卷积层是卷积神经网络(CNN)的核心组件,其设计灵感来源于人类视觉系统对局部特征的感知机制。它通过卷积操作从输入数据中提取特征,是处理图像、视频等网格结构数据的关键技术。
一、卷积层的核心原理
1. 什么是卷积操作?
卷积操作是通过卷积核(Kernel/Filter) 在输入数据上滑动,对每个局部区域进行元素相乘再求和 的运算,最终生成特征图(Feature Map) 的过程。
直观理解:想象用一个放大镜(卷积核)观察一幅画(输入图像),每次移动放大镜(滑动),就会得到该区域的一个 "特征描述"(特征图上的一个点)。
3×3 卷积核处理 5×5 输入:
输入矩阵 卷积核 计算过程 输出特征图
[[1 2 3] [[1 0 1] 1×1 + 2×0 + 3×1 [[(1+3), (2+4)]
[4 5 6] * [0 1 0] = 4×0 + 5×1 + 6×0 → [(4+6), (5+7)]]
[7 8 9]] [1 0 1] 7×1 + 8×0 + 9×1 可视化卷积原理图
可视化卷积原理图代码放在文章末尾(复制到 Python 环境即可运行)
1.1. 3×3 卷积核(Kernel)
- 含义 :指卷积核是一个 3 行 3 列 的二维矩阵(正方形)。
- 作用 :作为 "特征探测器",每次只关注输入数据中 3×3 大小的局部区域。
- 示例:一个 3×3 的边缘检测卷积核:
[[1, 0, -1],
[1, 0, -1],
[1, 0, -1]]- **为什么是 3×3?**这是深度学习中最常用的卷积核尺寸之一:太小(如 1×1)提取特征能力有限,太大(如 7×7)会增加计算量,而 3×3 既能捕捉局部特征,又能保持计算效率。
1.2. 5×5 输入(Input)
-
含义 :指输入数据是一个 5 行 5 列 的二维矩阵(可以是单通道图像的像素矩阵)。
-
示例:一个 5×5 的灰度图像像素值矩阵:
[[1, 2, 3, 4, 5],
[6, 7, 8, 9, 10],
[11,12,13,14,15],
[16,17,18,19,20],
[21,22,23,24,25]]
1.3. 两者的关系(可视化卷积过程)
当 3×3 卷积核处理 5×5 输入时,过程如下:
- 卷积核从输入的左上角开始,覆盖输入的 (1,1) 到 (3,3) 区域(左上角 3×3 区域)。
- 逐元素相乘后求和,得到输出特征图的第一个值。
- 卷积核按步长(如步长 = 1)向右 / 向下滑动,重复上述计算,直到遍历整个 5×5 输入。
最终输出尺寸 (假设步长 = 1,无填充):输入 5×5 → 卷积核 3×3 → 输出 3×3(计算公式:(5-3)/1 + 1 = 3)。
通过这个过程,大尺寸的输入数据被 "压缩" 为更小的特征图,同时保留了关键的局部特征。
2. 卷积核(Kernel)
- 定义:一个小型的多维数组(图像处理中通常是 2D 矩阵)
- 作用 :充当 "特征探测器",不同的卷积核可以提取不同特征(如边缘、纹理、颜色等)
- 示例 :
- 垂直边缘检测核:
[[1, 0, -1], [1, 0, -1], [1, 0, -1]] - 水平边缘检测核:
[[1, 1, 1], [0, 0, 0], [-1, -1, -1]]
- 垂直边缘检测核:
3. 滑动与步长(Stride)
- 滑动方式:卷积核从输入的左上角开始,从左到右、从上到下滑动
- 步长 :每次滑动的像素数(默认为 1)
-
步长 = 1:相邻两次滑动重叠区域大
-
步长 = 2:滑动幅度大,输出特征图尺寸更小
步长=1时的滑动路径:→→→ (每次移动1格)
步长=2时的滑动路径:→→→ (每次移动2格,间隔更大)
-
4. 填充(Padding)
- 定义:在输入数据的边缘添加 0 值像素
- 作用:控制输出特征图的尺寸,避免边缘信息丢失
- 常见模式 :
padding=0:无填充(输出尺寸缩小)padding=1:在边缘添加 1 圈 0(3×3 卷积核可保持尺寸不变)
尺寸计算公式 :若输入尺寸为H×W,卷积核大小K×K,步长S,填充P,则输出尺寸为:
输出高度 = (H - K + 2P) / S + 1
输出宽度 = (W - K + 2P) / S + 15.卷积的三种模式:full, same, valid
参考卷积的三种模式:full, same, valid_陌上小布的博客-CSDN博客_卷积神经网络valid
二、卷积层的工作流程
以处理 CIFAR10 图像(3 通道,32×32 像素)为例,完整流程如下:
-
输入数据 :形状为
(3, 32, 32)(通道数 × 高度 × 宽度) -
卷积核准备 :假设有 16 个 3×3 的卷积核,每个核形状为
(3, 3, 3)(输入通道 × 核高 × 核宽) -
卷积运算 :
- 每个卷积核与输入的 3 个通道分别卷积,再将结果相加
- 16 个卷积核生成 16 个特征图
-
输出特征图 :形状为
(16, 32, 32)(输出通道数 × 高度 × 宽度)输入 (3,32,32) → [16个(3,3,3)卷积核] → 输出 (16,32,32)
(RGB图像) (提取16种不同特征) (16个特征图)
想更直观理解可参考卷积神经网络之卷积层理解(持续更新)-CSDN博客
三、卷积层的关键优势
-
局部连接:每个神经元只关注输入的局部区域(符合视觉系统特性)
- 例如:3×3 卷积核只关注 3×3 的局部区域
-
权值共享:同一卷积核在整个输入上共享权重
- 优势:大幅减少参数数量
- 对比:32×32 图像用全连接层需要 1024 个参数,而 3×3 卷积核仅需 9 个参数
-
平移不变性:目标在图像中位置变化时仍能被识别
- 例如:无论猫在图像左侧还是右侧,边缘检测核都能识别其轮廓
四、卷积层在 PyTorch 中的实现
nn.Conv2d是 PyTorch 中 2D 卷积层的实现,关键参数如下:
import torch.nn as nn
# 定义一个卷积层
conv = nn.Conv2d(
in_channels=3, # 输入通道数(RGB图像为3)
out_channels=16, # 卷积核数量(输出通道数)
kernel_size=3, # 卷积核大小(3×3)
stride=1, # 步长
padding=1 # 填充(保持尺寸不变)
)
# 输入:批次大小=64,3通道,32×32图像
input_tensor = torch.randn(64, 3, 32, 32)
output_tensor = conv(input_tensor)
print(output_tensor.shape) # 输出:torch.Size([64, 16, 32, 32])五、卷积层的扩展应用
-
不同维度的卷积:
- 1D 卷积:处理序列数据(文本、音频)
- 3D 卷积:处理视频数据(加入时间维度)
-
特殊卷积类型:
-
转置卷积(Transposed Convolution):
- 作用:上采样(增大特征图尺寸)
- 应用:图像分割、生成对抗网络(GAN)
-
深度可分离卷积(Depthwise Separable Convolution):
- 原理:将标准卷积拆分为 "深度卷积" 和 "逐点卷积"
- 优势:减少计算量和参数数量(MobileNet 等轻量网络核心)
-
空洞卷积(Dilated Convolution):
- 特点:卷积核中加入 "空洞"(空格),增大感受野
- 应用:语义分割(无需下采样即可获得大视野)
-
-
实际应用场景:
- 图像分类(ResNet、EfficientNet)
- 目标检测(YOLO、Faster R-CNN)
- 图像生成(StyleGAN、Stable Diffusion)
- 医学影像分析(肿瘤检测)
六、可视化理解卷积层效果
通过可视化不同层的特征图,可以直观理解卷积层的工作:
-
浅层卷积层:提取边缘、纹理、颜色等低级特征
- 示例:垂直边缘、水平边缘、斑点等
-
深层卷积层:提取更复杂的高级特征
- 示例:眼睛、车轮、纹理组合等
输入图像 → 第1层特征图(边缘) → 第2层特征图(局部形状) → 第3层特征图(物体部件)
七、总结
卷积层通过卷积核的滑动计算,实现了对输入数据的局部特征提取,凭借局部连接、权值共享等特性,在保持强大特征提取能力的同时大幅减少了参数数量。从简单的边缘检测到复杂的图像生成,卷积层已成为计算机视觉领域不可或缺的核心技术,也是理解更复杂神经网络(如 Transformer 与 CNN 结合模型)的基础。
可视化卷积原理图代码(复制到 Python 环境即可运行)
python
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches
# ---------------------- 1. 定义卷积相关参数 ----------------------
# 输入:5×5的模拟灰度图像(像素值0-255)
input_matrix = np.array([
[10, 20, 30, 40, 50],
[60, 70, 80, 90, 100],
[110, 120, 130, 140, 150],
[160, 170, 180, 190, 200],
[210, 220, 230, 240, 250]
], dtype=np.float32)
# 卷积核:3×3的边缘检测核(垂直边缘)
kernel = np.array([
[1, 0, -1],
[1, 0, -1],
[1, 0, -1]
], dtype=np.float32)
stride = 1 # 步长
padding = 0 # 无填充
# 计算输出特征图尺寸
in_h, in_w = input_matrix.shape
kernel_h, kernel_w = kernel.shape
out_h = (in_h - kernel_h + 2 * padding) // stride + 1
out_w = (in_w - kernel_w + 2 * padding) // stride + 1
output_matrix = np.zeros((out_h, out_w), dtype=np.float32) # 初始化输出
# ---------------------- 2. 计算卷积结果(核心过程) ----------------------
for i in range(out_h):
for j in range(out_w):
# 确定当前卷积核在输入上的位置(滑动窗口)
h_start = i * stride
h_end = h_start + kernel_h
w_start = j * stride
w_end = w_start + kernel_w
# 局部区域提取 + 元素相乘 + 求和(卷积核心运算)
local_region = input_matrix[h_start:h_end, w_start:w_end]
output_matrix[i, j] = np.sum(local_region * kernel)
# ---------------------- 3. 绘制可视化图 ----------------------
fig, axes = plt.subplots(1, 3, figsize=(15, 5)) # 1行3列布局:输入、卷积核、输出
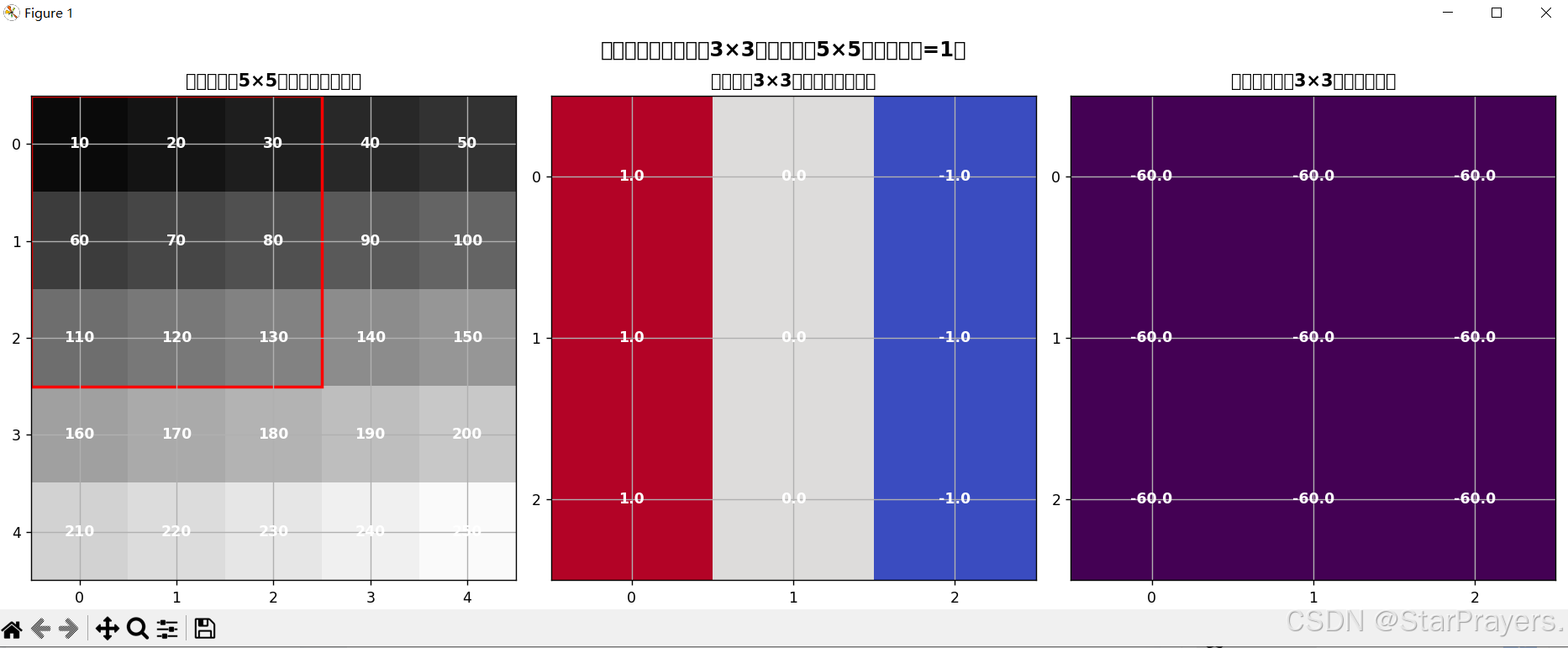
fig.suptitle('卷积层原理可视化(3×3卷积核处理5×5输入,步长=1)', fontsize=14, fontweight='bold')
# 子图1:输入矩阵(5×5)
ax1 = axes[0]
ax1.imshow(input_matrix, cmap='gray', vmin=0, vmax=255)
ax1.set_title('输入矩阵(5×5,模拟灰度图像)', fontweight='bold')
# 标注像素值
for i in range(in_h):
for j in range(in_w):
ax1.text(j, i, int(input_matrix[i, j]), ha='center', va='center', color='white', fontweight='bold')
# 绘制初始滑动窗口(3×3红色边框)
rect = patches.Rectangle((-0.5, -0.5), kernel_w, kernel_h, linewidth=2, edgecolor='red', facecolor='none')
ax1.add_patch(rect)
ax1.set_xticks(range(in_w))
ax1.set_yticks(range(in_h))
ax1.grid(True)
# 子图2:卷积核(3×3)
ax2 = axes[1]
ax2.imshow(kernel, cmap='coolwarm', vmin=-1, vmax=1)
ax2.set_title('卷积核(3×3,垂直边缘检测)', fontweight='bold')
# 标注卷积核数值
for i in range(kernel_h):
for j in range(kernel_w):
ax2.text(j, i, kernel[i, j], ha='center', va='center', color='white', fontweight='bold')
ax2.set_xticks(range(kernel_w))
ax2.set_yticks(range(kernel_h))
ax2.grid(True)
# 子图3:输出特征图(3×3)
ax3 = axes[2]
ax3.imshow(output_matrix, cmap='viridis')
ax3.set_title('输出特征图(3×3,边缘特征)', fontweight='bold')
# 标注输出值(保留1位小数)
for i in range(out_h):
for j in range(out_w):
ax3.text(j, i, f'{output_matrix[i, j]:.1f}', ha='center', va='center', color='white', fontweight='bold')
ax3.set_xticks(range(out_w))
ax3.set_yticks(range(out_h))
ax3.grid(True)
plt.tight_layout()
plt.savefig('卷积层原理可视化.png', dpi=300, bbox_inches='tight') # 保存图片(300分辨率,清晰)
plt.show()