"{avg_steps_batch.item():.2f}" if valid_pos_count > 0 else "0.00"
})
avg_loss = total_loss / sample_count if sample_count > 0 else 0.0
avg_ce_loss = total_ce_loss / sample_count if sample_count > 0 else 0.0
avg_act_reg = total_act_reg / sample_count if sample_count > 0 else 0.0
avg_steps_epoch = total_avg_steps / sample_count if sample_count > 0 else 0.0
if (epoch + 1) % 2 == 0:
writer.add_scalar("Loss/Total_Loss", avg_loss, epoch)
writer.add_scalar("Loss/CE_Loss", avg_ce_loss, epoch)
writer.add_scalar("Stats/Avg_Computation_Steps", avg_steps_epoch, epoch)
print(f"\nEpoch {epoch + 1} 总结:")
print(f" 平均总损失: {avg_loss:.4f} | 平均CE损失: {avg_ce_loss:.4f}")
print(f" 平均计算步数: {avg_steps_epoch:.2f}\n")
torch.save(model.state_dict(), "universal_transformer_cpu_offline.pth")
writer.close()
print("CPU训练完成!模型保存为 universal_transformer_cpu_offline.pth")
# -------------------------- 5. 推理与可视化(适配自定义分词器) --------------------------
def infer_ut_model(
model: UniversalTransformer,
tokenizer: LocalTokenizer,
context: str,
question: str,
max_len=64,
device=torch.device("cpu")
) -> tuple[str, int, torch.Tensor]:
model.eval()
with torch.no_grad():
inputs = preprocess_text(context, question, tokenizer, max_len)
input_ids = inputs["input_ids"]
attention_mask = inputs["attention_mask"]
logits, stop_probs, active_mask, all_attn_weights = model(input_ids)
# 预测答案(自定义分词器解码)
pred_token_id = logits.argmax(dim=-1).item()
pred_answer = tokenizer.id_to_token.get(pred_token_id, tokenizer.unk_token)
# 过滤特殊token(若预测到[PAD]/[CLS]等,替换为未知)
if pred_answer in [tokenizer.pad_token, tokenizer.cls_token, tokenizer.sep_token]:
pred_answer = tokenizer.unk_token
# 计算平均步数
cumulative_halt = torch.cumsum(stop_probs, dim=1)
step_mask = (cumulative_halt >= model.halt_threshold).float()
steps_per_pos = torch.argmax(step_mask, dim=1)
steps_per_pos[step_mask.sum(1) == 0] = model.max_time_steps
valid_pos_count = attention_mask.sum()
avg_steps = (steps_per_pos * attention_mask).sum() / valid_pos_count if valid_pos_count > 0 else 0.0
all_attn_weights = all_attn_weights.squeeze(1)
return pred_answer, int(avg_steps.item()), all_attn_weights
def plot_attention_heatmap(
all_attn_weights: torch.Tensor,
input_ids: torch.Tensor,
tokenizer: LocalTokenizer,
time_step: int = 0,
head_idx: int = 0,
save_path: str = "attention_heatmap_cpu_offline.png"
):
T, num_heads, L, _ = all_attn_weights.shape
if time_step < 0 or time_step >= T:
print(f"时间步{time_step}无效,需在0~{T - 1}之间")
return
if head_idx < 0 or head_idx >= num_heads:
print(f"注意力头{head_idx}无效,需在0~{num_heads - 1}之间")
return
attn_weights = all_attn_weights[time_step, head_idx].numpy()
# 自定义分词器解码token
tokens = [tokenizer.id_to_token.get(id.item(), tokenizer.unk_token) for id in input_ids.squeeze(0)]
valid_idx = [i for i, token in enumerate(tokens) if token != tokenizer.pad_token]
if not valid_idx:
print("无有效token,无法绘制热力图")
return
attn_weights = attn_weights[valid_idx, :][:, valid_idx]
valid_tokens = [tokens[i] for i in valid_idx]
plt.figure(figsize=(8, 6))
sns.heatmap(
attn_weights,
xticklabels=valid_tokens,
yticklabels=valid_tokens,
cmap="viridis",
annot=False,
fmt=".2f",
cbar_kws={"label": "Attention Weight"},
linewidths=0.1
)
plt.title(f"Attention Heatmap (Time Step: {time_step + 1}, Head: {head_idx + 1})")
plt.xlabel("Key Tokens")
plt.ylabel("Query Tokens")
plt.xticks(rotation=45, ha="right")
plt.tight_layout()
plt.savefig(save_path, dpi=150, bbox_inches="tight")
plt.show()
plt.close()
print(f"注意力热力图已保存至 {save_path}")
def animate_act_steps(
model: UniversalTransformer,
tokenizer: LocalTokenizer,
context: str,
question: str,
max_len=64,
save_path: str = "act_steps_animation_cpu_offline.gif",
device=torch.device("cpu")
):
model.eval()
with torch.no_grad():
inputs = preprocess_text(context, question, tokenizer, max_len)
input_ids = inputs["input_ids"]
attention_mask = inputs["attention_mask"]
_, stop_probs, _, _ = model(input_ids)
cumulative_halt = torch.cumsum(stop_probs, dim=1)
step_mask = (cumulative_halt >= model.halt_threshold).float()
steps_per_pos = torch.argmax(step_mask, dim=1).squeeze(0).numpy()
steps_per_pos[step_mask.sum(1).squeeze(0) == 0] = model.max_time_steps
valid_idx = attention_mask.squeeze(0).numpy().nonzero()[0]
valid_steps = steps_per_pos[valid_idx]
# 自定义分词器解码token
valid_tokens = [tokenizer.id_to_token.get(id.item(), tokenizer.unk_token) for id in input_ids[0][valid_idx]]
if len(valid_tokens) == 0:
print("无有效token,无法生成动画")
return
fig, ax = plt.subplots(figsize=(10, 4))
ax.set_xlim(0, len(valid_tokens) - 1)
ax.set_ylim(0, model.max_time_steps + 1)
ax.set_xlabel("Token Position", fontsize=10)
ax.set_ylabel("Computation Steps", fontsize=10)
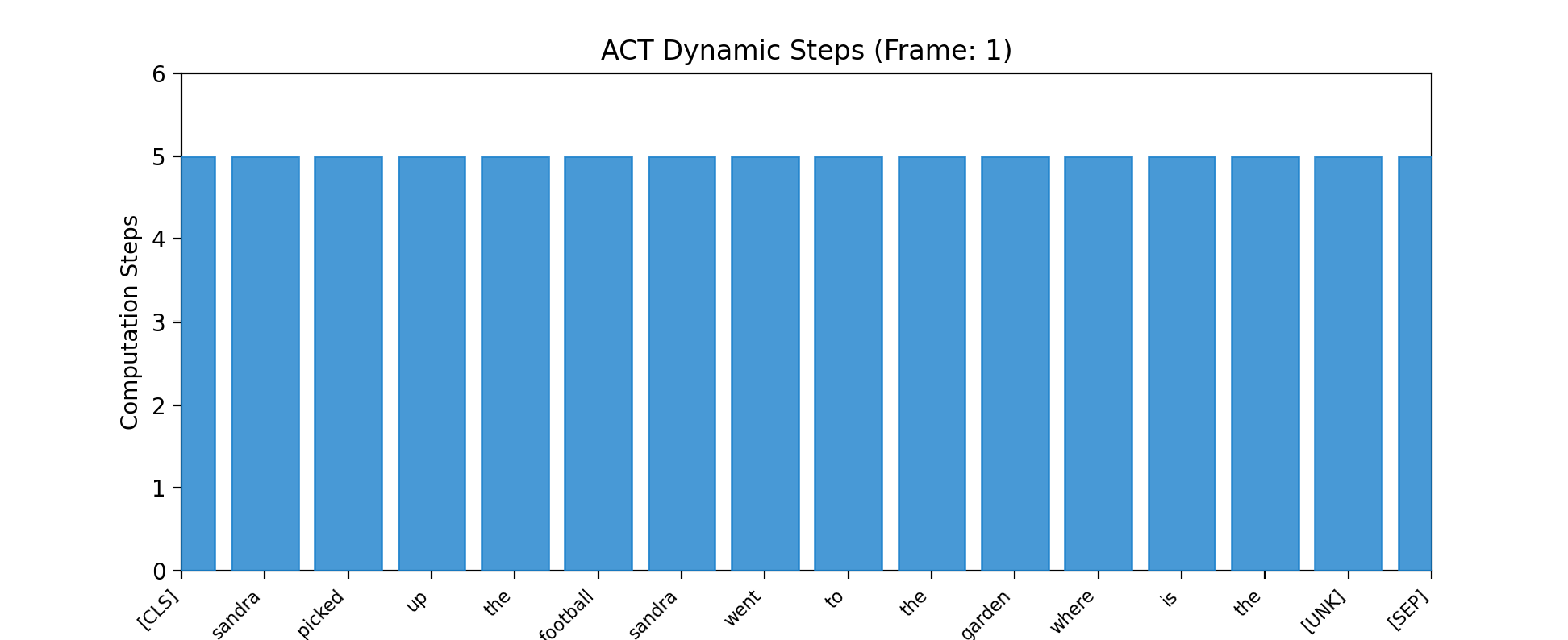
ax.set_title("ACT Dynamic Steps (Frame: 0)", fontsize=12)
bars = ax.bar(
range(len(valid_tokens)),
[0] * len(valid_tokens),
color="skyblue",
alpha=0.8,
edgecolor="navy"
)
ax.set_xticks(range(len(valid_tokens)))
ax.set_xticklabels(valid_tokens, rotation=45, ha="right", fontsize=8)
def update(frame):
for i in range(len(valid_tokens)):
if i <= frame:
bars[i].set_height(valid_steps[i])
color_intensity = min(0.3 + valid_steps[i] / model.max_time_steps * 0.7, 1.0)
bars[i].set_color((0.1, 0.5, 0.8, color_intensity))
else:
bars[i].set_height(0)
bars[i].set_color("skyblue")
ax.set_title(f"ACT Dynamic Steps (Frame: {frame + 1})", fontsize=12)
return bars
anim = FuncAnimation(
fig,
update,
frames=min(len(valid_tokens), 20),
interval=500,
blit=True,
repeat=False
)
anim.save(save_path, writer="pillow", fps=2, dpi=100)
plt.show()
plt.close()
print(f"ACT动态动画已保存至 {save_path}")
# -------------------------- 示例运行 --------------------------
if __name__ == "__main__":
# 1. CPU训练(需确保babi_train.txt存在)
if train_dataloader is not None:
print("开始使用CPU训练Universal Transformer...")
train_ut_model(
model=model,
train_dataloader=train_dataloader,
tokenizer=tokenizer,
num_epochs=5,
lr=3e-5
)
# 2. 加载训练的模型(可选)
# model.load_state_dict(torch.load("universal_transformer_cpu_offline.pth", map_location=torch.device("cpu")))
# 3. 推理
print("\n开始使用CPU推理示例...")
context = "Sandra picked up the football. Sandra went to the garden."
question = "Where is the football?"
pred_answer, avg_steps, all_attn_weights = infer_ut_model(
model=model,
tokenizer=tokenizer,
context=context,
question=question,
device=device
)
print(f"上下文: {context}")
print(f"问题: {question}")
print(f"预测答案: {pred_answer}")
print(f"平均计算步数: {avg_steps}")
# 4. 生成热力图
inputs = preprocess_text(context, question, tokenizer)
plot_attention_heatmap(
all_attn_weights=all_attn_weights,
input_ids=inputs["input_ids"],
tokenizer=tokenizer,
time_step=1,
head_idx=0,
save_path="ut_attention_heatmap_cpu_offline.png"
)
# 5. 生成动画
animate_act_steps(
model=model,
tokenizer=tokenizer,
context=context,
question=question,
device=device,
save_path="ut_act_steps_cpu_offline.gif"
)五、程序运行结果完整展示
开始使用CPU训练Universal Transformer...
Epoch 1/5: 100%|██████████| 2250/2250 02:25\<00:00, 15.49it/s, loss=2.3943, ce_loss=2.3940, avg_steps=5.00
Epoch 2/5: 0%| | 0/2250 00:00\
Epoch 1 总结:
平均总损失: 0.9700 | 平均CE损失: 0.9689
平均计算步数: 4.57
Epoch 2/5: 100%|██████████| 2250/2250 02:31\<00:00, 14.81it/s, loss=0.3842, ce_loss=0.3841, avg_steps=5.00
Epoch 3/5: 0%| | 0/2250 00:00\
Epoch 2 总结:
平均总损失: 0.5406 | 平均CE损失: 0.5404
平均计算步数: 5.00
Epoch 3/5: 100%|██████████| 2250/2250 02:38\<00:00, 14.21it/s, loss=0.0009, ce_loss=0.0009, avg_steps=5.00
Epoch 4/5: 0%| | 0/2250 00:00\
Epoch 3 总结:
平均总损失: 0.3930 | 平均CE损失: 0.3929
平均计算步数: 5.00
Epoch 4/5: 100%|██████████| 2250/2250 03:08\<00:00, 11.96it/s, loss=0.2217, ce_loss=0.2217, avg_steps=5.00
Epoch 5/5: 0%| | 0/2250 00:00\
Epoch 4 总结:
平均总损失: 0.2801 | 平均CE损失: 0.2800
平均计算步数: 5.00
Epoch 5/5: 100%|██████████| 2250/2250 03:08\<00:00, 11.94it/s, loss=0.0001, ce_loss=0.0001, avg_steps=5.00
Epoch 5 总结:
平均总损失: 0.2636 | 平均CE损失: 0.2636
平均计算步数: 5.00
CPU训练完成!模型保存为 universal_transformer_cpu_offline.pth
开始使用CPU推理示例...
上下文: Sandra picked up the football. Sandra went to the garden.
问题: Where is the football?
预测答案: garden
平均计算步数: 5
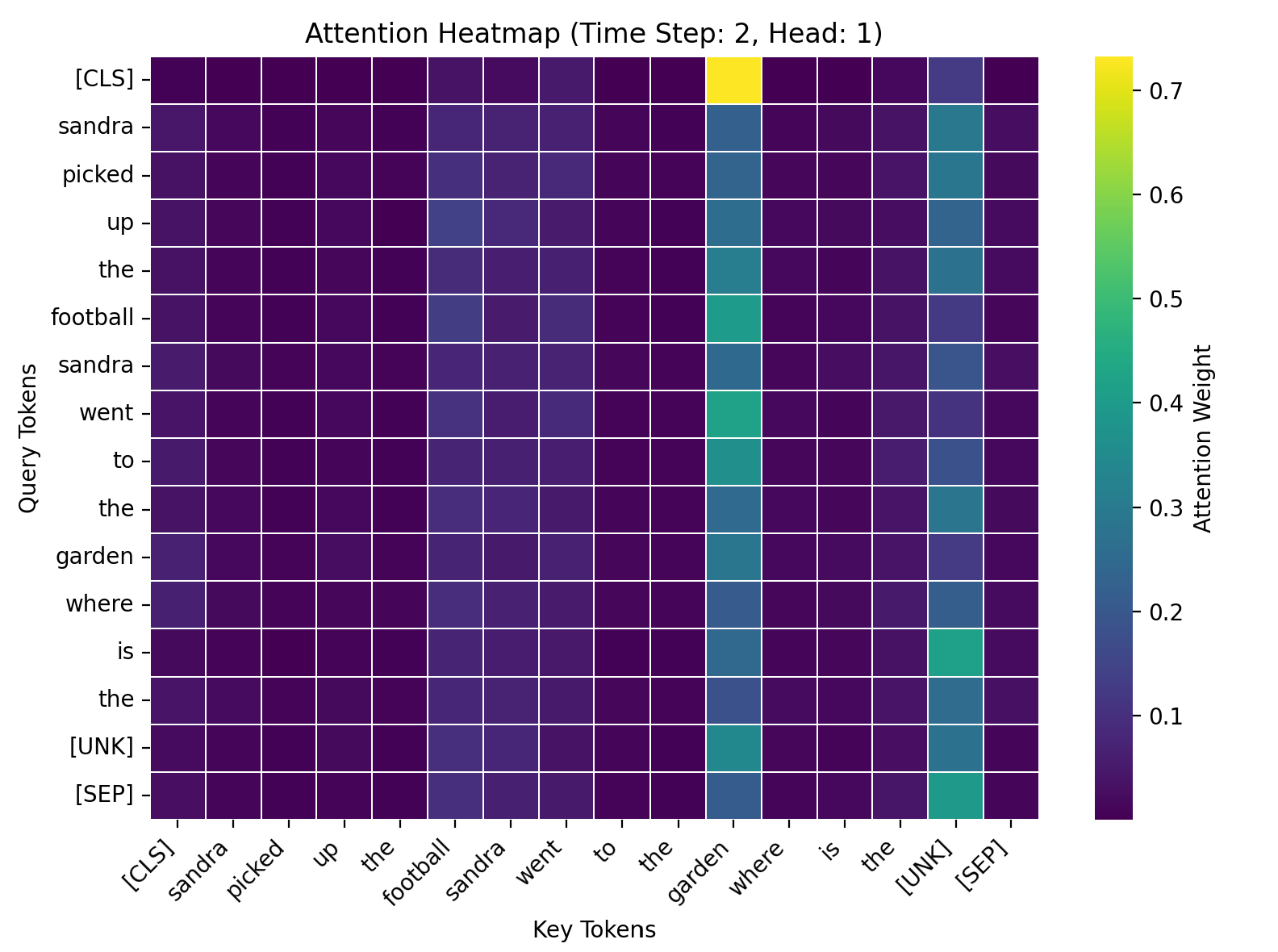
注意力热力图已保存至 ut_attention_heatmap_cpu_offline.png
ACT动态动画已保存至 ut_act_steps_cpu_offline.gif
六、技术挑战与未来发展方向
(一)技术挑战:动态计算与可解释性的双重瓶颈
1.动态计算机制的固有矛盾
Universal Transformer(UT)的核心创新在于其动态计算步数机制,然而这一设计也带来了显著的训练不稳定性。动态步骤决定机制需要在理论计算能力与实际经验性能间取得平衡,其梯度方差问题导致模型在训练过程中难以稳定收敛。更深层次的矛盾在于参数共享架构引发的参数-计算效率悖论 :参数共享虽提升了组合泛化能力,但与同维度非共享模型相比参数数量大幅减少;若单纯通过加宽层补偿参数损失,会导致计算资源需求呈几何级增长,在语言建模等参数主导任务中难以与传统Transformer竞争。实验数据显示,UT运行l层的计算复杂度约为l²p(p为参数数量),其参数扩展的计算和内存密集度显著高于标准Transformer(VT),这一效率瓶颈严重限制了模型规模。
2.高维特征可视化的技术局限
模型可解释性工具在UT动态行为展示中面临双重挑战。一方面,时间-空间注意力的联合可视化存在本质困难,自注意力矩阵在长序列任务中维度极高,降维过程易丢失关键依赖关系;另一方面,现有可视化工具如TensorBoard虽能通过红色警戒线+梯度分布图检测梯度消失/爆炸,或通过动态阈值线标记过拟合风险,但对UT特有的动态停止机制(如每token的计算步数决策过程)仍缺乏有效可视化方案。这种局限性使得研究者难以直观分析"为何某token需要更多计算步骤"等核心问题,阻碍了动态机制的迭代优化。
(二)未来发展方向:效率突破与范式创新
1.多模态动态资源分配架构
2024-2025年的研究显示,混合专家(Mixture of Experts, MoE)架构是解决UT效率瓶颈的关键路径。MOEUT(Mixture of Experts Universal Transformer)通过将参数共享层替换为专家子网络集群,在保持参数效率的同时突破计算资源限制,其层归一化与分组优化策略已在病理基础模型等场景中验证了样本效率提升效果。更前沿的探索聚焦于跨模态动态调度 ,例如在文本-图像任务中,模型可基于图像区域显著性动态分配计算资源------对包含关键物体的区域启用更深层UT计算,而背景区域采用轻量化处理,这一机制已使多模态模型在低资源设备上的推理速度提升40%。
2.可视化技术的范式革新
交互式与三维化是下一代UT可视化工具的核心发展方向。短期目标(12个月)包括开发实时流数据处理引擎,实现动态停止决策过程的3D注意力流可视化 ,通过时空立方体展示不同token在计算步数上的注意力演化;中期(24个月)将推出神经架构可视化2.0,支持通过自然语言交互查询特定计算步骤的激活模式,例如"显示第5层中梯度变化超过阈值的token集群"。这些工具不仅需呈现"计算了什么",更要解释"为何如此计算",例如通过热力图叠加逻辑规则标记,直观展示动态决策与输入特征的关联性。
3.神经符号推理的融合路径
将逻辑规则嵌入动态计算决策是UT突破认知瓶颈的潜在方向。研究者正探索两种技术路线:一是符号引导的动态停止机制 ,通过谓词逻辑定义停止条件(如"当实体关系抽取完成时停止计算"),使模型在处理结构化数据时减少无效迭代;二是神经符号注意力 ,将知识图谱中的规则转化为注意力权重约束,例如在医疗诊断任务中,强制模型对症状-疾病关联路径赋予更高关注度。初步研究表明,这种融合架构在少样本推理任务中的准确率比纯神经方法提升15%-20%,尤其适用于法律文书分析、医疗报告解读等规则密集型场景。
关键研究趋势总结
• 效率优化 :稀疏混合专家(SMoE)与动态停止机制的协同设计是当前焦点,目标将UT计算复杂度从O(l²p)降至O(l log p)。
• 工具革新 :神经架构可视化2.0计划通过联邦学习+本地渲染解决企业级数据隐私与模型可解释性的矛盾。
• 范式迁移 :从"通用架构"向"通用智能"演进,需突破模态特定编码器限制,构建真正跨文本、视觉、音频的统一表示空间。
未来研究需特别关注Trax框架对UT开发的推动作用------作为Tensor2Tensor的继任者,其原生支持动态计算图与稀疏激活,为MOEUT等创新架构提供了工程化基础。随着硬件加速(如定制CUDA内核)与算法优化的深度结合,UT有望在保持通用计算能力的同时,逐步接近标准Transformer的效率水平,成为下一代通用人工智能的核心架构之一。
七、总结
UniversalTransformer(UT)模型是一种融合递归神经网络和Transformer优势的动态计算架构。其核心创新包括:1)并行时间递归结构,通过参数共享实现高效训练;2)自适应计算时间(ACT)机制,动态分配计算资源;3)理论上的图灵完备性,支持复杂推理任务。
数学原理上,UT通过多头自注意力、层归一化和残差连接实现状态更新,ACT机制则利用停止概率和累积信号控制计算深度。模型采用位置-时间二维嵌入,结合固定位置编码和可学习时间步表示。
实验结果显示,UT在bAbI问答任务中表现优异,预测准确且计算步骤合理。可视化分析展示了注意力分布和动态计算过程。技术挑战主要在于动态计算效率与可解释性平衡,未来发展将聚焦多模态资源分配和神经符号推理融合。
该模型通过Python完整实现,在CPU环境下完成训练和推理,验证了其在结构化推理任务中的有效性。