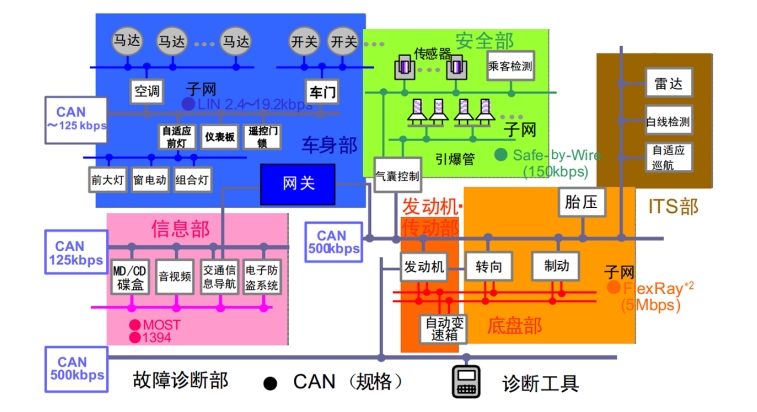
一、CAN(多主、错误检测)
(一)CAN简介:控制器局域网络,也是多主方式的串行通信协议,主要用于汽车行业。
(二)CAN的特点
1.多主控制
2.所有消息都以固定格式发送(广播的通信模式)
3.系统柔软性:无地址类信息,所以增加单元时,连接在其他总线上的软硬件不需要改变
4.通过是"遥控帧",请求其他单元发送数据
5.所有单元都有:错误检测功能。错误通知功能、错误恢复功能
6.故障封闭:当总线上发生持续错误时,故障单元会被从总线上隔离出去
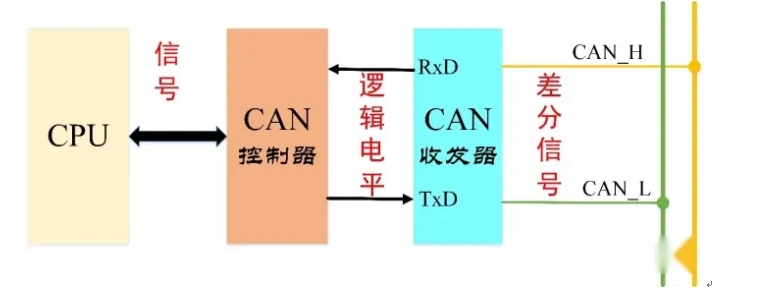
(三)电平分类(差分传输)
1.显性电平表示逻辑"0", CAN_H电平 3.5V ,CAN_L电平1.5V,电位差为 2V。
2.(空闲状态)隐形电平表示逻辑"1", CAN_H 和 CAN_L 电压都为 2.5V 左右,电位差为 0V。
(四)收发过程
(五)电路结构
1.闭环结构
2.开环结构
(六)消息格式
1.帧起始(SOF) 1位 表示一帧的开始,总线空闲时任意单元可发起
2.仲裁段 11位标准ID(12~32位)
3.控制段 6位
4.数据段 0~64位
5.CRC段 16位 15位CRC效验码,!位CRC定界符
6.ACK段 2位
7.帧结束(EOF) 7位
8.帧间隔(IFS) 大于等于3位
(七)仲裁机制:ID号的线于特性(逐位比较),标识符越小优先级越高
二、imx6ull摄像头模块
(一)CSI接口适配器,用于解耦各种类型的摄像头
(二)使用OV5640的CMOS摄像头
三、STM32概述(STM32F103C8T6、通用型经典款)
(一)HAL库+STM32CubeMX配置信息生成代码+keil5
(二)STM32F1系列,CortexM3内核:8MHZ的晶振。主频配置为为72MHZ
(三)哈弗架构
(四)GPIO的输入输出模式
1.输入模式
①浮空输入:这时候GPIO处于高阻抗状态,电平由外部电路决定,容易受干扰
②上拉输入:内部接上拉电阻,默认高电平,当外部接地时读到低电平。
③下拉输入:内部接下拉电阻,默认低电平,外部接高电平时读到高电平。
④模拟输入:用于ADC读取模拟信号,比如温度传感器的电压值,此时引脚不进行数字处理。
2.输出模式
①开漏输出:只能输出低电平或高阻态,需要外部上拉电阻才能输出高电平
②推挽输出:可以输出高或低电平,驱动能力强,高低电平由MOS管推挽结构控制。
③推挽式复用:用于外设功能,如SPI、USART的TX引脚,由外设控制,结构同推挽。
④开漏复用:类似开漏,但由特定外设控制
(五)1us延时:HAL库中最小1ms,所有得配置时钟
(六)DMA(代替CPU存取数据)
1.STM32F1系列有两个DMA,总共12个通道,每个通道可对应不同外设的DMA请求仲裁器:当发生多个DMA通道请求,由仲裁器管理响应顺序
2.外设-->DMA请求-->DMA控制器
DMA控制器-->应答信号-->外设
外设-->应答信号-->DMA控制器
启动DMA传输,直到传输结束